基于逆雅可比矩阵的三转动弱耦合并联机构构型综合
2023-08-22牛云展李富娟徐继龙李仕华
牛云展 李富娟 徐继龙 李仕华
(1.燕山大学河北省并联机器人与机电系统重点实验室, 秦皇岛 066004;2.燕山大学机械工程学院, 秦皇岛 066004; 3.燕山大学电气工程学院, 秦皇岛 066004)
0 引言
三转动并联机构可实现绕空间任意轴线的转动,且具有稳定性好、承载能力强、精度高等显著优点,被广泛应用于关节仿生[1-3]、康复医疗[4-6]、航空航天[7-9]、舰载模拟[10]等领域。
球面并联机构作为三转动并联机构的典型代表,已被国内外诸多学者加以研究[11-13]。近年来,随着并联机构在工程上的逐步应用,不同种类的三转动并联机构被相继提出。ZUO等[14]提出一种用于人体踝关节康复的三转动并联机构2-UPS/RRR。CARBONARI等[15-16]提出一种具有可重构功能的三自由度并联机构,该机构可通过锁定运动副来实现转动运动。SUN等[17]提出一种用于大型机身/机翼加工和装调的定位机构3-PUS/S。以上研究所涉及的三转动并联机构往往具有强耦合性,这类机构虽具有良好的承载能力,但其在结构设计、装配、运动学分析以及控制等方面存在诸多困难,一定程度上影响了其应用范围和使用效果。
为解决这一问题,国内外学者对三转动解耦并联机构开展了大量研究工作。GOGU[18]基于线性变换理论对三转动解耦并联机构进行了综合,得到了若干三转动解耦并联机构。ZHANG等[19]基于机构雅可比矩阵的物理含义和支链驱动原理,综合出全R副的3R全局各向同性转动并联机构并对之进行了运动分析。魏俊等[20]对完全解耦的可重构踝关节康复并联机构进行了构型综合,此类机构具有3个转动自由度。ZENG等[21]以螺旋理论为基础,提出了并联机构的转动解耦条件,阐述了分支输入副的选择准则,确立了分支运动副的配置原则,进而提出转动解耦并联机构构型综合理论。此外,曾达幸等[22]根据机构运动与分支运动之间的关系,提出一种新型广义解耦并联机构型综合方法,并对三转动广义解耦并联机构进行型综合,得到了大量三转动广义解耦并联机构构型。
从承载能力和控制复杂程度两方面来看,强耦合并联机构和解耦并联机构互为对立,这两类机构很难同时兼有承载能力大和控制容易的优点。为此,介于强耦合并联机构与解耦并联机构之间的弱耦合并联机构,逐渐受到学者们的关注[23-26],但目前关于三转动弱耦合并联机构的构型综合尚缺乏研究。
本文通过分析逆雅可比矩阵中奇异向量的含义,得到三转动并联机构具有运动弱耦合特性的条件;根据逆雅可比矩阵的螺旋表达形式,推断各支链中驱动力螺旋需满足的空间几何条件;进一步,根据驱动力螺旋与被动副运动螺旋之间的数值关系,得到支链中运动副的类型和布置条件,进而对支链类型进行综合;最后,制定支链的选择方法及原则,对三转动弱耦合并联机构进行构型综合,并得到多种新型并联机构。
1 三转动并联机构弱耦合条件分析
1.1 逆雅可比矩阵中奇异向量
对于三转动并联机构,其逆雅可比矩阵表示动平台角速度与驱动副速度的映射关系,其表达式为
(1)
式中AC——逆雅可比矩阵
ω——动平台角速度
对于非冗余驱动的三转动并联机构,其逆雅可比矩阵AC∈R3×3。根据矩阵奇异值分解可知,对于任意的AC,存在酉矩阵UC∈R3×3、VC∈R3×3和半正定对角阵ΣC∈R3×3,存在
(2)
令zi、μi、bi(i=1,2,3)分别表示AC的左奇异向量、奇异值、右奇异向量,且下角标相同的奇异向量和奇异值一一对应,则式(2)可表示为
(3)
当ω=bi时,将式(3)代入式(1)可得
(4)
由式(4)可知,在机构学中,右奇异向量bi可表示动平台单位角速度矢量,左奇异向量zi可表示与bi对应的驱动副的单位速度矢量,奇异值μi可表示与bi对应的驱动副速度矢量的模。
1.2 三转动弱耦合机构中奇异向量
根据奇异向量的含义可知,右奇异向量bi的表达形式由所选坐标系决定,左奇异向量zi的表达形式由工作电机的个数及各电机驱动速度的比值决定。根据酉矩阵定义可知,左奇异向量b1、b2和b3为单位向量且相互正交,故可将b1、b2、b3定义为3个输出变量的轴线方向,此时,可根据zi中所含元素个数评判机构的运动耦合性强弱。
由于z1、z2和z3为单位向量且相互正交,可得到三转动并联机构具有运动弱耦合特性的条件为:
(1)ze和zf(e=1,2,3;f=1,2,3;e≠f)均为含有1个零元素的向量,且ze和zf中零元素的位置相同。
(2)zg(g=1,2,3;g≠e;g≠f)中仅含有一个非零元素,该非零元素的位置与ze中零元素位置相同。
(3)ze和zf对应的奇异值需满足μe≠μf。此条件的原因在于:当奇异值存在n个重根时,其对应的左奇异向量基础解系个数为n,若μe=μf,则存在一组解为ze和zf均只含有一个非零元素,此时,机构具有解耦特性。
1.3 各支链驱动力螺旋的空间几何关系
令$aj表示支链j(j=1,2,3)的驱动力螺旋,其表达式为
(5)
式中Sj——$aj的原部,用于确定$aj的轴线方向
根据文献[27]可知,当坐标系原点与转动中心重合时,三转动并联机构的逆雅可比矩阵AC的螺旋表达形式为
(6)
式中 $j——支链j中驱动副的运动螺旋
联立式(3)、(6)可得
(7)


