基于半监督学习支持向量机的制动意图识别
2023-07-26毛星宇邓耀国杨昌波
刘 鑫,毛星宇,邓耀国,杨昌波
(1.广西大学 机械工程学院,广西 南宁 530004;2.东风柳州汽车有限公司 商用车技术中心,广西 柳州 545005)
0 引言
随着科学技术的不断发展,汽车的电动化、智能化越来越成为当下汽车发展的重要主题[1],同时新能源汽车的发展有效地缓解了能源危机和环境污染[2]。为了提高汽车的能源利用效率,专家和学者们也对各种再生制动技术进行了广泛的研究。研究表明,若采用再生制动技术可以减少15%的能源消耗[3,4],同时可以提高车辆的行驶里程。再生制动控制策略是通过识别驾驶员的制动意图以实现制动力的分配[5,6],因此对驾驶员的制动意图识别的准确性直接影响着能量回收的效率。
目前,对于制动意图识别的研究主要有两大类[7],一类是通过研究驾驶员的脑电波信号或车辆周围的环境信息提前判断制动意图,该方法虽然可以提高综合制动性能,但是存在可靠性差、准确率低等缺点[8,9]。另一类是通过研究驾驶员在制动过程中的操作信号进行制动意图识别,该方法具有较高的可靠性[10,11]。Kim 等[12]提出了一种基于神经生理学特征的制动意图识别模型,实现了在紧急情况下提前识别制动意图,进行紧急制动。Li 等[13]提出了一种隐形马尔可夫和贝叶斯过滤的换道意图识别模型,识别的准确率达到了90.98%。周恒平等[14]提出了一种基于极限学习机的驾驶员制动意图识别方法,选取了制动踏板力、制动踏板位移及变化率为特征参数,其模型的识别准确率达到了95.56%。
