舰船腐蚀相关静态电场水下电位特征研究
2023-09-08杨鹏程杨靖浩姜润翔
杨鹏程 ,杨靖浩 ,姜润翔
(1.海军工程大学 电气工程学院,湖北 武汉,430033;2.中国船舶集团有限公司 第708 研究所,上海,200011)
0 引言
舰船电场是除声场、磁场和水压场之外又一明显的船舶物理场特征,按其形成的原因可分为静电场、轴频电场、谐波电场和感应电场等[1-3]。其中,舰船静电场信号的量级较大,可被应用于重点海域、要地及要道的警戒封锁系统的研制,如俄罗斯研制的KOMOR 电磁封海系统[4]。文献[5]基于实测数据,分析了舰船电场的特性,但是其分析是建立在单节点测量系统基础上的,难以满足全面掌握舰船电场特征的要求。为了全面掌握舰船静电场信号的特征,除了建立数值仿真计算模型外,还可依托缩比模型和实船试验。文中在电场测量阵列的基础上,基于典型模型试验与实船试验,分析了舰船静电场的水下电位特征。
1 舰船腐蚀相关静电场
舰船是由多种材料组成的复杂结构物,主要有低合金钢、铸钢、铜合金、铝合金、不锈钢和钛合金等。由于不同金属材料在海水中的电极电位不同,当它们之间存在电连接时,将形成腐蚀原电池,从而在回路中产生电流[6-7]。随着电流的产生,阳极将逐渐被腐蚀,而阴极得到保护,最后达到动态平衡,在海水中产生稳恒电流。为了保护船体不受腐蚀,现代船舶上普遍采用了外加电流阴极保护(impressed current cathodic protection,ICCP)系统和牺牲阳极阴极保护系统产生防腐电流。腐蚀电流和保护电流均会导致船体周围出现电场信号,称为腐蚀相关静电场信号(简称为静电场信号)[8],钢制船体与铜制通海阀电化学腐蚀产生的水下电位信号如图1 所示,图中:U为水下电位;h为测量深度。
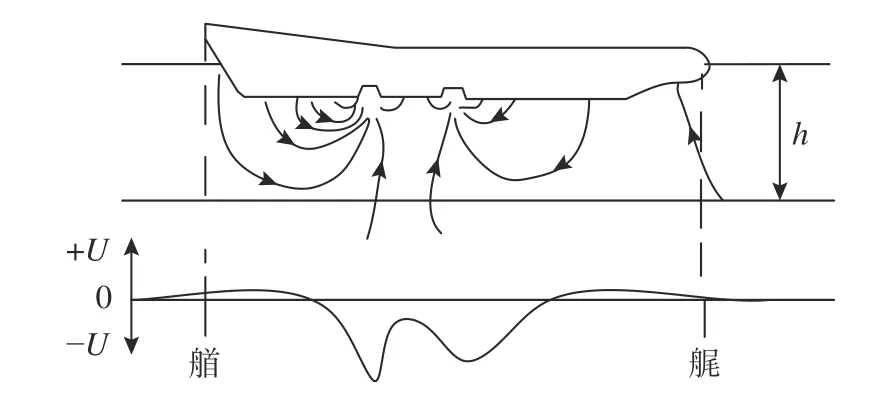
图1 “船体-通海阀”产生的水下电位信号Fig.1 Underwater potential signal generated by hullaccess valve
