网联混合动力汽车跟驰场景的预测能量管理控制
2023-04-29陈晓龙焦晓红
陈晓龙 焦晓红
摘 要:针对网联混合动力汽车跟驰场景下能量管理控制中燃油经济性和驾驶安全性综合优化问题,利用车-车及车-路通信,设计了一种基于前车速度预测-本车速度规划的预测能量管理控制策略。前车速度预测器由长短时记忆神经网络构建,神经网络内部超参数通过粒子群优化算法离线优化确定;基于预测的前车速度,求解以跟车距离、车速度、加速度及直接影响驾驶舒适性的车辆冲击度为成本函数的优化问题获得预测域内本车的速度规划;进一步利用序列二次规划算法求解车辆燃油经济性和驾驶安全性综合优化的能量管理控制问题,得到最优功率分配控制策略。多种驾驶工况下的仿真验证了所提出的预测控制策略的有效性及车辆安全跟驰下较好的燃油经济性。
关键词:混合动力汽车; 速度预测器; 速度规划; 能量管理;优化控制
中图分类号: U469.7 文献标识码: A DOI:10.3969/j.issn.1007-791X.2023.01.005
0 引言
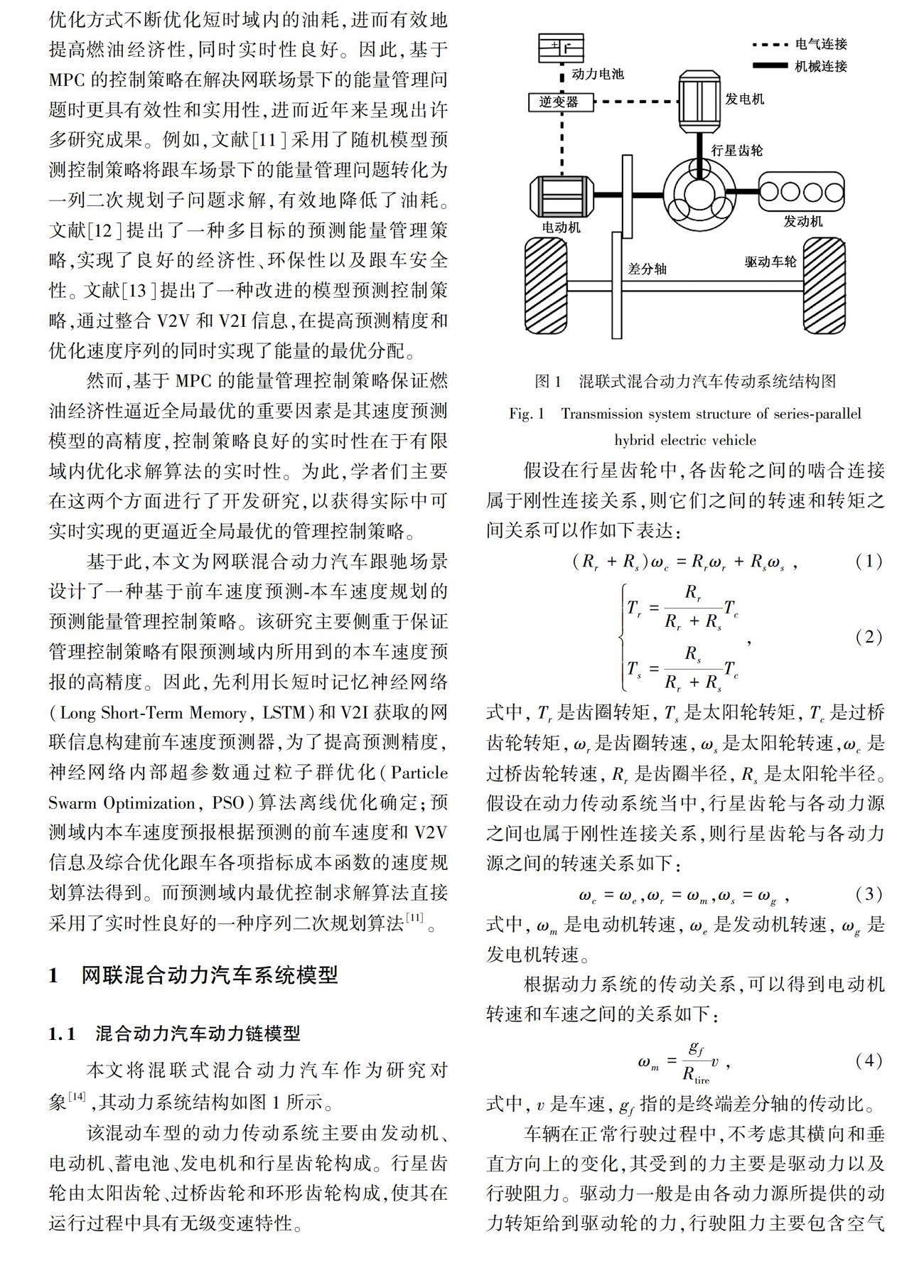
汽车的智能化、电动化和网联化已经成为当前的重要研究领域[1]。利用车-车 (Vehicle to Vehicle, V2V) 通信以及车-路(Vehicle to Infrastructure, V2I)所得到的网联信息,能够有效地降低事故发生率和尾气排放量,进而提高车辆的经济性能和节能性能。另一方面,智能网联技术的飞速发展,为高质量的新能源汽车能量管理控制策略的设计提供了新技术。目前,新能源汽车主要分为三类,包括燃料电池汽车、纯电动汽车、混合动力汽车[2-3]。燃料电池汽车、纯电动汽车由于各自的瓶颈问题在应用推广上目前受到限制。混合动力汽车(Hybrid Electric Vehicle, HEV)由于其内部存在多个动力源,使其在续航里程上明显优于纯电动汽车,同时,也能减少有害气体的排放[4-5]。因此,HEV受到青睐。
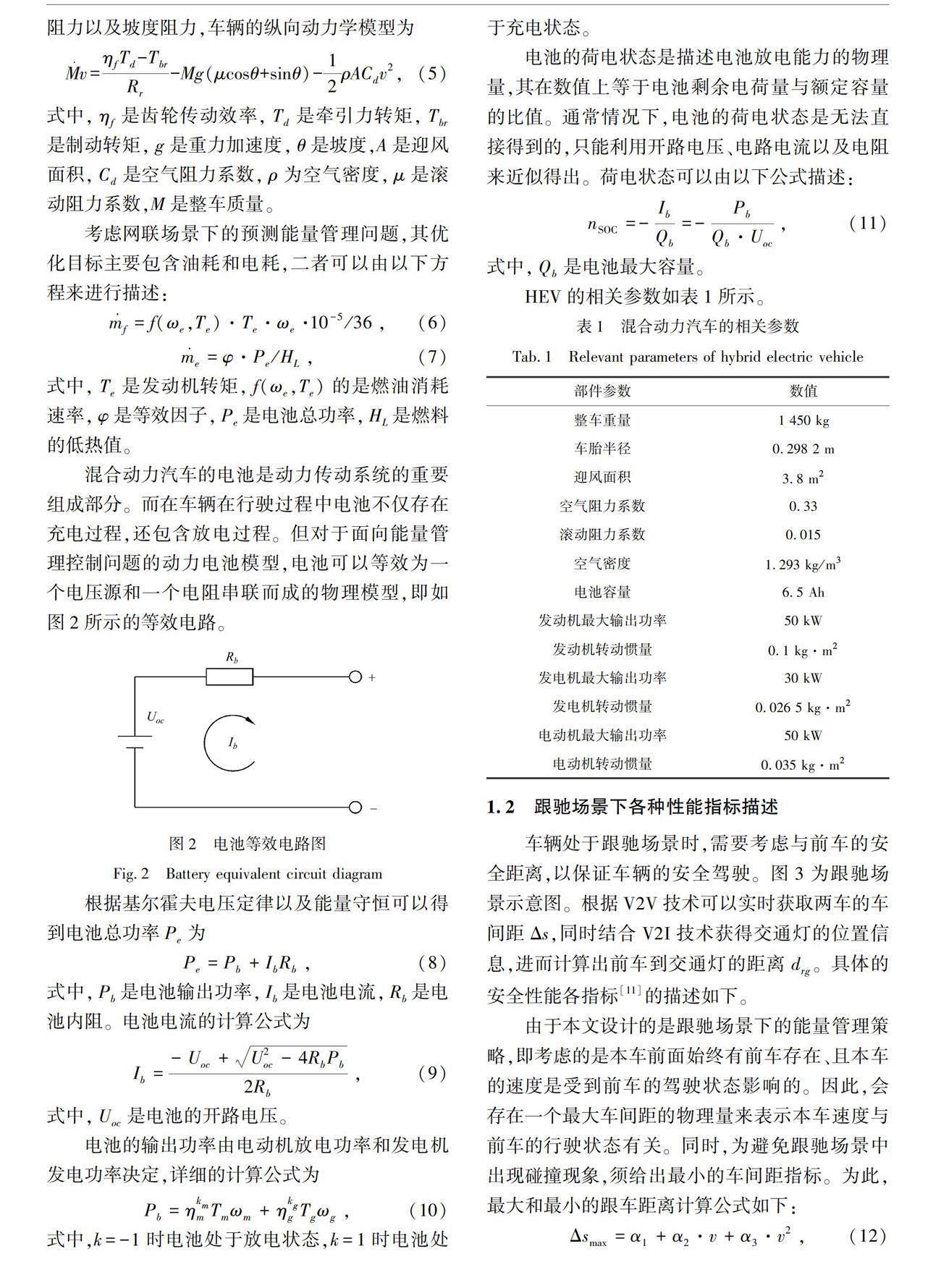
