联接弱交流电网MMC-HVDC系统的直流功率传输能力提升方法
2023-07-30郭春义王燕宁赵成勇
郭春义, 林 欣, 王燕宁, 杨 硕, 赵成勇
(1.华北电力大学 电气与电子工程学院,北京 102206;2.国网上海市电力公司 松江供电公司,上海 201600)
0 引 言
模块化多电平换流器高压直流输电(modular multilevel converter based high voltage direct current,MMC-HVDC)由于具备自换相能力,可快速独立调节有功功率和无功功率,无换相失败问题,尤其适用于向弱交流电网甚至无源网络供电[1-3]。随着大规模新能源及远距离大容量高压直流输电技术的快速发展,直流输电容量快速增长;而所联接交流电网的强度,一般以短路比(short circuit ratio,SCR)为衡量指标,也逐渐减弱。研究表明,当SCR减小,例如换流站与交流系统的并联联络线故障或检修停运时,会制约向弱交流电网传输的最大有功功率[4-6],甚至引发MMC-HVDC系统振荡失稳。因此,有必要深入研究联接弱交流电网时MMC-HVDC系统的稳定性问题,提出振荡抑制措施以提升直流功率传输能力,保证弱交流电网工况下也能维持额定功率水平。
稳定性的常见分析方法主要包含特征值法[7,8]与阻抗法[9,10]。其中,特征值法侧重时域层面的分析,基于状态空间模型,便于确定系统的整体稳定性及振荡特征,迅速定位导致失稳的关键环节;阻抗模型从频域层面出发,基于阻抗的传递函数模型,可直观揭示振荡机理,同时有明确的裕度指标反映系统的稳定性。已有文献多采用其中一种方法进行稳定性分析,但两种方法各有侧重、相辅相成,结合使用可综合展现时域、频域特征,使稳定性问题的解析更全面。
要提升MMC-HVDC系统的直流功率传输能力,需抑制传输功率较大时的直流振荡失稳现象。目前已有的振荡抑制方法大致可分为两类,一类是通过外加装置[11,12],引入无源阻尼支路重塑换流器直流侧阻抗特性来维持系统稳定,该方法需增加额外投资成本,同时将带来额外的功率损耗;另一类是附加阻尼控制[13-19],在换流器直流侧输出回路上引入电压电流反馈,等效增加阻尼支路以改善其对外特性,最终使系统满足Nyquist稳定性判据从而保持稳定,该方法引入的“阻尼支路”仅等效存在于控制回路,不会引起额外的功率损耗,因此得到了广泛关注和应用。
