中小型ISR无人机海战场的运用与关键技术分析
2023-07-20温亮孙晓路卫国华吕建平王波
温亮 孙晓路 卫国华 吕建平 王波


摘要:无人机是海上航空侦察的重要手段之一, 是未来海战场获得制信息权、 制空权的主要侦察力量。 通过梳理国内外海上中小型无人机的型号和属性特点, 对中小型ISR无人机在海战场的运用模式和运用优势进行了研究, 探讨了中小型ISR无人机应用于海战场所面临的问题, 并分析了发射与回收、 自主控制、 任务载荷、 通信链路、 平台设计等关键技术, 展望了中小型ISR无人机的发展趋势, 为中小型无人机在海上ISR领域的推广应用和规划发展提供了参考与思路。
关键词:无人机; 情报侦察监视; 海战场; 发射与回收; 自主控制; 任务载荷; 通信链路
中图分类号: TJ760; V279文献标识码:A文章编号: 1673-5048(2023)03-0049-07
DOI: 10.12132/ISSN.1673-5048.2022.0149
0引言
现代信息化条件下的高科技海上战争, 战场上的军事力量较量主要集中在信息权的争夺上。 无人机作为海上航空侦察的主要手段之一, 可以搭载光电、 雷达等传感器执行情报(Intelligence)、 监视(Surveillance)、 侦察(Reconnaissance)(ISR)任务, 为部队提供战场态势感知能力, 获取海战场情报, 正逐渐成为海战夺取制空权、 制信息权的主力。
中小型无人机作为海上无人机侦察力量的重要组成部分, 由于其机动、 灵活、 实时、 零伤亡、 效费比高等特点, 可以深入相关敏感海域进行全天候、 多方位、 大纵深的持续侦察与监视, 是海上航空侦察力量不可或缺的部分。 本文针对未来海战场信息对抗中的需求, 研究了中小型无人机在海上ISR领域的应用, 并对无人机相关的关键技术进行了分析, 从而探究无人机海战场的发展方向和技术壁垒, 有效挖掘无人机在海战场的运用能力, 为无人装备体系的建设和推动无人机体系作战概念的发展提供智力支撑。
1国内外海上中小型无人机发展现状
无人机在海湾战争、 伊拉克战争、 阿富汗战争等局部战争中的成功运用, 展示了其用于军事斗争的巨大潜力。 尤其在2020年阿塞拜疆对抗亚美亚尼的纳卡冲突中, 无人机大放异彩, 受到各军事强国的高度认可和重视, 纷纷加快研究无人机作战的步伐[1]。 美国是世界上较早开发无人机作战研究的国家, 拥有超过200个型号的军用无人机, 其研发和采购经费超过了世界无人机领域经费总支出的三分之二[2], 无人机技术一直走在世界的前列。 早在2013年, 美国国防部就发布了战略性纲要文件《無人系统综合路线图(2013-2038)》, 规划了美军各军种今后25年的无人机发展方向[3]; 2018年美国国防部又对无人系统综合路线图进行了更新, 将无人系统路线的规划时间延长至2042年, 主要聚焦无人平台的跨域作战、 互操作性、 自主性以及无人-有人协同作战[4], 将无人机从作战工具转变为作战伙伴。
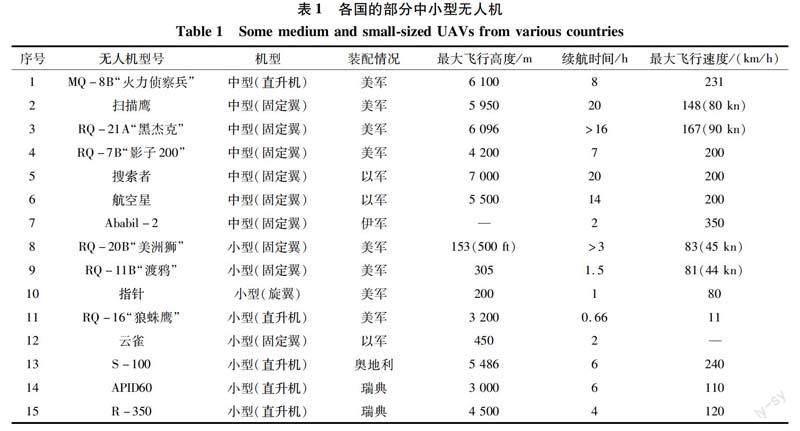
中小型无人机作为无人机系统的重要发展方向, 是目前海战应用最广、 装备最多的无人机。 以美国海军为例, 中小型无人机装备量约占无人机总装备量的90%以上[3], 而且随着信息技术、 人工智能技术、 传感器技术的不断发展和无人机平台的不断改善, 数量还在进一步增大。 中小型无人机通常是指短近程、 中程固定翼/旋翼无人机和无人直升机(活动半径小于200 km), 可执行战术侦察、 战术打击、 战前大面积侦察等任务, 是海上ISR领域备受瞩目的侦察力量。 早在海湾战争时期, 美国海军就利用“先锋”无人机为军舰上的火炮提供火力校正, 同时执行探测和搜寻水雷、 反潜、 侦察监视与搜救任务[5]。 在伊拉克战争中, 美军首次使用了“银狐”、 “阴影”和“龙眼”等小型无人机, 主要用于摧毁敌方通信系统、 扰乱对方通信情报, 并探测战场物理环境和进行通信中继[6]。 在其他现代局部战争中, 美军还使用了“沙漠鹰”、 “指针”、 “猎人”、 “影子”、 “扫描鹰”、 “整合者”等中小型无人机[7]。 目前, 美国海军和海军陆战队已装备或正在开发的中小型无人机包括RQ-12“黄蜂”、 RQ-20“美洲狮”、 RQ-11“渡鸦”、 MQ-11“航空探测器”、 “狼蛛鹰”、 “扫描鹰”、 RQ-7“影子”、 RQ-21A“黑杰克”、 MQ-8B/C“火力侦察兵”等无人机[8], 预计到2035年, 美国海军的无人机数量将会达到2 500多架[9]。 