神经网络在制动意图识别中运用比较广泛,凭借其高效的处理非线性问题的能力,可以获得较高的制动意图识别精度[15,16]。潘宁等[17]提出了一种基于神经网络的在线制动意图识别方法,有效地提高了制动机构的使用寿命,增强了制动的舒适性。刘晏宇等[18]提出一种神经网络和模糊控制的混合算法,并通过Simulink 仿真和台架试验验证了该方法可以准确的识别驾驶员的制动需求,提高了制动系统的稳定性。赵轩等[19]通过构建双层隐形马尔可夫模型实现了基于驾驶意图识别的复合制动,结果表明在低速制动时能量回收率达到了43.84%。因此,驾驶员制动意图的准确识别对于提高能量的利用率是非常重要的。
通过以上分析可以看出,目前对于驾驶意图识别仍然存在准确率不高适应性不强的问题[20,21]。因此,本文提出一种基于半监督学习支持向量机(SVM)的制动意图识别方法,以制动踏板力、制动踏板行程、制动减速度为特征参数,并且引入未标记的样本进行半监督学习优化SVM 制动意图识别模型,从而提高制动意图识别模型的准确性。
1 实验数据采集
制动意图识别实验采用便携式汽车动态性能测试仪进行数据采集,该测试设备主要由制动踏板力传感器、制动踏板位移传感器、数据采集卡、GPS 定位器、数据采集显示器等部件组成,如图1 所示。其中制动踏板力传感器是通过螺栓与制动踏板相连接实时测试驾驶员对制动踏板所施加的力。制动踏板位移传感器是采用的ES02 型位移传感器,综合误差≤0.2%。GPS 定位器是固定在车辆顶部的中央,目的是实时测量车辆的速度。实验数据采集路线为南宁市区工况,其中包括城市普通道路、城市高架道路、城市拥堵道路等,如图2 所示。实验的采样频率为1 Hz,共采集132568 条数据。采集的数据包含时间、车速、制动踏板力、制动踏板位移、侧向加速度、方向盘转角、车身侧倾角等。

图1 实验设备

图2 实验路线