混合动力汽车行驶过程中良好的燃油经济性主要依赖于其有效的能量管理控制策略。能量管理策略主要由两大类构成,基于规则[6-7]和优化[8]的控制策略。基于规则的控制策略应用较为广泛,这主要得益于此种策略的设计较为简单及实时性较强。但是基于规则的控制策略不能保证燃油经济性的最优。为此,大量的研究开发转向了基于优化的能量管理策略。该策略又可以分为全局优化和瞬时优化两种控制策略。其中基于全局优化的动态规划算法可以实现最佳的燃油经济性。但是因其计算效率低且驾驶条件要求完全已知,导致该算法无法应用到实时的能量管理控制策略当中。基于瞬时优化方法主要包含等效燃油消耗最小策略 (Equivalent Consumption Minimization Strategy, ECMS)及模型预测控制(Model Predictive Control, MPC)策略。在设计ECMS时需要考虑等效因子的自适应性,而车辆行驶过程中由于受到众多因素的影响使得最佳等效因子难以获取,导致在实时应用过程中无法实现最优燃油经济性[9]。
基于瞬时优化的MPC方法[10]可以采用滚动优化方式不断优化短时域内的油耗,进而有效地提高燃油经济性,同时实时性良好。因此,基于MPC的控制策略在解决网联场景下的能量管理问题时更具有效性和实用性,进而近年来呈现出许多研究成果。例如,文献[11]采用了随机模型预测控制策略将跟车场景下的能量管理问题转化为一列二次规划子问题求解,有效地降低了油耗。文献[12]提出了一种多目标的预测能量管理策略,实现了良好的经济性、环保性以及跟车安全性。 文献[13]提出了一种改进的模型预测控制策略,通过整合V2V和V2I信息,在提高预测精度和优化速度序列的同时实现了能量的最优分配。
然而,基于MPC的能量管理控制策略保证燃油经济性逼近全局最优的重要因素是其速度预测模型的高精度,控制策略良好的实时性在于有限域内优化求解算法的实时性。为此,学者们主要在这两个方面进行了开发研究,以获得实际中可实时实现的更逼近全局最优的管理控制策略。
基于此,本文为网联混合动力汽车跟驰场景设计了一种基于前车速度预测-本车速度规划的预测能量管理控制策略。该研究主要侧重于保证管理控制策略有限预测域内所用到的本车速度预报的高精度。因此,先利用长短时记忆神经网络(Long Short-Term Memory, LSTM)和V2I获取的网联信息构建前车速度预测器,为了提高预测精度,神经网络内部超参数通过粒子群优化(Particle Swarm Optimization, PSO)算法离线优化确定;预测域内本车速度预报根据预测的前车速度和V2V信息及综合优化跟车各项指标成本函数的速度规划算法得到。而预测域内最优控制求解算法直接采用了实时性良好的一种序列二次规划算法[11]。