2 缩比模型试验
船体表面异种金属分布的多样性、舰船阴极保护系统设计的差异性,均将导致舰船静电场信号的多样性。缩比模型试验重点对阴极保护系统对舰船静电场的影响进行了分析。试验船模长4.13 m,宽0.57 m,吃水深度为0.13 m,船体艏部安装有侧推青铜桨,艉部安装有主推青铜桨,内部安装有被动轴接地装置,船体艏侧推槽道内、减摇鳍和舵板安装有可以实现外部连接的3 对牺牲阳极,船体表面安装有8 对辅助阳极和16 个监测参比电极,辅助阳极、参比电极和船体分别与电化学工作站的CE、RE、WE 端连接,可实现对ICCP 系统的模拟。牺牲阳极与ICCP 保护系统的布置图见图2。
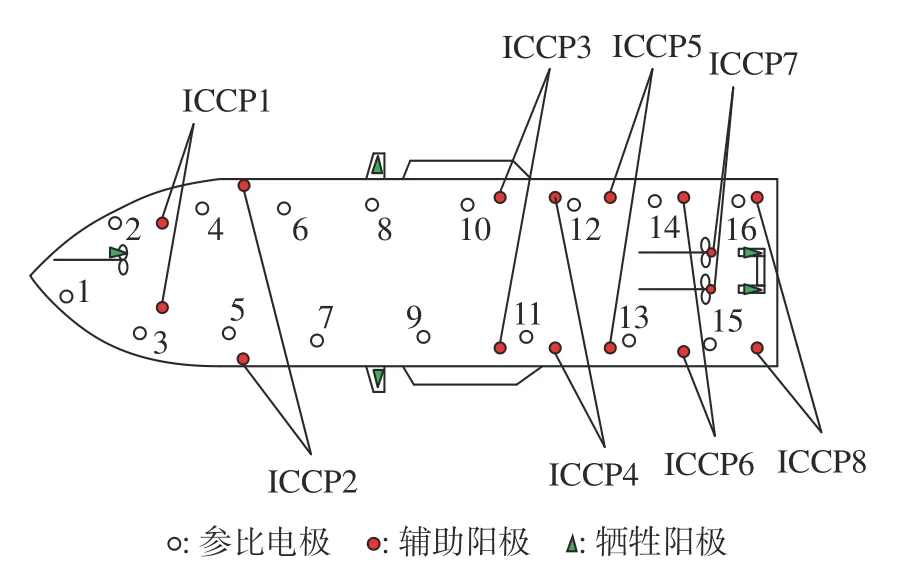
图2 牺牲阳极与辅助阳极布置图Fig.2 Layout of sacrificial anodes and auxiliary anodes
试验水池长14 m,宽7 m,水深1.08 m,水池上安装有导轨和拖曳装置,可实现对缩比模型的拖动,水池内部安装4 个不同深度平面的电场测量阵列。其中,4 个不同深度依次为0.5B(B为船宽)、25 m、1.0B、1.5B按照1∶60 缩比对应的深度,分别为28.5、41.7、57、85.5 cm,每个深度的9个测量Ag/AgCl电极间距为142.5 mm。基准Ag/AgCl电极(零电极)与测量电极的最小距离为3 m,缩比模型通过电场测量阵列的现场照片如图3 所示。

图3 缩比模型通过电场测量阵列的现场照片Fig.3 Field photos of scale model passing through electric field measurement array
