一种基于抗差自适应的交互式多模型定位算法
2023-06-16田步高刘杰民
田步高,程 龙,2,∗,刘杰民,2
(1.东北大学秦皇岛分校 智能信息处理与微波技术重点实验室,河北 秦皇岛 066004;2.东北大学秦皇岛分校 计算机与通信工程学院,河北 秦皇岛 066004)
0 引言
随着全球定位系统的发展,无线定位技术变得越来越重要。与此同时,对精确定位的需求也在增长。基于无线传感器网络的定位技术因其独特的低能耗、便携性、准确性和对地形的适应性而备受关注,尤其是在室内环境中,在环境监测和应急服务等大量领域,学者们围绕基于无线传感器网络的定位进行了广泛的研究,并产生了丰富的学术成果。
当前最常用的定位算法之一是基于距离的定位。不同的传感器节点将提供不同的测量数据,主要包括到达时间(Time of Arrival,TOA)、到达时间差(Time Difference of Arrival,TDOA)、到达角(Angle of Arrival,AOA) 和接收信号强度指示(Received Signal Strength Indicator,RSSI)。上述方法的测量包含不同的信息并且具有不同的信号特性。通过获得这些测量值中的一个或多个,结合几何关系,可以实现初步的无线定位。
然而,由于无线环境是粗糙的,对于室内来说单独使用任何一种无线测量方法,提高移动位置估计的准确性仍然是一个非常困难的问题。为了解决这个问题,学者们提出了通过结合数据融合技术来提高精度的移动位置估计。例如使用TOA/AOA、TDOA/AOA 或TOA/TDOA/AOA 的数据融合技术来估计移动位置。
本论文介绍的算法建立在RSSI 和TOA 的数据融合基础上,但由于信道状态未知,受非视距效应的影响,传播路径中的各种信号损失将导致结果与欧几里德距离产生较大偏差。因此,本文将研究重点放在包含不同程度非视距的环境中的精确定位上。
卡尔曼滤波作为一种线性最优估计算法,在无线网络定位领域已经得到了广泛的应用,但为解决大多数的非线性问题,又衍生出了扩展卡尔曼滤波算法。针对卡尔曼滤波模型的实际应用中模型拟合导致的动力学模型与观测模型之间产生误差,进而使无线定位解偏离真实值的问题,学者们先后提出了自适应滤波和抗差滤波的方法:杨元喜提出了两段、三段自适应函数的IGGⅢ抗差方法[1-2],文献[3-4]应用了新的抗差估计方法,在IGGⅢ方案的基础上构建了新的等价权函数。文献[5]采用了IGGⅢ构造的新的权函数和标准卡尔曼滤波新息辅助异常检测的双重检测策略。上述方法均提升了卡尔曼滤波器的精度以及稳定性,但只适用于提供观测信息较充足时的情况,在实际应用中有所欠缺。
