蓝绿光通信在无人水下航行器组网中的应用
2023-09-08聂文超李怀亮魏佳广张西伟冯晓伟廖佩璇李广英
聂文超 ,李怀亮 ,魏佳广 ,张西伟 ,李 鹏 ,冯晓伟 ,廖佩璇,李广英
(1.中国科学院西安光学精密机械研究所,陕西 西安,710119;2.海洋石油工程股份有限公司 安装分公司,天津,300461)
0 引言
近年来在海洋强国战略指导下,我国加快了“透明海洋”计划实施,加强了海洋观测装备的研发,已逐步构建起新一代全球海洋高时空分辨率立体观测网[1]。伴随着大量分布式预置水下长期值守观测站的建立,监测数据呈现爆炸式增长,如何进行水下大容量数据高速交互及回收的问题日益凸显。
水下机动式装备呈现系列化快速发展,包含自主水下航行器(autonomous undersea vehicle,AUV)、水下遥控航行器(remote operated vehicle,ROV)以及水下仿生航行器等,具有无人化和智能化作业的特点。2022 年,美国波音公司研制出超大型无人水下航行器(unmanned undersea vehicle,UUV)“虎鲸”号(见图1),并进行了海试[2]。同年,我国首艘智能型无人系统母船“珠海云”号(见图2)在广州下水,具备远程遥控和自主航行功能,甲板上能够搭载数十台空、海、潜无人系统装备,可在目标海域进行批量化布放。

图1 “虎鲸”号超大型无人水下航行器Fig.1 Orca extra large UUV

图2 “珠海云”号无人系统母船Fig.2 Zhuhai Cloud unmanned system master ship
可以看出,未来海洋无人智能型装备具有网络化、集群化的发展趋势,海量数据实时交互、高速传输成为制约透明智能化海洋建设的关键技术。针对水下传统声通信传输速率较低的问题,近年来国内外在水下光通信领域进行了大量研究,旨在发展基于光通信的高带宽、高速率和高隐蔽性的水下信息传输网络。文中调研了声通信和光通信在UUV 组网中应用的特点,提出了基于激光二极管(laser diode,LD)窄束长距离高速激光通信和发光二极管(light emitting diode,LED)准全向蓝绿光通信的水下移动式局域组网方案,以期为水下察打一体观测网和水下末端突防系统的研制提供技术支撑。
1 UUV 组网及可见光通信技术研究现状
水下通信组网是以各类UUV 智能控制和协同编队技术为基础,以声通信或光通信设备为核心载体,实现多平台间的互联互通,已成为海洋观测探测的重要手段[3]。