将36 个测量电极与基准电极的信号传输至高精度24 位采集器,采样频率设定为100 Hz,实时记录水下电位信号。缩比模型以13.77 cm/s 的速度通过测量阵列,不同船体状态条件下深度20 m(缩比为41.7 cm)平面的水下电位信号如图4 所示(船艏及船艉对应的位置分别为1.377 m 和5.508 m)。图4 中不同船体状态分别对应于8 种不同状态,分别为: 状态1,船体自然腐蚀;状态2,船体-艏侧推桨电化学腐蚀;状态3,船体-艏侧推-艉部桨电化学腐蚀(舰船工作时的初始状态);状态4,状态3 工作前提下艏侧推牺牲阳极阴极保护;状态5,状态3工作前提下减摇鳍牺牲阳极阴极保护;状态6,状态3 工作前提下艉舵牺牲阳极阴极保护;状态7,状态3 工作前提下艏侧推、减摇鳍、艉舵牺牲阳极阴极保护;状态8,状态7 工作条件下的外加电流阴极保护。
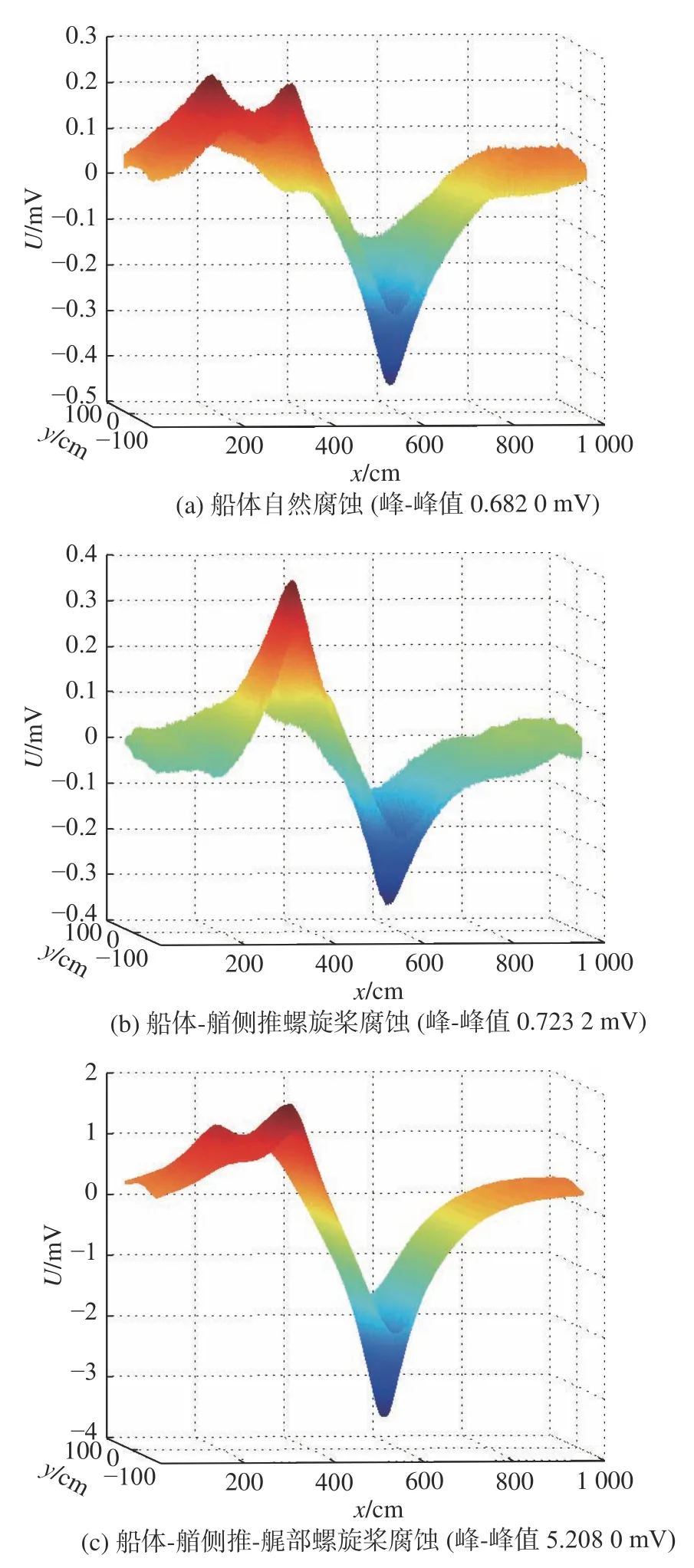

图4 深度41.7 cm 平面不同阴极保护状态条件下水下电位信号Fig.4 Underwater potential signals under different cathodic protection conditions at a depth of 41.7 cm
由图4(a)可知,即使船体上未安装有异种金属,船体钢及焊料之间的微腐蚀与电化学腐蚀依然会产生水下电位信号,但其幅度相对较小;对比图4(c)~图4(f)可知,相对于舰船工作时的初始状态,不同位置的牺牲阳极工作后,对水下电场的影响是不同的,如艉舵牺牲阳极工作时,将导致水下电位的峰-峰值降低,即可通过合理的布放牺牲实现电场隐身;对比图4(b)~图4(h)可知: 1) 不同船体状态条件下的水下电位的波形、幅度都存在较大的差别,即舰船水下电场与电化学腐蚀与阴极保护状态密切相关;2) 在近场范围内,舰船水下电位信号具有多峰的特点,且峰值点对应于主要电场源的位置。
牺牲阳极阴极保护状态条件下,不同深度平面的水下电位信号如图5 所示。对比图4(g)与图5可知,随着测量深度的增加,水下电位信号逐渐平滑,即接近于偶极子产生的电位信号。

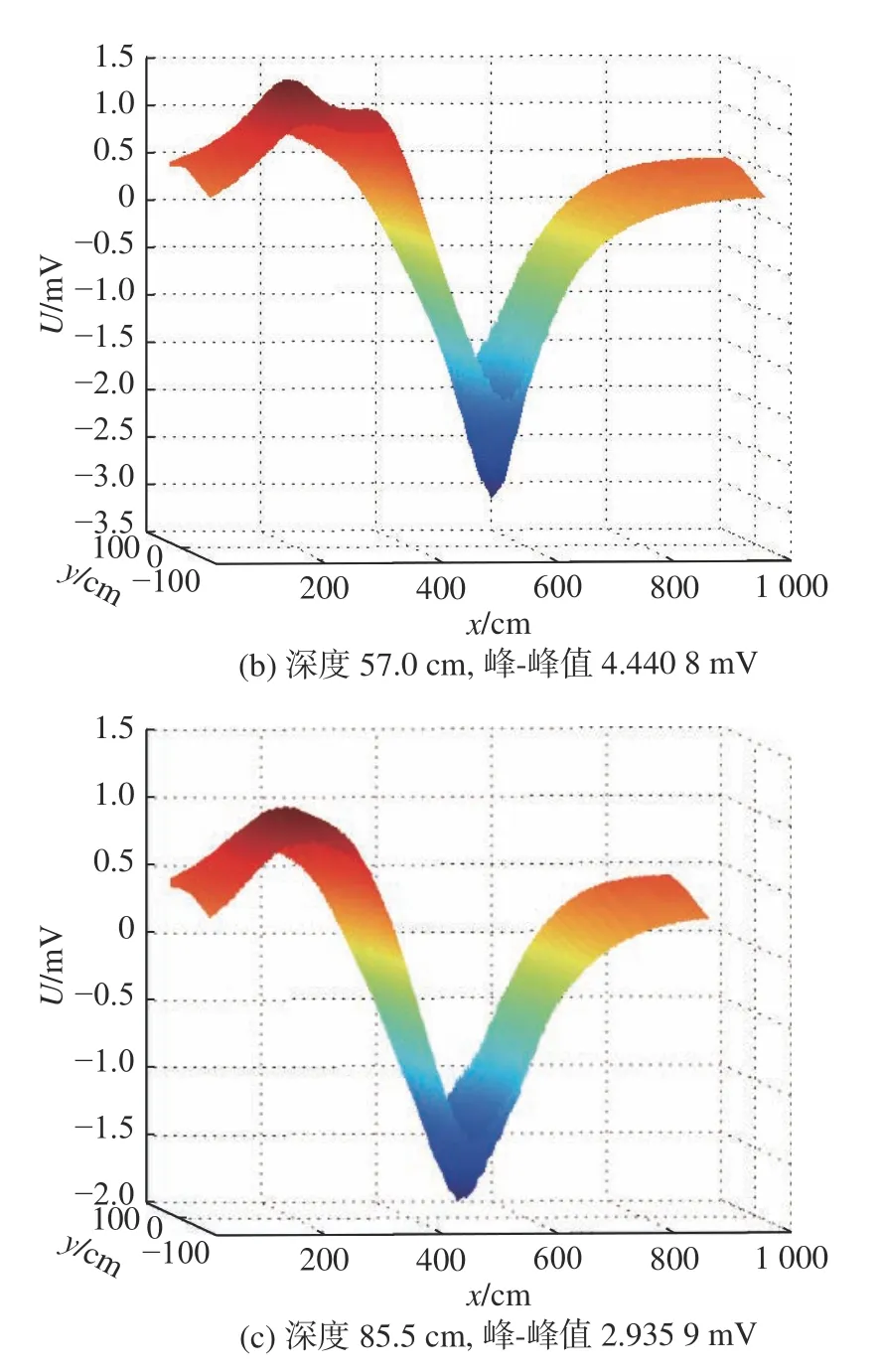
