MEMS陀螺半实物仿真系统设计*
2023-03-22王灿斌刘志鹏邢昌达
王灿斌,刘志鹏,邢昌达,李 崇
(中国海洋大学 工程学院·青岛·266100)
0 引 言
MEMS陀螺是惯性传感器的一种,可以用于测量角速度和旋转角度,具有非常广泛的应用范围[1-2],在姿态检测、导航、定位等领域均占有一席之地[3-4]。自DARPA实验室成功研发世界上第一只MEMS陀螺以来[5],其性能随精密加工工艺的发展和机械结构的优化而不断提高。然而,由于现有加工精度和可用调制方法的限制,MEMS陀螺测控方法的发展受到制约。因此,为解决因MEMS固有缺陷所带来的发展受阻问题,将半实物仿真(Hardware-in-loop Simulation,HILS)技术应用在MEMS陀螺上成为了一个新的研究方向。
HILS技术是一种特殊的仿真技术,该技术通过将现实世界中的一些关键对象附加到仿真中,使得此种仿真比一般仿真更为可靠[6]。此外,该技术在高复杂度模型的仿真中也具有很大优势[7],它不需要模拟对象的精确数学模型,因此可以减少系统建模的工作量,缩短研发时间。同时,可以通过HILS系统的输出结果对其数学模型进行校正[8]。因此,将HILS技术应用于MEMS陀螺的机理研究和接口系统开发,为打破MEMS陀螺固有特性的制约提供了新思路。
HILS技术最初的发展地在美国,为了开展对于控制系统的仿真,美国在20世纪40年代建立了一批用于半实物仿真的实验室,在此基础上,半实物仿真技术得到不断发展。在近几十年的发展中,美国各武器研发系统均针对自身需求制定了复杂先进的仿真系统,其中以红石兵工厂的美国陆军航空和导弹司令部高级仿真中心最为著名[9]。将HILS技术应用于MEMS 陀螺研究方案最初是由佐治亚理工学院的Arashk Norouzpour-Shirazi在2016年提出[10],该团队通过构建等效RLC电路对MEMS陀螺进行建模,并对内部参数变化对性能的影响进行了软件仿真。尽管该仿真仅在软件级别实现,并且没有提供硬件工程实例,但这仍为将HILS仿真系统应用于MEMS陀螺提供了参考。
本文首先从MEMS陀螺的基础数学模型出发,分析MEMS陀螺和RLC振荡电路特征方程上的相似性,完成对MEMS陀螺基本的HILS电路模型的设计。然后,在充分考虑MEMS陀螺的模态间耦合、输入输出特性、频率特性等本身性质的基础上,将这些固有特性也添加到HILS系统中。最后,在HILS系统模型设计的基础上,完成HILS系统硬件电路的开发以及对该系统的测试。通过实验结果来证明将HILS技术应用于MEMS陀螺特性仿真及接口电路开发的可行性,以及验证该HILS系统可成为一个可靠的MEMS陀螺内部机理研究和接口电路方案验证的平台。
1 MEMS陀螺的HILS等效电路原理分析与设计
首先进行MEMS陀螺基本动力学分析,阐述其运行的基本原理。而后从MEMS陀螺的基本原理出发,通过对比其单模态动力学方程与RLC电路特征方程的形式[11],说明利用RLC电路模拟MEMS陀螺基本输入输出特性的可行性,为下一节的MEMS陀螺HILS系统硬件电路设计奠定理论基础。
1.1 MEMS陀螺动力学分析
MEMS陀螺是基于科里奥利力效应工作的传感器器件,科里奥利力效应表示传感器件的两个正交共振模式之间因为外部旋转而产生能量传递的效应,又称科氏力。在旋转过程中,原本进行直线运动的质点因为科里奥利力发生偏移,旋转角速度不同,其偏移量大小不同,因此可以通过其偏移量大小得到旋转角速度大小。科里奥利力可以表示为
fC=2mv×Ω
(1)
其中,m为质点的质量,v为质点相对于转动坐标系的运动速度,Ω为旋转的角速度。
MEMS陀螺的两个模态可以等效为两个独立的谐振器,为“阻尼—弹簧—质量块”组成的二阶系统,在受到驱动力的作用以后,质量块会在力的方向上产生简谐运动。与此同时,因为科里奥利力的作用,另一模态会产生科氏力加速度,从而在本身谐振方向上做简谐运动,通过位移信息可得输入的角速度。
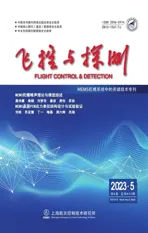
MEMS陀螺的基本物理模型如图1所示,理想情况下,陀螺两个运行模态不存在相互的刚度和阻尼耦合,其数学模型表示如下
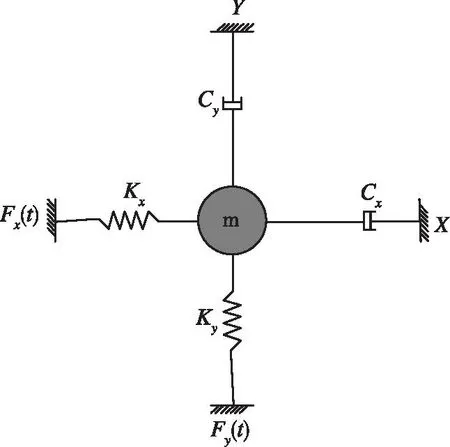
图1 理想陀螺物理模型Fig.1 Ideal gyro physical model
(2)