水声通信是水下中远距离上,应用于无线通信、探测、定位的主要手段。自1998 年开始,美国麻省理工学院就开展了水下探测网络的通用海洋阵列技术系统(generic oceanographic array technology system,GOATS)研究,并在1998—2014 年开展了一系列的水声组网探测试验[4]。美国海军于2006 年开始研制水下持续监视网(persistent littoral underwater surveillance network,PLUSNet),并以巡航导弹核潜艇为母节点,以核潜艇携带的UUV 为移动子节点,以水下潜标、浮标和水声探测阵为固定子节点而构成的一种潜布式海底固定加机动的水下网络,可获取海洋环境信息和水下目标信息,为水下作战提供信息化支撑[5]。自我国在“863”计划的自动化领域智能机器人主题中首次立项支持声通信机研制,到我国载人深潜“蛟龙号”实现在 8~10 km 距离内以最高10 kb/s 的速率传输数据、语音和图像,中科院声学所已经完成了多型声通信机设备研制。此外,国内多家单位开展了水声通信与组网技术的理论研究、样机研制和湖海试验,发展迅速[6]。
可见光通信(visible light communication,VLC)是一种利用波长在380~790 nm 范围内的可见光进行数据通信的无线传输技术,具有不受无线电干扰、无电磁辐射、高度保密性的高速通信方式。2015 年,美国肯尼迪航天中心签署了太空行动协议,其主要面向VLC 网络在照明系统和协同全球定位系统改善通信网络环境的研究[7]。2021 年4 月,英国 PureLiFi 公司宣布向美国陆军提供新一代的无线光通信组网产品——Kitefin,说明了VLC组网技术未来在国防中将占据重要地位[8]。2013年,复旦大学设计了一套全双工VLC 系统,进行了低误码率和高速率的可行性研究[9],并在2014 年对VLC 接入网络开展试验验证,设计了光纤和可见光的异构网络以支持32 个用户同时进行高速通信[10],证明了VLC 组网的能力。2019 年,清华大学提出了一种基于LD 和LED 混合组成的水下无线光通信组网技术,该技术能够通过混合通信系统来提升受限节点网络的通信周期和信息容量[11]。
2 水下光通信技术
2.1 国内外研究现状
水下VLC 技术利用海水的透光窗口对蓝绿波段可见光吸收损耗极小的特性,采用光波长为450~570 nm 的蓝绿光束为载波,在水下中近距离进行高速信息传输,可实现跨域跨介质通信,从而进一步完善水下信息传输体系的保障能力,在未来海洋开发中基于水下光通信技术构建的新型立体通信网络,将在民用/国防等通信、探测领域发挥重要作用。
