自动共享电动汽车的云-边协调优化模型与控制策略
2023-05-30徐嘉楠姜爱华
徐嘉楠 姜爱华

摘 要:针对自动共享电动汽车(shared autonomous electric vehicles,SAEV)运行出现的车辆分配不平衡以及充电优化问题,提出了一种基于云-边协调计算的SAEV优化控制策略。首先,给出SAEV再平衡优化模型以及再平衡任务分配算法;其次,考虑使用V2G和动态电价进行SAEV车队的充放电优化,给出SAEV车队能量交换模型以及出行订单分配算法,以减少整个SAEV车队系统的充电成本;再次,利用云-边协调通信将这些优化结果信息在不同平台间进行互动传输,实现电动汽车的最优充电与迁移策略;最后,通过MATLAB使用真实的深圳出租车数据对该优化控制方法进行验证。结果表明,该框架可降低充电成本,提高交通效率,有望扩展应用到更大规模的系统中。所提云-边协调控制策略将复杂的SAEV优化问题分解成3个子问题进行求解,为SAEV的最优运行提供了一种新的方法。
关键词:公路运输管理;自动共享电动汽车;云-边协调;再平衡;V2G;充电优化;需求响应
第一作者简介:
徐嘉楠(1997—),男,江西丰城人,硕士,主要从事自动共享电动汽车充放电方面的研究。
通信作者:
姜爱华副教授。E-mail:1261153682@qq.com
Cloud-edge coordinative optimization model and control strategy for shared autonomous electric vehicles
XU Jianan,JIANG Aihua
(School of Electrical Engineering, Guangxi University, Nanning, Guangxi 530004, China)
Abstract:Aiming at the problems of vehicle imbalance and charging optimization of shared autonomous electric vehicle (SAEV) operation, an optimal control strategy based on cloud-edge coordination calculation for SAEV was proposed. Firstly, a SAEV rebalancing optimization model and a rebalancing task allocation algorithm were proposed. Secondly, considering V2G and dynamic electricity price to optimize the charging and discharging of SAEV fleet, a SAEV fleet energy exchange model and a trip order allocation algorithm were proposed to reduce the charging cost of the entire SAEV fleet system. Then, the cloud-edge coordination communication was used to transfer these optimization results among different platforms, so as to realize the optimal charging and moving strategy of electric vehicles. Finally, the optimization control method was verified in MATLAB by using the real Shenzhen taxi data. The results