对于MMC-HVDC系统的直流侧稳定性问题,为抑制振荡并提升系统稳定性,已有文献将改进控制设定在有功功率控制环上[13-15],或将虚拟电阻引入直流电压控制环[16-19]。对于引入有功功率控制环的附加控制,文献[13-14]分别以直流电压、直流电流为前馈量在控制环中等效引入了虚拟电阻;文献[15]则在换流站桥臂上引入了由直流电流决定的可控阻尼补偿电压,并对比了3种不同引入策略的作用效果及适用场合。对于引入直流电压控制环的附加控制,文献[16]对比了将直流电压反馈引入控制器外环、中部指令值及内环3处不同位置时的控制特性;文献[17-18]通过在直流电压控制环中引入直流电流反馈等效提升换流站对外阻抗特性,提高了向无源网络、海岛供电的功率传输容量及稳定性,但该方法将为系统引入稳态误差;文献[19]在直流电流反馈的基础上增设了电压补偿环以消除直流电压的稳态误差,针对潮流反向工况提升了其功率传输能力。
上述文献表明,通过引入虚拟电阻,MMC-HVDC系统的直流功率传输能力能够得到提升,但在进行附加控制的机理分析时多数文献仅从频域阻抗特性层面进行,缺乏参数可行域及功率传输提升水平的定量分析。同时,当系统所联接交流电网强度较弱时,功率传输能力更易受到限制,该工况下的稳定性问题同样值得深入研究。
本文针对联接弱交流电网时MMC-HVDC系统功率传输受限的问题,从时域、频域两方面研究了交流系统强度对直流功率传输能力的影响,明确了弱交流电网工况下功率传输受限的原因。基于参与因子分析所得到的关键影响因素,提出了一种功率传输能力提升方法,给出了时域、频域两方面控制策略提升作用的机理解释,并定量给出了控制参数的可行域及功率传输能力的最大提升水平。本文所提方法在避免稳态误差的前提下,有效提升了系统的直流功率传输能力。
1 MMC-HVDC系统
本文研究的MMC-HVDC系统结构如图1所示,主电路及控制参数分别如表1、表2所示。系统主电路由两端对称的交流系统、联接变压器、MMC换流器及直流线路组成;控制系统包含采用经典电流矢量控制(vector current control,VCC)的外环与内环控制板块、锁相环(phase lock loop,PLL)与环流抑制板块(circulating current suppression control,CCSC)。
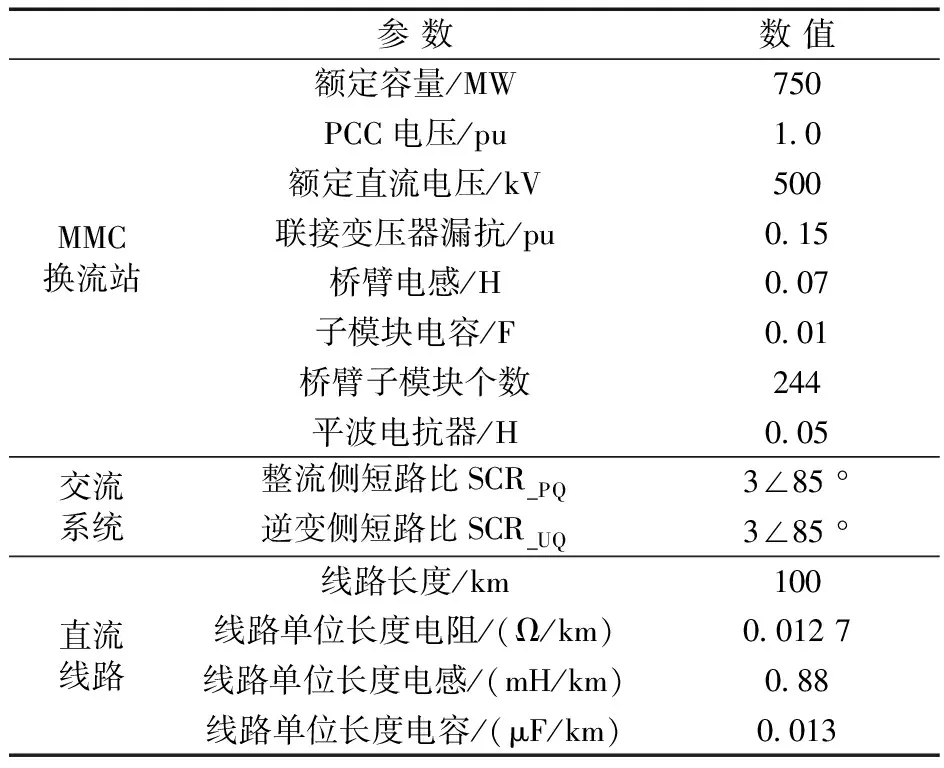
表1 MMC-HVDC系统主电路参数

表2 控制系统参数
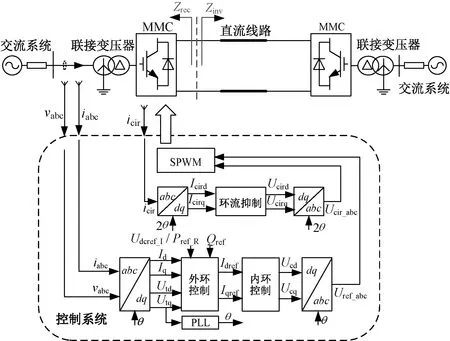
图1 MMC-HVDC系统结构图Fig.1 Diagram of MMC-HVDC system
图1中以整流侧为例对控制系统进行标识,逆变侧同理。该系统中,整流侧MMC采用定有功功率和无功功率控制方式(简称为定PQ控制),逆变侧MMC采用定直流电压和无功功率控制方式(简称为定UQ控制)。两侧控制系统结构一致,区别仅体现在控制量上,故在图中统一描述,其中,仅与整流侧相关参数标识为下标“_R”,如整流侧外环有功功率参考值Pref_R;仅与逆变侧相关参数标识为下标“_I”,如逆变侧外环直流电压参考值Udcref_I。