2 三转动弱耦合并联机构构型综合
三转动弱耦合并联机构构型综合流程为:
(1)构造机构的逆雅可比矩阵。由于机构在某一方向上的运动耦合性与其在该方向上的承载能力成正相关,故可根据机构不同方向承载力需求,构造逆雅可比矩阵的左奇异向量zi和右奇异向量bi。进而,通过奇异值分解的逆运算,求解逆雅可比矩阵AC。
(2)确定驱动力螺旋的空间几何条件。分析逆雅可比矩阵AC中各行向量之间的位置关系,判定各支链中驱动力螺旋需满足的空间几何条件。
(3)综合支链类型。支链中驱动力螺旋满足如下关系:①驱动力螺旋与被动副运动螺旋的互易积为零。②驱动力线矢与约束力线矢垂直。根据上述条件,对支链类型进行综合。
(4)综合机构构型。对综合得到的支链进行选择和布置,构建并联机构并验证其自由度,进而完成三转动弱耦合并联机构的构型综合。
绘制综合流程图如图1所示。
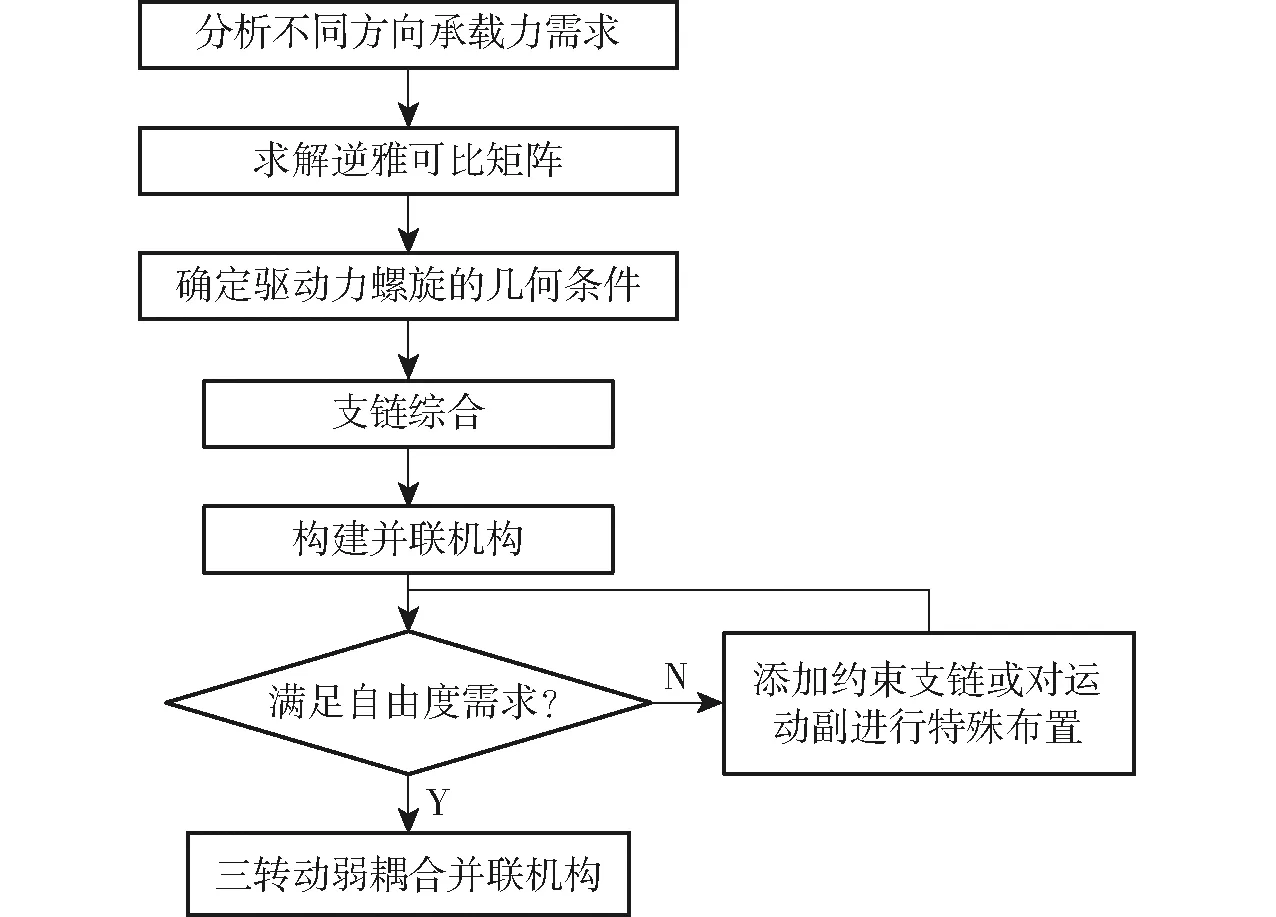
图1 三转动弱耦合并联机构构型综合流程图Fig.1 Flow chart of weakly-coupled three-rotational PM
2.1 机构逆雅可比矩阵构造
假设,机构在x轴和y轴方向上需要较大的承载能力,其在z轴方向上需要较小的承载能力。则动平台在绕x轴和y轴方向转动时,设计两条主动支链进行驱动;动平台在绕z轴方向转动时,设计一条主动支链进行驱动。根据上述分析,对zi和bi进行构造,构造结果为
其中
将上述数据代入式(3),可得机构逆雅可比矩阵AC的表达式为
(8)
2.2 各支链中驱动力螺旋的空间几何条件


