基于无人机点云数据的河流DEM创建研究
2023-08-01刘欣
刘欣

摘要:河流地區的地理空间信息对于河流管理(如河流规划,洪水分析和泥沙负荷分析)至关重要。无人机(Unmanned Aerial Vehicle,UAV)技术已广泛应用于获取三维地形,其直接获取的是数字表面模型(Digital Surface Model,DSM),包括地表植被、建(构)筑物等地物的高程信息。该文以北京市内某河流为工程背景,使用区域增长算法,基于无人机获取的点云数据提取地面点,创建区域数字高程模型(Digital Elevation Model,DEM),并使用虚拟参考站(Virtual Reference Station,VRS)和全站仪量测检测点坐标,检验所获取DEM的精度,验证基于无人机点云数据创建DEM的有效性。因此,可以通过应用基于区域增长算法的无人机点云来生成DEM,并将其有效地用于河流管理中。
关键词:无人机 点云 区域增长法 河流地形数据
中图分类号:P332;P23 文献标识码:A
Research on the Creation of the River DEM Based on UAV Point Cloud Data
LIU Xin
(AVIC Institute of Geotechical Engineering Co., Ltd., Beijing, 440001 China)
Abstract: The geospatial information of river areas is critical for river management (such as river planning, flood analysis and sediment load analysis). Unmanned aerial vehicle (UAV) technology has been widely used to obtain 3D terrain, and it directs acquires the digital surface model (DSM), including the elevation information of ground objects, such as surface vegetation, buildings (structures), etc. This paper takes a river in Beijing as the engineering background, uses the regional growth algorithm to extract ground points from the point cloud data obtained by UAV and create the digital elevation model (DEM), and uses the virtual reference station (VRS) and total station to measure the coordinates of detection points, test the accuracy of the obtained DEM, and verify the effectiveness of creating the DEM based on UAV point cloud data. Therefore, the DEM can be generated by applying UAV point clouds based on the regional growth algorithm, and it will be effectively used in river management.