show the framework can reduce the charging costs and improve the transportation efficiency, and is expected to be applied to larger scale of systems. The proposed cloud-edge coordinative control strategy divides the complex SAEV optimization problem into three sub-problems, and provides a new method and idea for the optimal operation of SAEV.
Keywords:highway transportation management; shared autonomous electric vehicles; cloud-edge coordination; rebalance; V2G; charging optimization; demand response
溫室气体排放增加导致全球气候变暖是当前国际社会普遍关注的问题,而交通运输系统所消耗的化石燃料是温室气体排放的主要来源。因此,能源消耗更少、温室气体排放更少、通行效率更高的绿色交通是当前城市出行的主流趋势。自动共享电动汽车(shared autonomous electric vehicles, SAEV)的发展是解决城市问题的新手段,它可以进一步提高车辆的移动性、安全性,以及城市交通的环保性。SAEV更容易控制和优化,作为柔性负荷提供辅助服务[1],实现快速、大规模的需求响应。此外,它还可以利用车到网(V2G)技术为电网提供一些额外的服务,如峰值发电、运行储备和调节[2],允许更深层次的电网整合,是实现汽车电气化潜在环境效益的基础[3]。
与往返式的共享汽车系统相比,单程式的共享汽车系统能够明显提高用车的灵活性[4]。然而,由于用户出行具有潮汐性和不平衡性[5],一个地区通往另一地区的流量与其反向通行的流量通常不相等,单程式的共享汽车系统会造成地区之间车辆分布不平衡,进而降低共享汽车系统的整体效率。因此,再平衡问题是实现SAEV优化的一个重要问题。再平衡过程将可以有效地将SAEV从车辆密集区域转移至车辆稀疏区域,进而平衡整个地区的车辆分布,减少乘客的等待时间。
研究人员在私人电动汽车充放电优化方面已经开展了许多研究,但是在为共享电动汽车设计充电和再平衡优化方面的工作十分有限,其研究主要集中在车辆运输方面,即通过优化车辆再平衡时间来最小化乘客的等待时间。文献[6]提出了一个模拟SAEV车队性能特征的模型,减少充电时间会降低车队响应时间。文献[7]介绍了一个有预约机制的电动汽车共享系统模型,通过最大化汽车共享运营商的净收入和用户的利益来确定最佳车队规模。文献[8]研究了在不同的场景下,SAEV优化结果对算例参数的敏感性。在目前大多数研究中,当考虑SAEV的充电时,充电优化的优先级通常是次于运输优化的,并且忽略了车辆充电对电网造成的影响[9-10]。文献[11]开发了一个优化框架,用于在车队环境中优化电动车辆的路线和充电,这项工作还包括讨论该车队对配电网的可能影响。文献[12]在东京开发了一个基于启发式的充电调度模拟模型,评估了该模型降低充电成本和向电网提供运行储备的潜力。文献[13]提出了一种模型预测控制方法,用于优化具有最优再平衡和考虑车辆充电约束的自主汽车共享系统,但其只能在小规模的系统中应用。
SAEV在未来交通与电网的整合之中将扮演十分重要的角色,但现阶段研究还缺少真正能够应用到大规模系统的模拟案例。因此本文建立了一个SAEV系统优化框架,以模拟SAEV车队的出行以及充电优化服务,其中包括充电优化模型和交通优化模型,该系统模型可以周期性地进行车辆再平衡迁移和充电优化。为了整合优化模型,提出了一种基于云-边协调的控制优化框架,采用2种算法分别用于车辆的再平衡与订单任务,得到一个更易于处理的解决方案,并使用V2G和动态电价进行充电优化,减少SAEV车队整体的充电成本,同时能够及时满足乘客的出行需求。通过深圳的真实数据集验证了该系统在降低成本和提高交通效率方面的潜力。