选取制动踏板力、制动踏板位移和制动减速度作为制动意图识别的特征参数,并将制动意图分为低强度制动、中强度制动、高强度制动三种类型。低强度制动是驾驶员在车辆巡航过程中为了使速度保持在某一区间内而进行的缓慢减速。该工况通常会出现在车辆跟随、短下坡路段等,其制动踏板力、制动踏板位移和制动减速度均比较小。中强度制动是驾驶员在等红绿灯或车辆比较拥堵时进行的制动行为,而这些制动工况通常是驾驶员可以提前进行预判,并作出相应的规划。该工况是一种频繁且安全的制动情况,主要是为了主动避让一些障碍物而进行的减速行为。因此该工况下的制动踏板力、制动踏板位移和制动减速度为中等水平。高强度制动是驾驶员在遇到紧急情况时需要立即停车而进行的紧急制动。该工况下的制动踏板力、制动踏板位移和制动减速度是最大的。
2 识别模型建立
2.1 特征参数分析
为了将制动意图识别问题转化为可求解的数学问题,本文将低强度制动、中强度制动、高强度制动分别标记为1、2、3。表1 为实验采集的部分制动意图数据。为了更直观地描述特征参数与制动意图之间的相互联系,将获取的带有标记的实验数据集进行计算类中心,如图3 所示,其中黑色实心圆点代表三类制动工况的类中心。从图中可以看出三种不同制动工况的特征参数分别汇聚在三个类中心周围,可以明显的区分出低强度制动、中强度制动、高强度制动。因此,本文将制动踏板力、制动踏板位移和制动减速度作为制动意图识别的特征参数是非常合理的。
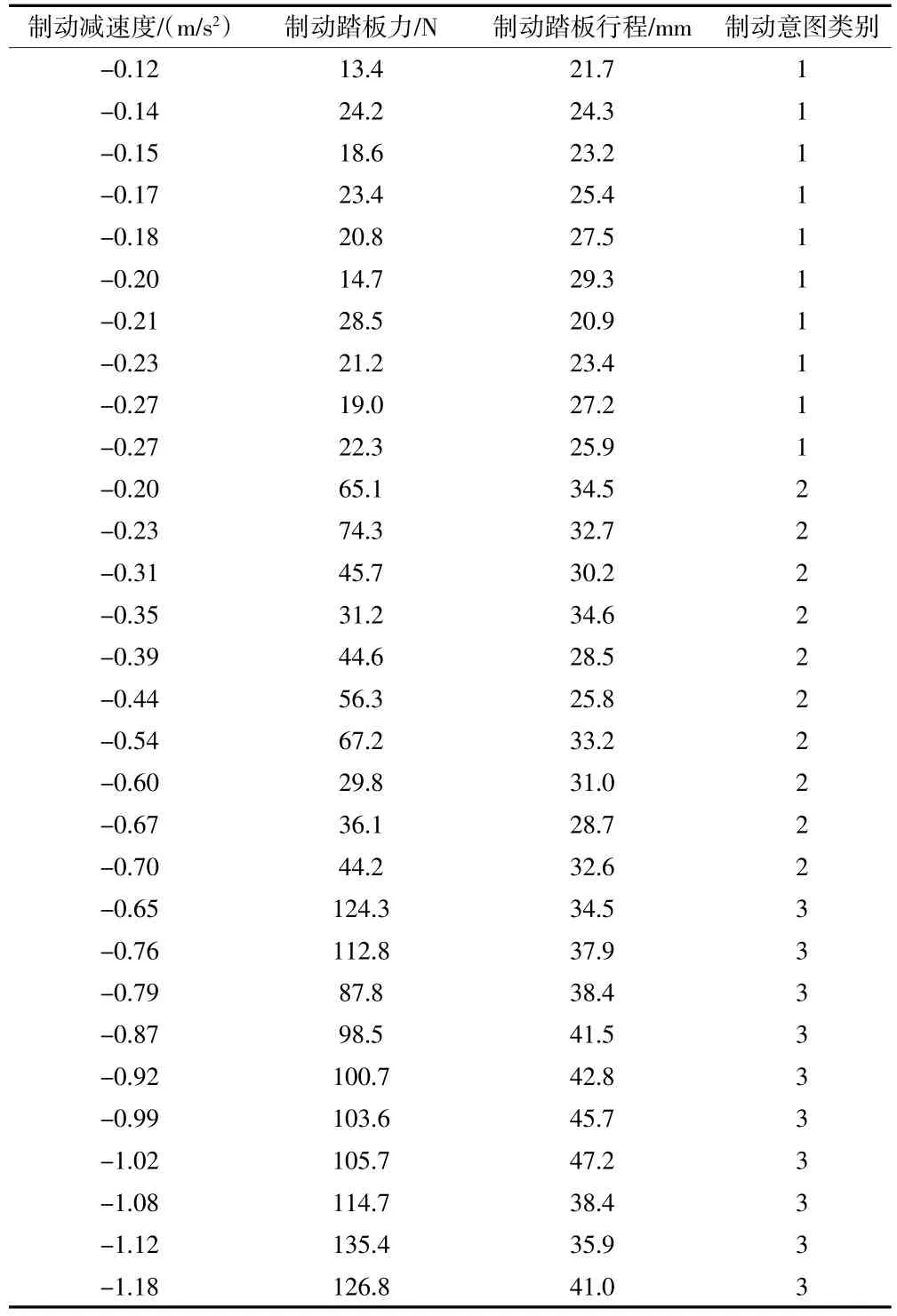
表1 典型制动意图的部分数据

图3 实验数据散点
由于制动踏板力、制动踏板行程、制动减速度的量纲不同且差异较大,为了防止特征参数在后续的分析计算中失真,本文采用min-max 归一化处理,将特征参数的值转换到[0,1]之间。计算公式为:
式中,x*i为归一化后的特征参数,xi为原始的特征参数,min(x)为特征参数的最小值,max(x)为特征参数的最大值。
2.2 基于C4.5 算法的制动意图识别模型