2 MMC-HVDC系统的小信号模型
为分析MMC-HVDC系统的特性,本文采用状态空间与阻抗两种方式进行建模描述。其中,状态空间模型基于时域特性,结合特征值、参与因子等分析方法,可用于判别系统整体稳定性及振荡特征,迅速定位导致失稳的关键环节;阻抗模型从频域层面反映子系统在端口位置的对外特性,通过子系统间相互作用揭示振荡机理。
2.1 MMC系统的状态空间建模
对MMC-HVDC系统整体进行状态空间描述,具体建模过程可参考文献[20]进行,最终可建立状态空间模型如式(1)所示。
(1)
式中:x为状态变量,输入变量u=[Pref_R,Qref_R,Udcref_I,Qref_I]T,输出变量y可取任何能以输入变量与状态变量计算表达的电气量。受篇幅限制,此处不再给出状态空间方程的详细表达式。
若在稳态运行点处,对式(1)进行线性化,即可得到式(2)所示的小干扰动态模型。
(2)
式中:A阵为状态矩阵,是进行特征值及参与因子分析的关键;B阵为输入矩阵;C阵为输出矩阵;D阵为前馈矩阵。
2.2 MMC系统的直流阻抗建模
选择图1所示端口位置将MMC-HVDC系统划分为2个独立的子系统,即整流侧Zrec与逆变侧Zinv,此时该系统可等效为图2所示电路结构。
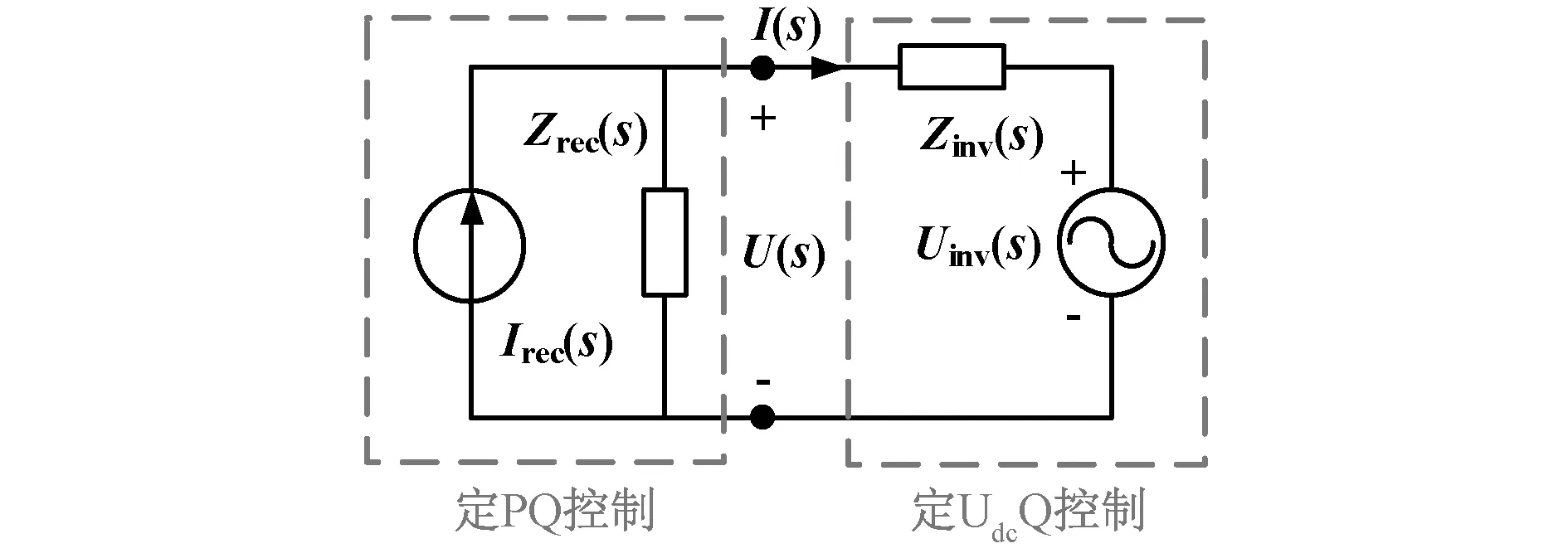
图2 MMC系统的直流阻抗等效电路图Fig.2 DC impedance equivalent circuit of MMC system
对上述MMC子系统进行阻抗建模。由于两个子系统的建模方法一致,以下采用下标“mmc”对相关变量进行统一标识。
首先对MMC子系统进行状态空间描述,在稳态运行点线性化后即可得到式(3)所示小干扰模型。其中,xmmc为子系统的状态变量,输入变量ummc取端口位置的直流电压,输出变量ymmc取端口位置的直流电流。
(3)
由式(3)消去状态变量可得到MMC子系统的直流阻抗模型,如式(4)所示。其中,根据子系统描述对象的不同,Zmmc可指代整流侧Zrec与逆变侧Zinv。受篇幅限制,此处不再给出详细表达式。
(Cmmc(sI-Ammc)-1Bmmc+Dmmc)-1
(4)
上述建模过程中,按图1所示端口位置,直流线路被包含在逆变侧阻抗Zinv中。对于直流线路,采用多个π型等值模型级联的方式建模,图3给出了长度为100 km的直流线路采用不同数目π型等值模型级联等效后的Bode图。由图可知,在低于300 Hz的频段内,各等效模型的幅频、相频特性很接近,主要区别体现在高频段。本文主要研究MMC中低频段的阻抗特性,单个π型等值模型即可满足建模等效的精度要求,因此本文采用单个π型等值模型对直流线路进行等效。
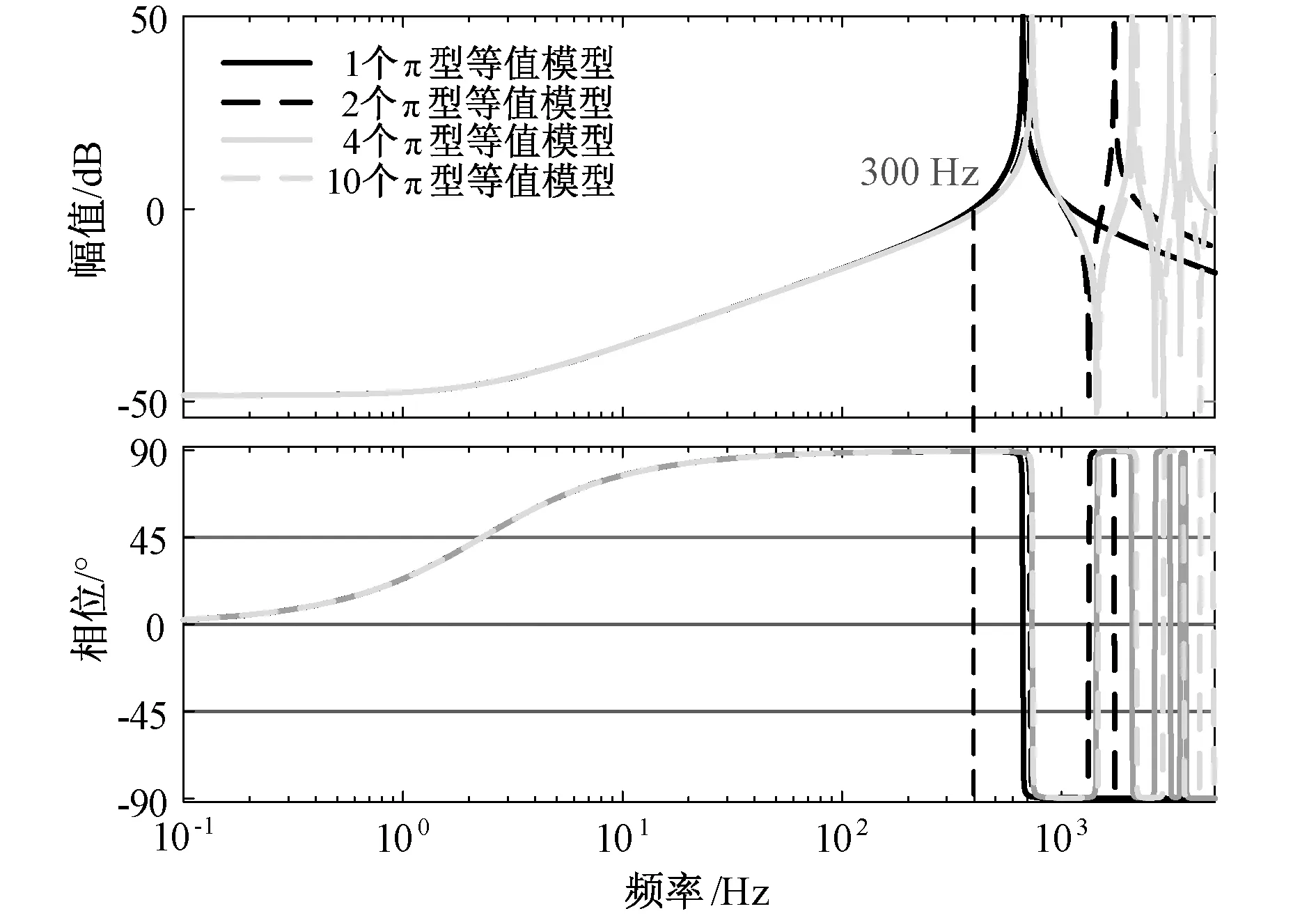