图5 不同深度平面的水下电位信号(牺牲阳极阴极保护状态)Fig.5 Underwater potential signals at different plane depths(sacrificial anode and cathode protection state)
3 海上试验
为了进一步研究舰船静态电场的特征,在某海域(水深30 m)布置一套水下电位测量阵列,该电位阵列共包含18 个电极,其中2 个为基准电极(1 个基准电极备用),16 个为测量电极,测量电极序号依次为1~16,测量电极之间的相邻距离为5 m,基准电极距离最近的测量电极90 m。16 个测量电极与基准电极信号利用双绞屏蔽电缆传输至岸上数据采集系统,系统采样频率为250 Hz,试验持续时间为140 d,期间获取了大量海洋环境及舰船电场信号。测试期间,获取了1~7 级海况条件下的海洋环境电场值,海洋环境电场时域波形有明显周期,幅值均在10~40 μV 之间,4 级海况条件下的海洋环境背景值如图6 所示。由图6 可知,不同测量点的水下电位信号存在较强的相关性。对4 级海况其中1 个测量节点600 s 时间内的电位信号计算其频谱,结果如图7 所示(图中U(f)为频率对应的信号能量的加和,由图7 可发现,海洋环境电场的频率主要集中在0.2 Hz以下频段,与海浪的频率分布一致。
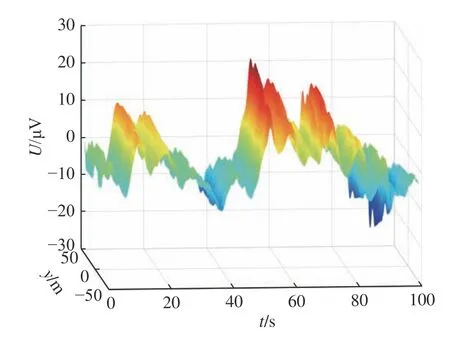
图6 海洋环境电位分布(4 级海况)Fig.6 marine environmental potential distribution(level 4 sea state)
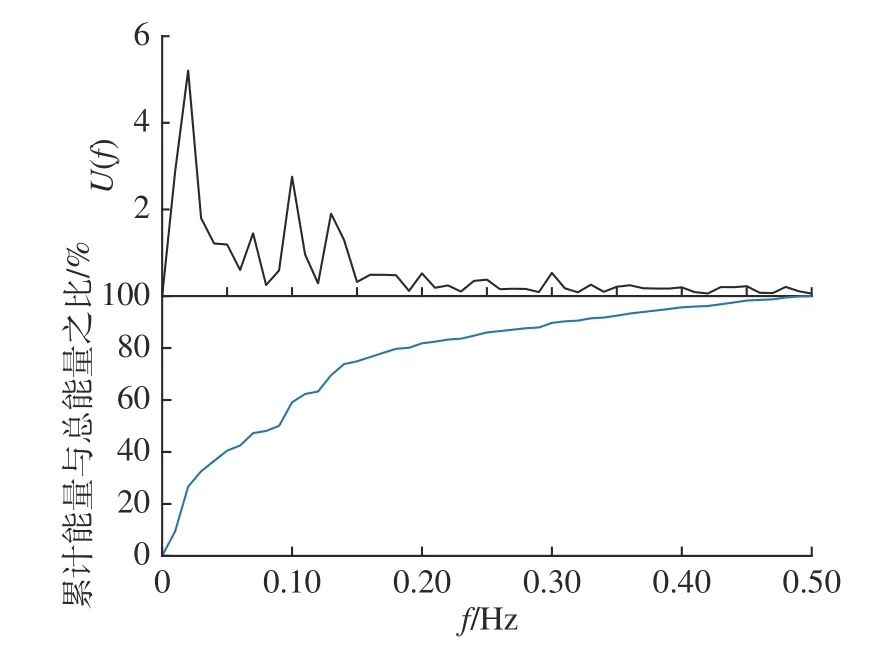
图7 海洋环境电位频谱及累计能量占比(4 级海况)Fig.7 Spectrum and cumulative energy proportion of marine environmental potential(level 4 sea state)