也有学者提出了新的自适应抗差方法和应用[6-9],选择构建不同形式的抗差自适应因子控制异常观测,抑制观测噪声对无线定位解算精度的影响。文献[10]利用了基于伪距残差的GNSS 定位先验质量评估作为选择滤波类型和抗差因子的依据。文献[11]则提出了一种基于牛顿插值的抗差估计方法,利用先前时刻的噪声值组成牛顿插值多项式,进而进行外延从而得到当前的观测噪声值。文献[12]在单个历元内利用两次判别法在标准卡尔曼滤波、抗差滤波和自适应滤波中选择当前最优滤波解。
此外,为了获得正确的系统状态估计,许多学者提出并改进了交互式多模型算法(Interacting Multiple Model,IMM),用于非线性滤波算法[13-14],如,TOA/RSSI 的数据融合,以估计移动位置,提高定位精度。文献[15]提出了一种交互式多模型集滤波算法,改善了传统交互式多模型固定结构所带来的模型竞争和运算速度降低等问题。文献[16]通过模型集自适应调整实时修正模型转移概率,提高了模型正确匹配效率;文献[17]在此基础上利用判定窗对模型转移概率进行二次修正,提升了模型的响应速度。除此之外,也有学者将超宽带(Ultra Wind Band,UWB)技术引入了交互式多模型[18]中,具有实际指导意义。
以上有关抗差自适应卡尔曼滤波以及交互式多模型的研究具有一定的理论意义和工程实践应用价值,但是,在存在非视距效应的复杂环境下的定位精度仍有待提高,针对此问题,本文提出了一种基于抗差自适应的扩展卡尔曼交互式多模型定位算法。本算法表现出了良好的控制效果和对非视距效应的抑制性能,且经过仿真实验证明,与经典简单交互式多模型相比,定位精度有了较高的提升。
1 系统状态模型
假设在室内环境中的无线电信息传输情况下,k个基站(Base Station,BS)从移动站(Mobile Station,MS)中检测到的距离信号环境(x0(0),y0(0))是设时间为n时MS 的位置坐标。
在视距条件下,在n个BSk和MS 的TOA 数据与MS 之间对应的范围测量值rk(n)可以建模为
其中:k表示第k个移动站;dck(n),drk(n)表示从BSk到拐角和从MS 到拐角的真实距离;wdk(n)是TOA 的测量噪声,它被认定为是具有零均值,方差为σ2m的高斯白噪声。当非视距传输发生时,真实距离dk是从BSk到角和从角到MS 的距离之和。
功率测量Pk(n)和BSk与MS 在n时刻的测量数据对应的状态模型可以建模为
其中,视距条件下Pk,1可以建模为
同理,非视距条件下可以建模为
式中,wpk(n)是方差为σ2p的零均值的RSSI 测量噪声,g是范围为150~300 m 范围内的断点,参数a和b分别决定了断点位置和前后的斜率。
状态空间模型的静态模型建立如下:
Ts代表系统输入矩阵的采样周期,vk(n)为MS 加速度引起的过程驱动噪声。
2 抗差自适应交互式多模型算法