C4.5 算法是一种自顶向下生成决策树的经典分类算法,具有结构简单、准确率高等优点。本文构建的C4.5 制动意图识别模型的决策树如图4 所示。其中类别分为三类:1-低强度制动、2-中强度制动、3-高强度制动,特征参数为:a-制动踏板力、b-制动踏板行程、c-制动减速度。假设制动意图识别模型的数据集样本训练集为D,类集合为Ci(i= 1,2,3),属性为A,其中Ci类样本占集合D的比例为pi。
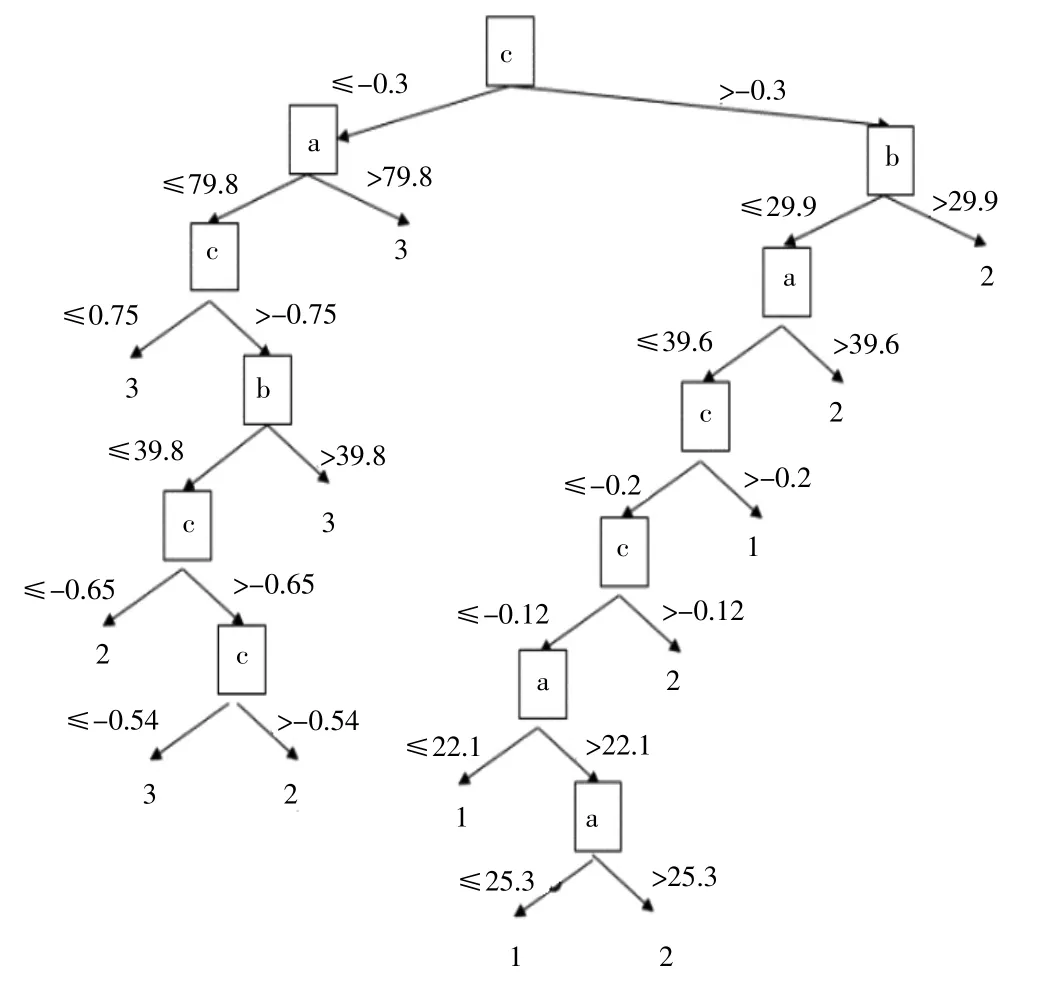
图4 基于C4.5 制动意图识别模型的决策树
D的信息熵为:
A 的信息熵为:
A 的信息增益为:
A 的分裂信息为:
A 的信息增益率为:
重复以上过程即可计算出每个属性的信息增益率,属性A 的重要程度与信息增益率成正比。因此选择信息增益率大的A 作为决策树的分裂属性。
2.3 基于ELM 的制动意图识别模型
ELM 是一种单层前馈人工神经网络,与BP 神经网络相比,具有计算复杂度低、运算速度快等优点。ELM 在训练时只需计算隐藏层和输出层之间的连接权值,其他权值均为随机产生。ELM 是由三层神经网络构成,分别为输入层、隐藏层、输出层,如图5 所示。

图5 ELM 网络结构
假设有M 个样本X= (xj,tj),其中xj= [xj1,xj2,…,xjm]∊Rm,tj= [tj1,tj2,…,tjn]∊Rn,隐藏层数目为L。则ELM 的输入输出关系可以表示为:
式中,wi为第i个隐藏层单元的输入权重,bi为第i个隐藏层单元的偏置,βi为第i个隐藏层单元的输出权重,gc为激活函数。
ELM 的学习目标是输出误差最小,即意味着代价函数值最小,与xj相关联的期望值tj为:
最小损失函数为:
2.4 基于SVM 的制动意图识别模型