除美国之外, 以色列也是无人机强国, 军用无人机技术仅次于美国, 不仅供其国内军队使用, 还大量出口国外, 像纳卡冲突中, 阿塞拜疆使用的“赫尔墨斯”长航程侦察无人机、 “哈洛普”自杀无人机、 “搜索者”中程侦察无人机都出自以色列[10]。 其实, 在两次中东战争和以黎冲突中, 以军就已经将无人机广泛应用于战场侦察与监视, 并创新了各种无人机战术。 以色列现在拥有的中小型无人机包括“搜索者”、 “航空星”、 “斗牛骑士”、 “云雀”系列、 “竞技神”系列等无人机[11-13]。 英、 法、 俄、 德、 日等国, 虽然也开发了相应的军用中小型无人机, 但无人机技术相较于美以两国有一定距离。 表1对典型的中小型无人机进行了归纳。
2中小型ISR无人机在海战场的运用
中小型无人机因其独特的优势越来越受到海上作战部队的重视, 尤其在科学技术发展和海战军事应用需求的刺激下, 中小型无人机性能不断提高、 功能不断扩展、 作战能力不断增强, 逐渐从海上ISR领域的辅助装备发展成为不可或缺的必备装备, 是提升海上信息系统体系作战能力的关键要素, 将在未来海战中发挥巨大的作用。
2.1海上中小型ISR无人机的运用特点
相较于大型无人机和有人机, 中小型无人机在执行海上ISR任务时具备以下优势:
(1) 起降方便。 大部分水面舰艇由于船体空间的约束, 不适合大型无人机/有人机起降, 使得飞机远距离滞空时间受限。 中小型无人机体积小、 拆卸运输方便、 部署机动灵活, 可在条件简陋的甲板或岛礁等狭小场地起飞和降落。
(2) 隐蔽性好。 中小型无人机一般尺寸较小, 雷达散射面积小, 很难被搜索雷达探测到。 而且由于中小型无人机都是短近程、 中程无人机, 发动机的功率相对较小, 使得无人机的噪声小和红外辐射水平低, 不易被敌方发觉, 大大增强了执行任务的隐蔽性。
(3) 效费比高。 中小型无人机相较于大型无人机和有人机, 制造成本较低, 系统相对简单, 重量较轻、 维修方便、 可靠性好、 使用成本低, 且培训无人机驾驶员的时间和费用少, 使其具有较高的效费比。
(4) 作战分布性好。 由于中小型无人机机动灵活, 布置方便, 可将具有高价值、 多用途的平台作战能力, 如光电侦察、 电子信号获取、 雷达侦察、 通信中继、 电子干扰、 火力打击等能力分布布置到大量低成本、 效费比高的中小型无人机上, 通过合理利用作战资源, 形成作战能力协同倍增效应, 实现分布式作战效果。
(5) 可集群化作战。 中小型无人机成本低, 可大批量装备于海上作战部队, 通过相关战术可形成无人机集群作战能力, 完成ISR、 目标定位、 火力指引等任务。 而且, 由于各无人机小而分散, 敌方摧毁困难且攻击代价高, 即使被摧毁, 代价较低, 容易补充。
2.2海上中小型ISR无人机的运用样式
传统的水面舰艇侦察、 舰载直升机侦察完全满足不了海上作战部队对战场信息获取的需求, 中小型无人机因其独特的优势, 可以弥补其他海上情报搜集、 信息获取手段的不足, 提升海上情报体系的有效性、 完整性、 实时性, 为指挥员下决心、 做决策和执行行动计划提供强有力的支撑。 中小型无人机可以广泛应用于海上ISR领域, 主要体现在以下几个方面。
(1) 随舰侦察。 海上舰船尽管装有雷达、 光电、 水声探测等多种舰载侦察装备, 但由于受到地球曲率半径的影响及自身探测设备的限制, 其探测范围存在明显的局限性。 而中小型无人机可搭载相关传感器, 发挥居高临下的优势, 实施多批量、 长时间不间断侦察监视, 弥补舰船低空和超低空探测能力和范围的不足, 形成多维立体化情报网。
(2) 岛礁巡逻。 海上岛礁星罗棋布, 远离大陆。 采用传统舰船或有人机巡逻的方式对岛礁进行常态化监控的成本太高, 可使用中小型无人机搭配舰船巡逻的方式, 实施岛礁常态化巡逻, 从而加强对岛礁的管控能力。 同时, 可在岛礁上布署中小型无人机, 对大面积敏感海域实施持久、 实时的监控, 提高相关海域的监控与执法能力。