该算法的总体结构如图1 所示。在每个采样周期k中,在从传感器节点进行距离测量后,经过抗差自适应过程的重构并调节视距/非视距信任度,将处理后的数据发送到自适应抗差交互式多模型中。详细的位置信息将在下面进行描述。

图1 基于抗差自适应的交互式多模型算法流程Fig.1 Flowchart of interacting multi-model localization algorithm based on adaptive robust
2.1 抗差自适应扩展卡尔曼滤波
假定获得到的载体状态信息中存在粗差,针对粗差,自适应因子αk会降低异常动力学模型信息对滤波状态所造成的影响,同时进行交互式多模型中的载体模型信任度的适应性调节。假定检验得观测信息中存在粗差,抗差估计通过扩大异常观测协方差来减小粗差对参数估值的影响,同时会对观测信息进行适应性调节,即数据由标准扩展卡尔曼滤波模型进入到抗差自适应扩展卡尔曼滤波模型中。
2.1.1 观测向量自适应抗差
观测向量可以分为相关观测向量与不相关观测向量,此处假定每一次数据的测量均为独立测量,故为不相关观测,其协方差非对角线元素应为0,所以能够构建方差膨胀因子tk。
以锚节点BSk为例,在卡尔曼滤波中,新息可以定义为当前观测值与状态预测值之间的差值,表示为
当不考虑观测数据可能存在的粗差时,Vk应服从均值为零的正态分布:
式中,Hk表示观测矩阵,Qk表示测量误差协方差矩阵,具体值将会在后文给出。
当考虑观测数据存在粗差时,则可以利用Vk构造假设检验统计量[9]如下:
可利用新息向量构建假设检验为
Lk(n)遵循具有t个自由度的卡方分布。边界条件为Lk(n)=χ2α(t)。
在无线定位过程中,观测总误差通常会对同一时期的不同模型产生不同的影响。本文在观测协方差矩阵的不同维度上分别对假设进行了检验和判断。对于Lk,w(n)>L(0),认为观测向量的第w个数据通道包含粗差,引入方差膨胀因子对该通道进行差分处理:
令tk(n)= diag[tk,1,tk,2,…,tk,n],进而可以构建出等价权矩阵
当Lk(n)检测到观测数据存在粗差时,观测协方差矩阵Qk(n)将减小对应等价权矩阵,从而控制观测异常对状态参数估值的影响。
2.1.2 自适应因子
新息序列可以更直接地反映系统状态模型的误差,因此基于新息序列构建出以下误差识别判据[9]:
新息向量反映了状态预测与观测向量所得结果之间的差别。当动力学模型产生异常误差时,采用统一的自适应因子调整动力学模型信息对状态参数的整体贡献。
同时为了防止自适应因子归零情况下出现预测状态协方差矩阵奇异的情况,构建出以下两段函数自适应因子:
M是误差识别统计量的阈值,一般在系统误差的1.5~2.5 倍之间。
2.2 交互式多模型中的数据融合