图3 直流线路采用不同等效模型的Bode图Fig.3 Bode diagram for DC line using different equivalent models
基于图2所示等效阻抗模型,端口位置电压电流的表达式可分别表示为
(5)
(6)
由式(5)与式(6)可提取出式(7)所示的最小环路增益L(s),应用Nyquist判据进行系统稳定性判别的依据可表述为[21]:当L(s)的Nyquist曲线在频率(-∞,+∞)范围内逆时针包围(-1,j0)点的圈数R等于L(s)的正实部极点数P,系统稳定。
L(s)=Zinv(s)/Zrec(s)
(7)
2.3 模型验证
为验证状态空间模型的正确性,在Matlab平台中对主要电气量的时域动态特性进行仿真计算,并与PSCAD/EMTDC平台中详细电磁暂态模型仿真结果进行对比;为验证阻抗模型的正确性,采用扫频方法[22]对详细电磁暂态模型进行频率阻抗扫描,并与直流阻抗模型理论计算结果进行对比。
MMC-HVDC系统初始参数取值如表1和表2所示,t=5 s时整流侧有功功率参考值Pref_R由1.0 pu阶跃至0.95 pu,t=7 s时阶跃回1.0 pu,主要电气量的时域动态特性对比结果如图4所示;Zrec与Zinv的阻抗特性对比结果如图5所示。图中理论计算与仿真验证结果良好的一致性表明所建立的状态空间模型及直流阻抗模型皆准确有效。
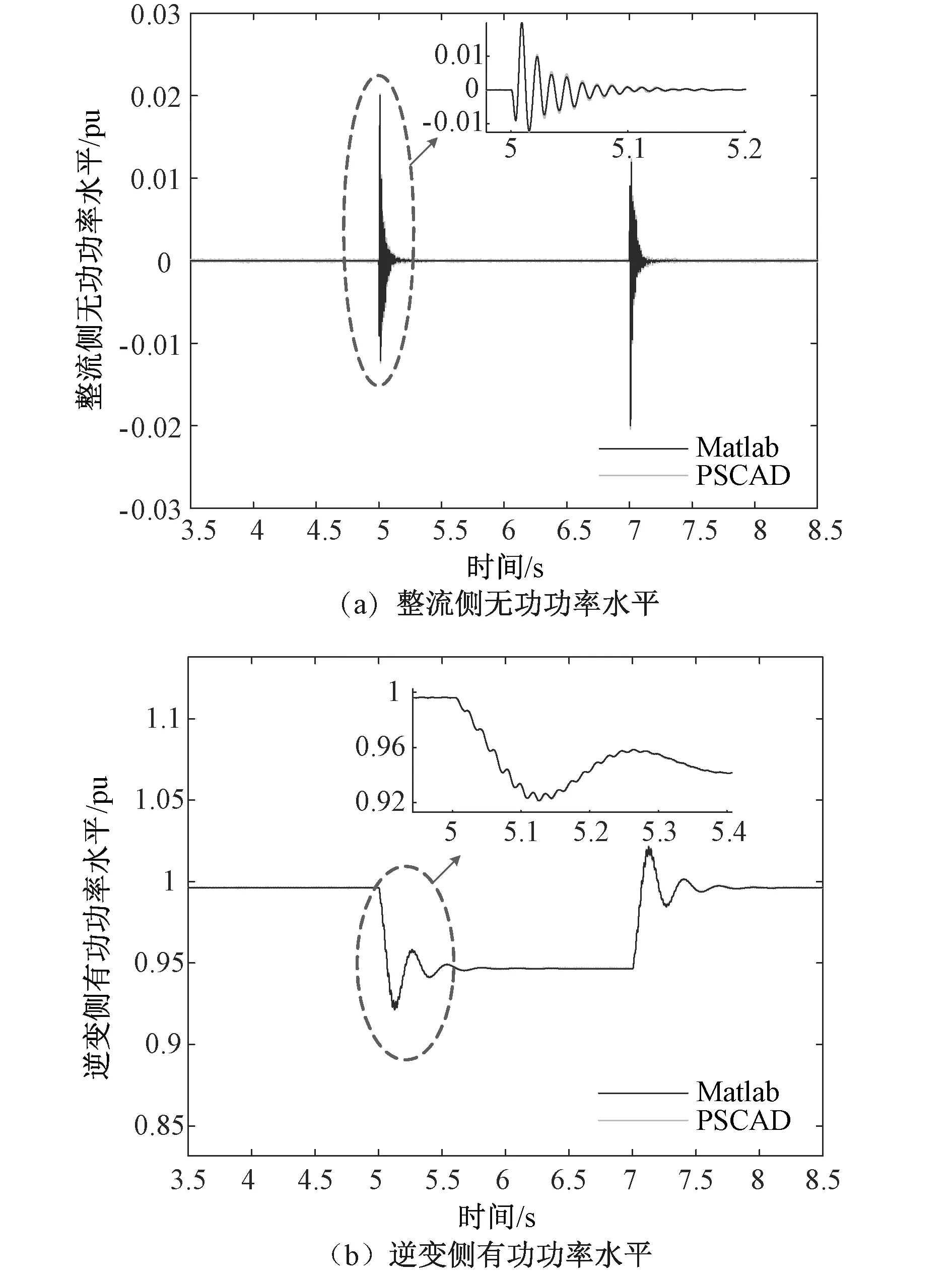
图4 Pref_R阶跃时的时域动态特性对比Fig.4 Comparison of Time-domain dynamic characteristics under step-change of Pref_R

图5 MMC系统的直流阻抗扫频结果与理论结果对比Fig.5 Comparison of DC impedance of MMC system between frequency scanning result and theoretical result
3 联接弱交流电网MMC-HVDC系统的直流功率传输能力
由图4可知,当SCR_PQ=SCR_UQ=3时,系统在额定工况下能够稳定运行。当交流系统强度下降,如降低至SCR_PQ=SCR_UQ=2.5,如图6所示,功率水平提升至0.85 pu时直流功率短时间内呈等幅振荡,提升至0.9 pu时振荡失稳。由此可知,该工况下,MMC-HVDC系统无法在额定功率水平下稳定运行,其直流功率传输能力(即满足系统稳定运行的最大功率传输水平)受到了限制。
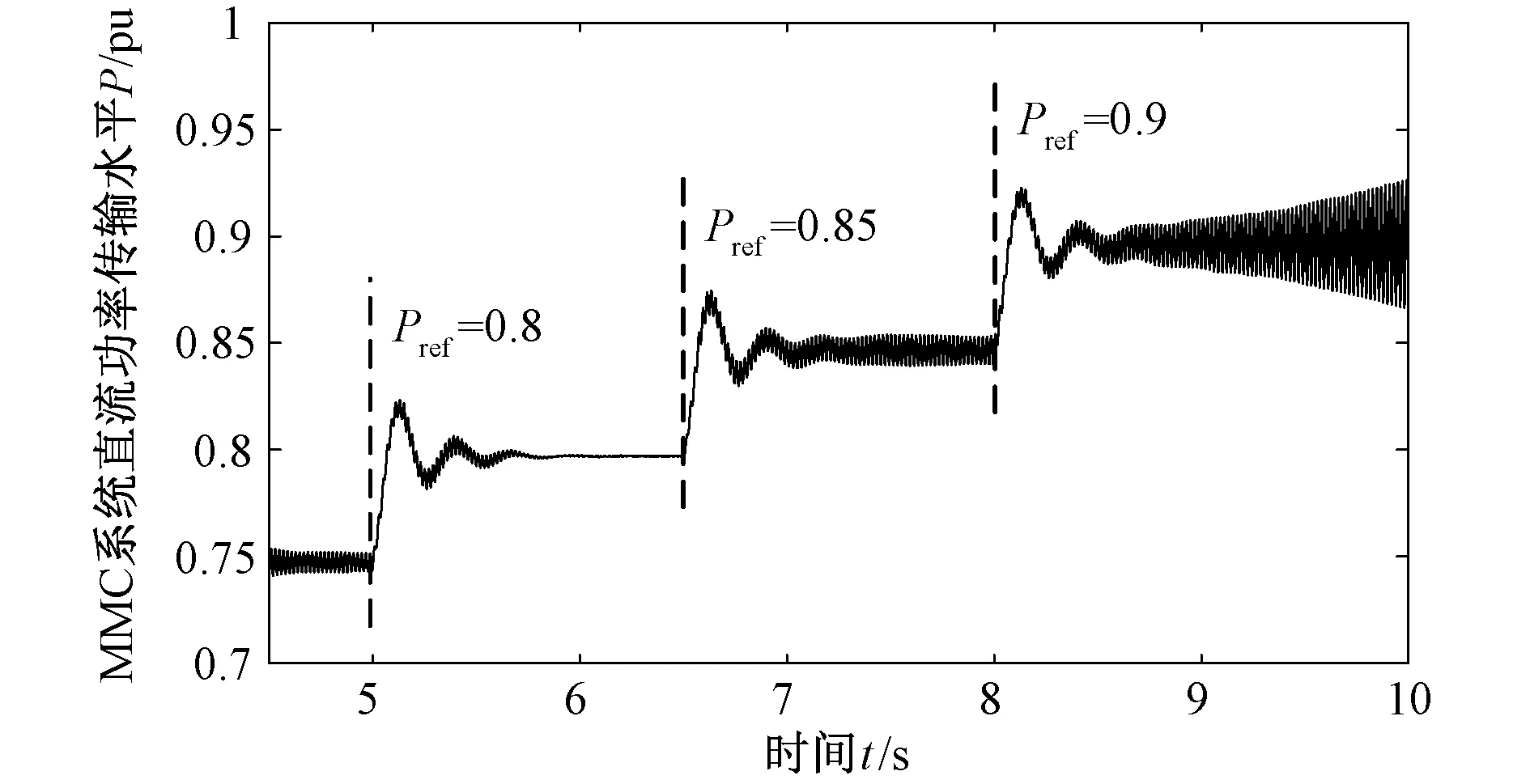
图6 时域仿真(SCR_PQ=SCR_UQ=2.5)Fig.6 Time-domain simulation when SCR_PQ=SCR_UQ=2.5