(3) 航空搜潜与探雷。 潜艇隐蔽性较好, 对舰、 对岸基军用设施威胁较大。 采用中小型无人机搭配磁探仪, 可以长时間对海域进行航空搜潜作业, 大大提高舰艇的反潜作战能力。 同时, 中小型无人机可搭配金属探测传感器, 实施海域扫雷作业。 由于探雷无人机体积小, 运输方便, 单艘扫雷舰艇可以携带多架无人机, 实施大范围的海域探雷作业, 大大提高扫雷效率, 而且可实现扫雷人员零伤亡。
(4) 舰船跟踪与定位。 通过侦察卫星等侦察设备发现敌方可疑舰船后, 若采用舰船跟随进行跟踪与定位, 容易暴露我方舰船的位置。 此时, 可以在超视距范围外发射小型无人机, 抵达相关海域后, 使用可见光、 红外或雷达侦察平台进行侦察与搜索, 发现目标后将目标锁定并持续跟踪, 同时将目标位置与侦察图像等数据传输给指挥站, 完成目标跟踪与定位任务。
(5) 目标指示与毁伤评估。 中小型无人机可搭载激光、 雷达等侦察设备, 为舰船的舰载火炮和导弹选定攻击目标, 同时及时提供目标的坐标、 方位、 速度等运动参数, 协助舰载火控系统完成目标分析和射击计算, 并使用激光指示器对目标进行指示, 实现舰载武器对目标的精确打击。 攻击过后, 无人机还可以对目标的毁伤效果进行评估, 协助指挥官决策是否进行再次攻击。
(6) 预警和通信中继。 由于大海宽广无垠, 海上通信资源较为有限, 而中小型无人机滞空能力强、 成本低, 可在海战场布置大量无人机携带通信控制系统、 雷达系统等通信载荷, 形成海上通信网络战节点, 为战区提供不间断的战场预警和通信中继能力, 提供传感器到传感器、 传感器到信息平台的传输途径, 并和卫星通讯系统、 舰载无线电通信系统、 水下通信系统构成海空天一体的立体化信息通信网络。
3海上ISR无人机关键技术分析
虽然中小型ISR无人机因其独特的优势受到世界各国海上作战部队的青睐, 但海上环境恶劣, 其存在起降平台危险较大、 智能化程度不够、 数据传输较慢、 任务载荷精度较低和平台抗腐蚀能力差等问题, 制约了中小型无人机在海战场的应用。
3.1发射与回收技术
海上大型无人机和有人机, 可在大型舰艇或岛礁机场有专用跑道起飞, 而中小型无人机的起飞面临的是舰艇甲板或岛礁的狭小场地, 且更易受到涌浪、 甲板风等环境因素的影响, 它的起飞一直是个难题。 而且, 大多数无人机起飞后, 在完成任务的同时, 为了实现其最大利用价值, 都会进行回收利用。 受平台的限制, 海上无人机着舰回收的安全性问题尤为突出。 有资料表明, 无人机回收过程的故障数占无人机整个执行任务故障总数的80%以上[14]。 因此, 海上中小型ISR无人机的发射与回收两大技术难题, 成为制约无人机海战运用的最主要因素。
目前, 海上中小型无人机的起飞方式主要有母机投放、 弹射起飞、 火箭助推起飞、 垂直起飞和手抛发射等(如图1所示)。 其中弹射起飞是利用很强的弹性元件的弹力作为动力, 为无人机提供起飞所需的加速度, 如美国“影子200”、 “扫描鹰”、 “黑杰克”, 英国的“不死鸟”, 以色列的“先锋”都采用此起飞方式[15-16]; 火箭助推起飞是借助固体火箭助推器, 从发射架将无人机助推起飞, 美国的“猎人”、 英国的“小猎鹰”和以色列的“哈比”无人机都采用这种起飞方式[17]; 垂直起飞技术能够让无人机垂直发射, 并具备空中悬停能力, 对跑道和其他发射装备无依赖, 适合各类型舰艇使用, 是目前无人机发射技术的研究重点, 大多数旋翼无人机和无人直升机都采用了这种方式, 还有少部分固定翼无人机, 如最新的美国“金眼”和俄罗斯“无风”-3无人机[18]。
海上中小型无人机的回收方式主要包括垂直降落、 伞降回收、 撞网回收、 天钩回收(撞绳回收)、 舰面降落和侧臂回收等, 如图2所示。 其中, 伞降回收是无人机通过降落伞落到海面, 工作人员进行打捞回收。 大部分小型无人机都适合这种回收方式, 但是需要无人平台具有防水能力, 且打捞过程较为麻烦[19]; 撞网回收是通过舰面无线电引导, 将无人机引入阻拦网内进行回收的方式, 美国的“银狐”、 “美洲狮”和以色列的“先锋”、 “侦察兵”无人机都采用这种回收方式[20]; 天鉤回收又称为单垂阻拦回收, 是通过装在无人机上的自锁挂钩锁定在阻拦索上进行回收, 2004年首次应用于“扫描鹰”无人机[21]; 侧臂回收是一种能发射和回收质量达500 kg无人机的小型机械装置, 可实现无人机安全发射和受控减速回收, 兼容当前和未来的战术无人机, 特别适合海上平台。 2016年12月, 美国极光科学公司成功进行了回收测试, 但是此回收技术还有许多技术难点尚未完全攻破, 比如回收阶段的航迹规划与自主控制能力等[22], 所以侧臂回收技术仍处于实验测试阶段, 目前还未应用于现役无人机[23]。 需要注意的是, 海上中小型无人机的回收特别依赖舰船的无线电引导系统, 它需要引导系统精确平稳地指引无人机进入设置好的回收区域, 实现成功回收。 表2列举了几种典型海上中小型无人机的起飞与回收方式。