SVM 是一种监督学习算法,它是通过核函数将样本从低维空间映射到高维空间,以转化为线性可分问题。SVM 对解决高维度、小样本的分类问题具有较高准确性,该方法的灵感主要来源与二元分类,但是在解决实际问题时大部分为多分类问题。因此为了构建多分类的SVM,本文使用多个二元SVM 集成一个多分类SVM。
假设有W 个样本,训练集为X′ = {(x1,y1),(x2,y2),…,(xw,yw)},类标签为YW∊{1,2,3}。首先通过训练数据集训练制动意图识别模型,然后通过测试数据集对训练模型进行验证。由于本研究将制动类别分为低强度制动、中强度制动、高强度制动三种,所以需要训练三种不同类别的SVM 分类器才能实现对三种制动意图的识别,每一个SVM 二分类器都可以看作一个二次规划问题:
式中,α为Lagrange 乘子。
采用RBF 核函数作为SVM 的核函数,以提高SVM 分类器的准确性,其表达式为:
式中,σ为核函数的宽度参数。
分类决策函数为:
为了提高SVM 制动意图识别模型的计算精度和收敛速度,本文采用粒子群算法对寻优的核函数参数和惩罚因子进行优化。优化流程如图6 所示。
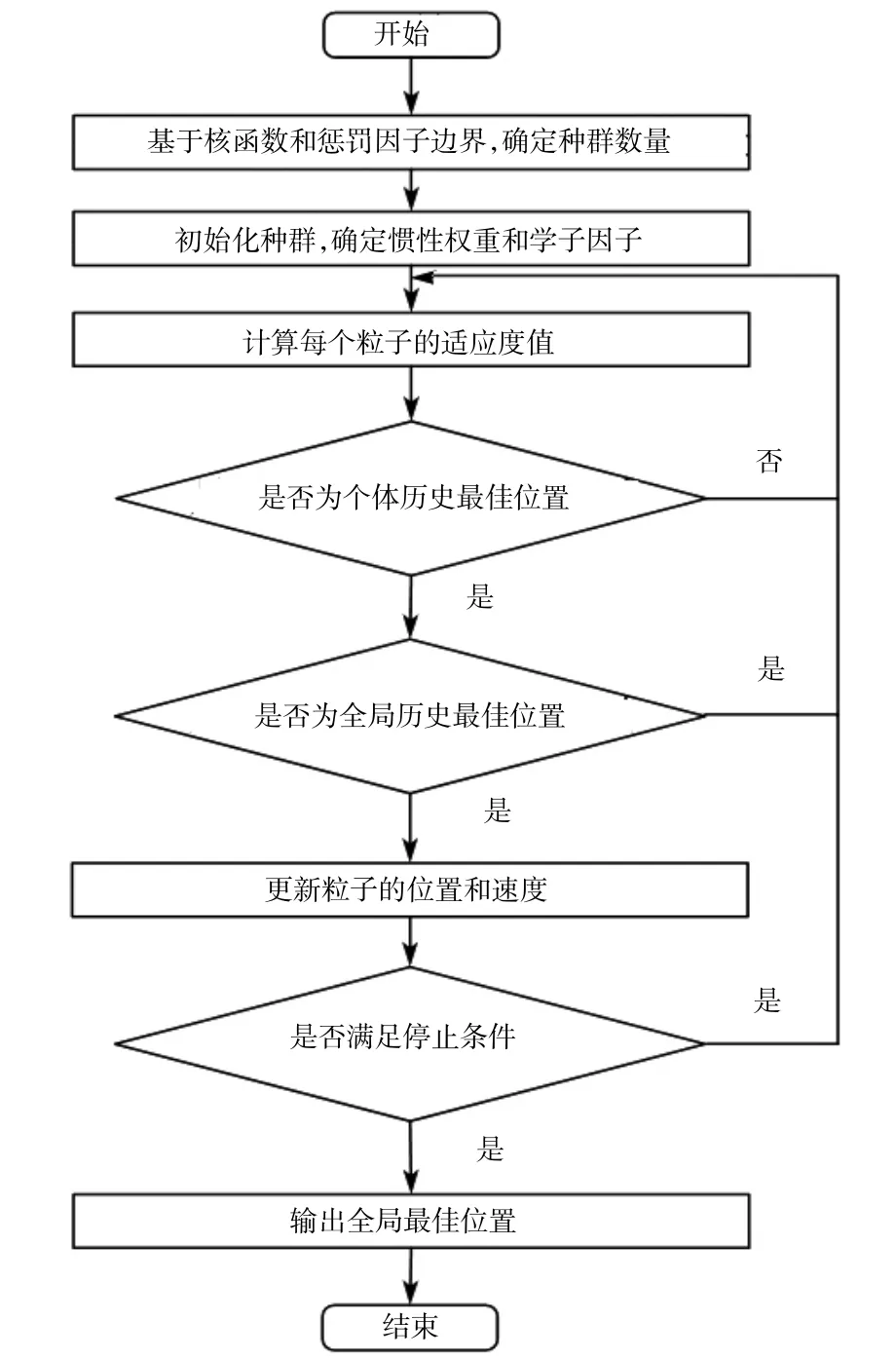
图6 PSO 优化核函数参数和惩罚因子的流程
2.5 基于半监督学习SVM 的制动意图识别模型
为了提高制动意图识别模型的准确性,因此需要大量有标记的训练样本集。然而实际生活中有标记的数据是少量的,仅通过实验模拟进行获取的,但是存在大量无标记的数据。本文所利用的有标记数据均为后期自行标记的,对于采集到的海量数据标记部分仅为一小部分。为了充分利用未标记数据提升SVM 制动意图识别模型,本文将启发式半监督学习的思想运用到SVM 制动意图识别模型中。首先通过有标签的数据训练一个SVM 分类器,然后对未标记的数据进行分类,从而获得这部分数据的“伪标签”,最后将置信度高的数据扩充的训练集中。通过以上方法实现了半监督学习SVM 的制动意图识别模型,流程如图7所示。