采用参与因子的分析方法,对上述工况在额定功率水平下引起振荡失稳的主导模态进行分析,结果如图7中“初始工况”标识的深色色块所示(图7中深色色块标识“初始工况”参与因子分析结果;浅色色块标识增添附加控制后的参与因子分析结果,相应解释见后文),同时计算直流线路、逆变站、整流站各部分的参与因子占比之和,结果如图7中右侧图柱所示。由图可知,该失稳现象主要与定UQ控制逆变站相关,其中主电路基频交流电流(Isd_I、Isq_I)、电流测量环节(idm_I、iqm_I)、内环电流控制环节(x1_I、x2_I)及锁相环(θ_I)对主导模态的参与程度较大,为引起系统失稳的主要参与状态变量。

图7 主导模态参与因子分析(Pref_I=1.0 pu)Fig.7 Participation factor of dominant mode for Pref_I=1.0 pu
采用Nyquist分析方法,对振荡现象的频域特征进行分析。SCR_PQ=SCR_UQ=2.5时,逆变侧Zinv(s)存在右半平面极点,L(s)的正实部极点数P=2。图8中深色曲线展现了该工况下的Nyquist曲线与Bode图(图中深色曲线为“初始工况”;浅色曲线为增添附加控制后的结果作为对比,相应解释见后文)。由图可知,40~50Hz频段内存在Zinv与Zrec相角相差180°的频率点ωx,而该频率点位置存在∣L(ωx)∣<1,因此L(s)的Nyquist曲线并未环绕(-1,j0)点,R=0,有P≠R,系统失稳。
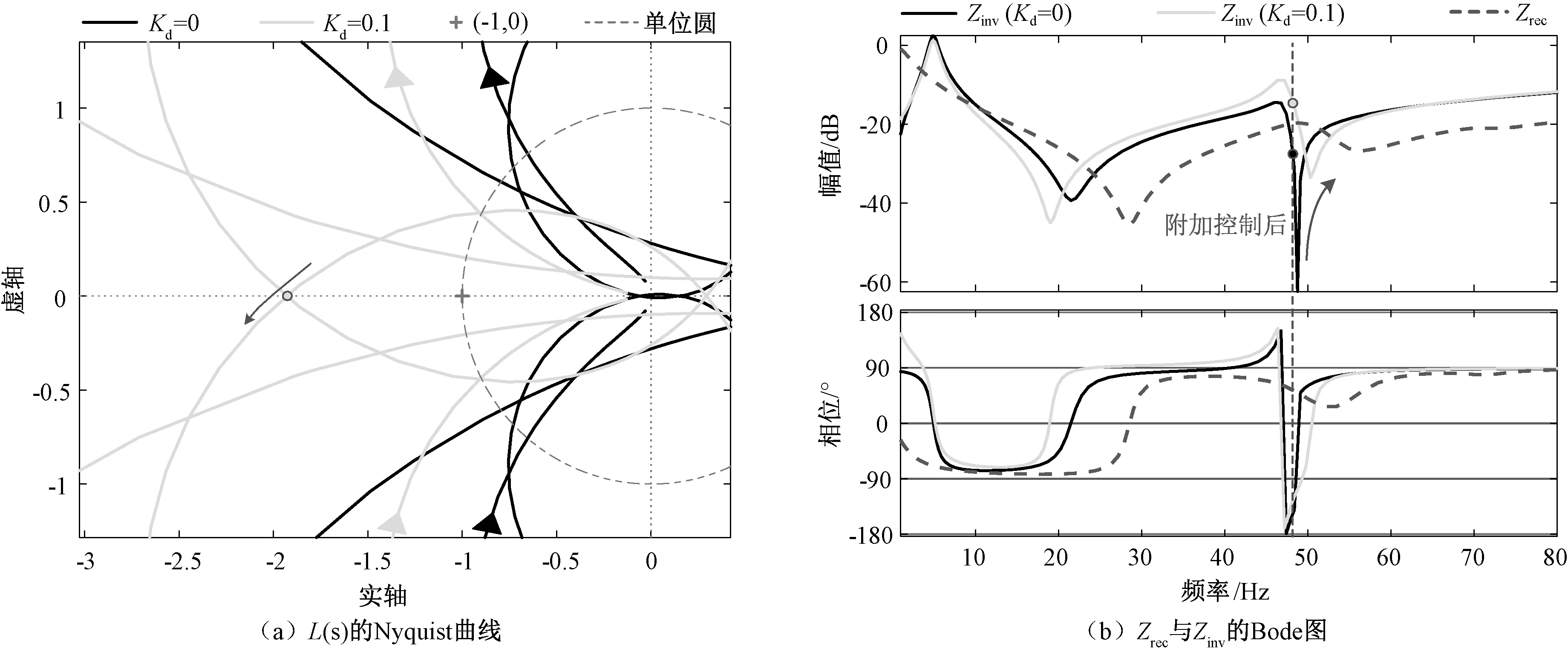
图8 附加控制对系统Nyquist曲线及Bode图的影响Fig.8 Influence of additional damping controller on Nyquist curve and Bode diagram of MMC system
本文所研究的MMC-HVDC系统直流功率传输水平本身因维持两侧换流站交流母线电压Vpcc在合理范围内而受到限制,两侧MMC系统的Vpcc都应满足式(8)所示条件限制,过大或过小的直流功率传输水平都可能导致该条件不成立。
0.95 pu≤VPCC≤1.05 pu
(8)
MMC-HVDC系统直流功率传输能力随逆变站交流系统强度SCR_UQ变化的规律如图9所示。由图可知,除式(8)所示限制外,直流功率传输能力同时受到逆变侧SCR_UQ的影响,SCR_UQ越小,对直流功率传输的限制越强。当系统工况处于图中阴影区域(SCR_UQ≤2.58),MMC系统无法传输额定功率。此时,可通过提高交流系统强度来提升直流功率传输能力,然而交流系统强度是由电网网架、运行方式等确定的,不方便调整,故增设附加控制策略以实现一定功率水平的稳定传输,是一种可行方案。