Key Words: UAV; Point cloud; Region growing method; River terrain data
河流周围地区的4D产品对于河流的综合管理至关重要,可以用于限制河流环境内的过度开发和执行灾害管理任务[1]。很多研究一直在利用地形数据进行河流管理任务,如用于制订基本的河流维护计划、水利设施安装、洪水分析和泥沙排放分析等[2]。
与传统测图方法相比,无人机摄影测量可获取地表地物4D产品,获取的信息更全面。近年来,基于无人机(Unmanned Aerial Vehicle,UAV)创建三维地形数据得到了广泛应用。无人机配备有全球卫星导航系统(Global Navigation Satellite System,GNSS)和惯性导航系统(Inertial Navigation System,INS),用于获取位置信息的传感器以及用于捕获影像的摄像头。此外,一些项目中已经使用了能够进行虚拟参考站(Virtual Reference Station,VRS)调查的无人机设备,从而可以更快地进行地形建模[3]。
基于无人机获取三维地形的研究大多都集中在应急防灾、城市规划、林业和农业上,这些应用中获取的地形数据为包括所有地形特征的数字表面模型(DigitalSurface Model,DSM)影像。用于基本河流维护计划开发、洪水建模和沉积物流量分析要使用数字高程模型(Digital Elevation Model,DEM)数据,需要从无人机采集的DSM数据中消除植被等地物特征[4]。
基于无人机点云数据获取DSM,应用区域增长法创建DEM,选择位于北京市某河流的一部分作为试验区域,基于地面实测数据评估DSM和DEM数据的高程精度,验证了基于无人机点云数据创建DEM的可靠性。
1点云数据获取
试验区域为北京的某条河流,选择eBee(SenseFly,瑞士洛桑)作为获取河流地形数据的无人机设备,该设备单次飞行的最大飞行时间为50 min,最大覆盖范围约为12 km2,搭载WX220(索尼)相机,焦距为4~25 mm[5]。
路线规划采用eMotion软件设计。无人机飞行高度195 m(分辨率为6 cm),横向和纵向重叠分别设置为70%和85%。一次飞行可以捕获大约1 km2的区域。
总共获取了目标区域的391张图像。使用eMotion软件包的“飞行数据管理器”功能进行地理标签处理,将位置信息(例如GNSS和INS信息)与每个图像文件相关联,使用Pix4D软件进行图像镶嵌处理。
2 DSM创建
基于Pix4D软件。可以使用“rayCloud”技术来提高图像中的三维点云数据以及GPS和INS信息的准确性,该技术最终可创建具有高可靠性的DSM数据[6],如图1所示。具体流程如下。
(1)输入立体像对。将垂直获得的影像作为左视图,非垂直方向获得的影像作为右视图,同时输入影像的RPC文件。
(2)定义地面控制点。Pix4D提供了无控制点、交互式选择控制点及从外部文件中读取控制点3种选择。本文中选择无控制点,生成相对高程的DSM。
(3)定义连接点。基于区域灰度匹配法自动寻找重叠区的连接点;设置连接点数目、搜索窗口大小、移动窗口大小;通过交互式窗口检查连接点效果并调整参数,直到取得满意的效果。
(4)设定输出参数。设定输出DSM的投影参数、像元大小和范围、最小相关系数阈值、背景值、数据输出类型等。
(5)输出DSM及检查结果。将产生的DSM显示在窗口中,并激活编辑工具。
(6)编辑DSM。对生成的DSM进行中值滤波处理,设定3×3的卷积核。同时对结果进行人工检查,消除明显的异常值。
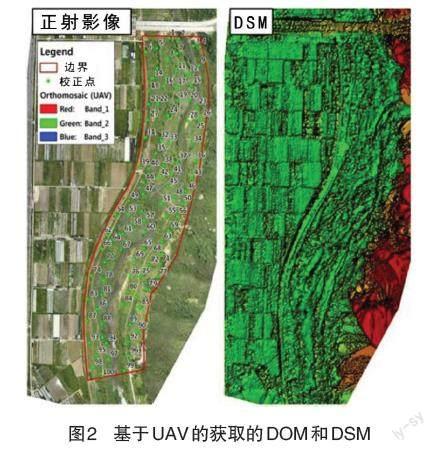
图2显示了由Pix4D软件创建的数字正射(Digital Orthophoto Map,DOM)影像和DSM影像。作为参考,在DOM中还显示了用于评估河流地形数据准确性的边界点和验证点。