3.2自主控制技术
无人机系统能够完成人类通过人机交互布置给它的任务, 最核心的技术是自主控制技术, 即无人机系统具有自主性, 拥有感知、 认知、 分析、 通信、 规划、 决策以及执行的能力。 针对指定任务, 无人机通过态势感知与分析、 自主学习与决策, 在最小化人为参与的情况下, 优质高效完成任务。 自主控制技术得益于目前蓬勃发展的人工智能技术, 主要涉及态势感知技术、 智能规划技术、 自主决策技术以及协同技术。
态势感知技术是无人机系统理解并适应环境的能力。 为了适应复杂不确定的战场环境, 无人机须具备对战场环境的感知、 认知与理解, 这意味着无人机能够融合多种传感器的数据信息, 自主对周围战场环境进行建模, 并通过对数据计算、 分析与处理, 完成环境特征提取、 目标识别、 态势评估、 状态估计等, 将数据转换成有用的情报, 服务于后期的决策过程。 2021年, Yamanouchi等人提出了一个3D悬垂系统, 该系统可以使无人机基于着陆场景和飞行经验, 实现对周围环境的智能感知[24]。
智能规划技术是无人机实现智能飞行的关键技术。 无人机在执行任务时, 可以根据任务的地点, 智能规划最适合的飞行航线, 并能有效避开威胁, 防止碰撞, 而且可以根据作业环境态势的变化以及任务的改变, 实时或近实时地修改与重新制定系统的任务路径, 智能完成任务的航迹规划和重规划。 例如, 采用离线训练-在线规划框架的基于DDPG智能规划技术的无人机, 可高效稳定运行, 能适应未知连续高维的环境态势, 具有较强的智能规划性能[25]。 2021年, Liu等人提出了基于蚁群算法的无人机自主规划技术, 有效提高了无人机智能路线规划和飞行的能力[26]。
自主决策技术是无人机系统能够自主做决定、 下决心的技术, 可以使无人机实现更高的自主性。 但目前该技术仅限于无人机系统的任务设定及任务分配、 处理、 利用和分发等过程。 例如, 2021年, 针对多无人机协同的自主决策问题, Ma等人结合双甲骨文与临近搜索算法, 提出DO-NS算法, 加快了数据计算时间并提高了系统决策质量, 从而有效改善了无人机的自主决策能力[27]。 但是, 对于指挥过程中是否放开机器自主决策存在诸多风险, 争议较大, 鉴于目前的智能技术, 需要慎重考虑。
协同技术是无人机系统与其他有人/无人系统协作的能力。 无人机在与其他系统进行协同作战、 集群作战时, 需要通过信息共享、 任务冲突消解、 任务分配来提供相互协作能力, 使无人机系统编队协调其活动, 在不需要人类的监督下, 实现共同的目标。 这种协同技术将带来无人机系统控制方式的转变, 即从以前直接对单个无人机的控制转变为编队制定战略决策, 是未来无人机系统重要的发展技术之一[28-29]。
虽然随着人工智能技术的发展, 无人机的智能化程度越来越高, 但距离独立于操作者的管理和自我管理的真正自主性还很远。
3.3任务载荷技术
无人机系统能执行侦察、 监视、 电子对抗、 目标跟踪、 作战效能评估等任务很大程度得益于无人机的任务载荷, 主要是各类通用的传感器, 如光电、 雷达、 信号、 生化、 气象传感器等。 无人机系统的作战效能不仅取决于无人机平台的性能, 更多的是取决于任务载荷技术。 任务载荷除了必须满足无人机尺寸、 重量、 能耗、 隐身等装机要素约束外, 还必须具备成本低、 分辨率高、 探测远、 应用灵活方便等属性要求。 无人机的任务载荷技术主要包括以下几类。
(1) 可见光探测技术。 其主要涉及电磁波的可见光波段, 此类探测技术成像分辨率高, 提供的图像直观、 清晰, 是其他传感器技术无法比拟的, 而且以被动探测为主, 隐蔽性好, 抗电磁干扰性强。 但在传播过程中易受到雨、 雪、 雾、 风等不良天气的形象。 所以, 在气象环境比较好的情况下, 可见光探测是无人机执行近距离侦察、 监视的最佳选择。 如采用光学透雾与电子透雾两种方法相结合, 可以增强图像成像质量和增大作用距离, 实现无人机的超视距观测[30]。