图7 基于半监督学习SVM 的制动意图识别模型训练流程
在基于半监督学习SVM 的制动意图识别模型构建过程中,对于置信度较高的“伪标签”数据的选取是非常重要的。因此本文采用K-means 聚类思想对“伪标签”数据进行分析。
假设样本中两个数据点为:x=(x1,x2,x3)、y=(y1,y2,y3),则它们之间的距离为:
假设样本容量为N 的数据集{a1=(x1,y1,z1),…,an=(xn,yn,zn),},则每个样本点到其他点之间的距离之和为:
计算该数据集的类中心点:
计算每个样本点到聚类中心的距离:
样本点的聚类边界为:
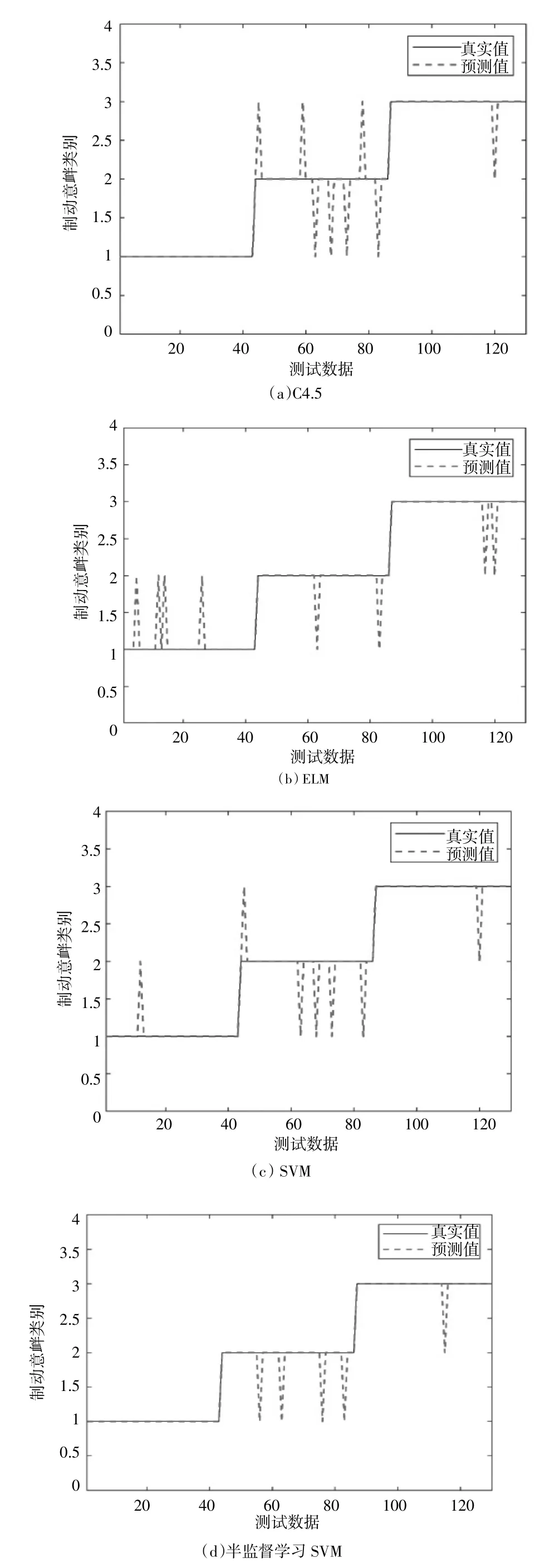
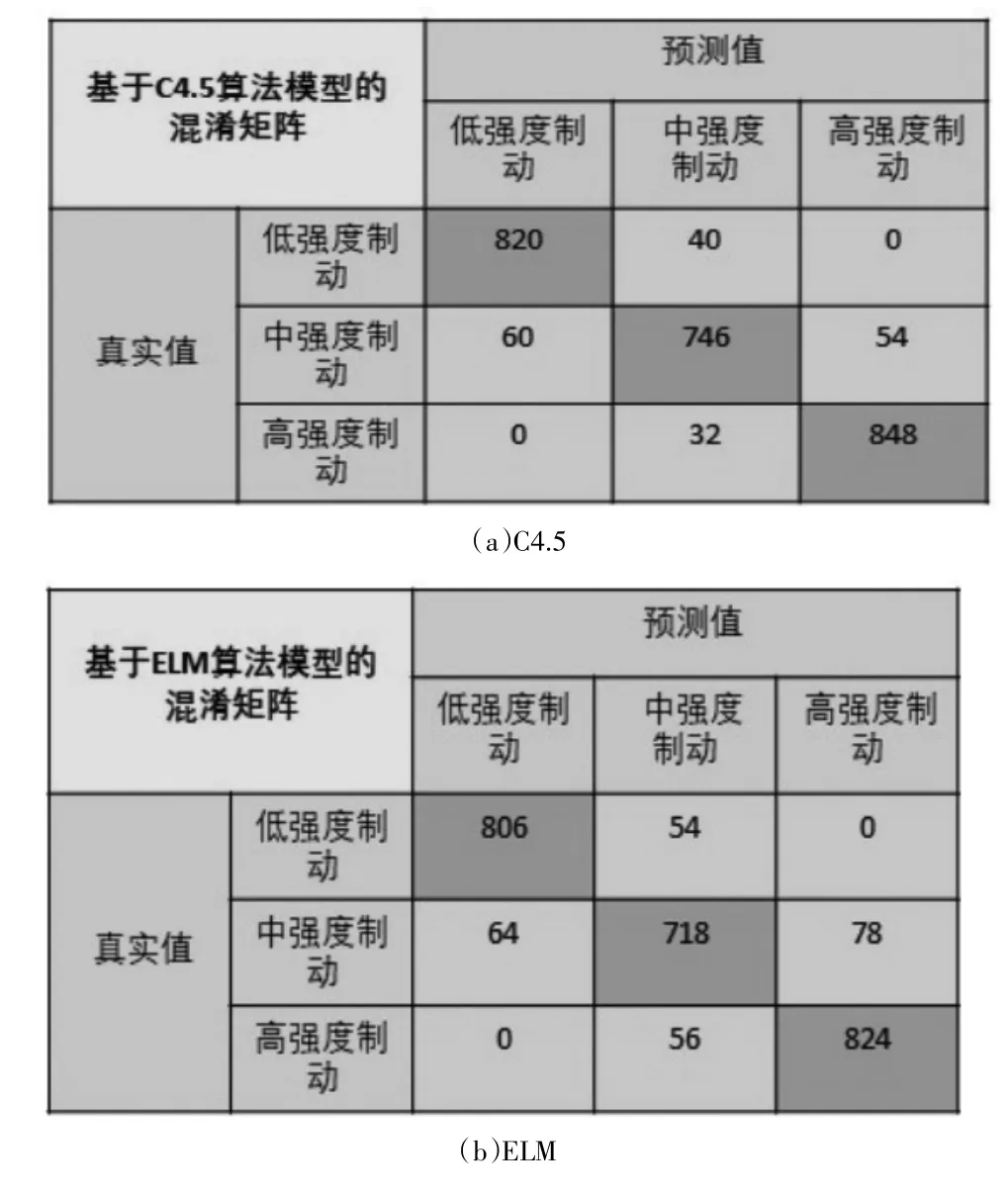
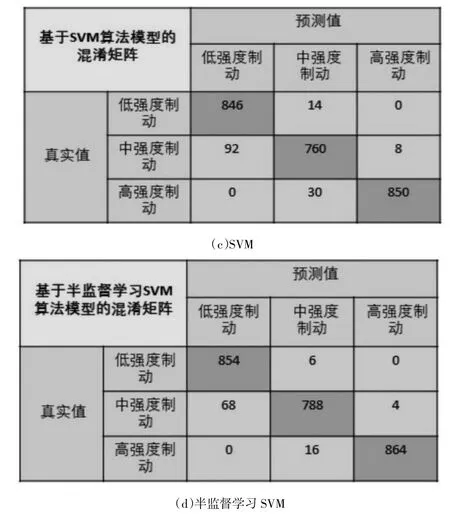
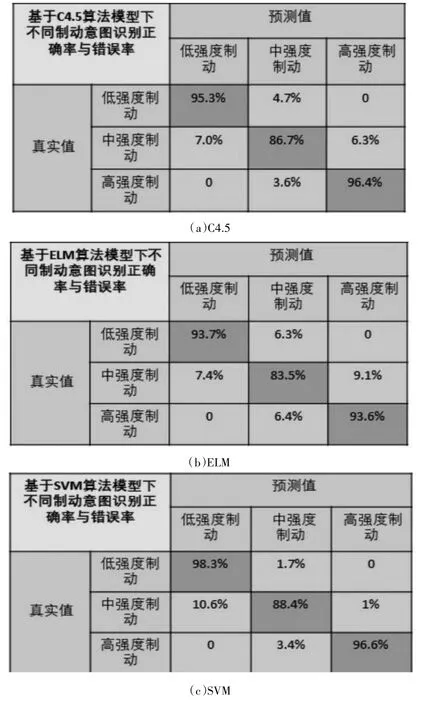
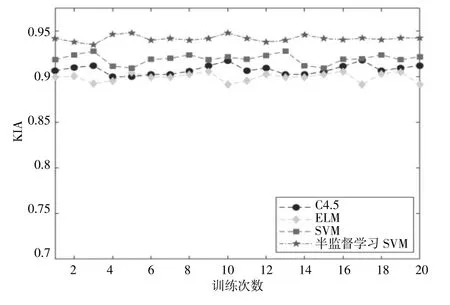
如果样本数据点的bm 本文将所采集的制动意图识别数据集的70%作为训练集,剩余的30%作为测试集。对所构建的C4.5、ELM、SVM 和半监督学习SVM 的制动意图识别模型分别进行训练和验证,其测试结果如图8 所示。从图中可以看出C4.5 制动意图识别模型有8 次识别错误,ELM 制动意图识别模型有8 次识别错误,SVM 制动意图识别模型有7 次识别错误,半监督学习SVM 制动意图识别模型仅有5 次识别错误,小于其他3 种识别模型。因此,本文构建的基于半监督学习SVM 制动意图识别模型的识别正确率高于其他三种。 