1 SAEV的再平衡优化模型及分配算法
1.1 SAEV再平衡优化模型
在人们的交通出行中,出行者总是希望减少在出发地点的等待时间,因此需要一种实用的车辆再平衡策略,以更好地利用预测未来旅行需求来重新平衡空闲的SAEV。因此,第1步需计算未来时间里节点间的车辆不平衡度;第2步要以减少再平衡时间为目标,通过优化找到最佳的车辆迁移策略来消除或降低不平衡。
为了了解车辆需要多少能量,以及有多少车辆可以充电,需要对车辆行驶时间和利用率进行粗略估计。在再平衡优化的时间区域内,通过最大化搬迁车辆的数量解决整个地区的车辆分布不平衡问题:
在再平衡优化阶段的t时刻,式(1)的目标是使能被搬迁车辆总数最大化,并且优先考虑临近节点的搬迁活动,其中决策变量xij为需要为再平衡任务移动的车辆数量,Tij为节点i,j之间的行程时间,Tmax是最大再平衡行程时间。式(2)中的Xi定义为i节点的不平衡度,ni和li分别为该时间区间内到达和离开节点的预期乘客人数。式(3)分别规定了当i节点不平衡度为正(即i节点在上一时刻驶出的车辆数量小于驶入的车辆数量)时,i节点参与再平衡任务的车辆数量不能大于该节点的不平衡度;当i节点的不平衡度不为正时,不从该节点迁移车辆;当j节点的不平衡度为负时,以j节点为目的地的再平衡任务应该不大于j节点不平衡度的绝对值。
1.2 再平衡任务车辆分配算法
根据再平衡优化模型所制定的计划对车辆进行再平衡。该模型仅得到了每个节点之间需要参与再平衡活动的车辆总数,因此本文使用分配算法决定在节点上可用的车辆中迁移哪些特定的车辆。图1给出了再平衡车辆分配算法的流程。首先定义了1组满足参与再平衡任务条件的车辆集合κ。这些车辆需要满足以下3个条件:1)所在的节点或车辆最终目的地为节点i;2)到目的地的行程时间dk与预期再平衡行程时间Tij之和需要小于最大的再平衡行程时间Tmax;3)车辆剩余的电量足够完成整个行程。当有再平衡任务需要执行时,算法将此刻SOC最高的可用车辆分配给该任务,之后更新该车的目的地和与最终目的地的旅行时间。最后,将此车辆从可用车辆集合移除,并将未完成的再平衡任务减少1。如果没有可用的车辆,算法退出循环,继续考虑下一个节点(i+1),直到遍历完所有节点,此时分配算法结束。
2 SAEV的充电模型及分配算法
2.1 充电优化模型
与针对私人电动汽车的充电优化模型不同,为了使模型能够在更大规模的算例中进行应用,本文采用的是整个SAEV车队的充电优化,因为模型的重点不是单台汽车的能量演化模型,而是整个SAEV系统的成本与效率[14]。整个SAEV车队能够通过需求响应来降低充电的成本,提高乘客的用户满意度。充电优化最终决定了车队和电网交换的能量总量。充电优化模型如下所示。
式(4)的目标是在充电优化周期范围内将充电成本最小化,其中充电优化存在2个决策变量:1)E(t),即车队在充电站内为电池充电的总能量;2)G(t),即车队向电网出售的总能量。βe(t)为实时电价,βb(t)为电池循环费用系数,λ是一个足够大的数,这样能够保證优化周期最后时刻电动汽车不会彻底放电。式(5)表示整个车队所储存的能量演化过程,其中Q(t)为SAEV车队中所储存的总能量,η为V2G的效率,α为电池消耗系数,即电动汽车行驶时每分钟所需要消耗的能量,hT(t)为乘客出行的总时间,hR(t)由再平衡优化中所得到。式(6)约束了SAEV车队中所储存的总能量的上限与下限,m为SAEV车队的规模大小,b为单台电动汽车的电池容量,qmin,qmax分别为单台电动汽车的SOC下限与上限,σ为一个常数,这个常数能够防止电动汽车过放电。式(7)表示t时刻完成再平衡任务所需要的时间。式(8)表示在整个再平衡优化阶段SAEV系统能够交换的最大能量,Tc为再平衡优化的时间长度,hT(t)为在再平衡优化的所有乘客出行订单的时间总和,Pc为SAEV的充电功率。式(9)与式(10)为充电与V2G放电的上限与下限。