2016 年,英国的水下技术公司Sonardyne 向韩国船舶和海洋工程研究所(Korea Research Institute of Ships and Ocean Engineering,KRISO)提供了水下通信设备BlueComm200,其速率达20 Mb/s,距离达100 m,可完成水下高清图像的传输。2017 年,日本海洋研究开发机构(Japan Agency for Marine-Earth Science and Technology,JAMSTEC)开展了水下双向无线光通信试验,在800 m 水深海域中,实现了20 Mb/s 传输速率、100 m 距离上的可靠通信[12]。
2019 年,西安光机所在三亚半山半岛帆船港口开展了光通信设备性能测试,采用蓝光大功率LED 和大面积光电倍增管(photo multiplier tube,PMT)探测器,设计出“大角度发射—宽视场接收”的光通信机,实现了20 m 通信距离下,传输速率为20 Mb/s 的全双工高速通信[13]。此后,西安光机所又研制了一型全海深光通信机,并于2020 年11 月搭载在“奋斗者”号载人水下航行器 和“沧海号”着陆器上,在马里亚纳海沟成功实现了万米海底的4K 超高清画面直播。2023 年1 月,西安光机所在丹江口水域对两型光通信样机进行了湖上试验,无线光通信机依靠固定工装下潜到指定水位,由吊机调整相对距离,分别在相对静止和相对运动状态下对其进行了通信性能测试。同年3 月,在中国南海陵水进行了海试以验证光通信机功能及性能指标的可靠性,通过中继器搭载上述光通信设备,由吊机垂直吊放,与船舷外伸固定杆端搭载光通信机进行垂直通信,试验过程如图3 所示。

图3 海上试验Fig.3 Sea trial
2.2 典型水下高速光通信工程样机
近年来,西安光机所针对水下准全向一对多光通信机技术和水下长距离窄束激光通信技术展开了深入研究,相继开发出了可应用于2 000、6 000和11 000 m 不同海深的系列化工程样机。
水下无线光通信机产品从光源形式上主要分为LD 和LED 两大类,从结构形式上主要分为收发一体和收发分离式2 种,如图4 所示。

图4 水下无线光通信样机Fig.4 Underwater wireless optical communication prototypes