3 仿真验证与分析
3.1 速度预报模型精度驗证与分析
本文采用2021年IFAC E-CoSM会议提出的挑战问题的交通数据。该数据集中包含26个交通灯,其中共包括车辆速度、加速度以及车辆到下一个交通灯的距离数据,共有18 728个数据集样本。其中,以前90%的数据作为训练集,后10%的数据作为测试集来验证所提出的预测模型性能的优劣。首先,采用PSO算法对其超参数进行优化,并将均方差作为算法的适应度函数,适应度函数值随迭代次数的变化结果如图7所示。
为验证优化后的预测模型的预测性能好坏,采用测试集数据进行预测,并选择预测域为10 s,其预测结果图如图8所示。本文中将均方根误差(Root Mean Square Error, RMSE)以及平均绝对误差(Mean Absolute Error, MAE)作为预测性能的评价指标,其计算公式如下:
e1=∑tft=t01m∑mi=1(v′i-vi)2tf-t0,(38)
e2=∑tft=t01m∑mi=1|v′i-vi|tf-t0 ,(39)
式中,e1為均方根误差,e2为平均绝对误差,m为预测域长度,t0和tf是初始时间和终止时间,v′i和vi分别是实际速度和预测速度。
为清晰地描述超参数优化对预测模型的精度的影响,分别采用文献[15]中的条件线性高斯模型(Conditional Linear Gauss, CLG)、未优化超参数的LSTM模型以及BP神经网络模型来进行对比,对比结果如表3所示,结果显示所提出的预测模型具有最佳的预测性能。其中,未优化超参数的速度预测模型采用了文献[16]的超参数设置方法。
3.2 能量管理策略结果验证与分析
图9给出了一组前车驾驶工况以及本车的跟车情况。