(9)

根据上述分析,分别绘制支链1、支链2和支链3的驱动力螺旋,如图2所示。

图2 各支链的驱动力螺旋Fig.2 Transmission wrench screw of branch chain
在进行运动学分析时,机构的输出速度既可以用绕定坐标系各轴的转动角速度表示,也可以用绕动坐标系各轴的转动角速度表示。因此,图2中坐标系既可以是定坐标系,也可以是动坐标系。
2.3 支链1和支链2类型综合

(1)驱动力螺旋为力偶
根据机构自由度条件可知,支链1和支链2均至少拥有3个转动自由度。

(2)驱动力螺旋为力线矢



根据上述分析及驱动力线矢与运动副位置关系可知,支链1和支链2需满足条件:①支链应具有6个自由度。②支链中至少存在2个被动转动副轴线相交,且交点位置相对定平台或动平台保持不变。③支链中其他被动转动副的轴线方向相同,且不平行于z轴,同时这些转动副的轴线方向与被动移动副的运动方向垂直。④支链中存在3个不同方向的被动转动副,且这3个方向向量线性无关。
根据上述分析,对支链1和支链2的类型进行综合。当支链中驱动副为非机架副时,机构具有较大的转动惯量,致使其动态性能变差,为此,本文主要对驱动副为机架副的支链进行综合,综合结果见表1。

表1 支链1和支链2的类型综合结果Tab.1 Type synthesis of branch chain 1 and branch chain 2
2.4 支链3类型综合
(1)驱动力螺旋为力偶