(2) 红外探测技术。 其主要涉及电磁波的红外波段, 此类探测技术探测距离较近, 成像模糊, 且极易受环境温差的影响, 但不受恶劣天气影响, 且可以探测隐身目标, 特别适合无人机夜间执行ISR任务。 红外探测技术通常会和可见光、 激光探测技术组合成光电综合探测设备。 例如, 2020年, 以色列拉斐尔公司推出了微晶(Microlite) 轻型紧凑式光电/红外成像系统, 可执行全天候广域持续监视任务[31]。
(3) 雷达成像技术。 其主要是指合成孔径雷达(SAR)技术, 涉及电磁波的微波波段。 相较于光电探测技术, SAR雷达能在夜间或能见度极低的天气条件下工作, 以高分辨率进行大面积成像侦察, 但是重量大、 功率高, 只适合大型无人机装载使用。 随着无线电天线技术和信号处理装备的小型化发展, SAR雷达可装备于中小型无人机。 例如, 2022年, Khosravi等人提出了基于无人机SAR图像的分类数据处理技术, 有效改善了SAR雷达的成像质量[32]。
无人机任务载荷种类较多, 有各自的优缺点。 为了适应未来海战的多样化作战需求, 无人机的任务载荷需进行模块化设计, 即无人机可根据执行任务的不同, 选择不同、 最适合的任务载荷, 实现无人机的“一机多用”, 任务载荷的“即插即用”。
3.4通信链路技术
无人机通信链路技术是无人机开发的重要技术之一, 其是连接无人机与各类作战平台的纽带, 是无人机成功完成任务的保障。 无人机在执行任务时, 各类任务载荷产生大量的图像情报、 声像情报和信号情报, 此时需要通信网络将这些情报信息实时、 快速、 安全地传回数据中心, 以便形成有用的综合情报, 供指挥员决策使用。 在无人机协同作战、 集群作战中, 无人机与有人机之间、 无人机之间、 无人机与水面作战系统之间、 无人机与陆地作战系统之间必须进行有机协调, 实现无人机与各作战平台、 指挥系统之间的互联互通互操作, 此时同樣需要高带宽、 大容量、 快速的通信网络系统进行数据传输与通讯。 可以说, 通信网络系统是无人作战系统的血脉, 其的好坏直接决定了整个作战系统的运行畅通与否。
为了应对无人机多样化的作战, 提高通信链路的带宽与容量, 各类新技术应运而生, 包括分布式动态多址技术、 实时鲁棒宽带传输技术、 多跳网络节点信息交换传输策略等。 其中, 针对无人机集群作战通信, 研究者提出了一种无人机集群自组网通信技术, 其是一种动态自组织无线通信网络技术, 具有网状分布、 无中心、 自组织、 远距离、 准定位等技术优势[33-35]。 可以支持群内任意节点的动态加入和退出, 满足无人机集群在大规模、 高移动动态情况下的协同通信需求。
3.5平台设计技术
海上作战环境不同于陆地, 海上无人机平台的设计也不同于陆基无人机, 设计时还需要注意以下几方面。
(1) 抗腐蚀设计。 海洋环境高温、 高湿、 高盐雾, 容易导致机械部件生锈破坏以及电子电器短路失效, 从而影响无人机的可靠性和使用寿命。 因此, 在设计海上无人机时需考虑无人机的抗腐蚀性。 目前常用的防腐蚀措施是为无人机部件喷涂耐腐蚀材料或加装防护装置[36], 当然这也会带来重量增加、 散热不畅等问题。
(2) 气动载荷设计。 海上环境风大且频繁。 中小型无人机速度低、 质量轻、 翼展小、 升力大, 飞行易受到阵风的影响。 海上无人机设计时, 需要考虑无人机的气动载荷能力, 以结构轻量化为目标, 综合无人机的气动特性、 设计寿命、 控制操作方式等进行气动载荷设计, 从而达到最优的无人机综合性能。
(3) 抗沉没设计。 无人机在海上作业时存在一定程度的落水可能性, 而且有些海上无人机是通过海面降落进行回收的。 为了最大程度地提高无人机的生存力、 使用寿命, 确保任务设备安全, 海上无人机设计时需考虑抗沉没设计, 如采用闭孔泡沫夹心结构、 独立水密舱设计等[37]。
综合分析可知, 未来海上中小型ISR无人机的发展方向更多强调无人平台设计的可靠性以及发射与回收的可行性, 以便适应海上战场环境; 重点开发无人机自主性、 数据链路鲁棒性, 实现互联互通互操作性, 以便发展有人-无人与无人-无人协同作战、 集群化作战; 重视提升无人机任务载荷能力, 以便满足海上多样化作战的需求。
参考文献:
[1] 苏润丛, 向文豪, 缪国春, 等. 纳卡冲突中无人机的作战应用与分析[J]. 飞航导弹, 2021(1): 65-70.