一般来讲,水下无线光通信机由发射系统和接收系统两大功能模块组成。发射系统具体包含供电单元、信号处理单元(调制)和光发射单元;接收系统包含供电单元、信号处理单元(解调)和光接收单元。水下无线光通信机具体功能组成如图5所示。
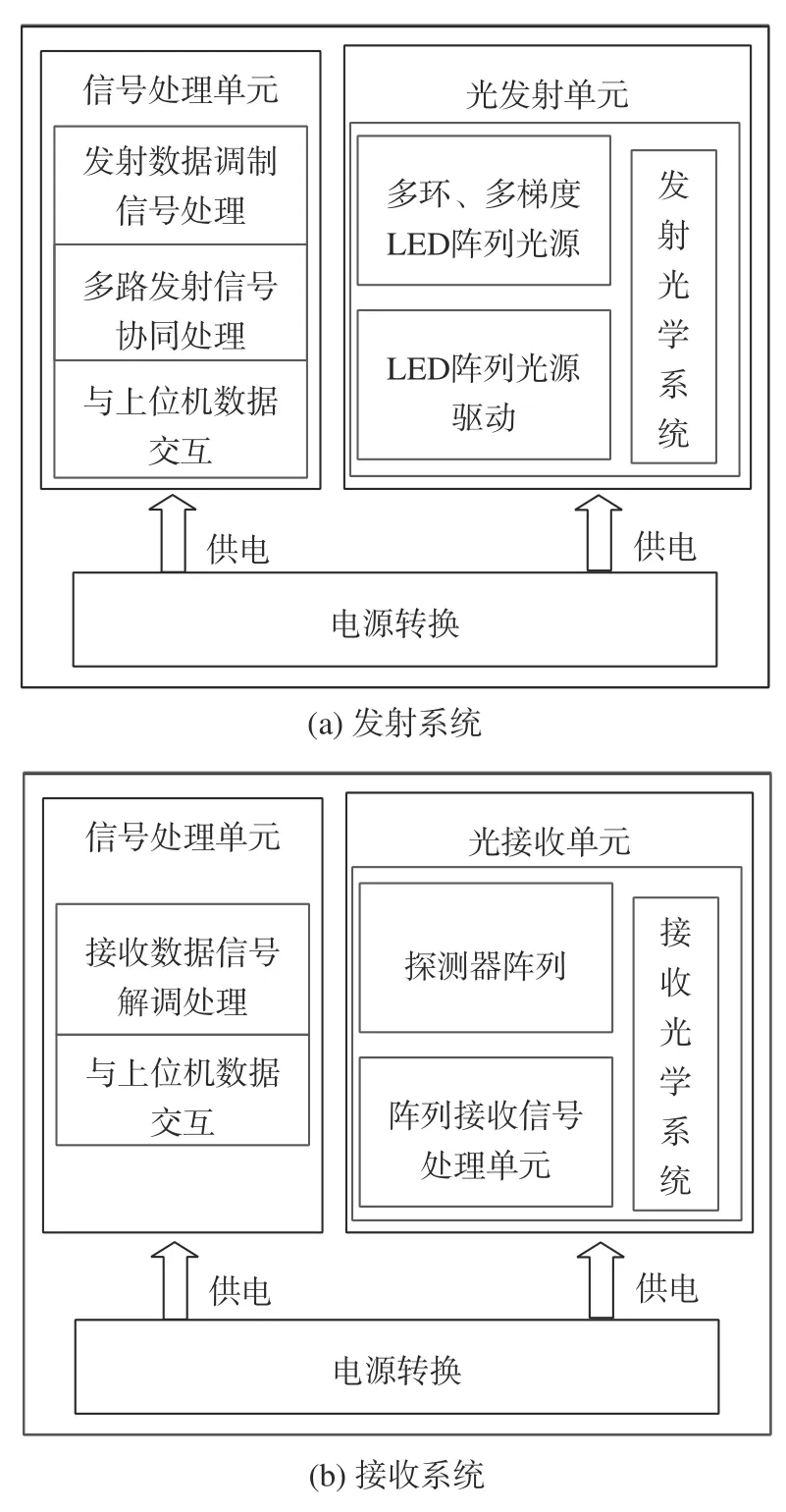
图5 水下无线光通信机功能组成Fig.5 Functional composition of underwater wireless optical communication equipment
1) 收发一体式光通信机
收发一体式光通信机采用带平面光学窗口的密封舱结构,接收单元布置在中心区域,外围布置环形LED 发射阵列。在一类水质中最高通信速率20 Mb/s,最远通信距离100 m,支持最大工作水深6 000 m,质量6 kg,单机尺寸为Φ120 mm×300 mm,采用蓝梭水密式接插件,具有1 个供电接口和1 个标准网络数据接口。
2) 收发分离式光通信机
收发分离式光通信机单个终端由2 个密封舱体构成,一个密封舱体装有发射单元,另一个密封舱体装有接收单元,二者由外部线缆连接进行供电及数据交互,构成一个整体。密封舱体具有半球形密封窗口,视场角可达120°,具有较高的收发隔离度,在一类水质下最大通信速率可达25 Mb/s,通信距离150 m,最大工作水深6 000 m。
3 光通信在UUV 集群中的应用设想
水下光通信按照发射光源类型一般可分为LD窄束激光通信和LED 准全向通信两类。LD 窄束激光通信一般需要捕获、瞄准和跟踪(acquisition pointing tracking,APT)系统满足强对准条件,可实现长距离高速通信。LED 准全向光通信利用大发散角光束来降低终端对准要求,能够获得良好的动中通性能。
在实际应用中,母艇工作水域一般较深,水质较好,母艇自主布放UUV 与母艇间初始指向不确定区域较小,适合使用激光建立防区外高速长距离通信链路。机动平台与固定基站,或机动平台之间,由于相对定位复杂,初始指向不确定区域较大,同时要实现广播式多对多通信,适合用LED 准全向光通信。
文中针对水下机动式平台和预置式长期值守平台的典型应用场景(如图6 所示),设计了水下移动式局域光通信网络架构,系统框图见图7。
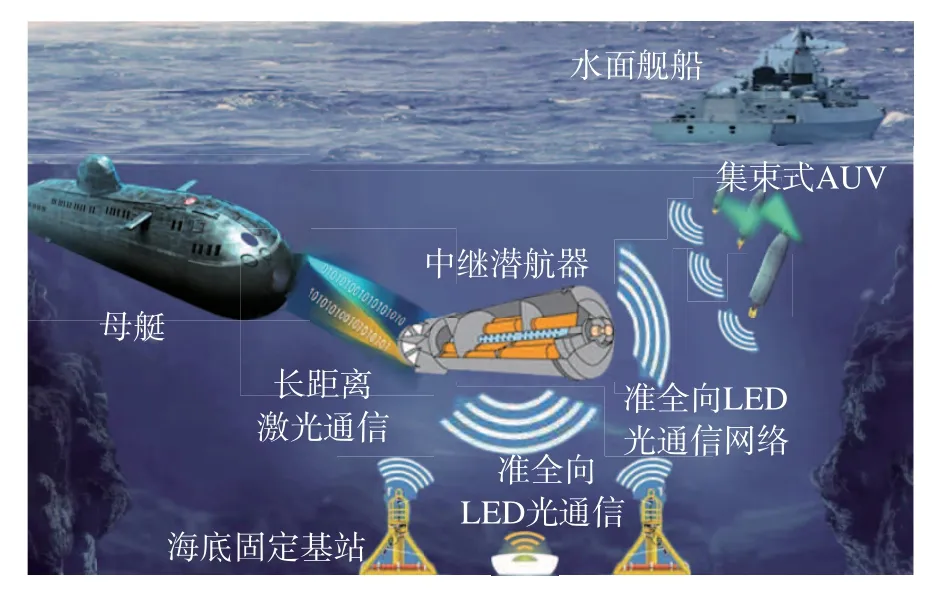
图6 UUV 光通信组网典型应用场景Fig.6 Typical application scenarios for optical communication networking of UUVs