图8 制动意图识别模型测试结果 为了更加准确地分析所构建的制动意图识别模型的准确性,统计了多次训练结果并建立了各种识别模型的混淆矩阵,如图9 所示。与混淆矩阵相对应的正确率和错误率矩阵如图10 所示。在低强度制动意图识别任务中,通过对860 次制动意图的识别,C4.5模型有40 次识别错误,正确率为95.3%;ELM 模型有54 次识别错误,正确率为93.7%;SVM 模型有14 次识别错误,正确率为98.3%;半监督学习SVM 模型仅有6 次识别错误,正确率达到了99.3%。并且对于低强度制动意图识别错误的样本均被识别为中强度制动工况,没有被错误识别为高强度制动工况,说明所构建的模型参数较为合理。在中强度制动意图识别任务中,通过对860 次制动意图的识别,C4.5 模型有114 次识别错误,正确率为86.7%;ELM 模型有142次识别错误,正确率为83.5%;SVM 模型有100 次识别错误,正确率为88.6%;半监督学习SVM 模型仅有72 次识别错误,正确率达到了91.6%。在高强度制动意图识别任务中,通过对880 次制动意图的识别,C4.5 模型有32 次识别错误,正确率为96.4%;ELM模型有56 次识别错误,正确率为93.6%;SVM 模型有30 次识别错误,正确率为96.6%;半监督学习SVM 模型仅有16 次识别错误,正确率达到了98.2%。通过以上数据的对比,说明基于半监督学习SVM 的制动意图识别模型在低强度制动、中强度制动、高强度制动三个工况均有较高的识别精度,均优于C4.5 模型、ELM 模型和SVM 模型。 图9 制动意图识别结果的混淆矩阵 图10 制动意图识别结果的正确率与错误率矩阵 为了进一步对半监督学习SVM 的制动意图识别模型进行评估,采用KIA系数对模型的正确率进行评价,KIA系数是一种衡量分类精度的指标,系数越高说明该模型的分类准确度越高。