从图9(a)可以看出在大多数加速情况下本车车速是小于前车车速的,减速情况下本车车速略高于前车车速,这表明本车一直能保持良好的跟车状态。从图9(b)中可以看出,前车到交通灯的距离由0骤然上升表示前车刚刚经过一个交通灯,正驶近另一个交通灯。图9(c)和图9(d)给出了前车通过交叉路口时交通灯的状态以及交通灯的持续时间,从中可以看出在前车通过交叉路口时,交通灯大多数处于绿灯状态,此时本车速度不为0,且一直处于加速状态,根据式(26)判断此时完全可以通过路口;而当交通灯处于红灯状态时,交通灯的持续时间均不超过5 s,此时本车处于停车等待状态,而前车的车速较低,待本车通过交叉路口之后依然能够保证跟车状态。从图9(e)可以看出两车间距较大的时候车辆多处于车速较高的巡航状态,主要是因为当车速较高的时候,为防止追尾需拉大车间距,这样可以有效地增加驾驶安全性。相反,当车速较低的时候,发生追尾的风险较低,所以可以适当缩小两车之间的车间距。综合这几个图来看,本车在行驶过程当中一直保持较高的驾驶安全性。
为验证所提策略的有效性,本文给出了两种控制策略作为比较,第一种策略为基于规则的方法;第二种策略为文献[11]中的跟驰能量管理策略。以图9的驾驶工况作为测试工况,图10给出了本车SOC变化曲线,可以看出由这几种控制策略得到的SOC终值相差不大,基本上都处于0.47左右。图11是三种控制策略的燃油消耗对比图,可以看出所提出的能量管理策略具有较好的控制效果,同时油耗也是最低的,且其油耗要比基于规则的控制策略产生的油耗低得多。
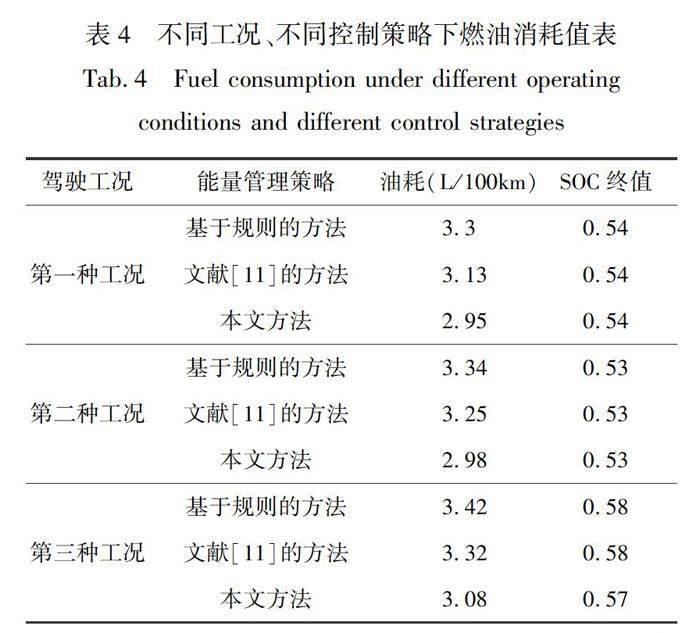
为进一步验证所设计的能量管理策略的可行性与适应性,在三个驾驶工况下进行了仿真测试 ,这三种驾驶工况下本车的油耗以及SOC终值见表4。
从表4中可以看出,所提出的跟驰场景下的预测能量管理策略在三种驾驶工况下仍能保持较高的适应性,且其燃油经济性高于其他两种预测能量管理策略。 例如,在第一种工况中,所提出的方法比其他两种方法的燃油经济性提升11%和6%。同时,在多种驾驶工况下,这三种策略的SOC终值相差不大。
4 结论
本文以混联式HEV为研究对象,提出了一种网联跟驰场景下的预测能量管理策略。通过对前车速度、加速度以及交通灯等网联信息的采集,构建了基于LSTM的前车速度预测模型。在预测模型设计中,采用PSO算法进一步优化了LSTM模型的超参数,提高了预测性能。然后,针对跟驰场景下的驾驶安全性问题,设计了基于前车速度预测的本车速度规划算法。最后,针对混合动力汽车的能量管理问题,采用了序列二次规划算法在短时域内对控制量寻优。仿真结果表明,所设计的这种预测能量管理策略,不仅保证了跟车时的驾驶安全性,而且实现了良好的燃油经济性。
参考文献
[1] 马建, 刘晓东, 陈轶嵩, 等. 中国新能源汽车产业与技术发展现状及对策[J]. 中国公路学报, 2018, 31(8): 1-19.
MA J, LIU X D, CHEN Y S, et al. Current situation and countermeasures of Chinas new energy vehicle industry and technology development[J]. China Journal of Highway and Transport, 2018, 31(8): 1-19.
[2] ZHANG X, PENG H, SUN J. A near-optimal power management strategy for rapid component sizing of multimode power split hybrid vehicles[J]. IEEE Transactions on Control Systems Technology, 2014, 23(2): 609-618.
[3] QI X, WU G, BORIBOONSOMSIN K, et al. Development and evaluation of an evolutionary algorithm based online energy management system for plug-in hybrid electric vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 18(8): 2181-2191.
[4] LI L, YAN B, YANG C. Application oriented stochastic energy management for plug-in hybrid electric bus with AMT[J]. IEEE Transactions on Vehicular Technology, 2015, 65(6): 4459-4470.