图8 为典型舰船通过时的水下电位信号,图中幅度进行了归一化处理。由图8 可发现,不同舰船通过时的水下电位信号通过特性明显。图8 中3 个目标的平面电位峰-峰值变化曲线如图9 所示。对图8 中得到的平面电位信号,选取峰-峰值最大的测线,计算其频谱,结果如图10 所示。由图10 可知,舰船静电场能量主要集中在0~0.1 Hz范围内。依据图10 中的结果,计算其不同频段内的累计能量与总能量的比值,结果如图11 所示。由图11 中的结果可知,舰船静电场能量主要集中在0~0.1 Hz 的频段范围内,这为以低频频段内的能量总和作为特征检测舰船静电场提供了可能和依据。

图8 典型目标水下电位分布Fig.8 Underwater potential distribution of typical targets

图9 典型目标水下电位峰-峰值变化曲线Fig.9 Underwater peak-to-peak potential curves of typical targets

图10 典型目标水下电位频谱Fig.10 Underwater potential spectrum of typical targets

图11 不同频段内累计能量与总能量比值Fig.11 Ratio of cumulative energy to total energy in different frequency bands
4 水下电位分布特征
在利用水下电位探测水下目标时,一是需重点关注水下电位随深度距离的变化趋势,以明确目标信号的幅度是否具有可测性;二是需要关注某一深度平面的水下电位横向分布特征,以明确测量电极之间的距离。
由上文分析可知,随着测量深度的增加,舰船电场可近似为偶极子场,取水平偶极子的源强度为10 A·m,依据文献[9]中的方法,对其在“空气-海水-海底”3 层介质模型中的电场分布建模计算,则海底0.5 m 以上深度平面电位幅度值随海水深度的变化曲线如图12 所示(1 dB 对应1 μV),其中,海水电导率为4 S/m,海底电导率为0.1 S/m,由图12可发现,在深度240 m 平面产生的电位幅度值为15 dB,具备可测可探的能力。

