基于多传感器融合的定位技术概述*
2023-08-28朱洪达
朱洪达 ,罗 强 ,辛 琪
(重庆三峡学院机械工程学院,重庆 404100)
随着社会的进步和科技的发展,定位技术已经渗透到了人们生活的方方面面,无论是自动驾驶、无人机、语音聊天等领域,还是交通、旅游、工业生产、紧急救援等领域,都离不开定位技术。定位技术分为室外定位和室内定位两类,但都无法实现室内外无缝连续定位。室内定位存在应用范围的限制,以移动网络定位技术为例,在室外时,受到不同环境的影响,如在隧道、山顶等信号不好的地方,不能实现高精度定位;室外定位由于卫星信号不能穿透障碍物,所以室内定位也无法使用GNSS 技术或者GPS 技术[1]。如何实现室内外的连续定位成为导航定位领域的研究热点,也是未来定位发展的趋势。近年来,多传感器融合的定位技术实现了室内外无缝的连续定位,也成为当下导航定位领域的主流定位方式。本研究列举了几种具有代表性的多传感器融合定位方法,并对比了其中三种定位技术的优缺点。在此基础上,探讨了定位技术的发展趋势,提出了多传感器融合定位技术的优化方向。
1 多传感器融合定位技术
目前常用的多传感器融合定位技术包括GNSS/IMU传感器融合、GPS/INS/磁力计传感器融合、里程计/LiDAR/GNSS传感器融合。三类多传感器融合定位技术的相关技术特点如表1所示,随着更多传感器的组合定位,其定位精度越高,但是定位成本也逐渐增大,并且多传感器的组合定位普遍存在着室内外信号源不能平稳切换的问题,束缚了定位精度的进一步提高。多传感器的组合定位是大势所趋,未来会有更多类别的传感器应用在导航定位领域,不断提高无缝定位的精度和完整度。通过对比三类传感器融合定位技术发现,里程计/LiDAR/GNSS传感器融合定位技术定位精度高。
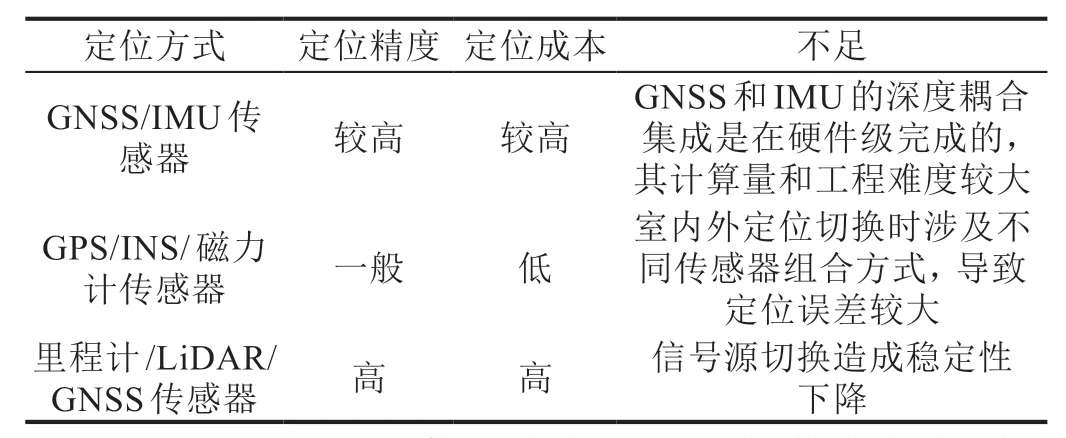
表1 三类传感器融合定位技术对比
1.1 GNSS/IMU传感器融合定位技术
GNSS 和IMU 是目前比较流行的定位技术和航位推算系统相辅相成的导航传感器。GNSS 只要用4颗卫星建立瞄准线(LOS)就能提供准确的位置和速度信息,但受信号中断、信号干扰和多径效应影响,这种精度可能会降低。IMU 具有高频更新测量平台方向的优势,并且不受环境条件的影响,但漂移效应会导致测量误差累积。一些研究已经证明了两种传感器在扩展卡尔曼滤波器(EKF)方面的融合,为了提高传感器融合性能,可以采用预处理GNSS 和IMU数据进行融合。
GNSS/IMU 传感器融合用于定位技术的优势:GNSS 具有长期高精度的特点,可以补偿IMU 的快速误差漂移。同时,IMU 测量可以为组合导航系统提供高速率速度和姿态,并可在GNSS 测量不可用时进行航位推算,获得短期定位解决方案。近年来,GNSS/IMU 集成技术得到了广泛的发展,如通过添加磁传感器、里程计、光探测与测距(LiDAR)或摄像机等辅助传感器,以改进集成算法。在低成本GNSS和IMU 传感器的研究中,通常以集成算法的改进,来获得无需额外传感器的最优导航解决方案。
1.2 GPS/INS/磁力计传感器融合定位技术
此类定位技术通过采用GPS、INS 和磁力计三类传感器进行有机融合,实现了室内外的无缝连续定位。当外部环境进行室内外切换时,如何平稳进行信号的转换成为关键,该定位技术运用卡尔曼滤波器对GPS 和INS 的组合信号进行滤波[2];在室内环境中,通过INS 传感器和磁力计的相互配合,采集得到运动学数据,包括航向角和加速度等信息,并借助轨迹推算法进行高精度的定位。
该定位技术优点:可以实现较高精度的定位,通过比对相关实验测试数据,发现三类传感器的综合定位方式优于任意单传感器定位和任意两类传感器融合定位。在定位精度方面,该方法提高了定位技术的核心功能,拓宽了多传感器融合定位的研究思路。该定位技术缺点:磁力计的不稳定性使得磁力计测量的航向角数据不够准确,容易受到外部环境的干扰,这就使得必须对航向角进行修正,对相关算法的改进优化提出了要求,增加了研究难度。只要涉及室内外切换,必然会考虑过渡点的自动切换问题,使得过渡点附近的定位信号精度不高,这也是所有多传感器融合定位技术的技术难点,只有掌握了室内外无缝定位的平滑过渡方法,才能实现真正的高精度无缝定位。
1.3 里程计/LiDAR/GNSS传感器融合定位技术