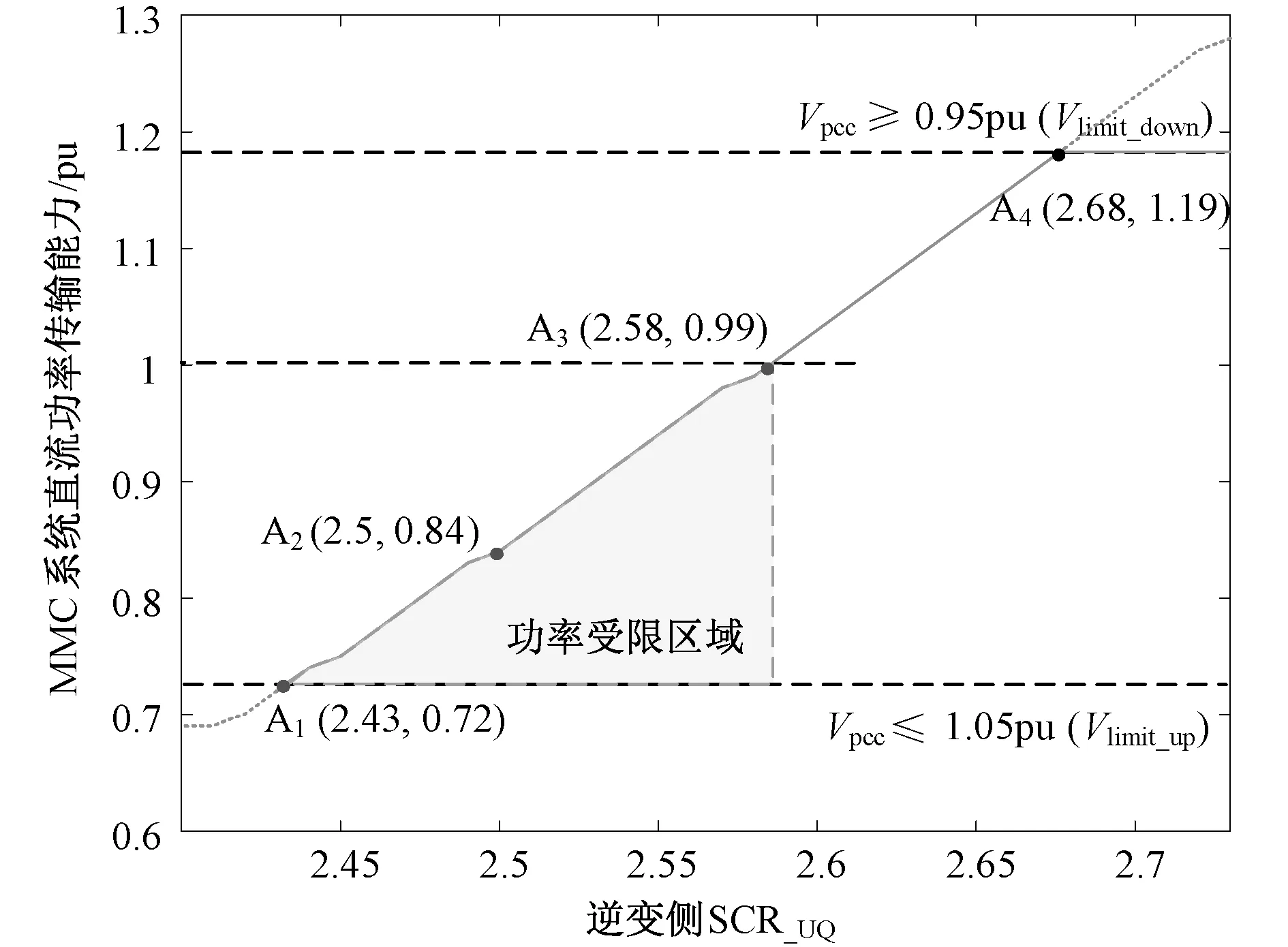
图9 逆变侧SCR_UQ对直流功率传输能力的影响Fig.9 Influence of inverter side SCR_UQ on DC power transmission capability
4 直流功率传输能力提升方法及机理分析
基于第3节,在交流系统强度较弱的工况下,MMC-HVDC系统直流功率传输受限主要与定UQ控制逆变站相关,同时考虑到定UQ控制换流站在系统功率平衡中发挥重要作用,因此本小节将在定UQ控制逆变站增设附加阻尼控制器,以提升MMC-HVDC系统的直流功率传输能力。
4.1 功率传输能力提升方法
本小节在定UQ控制换流站VCC外环引入反馈控制。考虑到不改变稳态运行点,减小稳态误差,采用图10所示附加阻尼控制策略,在直流电压控制外环中引入直流电流的偏差值作为反馈量,即将原本外环定直流电压控制的表达式修正为式(9)。
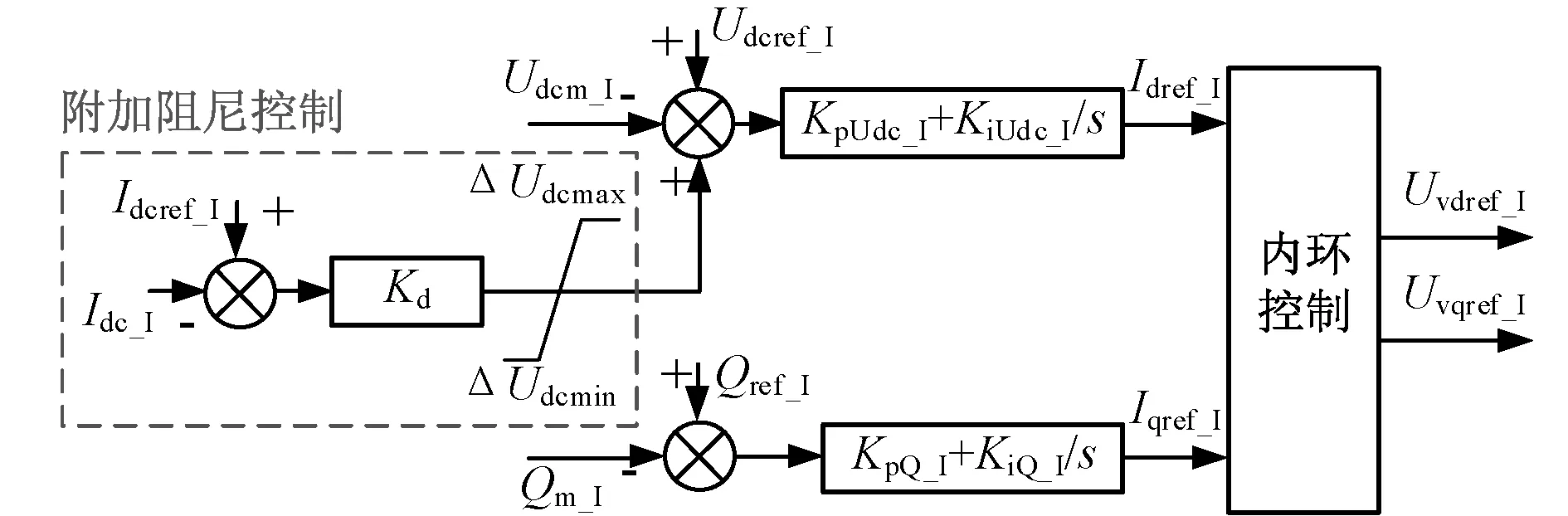
图10 功率传输能力提升方法控制框图Fig.10 Improvement method for power transmission capability
式中:Idcref_I为逆变站直流侧出口电流的参考值,Kd为阻尼控制系数,限幅环节取[ΔUdcmin, ΔUdcmax]=[-0.05 pu, 0.05 pu]。
4.2 附加控制提升功率传输能力的机理
仍以SCR_PQ=SCR_UQ=2.5为例,取Kd=0.1,增添附加阻尼控制器后,系统的主导参与因子与阻抗特性分析结果如图7、图8所示。由图8(a)中浅色曲线可知,L(s)的Nyquist曲线逆时针环绕(-1,j0)点2次,即R=2,此时L(s)的正实部极点数P=2仍成立,故系统稳定。
由图7中“Kd=0.1”标识的浅色色块,及右侧图柱对比可得,增设附加阻尼控制后整流侧主电路电气量的参与程度明显提升,表明整流、逆变站间存在交互作用,逆变侧的附加阻尼控制将会通过这种交互作用影响整流侧电气量的参与程度,从而使得系统的稳定性提高;从频域特性来看,由图8(b)中浅色曲线可知,附加阻尼控制明显改善了40~50Hz频段Zinv的幅值特性,使得Zinv与Zrec相角相差180°的频率点ωx处存在∣L(ωx)∣>1,因此L(s)的Nyquist曲线能够逆时针环绕(-1,j0)点,使得系统稳定。
在SCR_PQ=SCR_UQ=2.5的案例中,阻尼控制系数Kd对直流功率传输能力的影响如图11所示。由图可知,随着Kd取值增大,MMC-HVDC系统的直流功率传输能力呈现先增大后减小的变化趋势。当Kd在合理范围内取值(0.05≤Kd≤0.195)时,不仅能够维持弱交流工况下MMC-HVDC系统在额定功率水平下的稳定运行,还将该工况下的直流功率传输能力由0.84 pu提升至1.168 pu,大幅度提升了系统的可传输容量。