图12 10 A·m 的水平电偶极子电位幅度值随深度变化曲线Fig.12 Variation of the potential amplitude of 10 A·m horizontal electric dipole with depth
图13 为不同深度、不同正横距条件下电位幅度值随正横距的变化曲线,由图13 可知,随着测量深度的增加,同一正横距测线电位幅度值呈减小趋势,在同一深度平面,随着正横距的增加,不同测线的电位幅度值逐渐减小,为了准确探测幅度为6 dB 的水下电位信号,在保证6 dB 信噪比条件下,将检测门限设定为12 dB,则在240 m 以浅深度,相邻传感器之间的距离不大于320 m 时,传感器阵列才能准确探测水面等效源强度为10 A·m 的舰船电场,并实现对局部航行区域的警戒封锁。
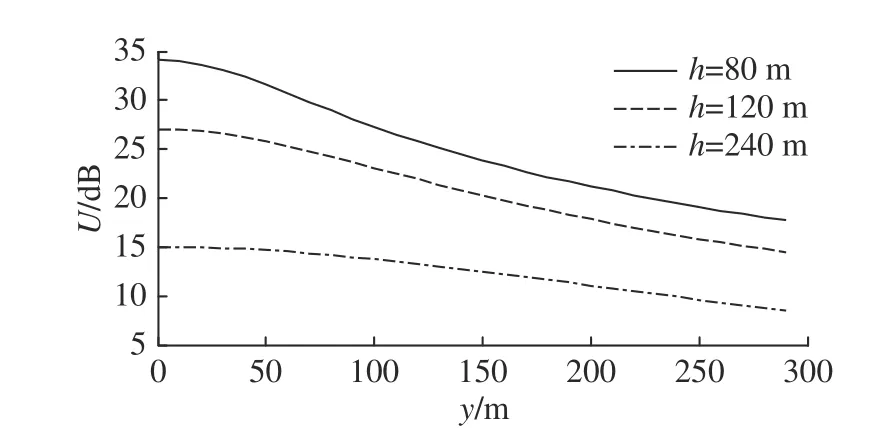
图13 不同正横距条件下电位幅度值随正横距变化曲线Fig.13 Variation of potential amplitude with different positive transverse distances
5 结束语
为全面掌握舰船静电场信号特征,在电场测量阵列的测量基础上,对船模试验和实船试验结果中的舰船静电场水下电位信号进行特征分析。研究结果表明,阴极保护系统对舰船水下静电场信号的量级影响较大,舰船在通过电位测量阵列时,静电场信号有明显的时域和频域特征,从频域上看能量主要集中在0~0.1 Hz 频段,且在240 m 以浅深度,相邻传感器间距不大于320 m 时,传感器阵列才能准确探测水面等效源强度为10 A·m 的舰船电场。下一步可在水下电位分布特征的分析结果基础上,对测量阵列在海洋环境中的静电场探测距离进行验证。