[5] CHEN Z, LI L, YAN B. Multimode energy management for plug-in hybrid electric buses based on driving cycles prediction[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(10): 2811-2821.
[6] LI C, LIU G. Optimal fuzzy power control and management of fuel cell/battery hybrid vehicles[J]. Journal of Power Sources, 2009, 192(2): 525-533.
[7] 李萍, 朱曉璐, 焦晓红. 基于智能优化规则的并联混合动力汽车能量管理策略[J]. 燕山大学学报, 2019, 43(6): 547-553.
LI P, ZHU X L, JIAO X H. Parallel hybrid electric vehicle energy management strategy based on intelligent optimization rules[J]. Journal of Yanshan University, 2019, 43(6): 547-553.
[8] MAINO C, MISUL D, MUSA A, et al. Optimal mesh discretization of the dynamic programming for hybrid electric vehicles[J]. Applied Energy, 2021, 292: 116920.
[9] LEI Z, QIN Q, HOU L, et al. An adaptive equivalent consumption minimization strategy for plug-in hybrid electric vehicles based on traffic information[J]. Energy, 2020, 190: 116409.
[10] 景远, 焦晓红. 基于交通信息和模型预测控制的混合动力汽车能量管理策略综述[J]. 燕山大学学报, 2019, 43(4): 320-330.
JING Y, JIAO X H. Review on energy management strategies for hybrid electric vehicles based on traffic information and model predictive control[J]. Journal of Yanshan University, 2019, 43(4): 320-330.
[11] PU Z, JIAO X, YANG C, et al. An adaptive stochastic model predictive control strategy for plug-in hybrid electric bus during vehicle-following scenario[J]. IEEE Access, 2020, 8: 13887-13897.
[12] HU X, ZHANG X, TANG X, et al. Model predictive control of hybrid electric vehicles for fuel economy, emission reductions, and inter-vehicle safety in car-following scenarios[J]. Energy, 2020, 196:117101.
[13] HE H, WANG Y, HAN R, et al. An improved MPC-based energy management strategy for hybrid vehicles using V2V and V2I communications[J]. Energy, 2021, 225: 120273.
[14] JIAO X, SHEN T. SDP policy iteration-based energy management strategy using traffic information for commuter hybrid electric vehicles[J]. Energies, 2014, 7(7): 4648-4675.
[15] MOSER D, SCHMIED R,WASCHL H,et al. Flexible spacing adaptive cruise control using stochastic model predictive control[J]. IEEE Transactions on Control Systems Technology, 2017, 26(1): 114-127.
[16] ZHANG Z, HE H, GUO J, et al. Velocity prediction and profile optimization based real-time energy management strategy for plug-in hybrid electric buses[J]. Applied Energy, 2020, 280: 116001.
Predictive energy management control for connected hybrid electric vehicles in car-following scenario
CHEN Xiaolong, JIAO Xiaohong
(School of Eletric Engineering, Yanshan University, Qinhuangdao, Hebei 066004, China)
Abstract:
A predictive energy management strategy is designed based on the preceding vehicle′s speed prediction and the ego vehicle′s speed planning by using vehicle-vehicle and vehicle-road communication to solve the comprehensive optimization problems of fuel economy and driving safety in the following scenario of connected hybrid electric vehicles. The preceding vehicle speed predictor is constructed by long short-term memory network, whose hyper-parameters are optimized by particle swarm optimization. Based on the preceding vehicle′s predictive velocity, the ego vehicle′s speed in the forecasted domain is planned to solve the optimization problem by taking the following distance, velocity, acceleration, and vehicle impact affecting driving comfort as the cost function. Furthermore, the sequential quadratic programming algorithm solves the energy management control problem of the comprehensive optimization of vehicle fuel economy and driving safety to derive the optimal power distribution control strategy. Simulations under various driving conditions verify the effectiveness of the proposed predictive control strategy and better fuel economy during the safe following.
Keywords: hybrid electric vehicle; speed predictor; speed planning; energy management; optimization control