Su Runcong, Xiang Wenhao, Miao Guochun, et al. The Combat Application and Analysis of UAV in the Naqqa Conflict [J]. Aerodynamic Missile Journal, 2021(1): 65-70.(in Chinese)
[2] 祁圣君, 井立, 王亚龙. 无人机系统及发展趋势综述[J]. 飞航导弹, 2018(4): 17-21.
Qi Shengjun, Jing Li, Wang Yalong. Overview of Unmanned Aerial Vehicle Systems and Development Trends [J]. Aerodynamic Missile Journal, 2018(4): 17-21.(in Chinese)
[3] DoD Unmanned Systems Integrated Roadmap FY2013-2038 [EB/OL].(2013-12-31)[2022-06-01]. https:∥publicintelligence.net/ dod-unmanned-systems-2013/.
[4] Unmanned Systems Integrated Roadmap FY2017-2042[EB/ OL].(2018-08-30)[2022-06-01].https:∥assets.documentcloud.org/documents/4801652/UAS-2018-Roadmap-1.pdf.
[5] 苗秀梅. 國外舰载无人机技术的发展动向与分析[J]. 舰船电子工程, 2013, 33(12): 18-22.
Miao Xiumei. Development Trend and Analysis of the Ship-Based UAV Technology Abroad[J]. Ship Electronic Engineering, 2013, 33(12): 18-22.(in Chinese)
[6] 杨志钱, 梁光建. 美军无人机侦察技术应用[J]. 数字通信世界, 2020(6): 235-236.
Yang Zhiqian, Liang Guangjian. The Application of UAV Reconnaissance Technology of US Army [J]. Digital Communication World, 2020(6): 235-236.(in Chinese)
[7] 于力, 马振利, 江宝城. 外军军用无人机体系现状及发展趋势[J]. 飞航导弹, 2020(5): 34-39.
Yu Li, Ma Zhenli, Jiang Baocheng. The Current Status and Deve-lopment Trend of Foreign Military UAV Systems [J]. Aerodynamic Missile Journal, 2020(5): 34-39.(in Chinese)
[8] 李浩, 薛俊杰, 王晗中. 美军ISR无人机系统现状及其发展趋势[J]. 飞航导弹, 2020(1): 76-82.
Li Hao, Xue Junjie, Wang Hanzhong. The Current Situation and Development Trend of US ISR UAV Systems [J]. Aerodynamic Missile Journal, 2020(1): 76-82.(in Chinese)
[9] Volpe National Transportation Systems Center. Unmanned Aircraft System (UAS) Service Demand 2015-2035: Literature Review & Projections of Future Usage [EB/OL].(2013-09-28) [2022- 06-01].https:∥fas.org/irp/program/collect/service.pdf.
[10] 吴静, 蔡海锋, 刘俊良. 纳卡地区冲突无人机攻防运用分析及地空反无人对策建议[J]. 现代防御技术, 2021, 49(3): 13-20.
Wu Jing, Cai Haifeng, Liu Junliang. Analysis on the Operation of Attack and Defense of UAVs in Naka Conflict and Suggestions for Ground-to-Air Anti-UAVs[J]. Modern Defence Technology, 2021, 49(3): 13-20.(in Chinese)
[11] 张亚, 丁刚, 吴素彬. 以色列中空长航时战术无人机系统研究[J]. 飞航导弹, 2020(9): 80-84.
Zhang Ya, Ding Gang, Wu Subin. Research on Israels Medium Altitude Long Endurance Tactical Unmanned Aerial Vehicle System [J]. Aerodynamic Missile Journal, 2020(9): 80-84.(in Chinese)
[12] 杨梅枝, 李伟业. 以色列军队无人机发展现状及基本经验[J]. 飞航导弹, 2021(3): 53-56.