2.2 车辆订单分配算法
当完成了交通再平衡优化与充电优化后,此时应遵循出行请求的顺序,即先来后到的顺序对车辆进行订单的分配。如图2所示,本文定義在t时刻所有的旅客出行请求集合为Pt,θn表示每个乘客订单请求,κ表示一组满足订单需求的可行驶车辆,这些车辆有足够的电量来满足所有行程的要求。对于κ中所包含的每一辆车,定义了一个车辆分配优先级系数δk,其中dk为车辆k为完成当前任务仍剩余的行驶时间,T(vk,i)为车辆行驶目的地(若处于空闲或充电状态即为当前位置)距离订单起始位置i点需要行驶的时间步长,若这两者相加最小,即两者相加的负值为最大,即为优先级最大。将请求分配给优先级系数δ最高的车辆,即选择最近的车辆分配订单,然而有可能会存在多辆SAEV优先级系数同样大的情况,这时还需引入一个电量比较系数(1-qk),即在相同优先级系数的多辆SAEV中选择当前剩余电量最多的车辆进行任务分配,此外,需要给电量比较函数增加一个分母,这是为了减少电量在优先级中的重要性,优先比较的还是实际车辆能够到达订单起始点所花费的时间。如果在集合κ中没有具备满足行程的车辆,则将该请求添加到下一个时间步骤的请求Pt+1中。
2.3 车辆的能量演化模型
在结束订单指派之后,开始计算下一时刻车辆k仍剩余的行驶时间:
同时对电动汽车的状态进行定义:
式中:uk(t),wk(t)为0,1变量;wk(t)为车辆k的行驶状态;uk(t)为车辆的停止状态。式(13)规定车辆只有行驶和停止2种状态。
式(14)和式(15)分别表示k车在t时刻的充电与放电功率,式(16)表示单台SAEV的能量演化模型。
3 云-边协调控制策略
3.1 云-边协调框架
随着车联网技术的发展,云计算将难以满足大规模电动汽车所需要采集的数据传递、计算和储存的实时需求。云-边协调计算框架能够有效弥补云计算远离数据中心的不足,同时借助云计算强大的优化协调和控制能力,利用边缘侧更加接近用户侧的优势,在边缘对数据进行处理,提高系统的响应能力,同时协调云端、边缘侧和车载终端三方进行数据的交换通信[15]。如图3所示,云平台不仅接收车辆的信息,还需要从需求侧管理服务器获取电网的实时负荷、电价数据,同时预测出行订单数据,以进行决策。边缘侧接受来自于云计算平台的优化参数,并将车载终端的车辆状态以及周边环境状态进行处理之后上传至云平台,此外,不同的边缘平台之间还同样存在信息交互,更大范围覆盖的云边协调服务[16]。车载终端在行驶过程中上传实时的车辆信息和周边道路信息,并且接受边缘层的充电和迁移指令。
本文以SAEV为研究对象,从充电调度和再平衡调度2个方面研究SAEV与电网的相互作用。假设车辆由监督共享运输服务的公司或实体管理,由一个中央机构(云计算平台)接受来自乘客的呼叫请求,移动到充电站的决定和充电量是分散的,取决于每辆汽车的SOC、等待时间、总运输需求,以及当前和预期的电价。边缘计算平台存在于距离车载终端较近的区域,可以是智能交通信号灯、电动汽车充电桩等设备[17],其接收云平台优化的实时数据,采用本文所提出的算法进行车辆的任务分配,并与边缘侧相近的车辆进行信息沟通,对其下达充电或迁移指令。最后,SAEV收到移动指令进行订单的运输工作或连入电网进行充放电活动。
3.2 控制策略与流程
本文的优化目标是SAEV车队的路线、再平衡和充电过程,在减少乘客等待时间的同时,考虑实时电价,将充电成本降至最低。然而,充电与再平衡过程有着不同的优化时域要求。电动汽车充电通常需要在几个小时的控制范围内进行优化,原因是:1)电力需求和可再生能源(如风能和太阳能)的生产变化相对缓慢,而变化的自然时间框架可以是几个小时[18];2)频繁的充放电计划会导致电池寿命下降。另一方面,因为车辆共享行程的平均持续时间通常为10~20 min,因此为了车队重新平衡而进行的车辆迁移优化时域也应该在这个范围内[19]。为了应对建模的复杂性,所提框架将原始问题建立为3个独立的子问题:1)再平衡迁移问题;2)充电优化问题;3)分配车辆给订单和再平衡任务。每个问题都采用了不同的时间步长,车辆分配的时间步长较短,能够快速地满足乘客的交通需求,与之相反,充电和再平衡的时间步长较长。在不同的时间点,通过云-边-端框架进行数据通讯,从而达到总体优化的效果。