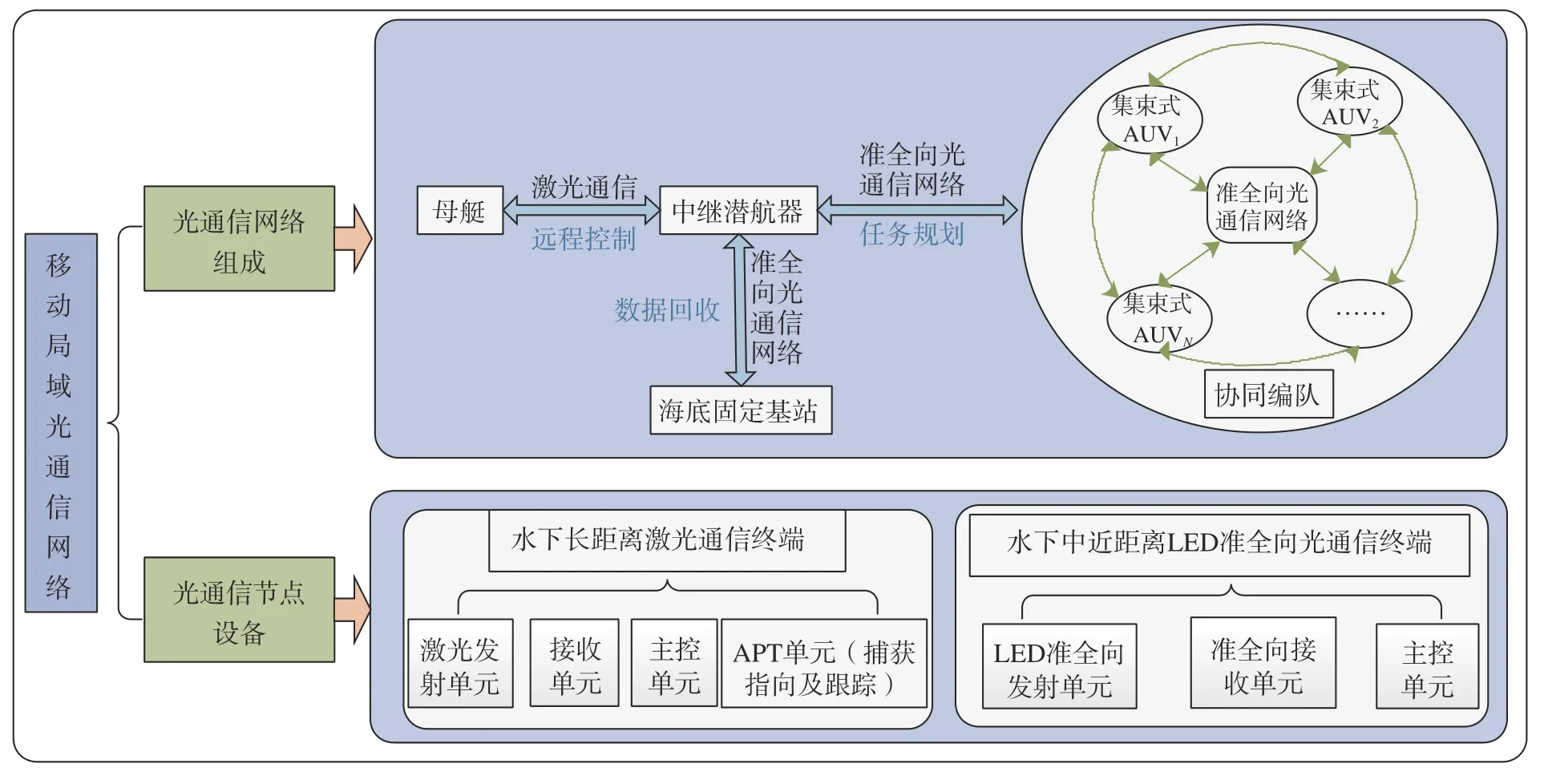
图7 移动式局域光通信网络系统框图Fig.7 Block diagram of local mobile optical communication network system
最小局域组网单元由母艇、中继UUV、海底基站以及集束式AUV 构成。母艇负责布放回收和全局控制;中继UUV 由母艇释放,自身携带多枚集束式AUV,通过中继UUV 延伸母艇的作业半径,同时中继UUV 执行自适应巡航,对指定区域的海底基站进行巡视,完成海底基站的指令下发及监测数据回收,最终回传母艇,实现特定海域的态势感知;海底基站是预置式长期值守装备,用于海洋信息监测和收集;集束式AUV 由动力单元、主控单元、通信单元和任务单元构成,与中继UUV进行数据交互,由中继UUV 进行任务规划和分配,也可实现各AUV 节点之间数据交互,集束式AUV侧重于高效协同和高速机动能力,适用于分布式信息搜集和集群化末端突防等任务。
基于水下装备平台搭载相应的光通信机,建立移动式局域光通信网络,具体由3 层子网拓扑组成,第1 层: 母艇与中继UUV 由挂载的水下长距离激光通信机建立高速光通信链路,通信距离达到1 km 以上,保障母艇作业安全;第2 层: 中继UUV 与海底基站或集束式AUV 之间由LED 准全向光通信机建立局域光通信网络,实现中继UUV对下一级装备的控制和数据交互;第3 层: 集束式AUV 在分离之后,个体之间采用LED 准全向光通信机建立局域光通信网络,可实现编队协同。
该移动式局域光通信网络可根据具体任务规划布设网络节点,通过高速光通信进行实时数据(包含语音、图片和视频等)交互,提高水下各平台的信息共享和协同控制能力。
4 结束语
文中介绍了基于水声通信和无线光通信的UUV 组网通信技术现状,着重介绍了水下蓝绿光通信的研究进展和工程应用水平,并提出了根据不同型号UUV 的特点,分别搭载基于LD 窄束长距离激光通信机和LED 准全向光通信机,从而建立水下高速信息传输的移动式局域组网方案。
水下光通信技术虽已取得多项重要成果,但距离成熟的工程应用还有差距。主要表现在如何实现长距离通信和多对多随机接入两方面。后续将针对上述问题开展深入研究,着眼于水下光场调控理论研究、水下准全向光通信技术和多址随机接入等3 项关键技术,进一步提升国产水下光通信机性能,结合具体应用场景实现水下光通信组网并进行示范应用。