Yang Meizhi, Li Weiye. Current Development Situation and Basic Experience of Israeli Army UAV [J]. Aerodynamic Missile Journal, 2021(3): 53-56.(in Chinese)
[13] 侯荷洁, 岳晨. 以色列新质作战力量建设初探[J]. 国防, 2019(10): 71-75.
Hou Hejie, Yue Chen. A Preliminary Probe into the Development of Israels New Combat Capabilities[J]. National Defense, 2019(10): 71-75.(in Chinese)
[14] 董晓明. 海上无人装备体系概览[M]. 哈尔滨: 哈尔滨工程大学出版社, 2020: 88.
Dong Xiaoming. Introduction to Maritime Unmanned Systems[M].Harbin: Harbin Engineering University Press, 2020: 88.(in Chinese)
[15] Yang S, Hou L, Tang L W, et al. Research on UAV Catapult Take-Off and Collision Recovery Technology [C]∥ IEEE Chinese Guidance, Navigation and Control Conference, 2016.
[16] 王湘, 吳峻, 孟庆富. 一种无人机连发型电磁弹射系统的设计[J]. 火力与指挥控制, 2021, 46(4): 141-146.
Wang Xiang, Wu Jun, Meng Qingfu. Design of a Continuous Electromagnetic Ejection System for UAV[J]. Fire Control & Command Control, 2021, 46(4): 141-146.(in Chinese)
[17] 陈刚. 无人机单(双)火箭助推发射安全性对比分析[J]. 兵器装备工程学报, 2021, 42(8): 27-32.
Chen Gang. Comparative Analysis of UAV Launching Safety by Using Single or Double Solid-Rocket Booster[J]. Journal of Ordnance Equipment Engineering, 2021, 42(8): 27-32.(in Chinese)
[18] 曹浩楠, 黄建峰, 安城辉, 等. 固定翼无人机发射与回收技术发展综述[J]. 科技创新导报, 2017, 14(31): 20-22.
Cao Haonan, Huang Jianfeng, An Chenghui, et al. A Review of the Development of Fixed-Wing UAV Launch and Recovery Technology [J]. Science and Technology Innovation Herald, 2017, 14(31): 20-22.(in Chinese)
[19] 王童, 邢健健, 张文君, 等. 小型无人机伞降回收与失控保护系统的研究[J]. 科技风, 2017(8): 22.
Wang Tong, Xing Jianjian, Zhang Wenjun, et al. Research on Parachute Recovery and Runaway Protection System of Small Unmanned Aerial Vehicle [J]. Technology Wind, 2017(8): 22.(in Chinese)
[20] 金泉. 可控阻尼无人机撞网回收装置[D]. 南昌: 南昌航空大学, 2019.
Jin Quan. Controllable Damping of Net-Recovery Device for Unmanned Aerial Vehicle(UAV)[D]. Nanchang: Nanchang Hangkong University, 2019.(in Chinese)
[21] 李凯. 小型舰载无人机弹射起飞与天钩回收技术研究[D]. 南京: 南京航空航天大学, 2019.
Li Kai. The Research of Ejection Takeoff and Skyhook Technology of Small UAVs[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2019.(in Chinese)
[22] Shi H Y, Lu Y F, Hou Z X, et al. 3D Dubins Net-Recovery Path Planning for Fixed Wing UAV[C]∥ Chinese Control and Decision Conference (CCDC), 2018 : 604-610.
[23] 鲁亚飞, 陈清阳, 王鹏, 等. 中小型固定翼无人机精确回收技术发展与关键技术分析[J]. 飞航导弹, 2020(4): 59-65.
Lu Yafei, Chen Qingyang, Wang Peng, et al. The Development and Key Technology Analysis of Precision Recovery Technology for Small and Medium-Sized Fixed-Wing UAVs [J]. Aerodynamic Missile Journal, 2020(4): 59-65.(in Chinese)
[24] Yamanouchi T, Urakawa G, Kashihara S. UAV 3D-Draping System for Sharing Situational Awareness from Aerial Imagery Data[C]∥ IEEE Global Humanitarian Technology Conference, 2021: 229-232.
[25] 赵家乐, 岳龙飞, 左家亮, 等. 基于DDPG的多无人机压制敌防空作战智能规划[J/OL]. 电光与控制. [2022-06-01].https:∥kns.cnki.net/kcms/detail/41.1227.tn.20220507.1453.002.html.
Zhao Jiale, Yue Longfei, Zuo Jialiang, et al. Intelligent Planning of Multi-UAVs Suppression of Enemy Air Defense Combat Based on DDPG Algorithm[J/OL]. Electronics Optics & Control. [2022-06-01].https:∥kns.cnki.net/kcms/detail/41.1227.tn. 20220507.1453.002.html.(in Chinese)
[26] Liu H, Zhang N, Li Q. UAV Path Planning Based on an Improved Ant Colony Algorithm[C]∥ 4th International Conference on Intelligent Autonomous Systems (ICoIAS), 2021: 357-360.