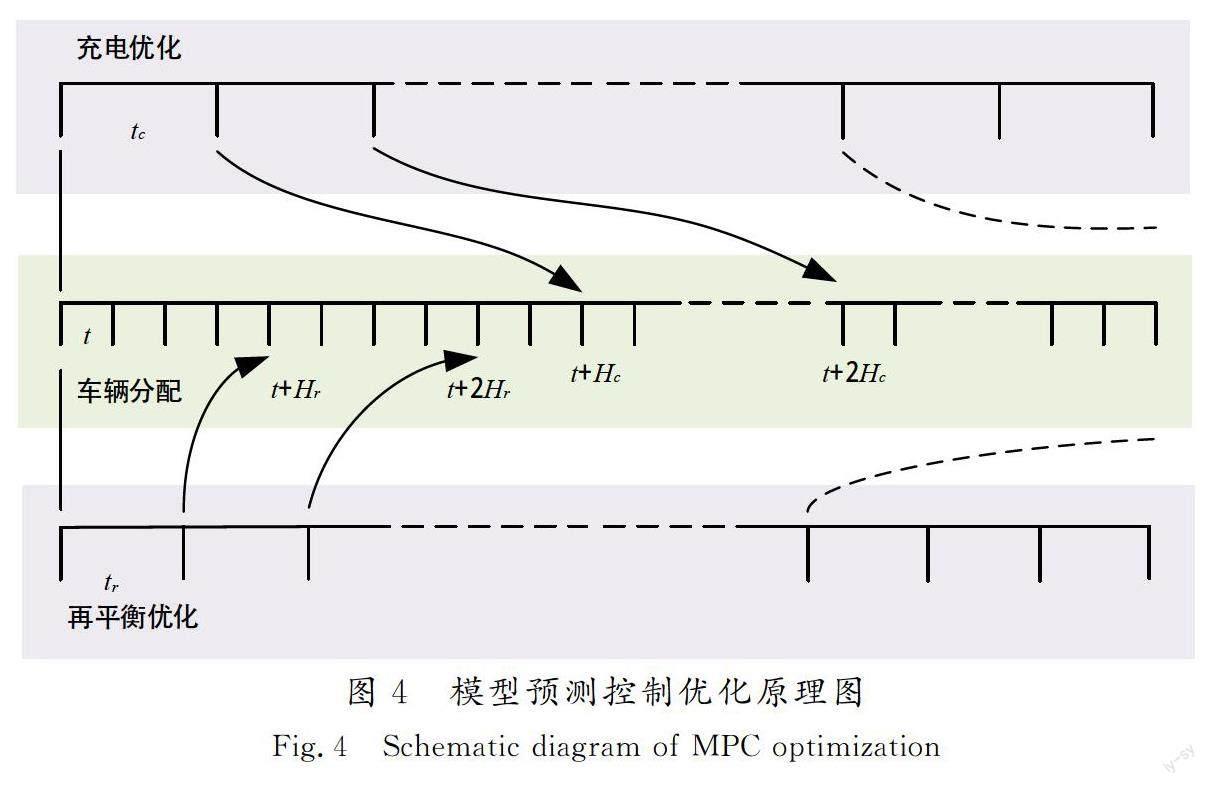
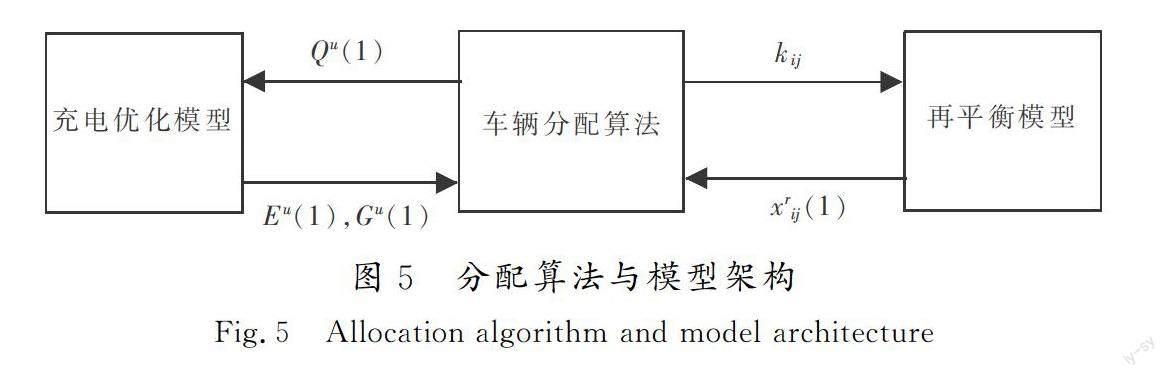
本文采用一种模型预测控制(MPC)方法来优化再平衡与充电过程。模型预测控制作为研究不确定系统的优化控制方法,本质上是一种基于模型的闭环优化控制算法,通过预测模型来预测其未来可能的变化,进而选择更好的控制行为。模型预测控制中,每个时间步在一个时间范围内执行优化,并且只执行第1个控制动作。这确保了在每一个时间步骤中,当采取当前动作时,控制使用直到未来预测范围的所有可用信息。如图4所示,在本文中,充电优化步长Hc设定为30 min,再平衡优化步长Hr设定为10 min,而车辆分配的步长为1 min。充电优化、再平衡优化与车辆分配算法三者之间的关系如图5所示。
图6为模型流程。当mod(t,Hc)=0时,执行充电优化,此时的充电优化序列为c,充电优化中的优化时域Tc=NcHc,而优化时域内的时间序列τ=[1,2,…,Tc],因此充电模型将在[t,t+Tc]这个时间域内进行优化,优化步长为Hc,一旦找到模型最优解,即最佳充电和放电控制策略,将控制序列的第1个值Ec(1),Gc(1)传递给仿真模型,这些值被SAEV能量模型用作约束,以控制在单个车辆和电网之间传输能量的量。
同理,当mod(t,Hr)=0时,执行再平衡优化,此时的再平衡优化序列为r,滚动时域Tr=NrHr,其中优化时域内的时间序列=[1,2,…,Tr],再平衡优化模型将在[t,t+Tr]这个时间域内进行优化,优化步长为Hr。当模型找到最优解时,将控制序列的第1个优化结果传递给车辆分配算法,最后实现车辆的再平衡移动。
4 算例分析
4.1 基本参数
本文算例的交通数据选取深圳市2014-10-22的出租车出行数据[20],在对数据噪声进行清洗之后,一共选取了14 128次出行请求,图7为所有出发及目的节点所产生的出行订单热力图。
此外,根据深圳市交通运输委员会的数据,本文选用2015年深圳晚高峰的平均车速25 km/h作为车辆出行速度,选取晚高峰车速能够测试本文中的优化算法在极限情况下的乘客等待情况。电池容量选取比亚迪秦PLUS的近似电池容量50 kW·h,其他详细参数见表1。为了方便后续算例的计算分析,本文使用k-means聚类算法将出行请求的起点和目的地位置聚合成几个固定的节点。k-means聚类算法将所有出行订单的出发地与目的地坐标点的集合作为样本数据集,然后在样本的数据集里随机选取数个数据点作为初始聚类中心,之后计算所选数据集中每个用户数据和初始聚类中心之间的距离,然后产生新的聚类中心,最后判断聚类是否收敛,详细的聚类公式在此不再赘述。
根据图7,大部分乘客的上下车地点集中在深圳市的下半部分,即南山、福田和罗湖区,因此聚类的首要目的是要对这些乘客上下车密集区域进行适当的区域划分,如果是聚类点数太少,则不能很好体现交通数据的准确性;如果聚类点数太多,则会给仿真过程增加不必要的计算量。因此在权衡仿真准确性与计算量之后,本文最终选择了50个点作为划分乘客上下车的区域,并且假设每个节点都存在一个无限容量的充电站,如图8所示。
4.2 结果讨论
本文使用MATLAB对整个仿真优化框架进行模拟,并使用MATLAB中内置的intlinprog函数对式(1)和式(6)中的混合整数线性优化问题进行计算。选取400辆SAEV进行模拟分析,以尽可能地减少乘客的等待时间,同时增加整个SAEV系统的容量进行调度。对3种充电策略进行对比:1)无序充电策略,车辆在闲时即连入充电站进行充电;2)本文所提出的