(2)驱动力螺旋为力线矢

根据上述分析,对驱动副为机架副的支链3的类型进行综合,结果见表2。
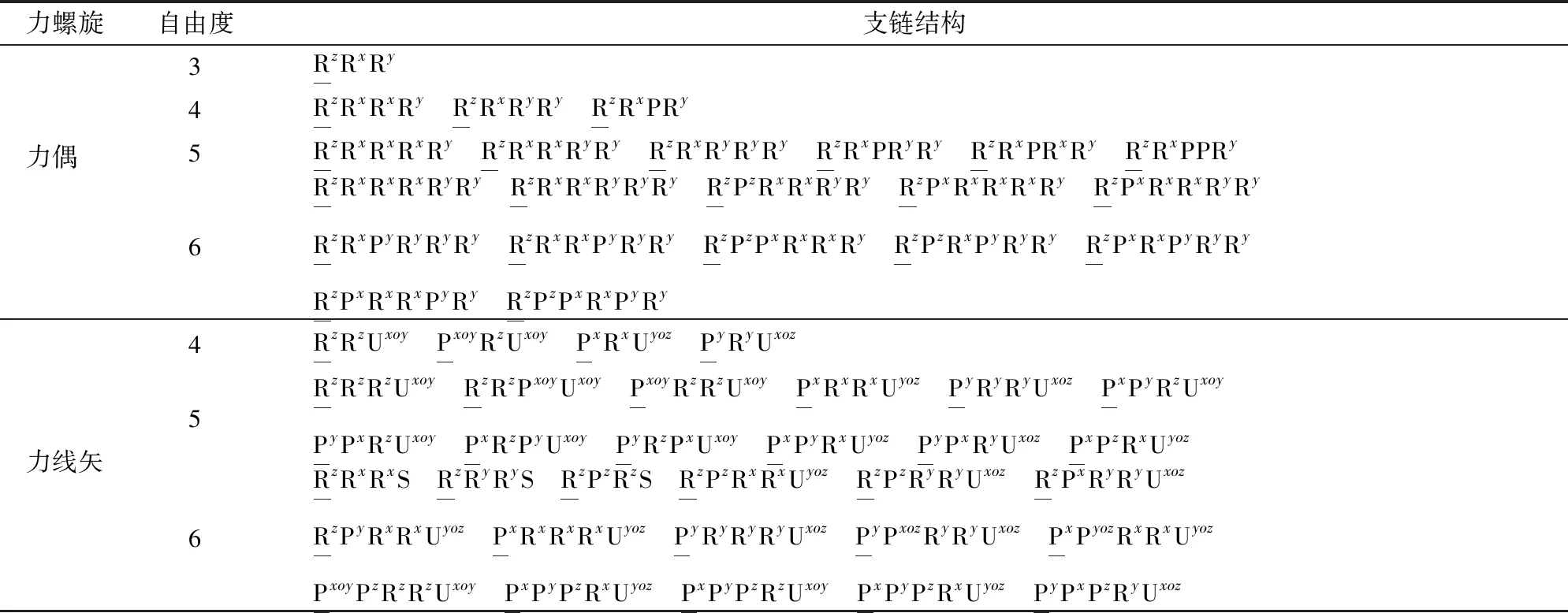
表2 支链3类型综合结果Tab.2 Type synthesis of branch chain 3
2.5 机构构型综合
根据支链驱动力螺旋类型、对应的坐标系及支链的自由度,制定机构构型设计方法:

(2)根据表2,选取1条支链作为支链3。

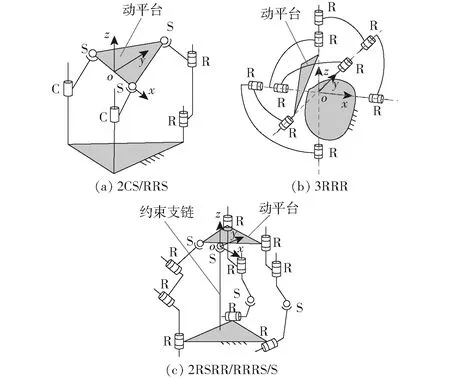
图3 三转动弱耦合并联机构Fig.3 Weakly-coupled three-rotational PMs
3 综合实例
3.1 实例1