KIA系数的计算公式为: 式中,p0为观测精确性单元的比例,pc为偶然性一致单元的比例,xii为混淆矩阵中对角线上的元素,x+i为第i行所有元素之和,x+i为第i列所有元素之和,N为所有元素之和。 图11 为不同识别模型在训练过程中KIA的变化曲线图。从图中可以看出,半监督学习SVM 模型的KIA值最大,ELM 模型的KIA值最小,C4.5 模型和SVM 模型介于两者之间。说明半监督学习SVM 制动意图识别模型的分类精度是最高的,其平均值达到了0.941。并且半监督学习SVM 模型的KIA曲线比较平缓,说明半监督学习SVM 制动意图识别模型的稳定型较好,每次训练的差异性较小。 图11 不同识别模型的KIA 变化曲线 针对制动意图识别过程中准确率低的问题,提出一种基于半监督学习SVM 制动意图识别方法,并通过实车采集的数据对该模型进行了验证获得以下结论: (1)以制动踏板力、制动踏板行程、制动减速度为特征参数构建了制动意图识别模型,并将制动意图分为低强度制动、中强度制动、高强度制动。 (2)在训练的数据中加入了大量未标记的数据,解决了现实中缺乏标记数据的问题,实现了在少量标记数据下进行高效精准的制动意图的识别。采用半监督学习SVM 方法,通过对未标记数据分配“伪标签”并计算其置信度,从而将置信度高的数据扩充到训练集中,实现数据的高效利用。 (3)通过实验采集的数据对所构建的半监督学习SVM 制动意图识别模型进行验证。结果表明,半监督学习SVM 制动意图识别模型的识别准确率高于C4.5、ELM 和SVM 模型,其中对低强度制动、中强度制动、高强度制动的识别正确率分别为99.3%、91.6%、98.2%,平均为96.4%,大大提高了制动意图识别的准确性。3 模型验证与结果分析
4 结论