不考虑V2G的有序充电策略;3)考虑V2G的有序充电策略。
为了减少优化结束时刻车辆SOC水平不同所带来的影响,本文连续进行了7 d的优化模拟,将前一天最后时段的SOC作为第2天开始时的SOC,最后得到模拟优化结果。结果表明,在有序充电的引导下,V2G并不影响乘客的等待时间,因此选择了充电策略1与充电策略3进行比较,如图9所示,在16:00~17:00时,有序充电相较无序充电的乘客等待时间增加了3.2%,这是因为此时充电价格为平电价,有序充电策略引导车辆在电价高峰前进行充电,从而增加了此刻有序充电的乘客等待时间。而在18:00~19:00时,由于前一时间段为平电价,有序充电引导车辆进行了大量的充电,车辆整体SOC水平较高,有序充电将会引导车辆充电时间后移,从而优先满足交通运输的需求。因此有序充电相较无序充电的乘客等待时
间减少了13.3%。但总体而言,无序充电与有序充电策略对于乘客等待时间的影响并不显著,这主要是因为在有序充电策略中,有序充电可以引导车辆充电时间后移,交通运输需求能够被优先满足。
本文模拟了在有序充电策略的引导下,无再平衡优化与再平衡优化对于乘客等待时间的影响。无再平衡优化即按需移动,当没有可派遣车辆的节点出现出行订单时,从临近的节点寻找合适的共享汽车进行移动。如图10所示,在0:00~6:00时间段的出行订单数相对较少,每个节点的车辆数量比较充裕,此时乘客等待时间基本为0。经过6 h的车辆迁移过程后,由于各个节点的车辆数量开始出现不平衡,在某些节点中出现了没有车辆可以派遣的情况,因此当有新的订单出现时,需要重新从邻近的节点进行迁移,这样必然将会增加乘客的等待时间。在6:00~19:00时,由于订单的增加,整个地區车辆不平衡的状态将会逐渐加剧,进而使得乘客的等待时间大幅增加。在模拟中,再平衡优化能够减少每次出行乘客平均1.45 min的等待时间,其能够显著提升整个共享汽车系统的效率,减少乘客的等待时间。
然而,再平衡优化虽然在减少乘客等待时间、提高用户满意度方面有着十分显著的效果,但是由于再平衡优化将空闲车辆移动至不平衡的节点,当不平衡节点在未来时刻并没有足够的出行请求时,相较于“按需移动”,会增加一些SAEV的移动成本。表2列出了有再平衡优化与无再平衡优化的充电花费,相较于“按需移动”,车辆日均充电花费增加了807.8元。但对于SAEV系统而言,优先需要考虑的是乘客的等待时间。在用户满意度优先的条件下,这些成本是可以接受的。
表2同样列出了3种充电策略的充电花费情况,不难看出,有序充电相较于无序充电,其能够有效地减少充电的成本,这不仅仅是因为闲时的SAEV能够通过V2G向电网输送能量,更主要的原因在于需求响应的帮助。如图11所示,通过实时电价的引导,车辆能够在电价低谷时充满电,电价峰值时作为储能设备向电网输送能量。具体而言,0:00~7:00时属于谷电价时间,此时车辆出行订单量也为一天内最少,因此大部分的车辆都连接在充电站内充电,7:00~10:00属于平电价,此时的车辆一方面进行出行订单的接送,一方面进行再平衡优化移动,因此车辆同样偏向在平电价时刻充电补充交通移动所消耗电量,此后在10:00~14:00属于峰值电价,此时车辆通过V2G向电网售出了大量的电能,经过这时段之后的SAEV车队的整体SOC水平都将偏低,需要在低电价时刻进行大量的充电,故14:00~18:00每个小时都有大量的充电功率。18:00~21:00将再售出SAEV车队里的一部分能量,剩下一部分能量需要满足乘客的订单需求。21:00~24:00没有太大的功率波动,这是因为车辆进行的是连续7 d的模拟测试,车辆倾向在第2天0:00~7:00谷电价时期补充电量,将SAEV车队的整体电量提升至较高水平以满足这一天的出行需求。
4.3 车队规模的影响
本文分别对车队规模为300,350,400辆时进行仿真,探究在订单数不变的情况下,车队规模对于充电成本及顾客等待时间的影响。如图12所示,对无序充电而言,车队规模对于其充电花费的结果影响都不大,这是因为虽然随车队规模的增大,车队所需要再平衡的费用将会减少,但同时更大规模的车队同时需要充入更多的电,因此车队规模对于无序充电的成本影响并不显著。