图11 阻尼控制系数Kd对直流功率传输能力的影响Fig.11 Influence of Kd on DC power transmission capability
对上述直流功率传输能力随Kd取值增大先增大后减小的变化趋势进行机理分析。取图11中点B1、B2、B4、B6所示工况,绘制MMC系统的Nyquist曲线与Bode图如图12所示。
由图12(b)可知,阻尼控制系数Kd能较大程度影响Zinv低频段(80 Hz以下)的阻抗特性。与系统稳定性相关的特性主要表现在图中阴影部分所示A、B两个频段,其中频段B固有包含Zinv与Zrec相角差180°以上的频率点,该频段内Nyquist曲线是否环绕(-1,j0)点主要取决于幅值特性。由图可得,随着Kd增大,Zinv在频段B的幅值明显增大,L(s)的幅值也随之增大,若满足∣L(s)∣>1,则有R=2,此时系统稳定。同时,Kd也将较大程度影响Zinv在频段A的相角特性,当Kd取值过大时(如图中Kd=0.2工况),频段A范围内也将产生相角差180°的频率点,可能使得系统不稳定。
具体的稳定性结果如图12(a)所示。Kd=0时,Nyquist曲线并未环绕(-1,j0)点,R=0,系统失稳;Kd=0.05及Kd=0.14时,Nyquist曲线逆时针环绕(-1,j0)点2次(由频段B特性导致),R=2,系统稳定;Kd=0.2时,Nyquist曲线逆时针环绕(-1,j0)点2次(由频段B特性导致),同时顺时针环绕(-1,j0)点2次(由频段A特性导致),此时R=0,系统失稳。因此,当且仅当Kd处于合理取值范围内,附加阻尼控制策略具备改善MMC-HVDC系统稳定性、提升直流功率传输能力的功能。
4.3 附加控制的参数可行域及对功率传输能力的提升效果
为确定该功率传输能力提升方法在不同工况下的作用效果,分别求取不同SCR_UQ下Kd对直流功率传输能力的影响,如图13(a)所示。由图可知,不同SCR_UQ取值下,随着Kd取值增大,MMC-HVDC系统的直流功率传输能力呈现相同的先增大后减小的变化趋势。

图13 不同SCR_UQ下Kd对直流功率传输能力的影响Fig.13 Influence of Kd on DC power transmission capability under different SCR_UQ