视距/非视距的转换条件会使距离估计中出现严重的测量误差,且简单交互式多模型所使用的扩展卡尔曼滤波器不能产生良好的自适应调整,将导致无线定位解产生严重粗差并影响临近时刻解算结果。本文使用了一种基于抗差估计的先决自适应视距/非视距模型转换条件,可以有效减轻视距/非视距模式变化过程中产生的粗差对解算精度的影响:
按照下文模式匹配滤波过程和融合过程中的算法步骤进行状态距离估计。视距/非视距的模式转换被建模为一个双态马尔可夫跳跃过程,运动信号模型状态方程Xk由基于此过程的两个并行抗差自适应扩展卡尔曼滤波过程同时估计所得。在获得相应模式的状态估计之后,由模式状态估计和抗差自适应过程得出的误差分别在两个模式中通过似然函数来计算和更新其模式概率。在迭代过程中,模型将结合对应模式概率计算混合概率,在融合数据之前应用相应信道的滤波器得到对应先验状态估计,减小由视距/非视距的模型转换引起的误差。
所提出的算法的架构如图1 所示,数据融合过程主要涵盖三个阶段,即交互(混合)、滤波、判断和融合。以下讨论描述了所提出的交互式多模型结构。
1) 交互作用(混合)
来自上一时刻的多模式状态估计模型将会在此阶段混合,本文假设所有的转移概率都是已知的。从模式i到模式j的混合概率可以表示为
式中,Pk,i|j是BSk从模式i到模式j的马尔可夫转移概率,μk,i|j(n-1)是在时间n-1 时BSk在模式i下的概率,而是BSk的归一化因子,定义为
在n-1 时刻,BSk的第j个模式匹配滤波器(视距或非视距滤波器)的混合先验状态估计通过以下方式获得:
2) 模式匹配扩展卡尔曼滤波
在此阶段引入了非线性状态估计,并在此阶段更新了模式概率。根据上述状态方程公式(2)~(6),可以获得状态预测方程和状态协方差矩阵:
进一步即得到当前时刻的状态估计
其中:
式中,Qk=[wpk(n)wdk(n)]T为测量误差协方差矩阵。wpk(n)表示RSSI 数据测量噪声,后者表示TOA 过程测量噪声,Ka,k,j(n)为扩展卡尔曼滤波增益矩阵。
Hk,j表示对应第k个锚节点处于模式j下的观测矩阵,是对应展开后的一阶偏导项,将状态方程转化为近似线性化方程,即
将平滑范围预测误差的协方差矩阵E{ek,j(n)(n)}表示为
BSk的第j个模式匹配扩展卡尔曼滤波器的似然函数Λk,j(n)和模式概率μk,j(n)可以表示为
式中,N(ek,j(n);0,Sk,j(n))表示均值和协方差为零和Sk,j(n)的高斯密度函数。
式(27)的物理意义是,估计误差‖ek,j(n)‖与滤波器和模式的似然函数呈现反比关系。式(28)中更新的模式概率基于两种模型的马尔可夫转移概率和第j个模式匹配扩展卡尔曼滤波器的似然函数Λk,j(n)的加权。
3) 融合作用
通过其基于各自模式概率的模式匹配滤波器的结果,可以得到的BSk距离估计误差协方差矩阵和状态向量矩阵。它们可以用如下方式表示:
模态概率μk,j(n-1)是所提出的算法方案中相互作用的加权和状态估计的组合。最后,从估计的状态向量(k|k)中可以得到BSk的移动平滑距离估计。
2.4 数据输出和移动位置定位
使用基于抗差自适应的交互式多模型算法的估计结果是多个单独BS 和MS 之间的估计距离。这些估计距离(n)可用于获得MS 位置(x0(0),y0(0))。
MS 位置(x0(0),y0(0))与估计距离之间的关系在视距和非视距情况下分别为
每个方程只适用一种情况。它取决于相应的模式概率。对于BSk,视距的情况为μk,1(n) >μk,2(n)。
3 仿真实验
本文采取了与文献[14]相似的模拟仿真环境条件,并与之对比比较算法精度,使用MATLAB 作为仿真软件,建立一个600 m×600 m 的平面,分布有3 个信标节点,移动站x-y平面的移动轨迹为
其中,(vx,vy)表示移动站在x和y方向上的速度,(x0(0),y0(0))分别是MS 的初始坐标。假设车辆速度v在vx=5 m/s 或vy=5 m/s 时保持恒定,初始位置x0(0)= 0 m,y0(0)= 50 m。样本长度、样本间隔和总观察时间分别为500 m、0.2 s 和100 s。测量数据由真实距离和真实功率生成。
将测量噪声添加到真实距离以生成距离测量数据。假设距离中的测量噪声是一个白噪声,平均值为0,标准偏差Qm。假设信号衰减功率中的测量噪声为白噪声,平均值为0,标准偏差Qp。且假设噪声相互独立。
在真实室内无线电传播环境中考虑LOS/NLOS 转换情况。当MS 移动通过拐角时,每个BS都会发生视距/非视距转换。假设BS 的坐标为图2 中BS1(0,0)、BS2(-300,300)、BS3(300,300)。在此模拟中,假设车辆的稳定速度为18 km/h,因此可以选择较小的速度方差为1。误差准则阈值设置为均值的1.5~2.5 倍。

图2 预设室内传播环境模型Fig.2 Model of the preset indoor propagation environment
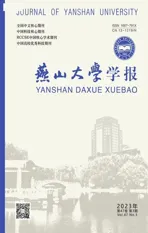
将该算法与基本的基于TOA 和RSSI 的简单交互式多重模型进行了精度比较。为了尽量减少意外因素的影响,在每种情况下进行了1 000 次蒙特卡罗运行,环境参数见表1。
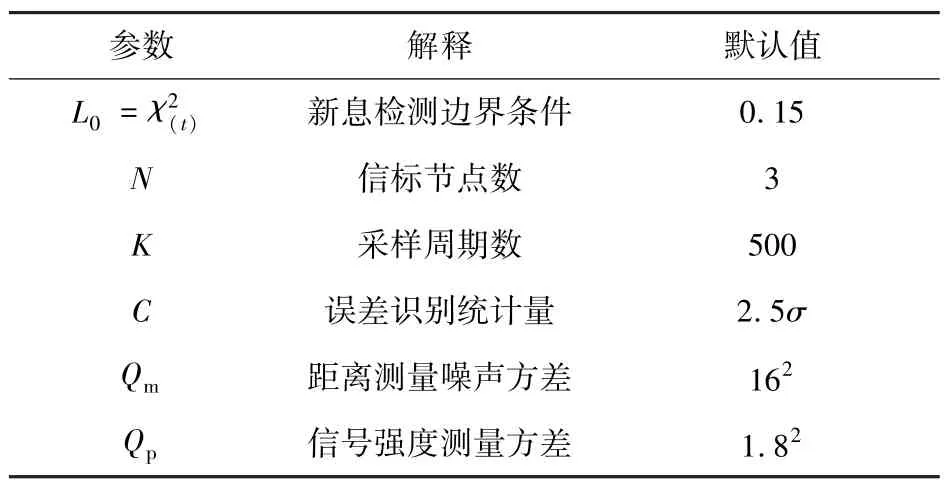
表1 环境参数Tab.1 Environment parameters
图3 显示了以BS1为例,实验环境中的锚节点的模式概率变化情况。非视距误差见表1,模拟仿真运动轨迹见图4 时,其在移动站运动过程中的视距、非视距转换概率变化情况。已知在移动站运动至拐角时会出现视距/非视距模型的变化,仿真实验也显示出了其概率变化统计,在拐角处产生了模型概率的变化且在短暂的波动后趋于了平稳。