对于有序充电而言,V2G能够有效地减少车队的充电花费,且随着车队规模的增大,减少的幅度越大,这是因为当系统内共享电动汽车数量越多时,意味着可支配的电力柔性负荷越多,这样能够在电价低谷时充入更多的电量,同时在电价高峰时卖出,最后使得充电成本大大减少。当车队达到更大规模时,可以把整个SAEV车队抽象成一个巨大的蓄电池为电力系统提供充放电服务,但实际上更大规模的车队意味着更大的系统基础设施成本投入,所以该控制策略还可以为SAEV车队的规模制定提供参考。
如图13所示,无论车队规模的大小,3种不同的充电策略对于乘客的平均等待时间影响不大。随着车队规模的增大,能够分配到每个节点上的车辆会越多,因此乘客的等待时间将会大大缩短。
当车队规模为400辆时,每次模拟的时间约为4 s。经过测试,本文模型完全可以拓展到大规模的调度当中。例如将订单数和车队规模提高2个数量级时,完成1次24 h模拟平均花费的时间只需要70 s,证明该模型可以适应更复杂的模拟,为实时优化调度提供了可能性。
5 结 论
为了解决SAEV运行问题,针对SAEV的出行特性以及调度机制,提出了一种基于云-边协调框架的SAEV优化控制策略,将一个SAEV的复杂优化问题分成了再平衡优化、充电优化以及车辆交通运行调度3个子问题进行求解,实现电动汽车的最优充电与迁移策略。使用深圳出租车出行数据验证了该优化控制方法,得出结论如下。
1)在有序充电的引导下,V2G并不会影响乘客的等待时间,且能够有效减少SAEV车队的充电成本。提出的再平衡优化策略虽然为SAEV系统增加了一些成本,但能够为出行乘客平均每次减少145 min的等待时间,显著提升整个共享汽车系统的效率,提高乘客满意度。
2)对不同的车队规模进行了比较,随着车队规模的增大,乘客的等待时间将会大大缩短。当车队达到更大规模时,得益于V2G技术可以有效地减少车队的充电花费。对模型的可拓展性进行了模拟,证明该优化策略可以扩展到更大的系统中,为实时优化调度提供了可能性。
本文假设每个聚合节点都存在一个无限容量的充电站,但在实际充电站布局中,充电站的覆盖规模并不能达到这种理想情况,另外也忽略了SAEV在充电站内排队等待充电的影响。因此,下一步的研究重点将考虑基础充电设施的约束,探究充电站的位置、规模、容量大小、充电速度等因素对SAEV优化结果的影响。
参考文献/References:
[1]VOSOOGHI R,PUCHINGER J,BISCHOFF J,et al.Shared autonomous electric vehicle service performance:Assessing the impact of charging infrastructure[J].Transportation Research Part D:Transport and Environment,2020,81.DOI: 10.1016/j.trd.2020.102283.
[2] SHAHEEN S A,CHAN N D,MICHEAUX H.One-way carsharing′s evolution and operator perspectives from the Americas[J].Transportation,2015,42(3):519-536.
[3] ZHONG Lingshu,PEI Mingyang.Optimal design for a shared swap charging system considering the electric vehicle battery charging rate[J].Energies,2020,13(5).DOI: 10.3390/en13051213.
[4] 陳萍,宋思勰,刘晓彤.基于超停的共享电动汽车再平衡调度[J].工业工程与管理,2022,27(2):128-135.