该定位技术采用了三类传感器进行融合定位,其创新点在于采用了扩展卡尔曼滤波算法来提高室内外的连续定位精度。在室内环境中,LiDAR 信标定位算法不仅可以准确计算定位数据,而且还可以实时更新量测方程和卡尔曼增益系数,对系统做出新的姿态最优估计,并以此作为下一时刻系统方程的初始位置,循环迭代,不断更新定位数据,实现连续定位[3];在室外环境中,GNSS 可以获得定位数据并计算量测方程,以此为基础数据,获得传感器的协方差矩阵,从而计算出卡尔曼增益系数,对系统的位姿估计进行实时更新。
这种定位技术在定位精度和定位稳定性上都有了明显的提高,并创新性地提出了一种室内外信号源平滑滤波算法[3],较好地解决了过渡点的信号切换问题,然而由于传感器数量的增加,会导致室内外定位切换时不同传感器之间的平稳过渡存在误差,需要进一步对算法进行优化,这既是定位领域后续的研究重点,也是定位精度提升的潜在空间。
2 多传感器定位技术发展趋势
目前主流的定位方法是根据场景的具体需求和各类传感器的技术特点,融合各种传感器的优势,实现在各种复杂环境下,对目标位置做出高精度的最优估计。除了GNSS/IMU 传感器融合、GPS/INS/磁力计传感器融合、里程计/LiDAR/GNSS 传感器融合三种多传感器融合定位技术之外,还有许多不同的融合定位方法,如刘家宏等[4]使用GPS 与WiFi 融合进行室内外定位,能够实现95%综合场景定位误差低于2.5 m;关维国等[5]应用北斗伪距差分与WiFi 融合室内外定位,融合定位平均均方根误差为1.963 m,其精度可满足一般民用需要。在智能化、网联化、微型化发展潮流下,传感器技术的升级具有了深厚基础,传感器的集成化趋势正日趋凸显,更多高精度传感器的融合组合是现代多传感器定位技术的发展趋势,将高精度定位技术与北斗进行融合是当今时代的风向标[6]。因此,将北斗系统融入到导航定位领域是大势所趋,也是科研者的心之所向。
3 优化方向
只要涉及多传感器的组合定位,就会存在室内外信号源如何平滑切换的问题,这也是该领域在未来发展中需要解决的核心问题。无论是从定位算法方面进行改进,还是从传感器接收机的性能方面进行提升,都是多传感器融合定位技术的优化方向,也是实现更高定位精度的必由之路。以里程计/LiDAR/GNSS 传感器融合定位技术为例,对其进行优化,主要分为两个方面,一是如何实现室内外无缝定位的平滑过渡,二是如何提高定位精度。
3.1 室内外无缝定位平滑过渡优化
在进行导航定位时,避免不了室内外的切换。从室外环境进入室内环境时,在过渡点附近由于靠近建筑物,使得卫星信号不能很好地被接收到,即使接收到信号也可能失真,直接导致GNSS 系统产生较大的误差,几何精度因子(GDOP)会逐渐增大,GNSS 系统接收到的卫星数会逐渐减少[3];而当人们从室内环境进入室外环境时,在过渡点周围接收到的卫星信号十分微弱,GNSS 定位方法在此处无法正常工作,继续往外走,系统接收到越来越多的卫星信号,GDOP值逐渐减小,同样导致了定位误差的增大。
本研究为了保证信号源在室内外定位切换时保持平滑稳定,提出了一种优化方法[7-10],即通过找到室内外定位精度临界点的GDOP 值,以此最优转化范围值为阈值,进行信号的平稳切换。当人们从室外走向室内时,GDOP值会逐渐增大,当GDOP值增加到阈值范围时自动切换定位方式,这样的平滑过渡方法可以大大提高系统的定位精度。具体切换方式如图1所示。
3.2 定位精度优化
高定位精度是核心的导航服务性能需求,提高定位精度也是定位技术优化的关键。除了选择更加优化的算法来实现高精度的定位之外,还可以设计高效的信息融合方案,以提高系统的定位性能。比如以高精度或高可靠性的定位源为基准,采用紧耦合的方式融合其他定位源以获得位置的最优估计。此外,还可以选择目前市场上最新的高精度定位测向终端产品,比如P3-DU北斗高精度定位测向接收机,它不仅可以支持北斗单系统独立定位测向和多系统联合定位测向,还能够提供厘米级RTK 定位精度和毫米级载波相位观测值,可以应用于交通、农林、电力、金融等领域。
4 结语
多传感器融合的定位技术在5G 时代有着举足轻重的作用,如何将定位技术与更多数字化和智能化的传感器进行有机结合,是目前学术界和工业领域的研究趋势。本研究概述了三类多传感器融合的定位技术,归纳总结了三类传感器组合定位的技术特点以及定位技术的发展趋势,分析了当前多传感器融合定位技术的优化方向,即室内外无缝定位平滑过渡优化和高精度优化。