[27] Ma Y Y, Wang G Q, Hu X X, et al. Cooperative Occupancy Decision Making of Multi-UAV in Beyond-Visual-Range Air Combat: A Game Theory Approach[J]. IEEE Access, 8: 11624-11634.
[28] 趙林, 张宇飞, 姚明旿, 等. 无人机集群协同技术发展与展望[J]. 无线电工程, 2021, 51(8): 823-828.
Zhao Lin, Zhang Yufei, Yao Mingwu, et al. Development and Trend of UAV Swarm Cooperative Techniques[J]. Radio Engineering, 2021, 51(8): 823-828.(in Chinese)
[29] 柳文林, 潘子双, 韩维, 等. 有人/无人机协同作战运用研究现状与展望[J]. 海军航空大学学报, 2022, 37(3): 231-241.
Liu Wenlin, Pan Zishuang, Han Wei, et al. Research Review and Prospect on the Application of Manned/Unmanned Aerial Vehicle Cooperative Combat[J]. Journal of Naval Aviation University, 2022, 37(3): 231-241.(in Chinese)
[30] 刘晓敏, 邢琳, 张圣仟. 超视距可见光探测系统设计[J]. 光电技术应用, 2021, 36(2): 14-17.
Liu Xiaomin, Xing Lin, Zhang Shengqian. Design of Optical Over-the-Horizon Visible Light Detection System[J]. Electro-Optic Technology Application, 2021, 36(2): 14-17.(in Chinese)
[31] Rafael Advanced Defense Systems. Rafael Unveils Microlite Airborne EO/IR System [EB/OL]. (2020-02-10)[2022-06-01]. https:∥www.jointforces.com/defence-equipment-news/29455-rafael-unveils-microlite-airborne-eo-ir-system.
[32] Khosravi M R, Samadi S. Mobile Multimedia Computing in Cyber-Physical Surveillance Services through UAV-Borne Video-SAR: A Taxonomy of Intelligent Data Processing for IoMT-Enabled Radar Sensor Networks[J]. Tsinghua Science and Technology, 2022, 27(2): 288-302.
[33] 徐义桂, 陈维义, 吕玉萍. 无人机集群作战通信自组网的关键技术探讨[J]. 无线互联科技, 2019, 16(2): 1-2.
Xu Yigui, Chen Weiyi, Lü Yuping. Discussion on Key Technologies of UAV Cluster Combat Communication Ad Hoc Network[J]. Wireless Internet Technology, 2019, 16(2): 1-2.(in Chinese)
[34] Pai V U, Sainath B. UAV Selection and Link Switching Policy for Hybrid Tethered UAV-Assisted Communication[J]. IEEE Communications Letters, 2021, 25(7): 2410-2414.
[35] Chang B, Tang W, Yan X Y, et al. Integrated Scheduling of Sensing, Communication, and Control for mm Wave/THz Communications in Cellular Connected UAV Networks[J]. IEEE Journal on Selected Areas in Communications, 2022, 40(7): 2103-2113.
[36] 段国晨, 赵景丽, 赵伟超. 先进复合材料在无人机结构的应用[J]. 纤维复合材料, 2022, 39(2): 105-114.
Duan Guochen, Zhao Jingli, Zhao Weichao. Application of Advanced Composite Materials in UAV at Home and Abroad[J]. Fiber Composites, 2022, 39(2): 105-114.(in Chinese)
[37] 何国卫. 水密舱壁: 中国特色的古船结构[J]. 中国船检, 2018(7): 98-103.
He Guowei. Watertight bulkhead: Ancient Ship Structure with Chinese Characteristics [J]. China Ship Survey, 2018(7): 98-103.(in Chinese)
Application and Key Technology Analysis of Small and Medium-Sized ISR
UAVs in the Field of Maritime
Wen Liang*, Sun Xiaolu, Wei Guohua, Lü Jianping, Wang Bo
(China Coast Guard Academy, Ningbo 315801, China)
Abstract: Unmanned aerial vehicle (UAV) , which is one of the significant means of maritime and aviation reconnaissance, is recognized as the main reconnaissance force to obtain information control and air control in the future sea battlefield. By combing the models and attribute characteristics of foreign small and medium-sized UAVs on the sea, this paper studies the application mode and application advantages of small and medium-sized ISR UAVs in the sea battlefield, and discusses their problems faced by the application, then analyzes the key technologies, such as launch and recovery, autonomous control, mission load, communication link, platform design, finally looks forward to their development trend. This paper provides reference and ideas for the popularization, application and planning development of small and medium-sized ISR UAVs in the field of maritime.
Key words: UAV; ISR; sea battlefield; launch and recovery; autonomous control; mission load; communication link
收稿日期: 2022-07-16
基金項目: 国家自然科学基金项目(61871244)
*作者简介: 温亮(1984-), 男, 江西赣州人, 副教授。