CHEN Ping,SONG Sixie,LIU Xiaotong.Vehicle relocation problem based on over-parking practice for shared electric vehicle system[J].Industrial Engineering and Management,2022,27(2):128-135.
[5] 张瑞友,王朝鸣,王德成.考虑充电调度的共享电动汽车调运模型与优化[J].系统工程理论与实践,2021,41(2):370-377.
ZHANG Ruiyou,WANG Chaoming,WANG Decheng.Modeling and optimization of transportation problem for shared electric-cars with recharging scheduling[J].Systems Engineering-Theory & Practice,2021,41(2):370-377.
[6] LOEB B,KOCKELMAN K M,LIU J.Shared autonomous electric vehicle (SAEV) operations across the Austin,Texas network with charging infrastructure decisions[J].Transportation Research Part C:Emerging Technologies,2018,89:222-233.
[7] BOYACI B,ZOGRAFOS K G,GEROLIMINIS N.An optimization framework for the development of efficient one-way car-sharing systems[J].European Journal of Operational Research,2015,240(3):718-733.
[8] ZHANG Li,LIU Zhongshan,YU Lan,et al.Routing optimization of shared autonomous electric vehicles under uncertain travel time and uncertain service time[J].Transportation Research Part E:Logistics and Transportation Review,2022,157.DOI: 10.1016/j.tre.2021.102548.
[9] GREENBLATT J B,SAXENA S.Autonomous taxis could greatly reduce greenhouse-gas emissions of US light-duty vehicles[J].Nature Climate Change,2015,5(9):860-863.
[10]WEISS J,HLEDIK R,LUEKEN R,et al.The electrification accelerator:Understanding the implications of autonomous vehicles for electric utilities[J].The Electricity Journal,2017,30(10):50-57.
[11]CHEN T D,KOCKELMAN K M,HANNA J P.Operations of a shared,autonomous,electric vehicle fleet:Implications of vehicle & charging infrastructure decisions[J].Transportation Research Part A:Policy and Practice,2016,94:243-254.
[12]IACOBUCCI R,MCLELLAN B,TEZUKA T.Modeling shared autonomous electric vehicles:Potential for transport and power grid integration[J].Energy,2018,158:148-163.
[13]ZHANG R,ROSSI F,PAVONE M.Model predictive control of autonomous mobility-on-demand systems[C]//2016 IEEE International Conference on Robotics and Automation (ICRA).Stockholm:IEEE,2016:1382-1389.
[14]JIANG Aihua,WEI Hua,DENG Jun,et al.Cloud-edge cooperative model and closed-loop control strategy for the price response of large-scale air conditioners considering data packet dropouts[J].IEEE Transactions on Smart Grid,2020,11(5):4201-4211.
[15]楊军,林洋佳,陈杰军,等.未来城市共享电动汽车发展模式[J].电力建设,2019,40(4):49-59.
YANG Jun,LIN Yangjia,CHEN Jiejun,et al.The future development mode of sharing electric vehicles in the cities[J].Electric Power Construction,2019,40(4):49-59.
[16]张巍,王丹.基于云边协同的电动汽车实时需求响应调度策略[J].电网技术,2022,46(4):1447-1456.
ZHANG Wei,WANG Dan.Real-time demand response scheduling strategy for electric vehicles based on cloud edge collaboration[J].Power System Technology,2022,46(4):1447-1456.
[17]陈明庆,李建林.基于局部电压幅值与云边协同的分散式充电桩充电协调方法[J].电力建设,2020,41(6):60-68.
CHEN Mingqing,LI Jianlin.A charging coordination method for distributed charging piles considering local voltage amplitude and cloud-edge collaboration[J].Electric Power Construction,2020,41(6):60-68.
[18]林歆悠,翟柳清,林海波. 基于行驶工况的混合动力电动汽车能量管理策略研究现状分析[J].河北科技大学学报,2016,37(5):457-463.
LIN Xinyou,ZHAI Liuqing,LIN Haibo. Research status of hybrid electric vehicle energy management strategy based on the driving cycle[J]. Journal of Hebei University of Science and Technology,2016,37(5):457-463.
[19]BOLDRINI C,BRUNO R,LAARABI M H.Weak signals in the mobility landscape:Car sharing in ten European cities[J].EPJ Data Science,2019,8(1).DOI: 10.48550/arXiv.2109.09832.
[20]WANG Guang,CHEN Xiuyuan,ZHANG Fan,et al.Experience:Understanding long-term evolving patterns of shared electric vehicle networks[C]//The 25th Annual International Conference on Mobile Computing and Networking.Los Cabos:Association for Computing Machinery,2019:1-12.