图3 BS1 的模型概率变化Fig.3 Probabilistic variation of the BS1 model
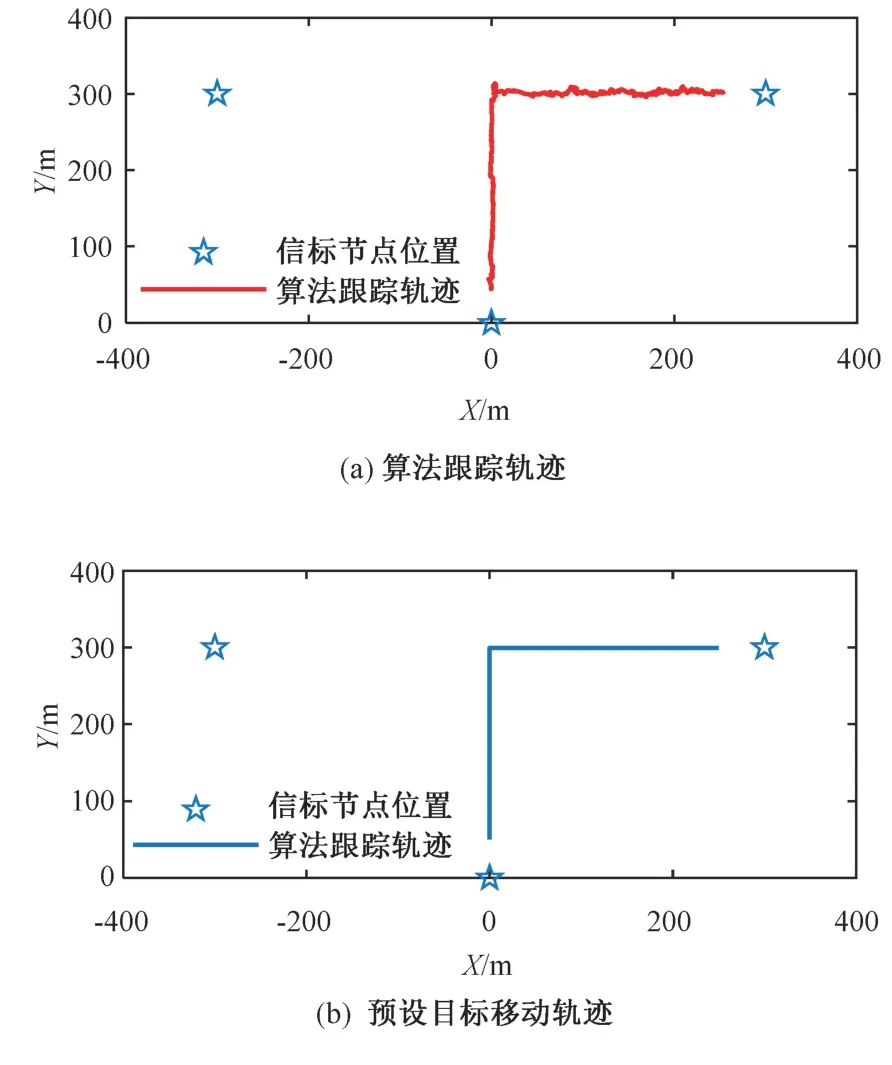
图4 预设非视距环境下的仿真轨迹Fig.4 Simulation trajectory in a preset non line of sight environment
图5 显示了二者均方根误差的数值,比较了本文提出的算法(图5(a))和对比简单交互式多模型算法(图5(b))。在Qm=162和Qp=1.82的条件下进行1 000 次蒙特卡罗运行,对比分析得本文的算法能够有效抑制粗差异,在运行中具有良好的稳健效果,显著优于对比交互式多模型算法。
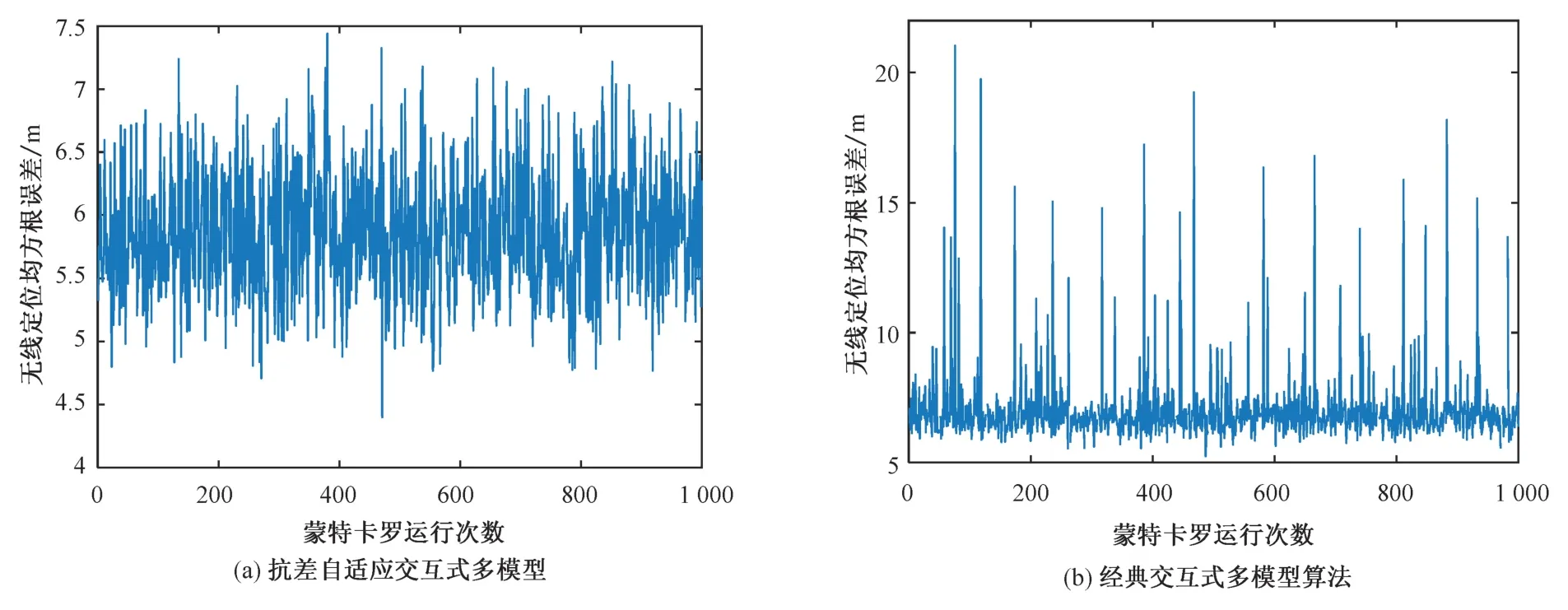
图5 蒙特卡罗运行下两种算法的均方根误差Fig.5 Root mean square error of the two algorithms in Monte Carlo operation
图6 显示了当非视距噪声的平均值从1 级(Qm=122,Qp=1.42)变化到9 级(Qm=202,Qp=2.22)时本文所提出的算法性能变化趋势,其中,距离测量方差每级数值提升1,信号强度测量方差每级数值提升0.1。可以看出,随着非视距程度的加深,二者都会失去一些精度,但本文的算法平均定位误差上升得相对缓慢。例如,当非视距误差为Qm=162和Qp=1.82时,本算法的定位均方根误差数值为5.830 2,而对比算法为7.141 3。在此情况下本文算法的准确度较对比交互式多模型算法在定位精度方面提高了18.36%。
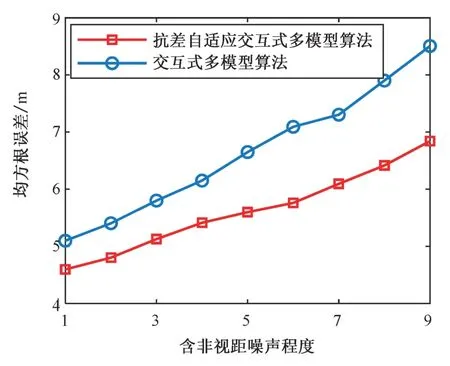
图6 不同非视距均值误差下的定位误差对比Fig.6 Comparison of positioning errors under different non-line-of-sight mean errors
4 结论
为了减少NLOS 噪声对无线定位的影响,提高无线定位的精度,本文提出了一种基于抗差自适应的交互式多模型算法。本文首先利用抗差自适应过程对粗差异引起的移动站基站通信信道的模式变化进行重构,并根据重构结果执行了非视距准则和缓解方法,平衡了交互式多模型中马尔可夫链中的模式信任平衡。仿真结果表明,与对比的交互式多模型算法相比,该算法在非视距环境下具有更高的精度和稳健性,能使误差控制在一个很小的范围内,具有较好的抗差效果。该算法提高了定位模型的稳定性和定位精度,易于工程实现,可以在实际粗糙的无线环境(例如室内传播环境)中精确地增强移动位置估计。