图4 2CRS/RU的坐标系统Fig.4 Coordinate system of 2CRS/RU

令d1、d2和θ分别表示支链1、支链2和支链3的输入变量;α、β和γ分别表示动平台绕动坐标系中x轴、y轴和z轴的转动角。选用z-y-x型欧拉角描述动平台的姿态,则oxyz相对于OXYZ的旋转变换矩阵R为
R=Rz(γ)Ry(β)Rx(α)=
(10)
其中c表示cos;s表示sin。
当动平台姿态变化后,点Ak在OXYZ中的坐标为
OAk=RoAk
(11)
由支链k结构可知,其球副中心在Z轴方向的坐标等于输入变量dk;由支链3结构可知,γ=θ;结合式(10)和式(11)可得
(12)
3.2 实例2
选取图3a中2CS/RRS并联机构作为案例2,建立机构的坐标系,如图5所示。图中Ak表示支链k中球副的转动中心;Bk表示支链k中滑块的中心;B3表示支链3中第1个转动副的中心;o表示支链3中球副的转动中心。在点o分别建立定坐标系OXYZ和动坐标系oxyz,其中,x轴平行于A1A2,z轴垂直于动平台,y轴过线段A1A2的中点。

图5 2CS/RRS的坐标系统Fig.5 Coordinate system of 2CS/RRS

由支链1和支链2的结构可知,任意时刻下,向量AkBk和OB3在OXYZ中沿Z轴方向的坐标保持不变。令d1、d2和θ分别表示支链1、支链2和支链3的输入变量,则向量A1A2和A1O沿Z轴方向的分量ZA1A2和ZA1O为
(13)
令α、β和γ分别表示动平台绕x、y和z轴的转动角度。选用与案例1相同类型的欧拉角,则oxyz相对于OXYZ的旋转变换矩阵为R。采用欧拉角形式求得ZA1A2和ZA1O的表达式为
(14)
式中R(3,:)——R中第3行的行向量
联立式(10)、(13)、(14)求得
(15)
进一步,经公式推导求得θ的表达式中含有变量α、β和γ。由于θ与各杆件的长度、支链的安装位置等参数均有关,其推导过程及表达式较为复杂,故此处未列出。
综上分析可知,2CS/RRS机构具有运动弱耦合特性。
3.3 实例3


图6 2RSRR/RU的坐标系统Fig.6 Coordinate system of 2RSRR/RU

令θ1、θ2和θ3分别表示支链1、支链2和支链3的输入变量,α、β和γ分别表示动平台绕x、y和z轴的转动角度。选用z-x-y型欧拉角描述动平台的姿态,则oxyz相对于OXYZ的旋转变换矩阵R1为

(16)
由支链3结构可知,θ3=γ。任意姿态下,Ak在OXYZ中的坐标OAk为
OAk=R1oAk
(17)
由支链k结构可知,向量AkBk沿z轴方向的分量保持不变,其值定义为l。在OXYZ中,点Bk沿Z轴方向的分量ZBk的表达式为
ZBk=R1(3,:)oAk-lR1(3,3)
(18)
式中R1(3,3)——R1中第3行第3列的元素
令h表示点Ck沿Z方向的分量,lk表示CkBk的长度。用输入变量θk表示ZBk,其表达式为
ZBk=h+lksθk
(19)
联立式(18)和式(19)求得
(20)
其中
g1=bsα-acαsβ-h
由式(20)可知,该机构为弱耦合机构。通过上述3个实例分析,可验证本文所提方法的正确性和有效性。案例1和案例3具有固定的转动中心,其运动学正解简单,控制容易,且其绕x、y轴方向具有较好的承载能力,在踝关节康复方面具有良好的应用前景。案例2通过合理的结构设计,可实现大范围转动,应用于具有大转角需求的领域。
4 结论
(1)通过分析逆雅可比矩阵中奇异向量的含义,将奇异向量与机构的运动耦合性建立了联系,并根据逆雅可比矩阵的螺旋表达形式,得到了三转动弱耦合并联机构中驱动力螺旋需满足的空间几何条件。
(2)基于驱动力螺旋与支链中运动副的位置关系及驱动力螺旋与约束力螺旋的位置关系,提出一种三转动弱耦合并联机构的构型综合新方法,该方法中机构的输出变量既可以是绕定坐标系各轴的转动角度,也可以是绕动坐标系各轴的转动角度。
(3)利用所提方法对三转动弱耦合并联机构进行了综合,得到了一系列驱动副为机架副的三转动弱耦合并联机构,并通过案例验证了所提方法的正确性。