取图13(a)中三维图在额定功率工况平面的投影,得到不同SCR_UQ取值下使得系统在额定工况下能够稳定运行的Kd可调节区域,如图13(b)阴影区域所示。若以实现MMC-HVDC系统在额定工况下稳定运行为调节目标,该结果展现了不同工况下Kd取值的可行域。同时,取不同SCR_UQ下Kd调节后能够达到的最大功率传输能力,对比增设附加阻尼控制前的功率传输水平(如图9所示),直流功率传输能力的最大提升水平如图13(c)所示,图中所取各点与图13(a)中对应。由图可知,在不同SCR_UQ取值的工况下,附加阻尼控制器都能有效提升系统的直流功率传输能力,且随着SCR_UQ增大,Kd的可行域越大,能够达到的直流功率传输容量水平也越高。因此,虽本文以弱交流系统工况为例,但所提附加阻尼控制策略同样适用于强交流系统工况,可用于提升直流功率传输能力,增强MMC-HVDC系统的稳定性。
4.4 功率传输能力提升方法的有效性性验证
在PSCAD/EMTDC平台中对上述案例中的功率传输能力提升方法的作用效果进行仿真验证,结果如图14所示。
MMC-HVDC系统初始运行在Pref_R=0.8 pu,SCR_PQ=SCR_UQ=2.5的工况下,t=7 s时阶跃至Pref_R=0.9 pu,可见系统振荡失稳;t=8 s时投入附加阻尼控制,取Kd=0.1,可见系统逐渐收敛至稳定状态,且在后续Pref_R阶跃至1.0 pu及1.05 pu时仍保持稳定。由图11可知,未投入附加控制前,系统的直流功率传输容量仅0.84 pu;投入Kd=0.1的附加控制后,直流功率传输能力被提升至1.05 pu以上。时域仿真与理论计算结论相符,验证了上述稳定性分析结果的准确性与功率传输能力提升方法的有效性。
同时,由图14可得,附加阻尼控制并未影响系统的稳态运行工况,MMC系统稳定后的功率传输水平与参考值Pref_R一致,逆变侧直流电压始终维持在1.0 pu,表明该控制策略在有效提升系统的直流功率传输能力的同时并未引入稳态误差。
5 结 论
本文针对联接弱交流电网时MMC-HVDC系统功率传输受限的问题,提出了一种直流功率传输能力提升方法,从时域、频域层面解析了交流系统强度对直流功率传输能力的影响及该控制策略的作用机理,并定量给出了控制参数的可行域及功率传输能力的最大提升水平,主要结论如下:
(1)MMC-HVDC系统的直流功率传输能力受到交流系统强度的影响,交流系统的强度越弱,系统直流功率传输受到的限制越强。
(2)通过在定UQ控制逆变站直流电压控制外环增添附加阻尼控制环节,合理选取阻尼控制系数,可在不引入稳态误差的前提下有效提升MMC-HVDC系统的直流功率传输能力。机理表现为:从时域特性看,附加阻尼控制通过整流逆变站间的交互作用提升了整流侧电气量的参与程度,从频域特性看,附加阻尼控制一定程度重塑了逆变侧MMC子系统的幅值特性,从而提升了系统的稳定性。
(3)附加阻尼控制器的作用效果受到逆变侧交流系统强度的影响,逆变侧交流系统强度越强,维持MMC-HVDC系统在额定功率工况下稳定运行的附加控制参数可行域越大,增设附加控制后可传输的直流功率水平也越高。