3 DEM创建
由于使用无人机创建的DSM数据包括河流中的植被,河流调查需要使用剔除植被等地物后生成的DEM数据。图3显示了河流一部分的三维模型,该模型是使用DSM创建的。
传统的点云数据处理方法大都采用局部最大值方法提取树木或建筑物[7]。该方法需要事先获取与目标树木或建筑物位于同一地面上的最大树木或建筑物的大小,对于阔叶林较多的地区,采用局部最大值方法通常会在同一树冠中检测到多个局部最大值点,易降低树冠提取的准确率。因此,选择采用基于坡度的滤波算法来提取地面点,并使用区域增长方法来创建DEM。
基于坡度的滤波算法基本思想是:点云数据地面点和地物点之间的坡度大于地面点与周围地面点形成的坡度值。在一定范围内,相邻的两点高程差越大,两点引起的地形变化就越大。算法的滤波精度与所给的阈值有关,而地形数据的完整性与范围窗口有关。不同的地形数据需要使用不同的坡度值参数进行滤波计算。
区域增长是点云数据分割最常釆用的方式。在属性空间中,面向不同的处理对象,借助高差、坡度、法向量、与原点距离、邻域拟合曲面的残差等特征,进行区域增长,形成一系列的目标表面;然后,在目标空间中,进行拓扑分析,对目标表面进融合、分裂和分类,最终得到模型重建所需面数据;最后,完成模型重建。为了使用点云数据对河流中的树木进行分类,首先将这些点分为非地面点和地面点,点云数据同时显示水平位置(x,y)和垂直位置(z)。搜索位于特定点云周围的点后,根据各个点之间的坡度差异对地面和植被进行分类。因植被高程明显高于地面,所以如果各点云之间的坡度较大,则表示是植被,但如果用于计算的像元面积太大,则树可能被误分类为地面,为了解决此问题,可基于目标区域中的树冠面积或地形特征来设置窗口大小。
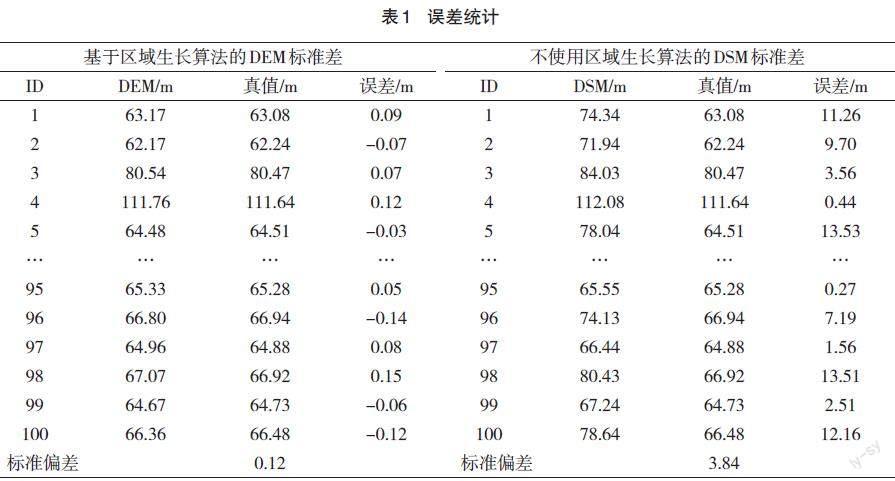
图4(a)显示了基于无人机的DSM影像。图4(b)显示了通过基于点云数据的区域增长法创建的DEM。计算了100个检查点的高程误差。(如表1所示),DSM的高程值的计算误差范围为0.08~15.33 m,标准差为±3.84 m。另一方面,评估显示,DEM的高程误差范围为-0.27~0.41 m,标准差为±0.12 m。
4 结语
在该研究中,基于从无人机摄影测量获得的点云数据,应用坡度技术创建了可用于河流管理任务的地形数据。该研究通过使用VRS和全站仪调查得出了100个测试点的真实值,并将这些测试点用于计算DSM和DEM的高程精度结果表明,DSM和DEM数据的标准差分别为±3.84 m和±0.12 m。因此,通过基于无人机点云数据的坡度技术分析的DEM数据可以有效地用作河流管理任务的地形数据,如基本河道维护计划的建立、洪水模型和沉积物排放评估等。
参考文献
- 程飛,张子文,姜炳功.无人机倾斜摄影测量在河流综合治理中的应用[J].测绘与空间地理信息,2022,45(6):58-60,66.
- 邓烨.基于无人机点云数据的道路标志提取与规则化[D].合肥:安徽理工大学,2021.
- 王明,李丽慧,廖小辉,等.基于无人机航摄的高陡/直立边坡快速地形测量及三维数值建模方法[J].工程地质学报,2019,27(5):1000-1009.
- 刘帅,栾奎峰,谭凯,等.基于无人机LiDAR点云的多类型植被覆盖滩涂地形滤波[J].遥感技术与应用,2021,36(6):1272-1283.
- 马富明.无人机影像匹配点云在大比例尺DEM数据生产中的应用[J].水科学与工程技术,2022(1):61-64.
- 王龙.无人机倾斜影像密集匹配点云的处理与应用[D].贵阳:贵州师范大学,2021.
- 李涛,袁中朝,沈彪群,等.无人机影像匹配点云技术在道路测设中的应用[J].测绘通报,2018(6):156-159.