其中,mx为x模态质量,my为y模态质量。x,y为陀螺的两个振动模态上的位置坐标,dx和dy为两模态沿各自轴的阻尼系数,kx和ky为两模态沿各自轴的刚度系数,Ωz为外部角速度,λ为角度增益系数,fx(t)和fy(t)为两模态的驱动力输入。
实际情况下,两模态难以避免会产生刚度耦合和阻尼耦合。考虑刚度耦合和阻尼耦合的非理想情况下陀螺的物理模型,如图2所示,其数学模型可表述为
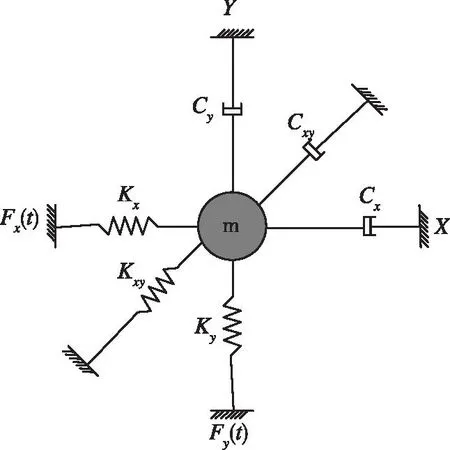
图2 非理想陀螺物理模型Fig.2 Non-ideal gyro physical model
(3)
其中,dxy与kxy为两模态之间的阻尼耦合与刚度耦合系数。
1.2 MEMS陀螺等效电路设计可行性分析
理论上,MEMS陀螺单模态动力学方程为
(4)
其中,x是指质量块在单个振动模态上的位移,k为刚度系数,d为阻尼系数。
公式(4)是一个二阶线性常系数微分方程。RLC串联电路的特征方程与该动力学方程具有相同方程形式,因此选择RLC电路模型作为MEMS陀螺的等效电路模型[8]。
一个基本的RLC串联电路如图3所示,由一个电阻、一个电容和一个电感串联而成。电容两端的电压定义为UC,电阻、电容和电感值分别被定义为R,C和L。在上述电路中满足式(5)、(6)、(7)
图3 RLC振荡电路模型Fig.3 RLC oscillation circuit model
(5)
(6)
(7)
可得RLC电路模型方程如下
(8)
式(8)为RLC电路的模型方程,与式(4)MEMS陀螺的基本动力学方程具有相似形式,由此可得二者具有相似的输入输出特性,故选择RLC串联电路作为MEMS陀螺单模态等效电路,其中的位移和力由电荷和电压表示,速度由电流表示,质量系数m由电感L表示,刚度系数k由电容的倒数1/C表示,阻尼系数d由电阻R表示。采用变压器作为驱动谐振器并感测其位移的转换机构。考虑到MEMS陀螺有两个模态,其基本等效电路的示意图如图4所示。
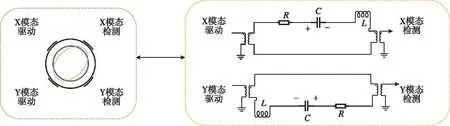
图4 MEMS陀螺与其等效电路模型示意图Fig.4 Schematic diagram of MEMS gyroscope and its equivalent circuit model
图4左侧展示了真实MEMS陀螺的输入输出电极。实际情况下,可通过驱动电极输入正弦信号完成对单个模态的驱动,并通过检测电极来检测角度和角速度信号。图4右侧MEMS陀螺等效电路中,MEMS陀螺单个模态被等效为一个RLC串联电路的闭合回路,可通过驱动模态变压器输入正弦驱动信号,完成对电路的驱动,并通过检测模态变压器检测回路在驱动下产生的信号,完成对MEMS陀螺驱动和检测的模拟。
2 硬件电路实现
在MEMS陀螺等效电路中,模态间的耦合与模态自身的耦合以受控源的方式实现,受控源指的是受电路中其他电流或电压信号控制的电流源或电压源,主要分为四种,分别是电压控制电压源(Voltage Controlled Voltage Source,VCVS)、电流控制电压源(Current Controlled Voltage Source,CCVS)、电压控制电流源(Voltage Controlled Current Source,VCCS)、电流控制电流源(Current Controlled Current Source,CCCS)[12]。在本设计中,涉及的受控源有电压控制电压源与电流控制电压源。由第1章中MEMS陀螺HILS系统电路原理可知,系统主要分为五个功能板块,分别是电源、阻尼耦合、刚度耦合、角速度输入、主体谐振电路。下面将对这些功能对应电路做详细的描述。
2.1 MEMS半实物仿真系统功能实现
2.1.1 阻尼耦合电路设计
由于加工工艺限制,陀螺机械结构存在不同程度的结构不对称性,这导致两模态之间存在阻尼耦合与刚度耦合,使得陀螺存在同相误差与正交误差。阻尼耦合在等效电路中的表达式为Rxyiy与Ryxix,可以等效为将y模态中的电流iy放大Rxy倍,或者将x模态中的电流ix放大Ryx倍,因此称为电流控制电压源。其实现方式如图5所示,其中Ix,Iy代表x模态和y模态的电流,Ryx代表y模态与x模态间的耦合电阻值,此图以x模态在y模态的耦合项为例。
2.1.2 刚度耦合电路设计
刚度耦合在等效电路中的表达式定义为VQx=(Cy/Cyx)VCy与VQy=(Cx/Cxy)VCx,等效为将x模态电容两端的电压放大Cx/Cxy倍、将y模态电容两端的电压放大Cy/Cyx倍,然后通过互感器耦合到另一模态上,采用电压控制电压源的方式实现,其实现方式如图6所示,其中C代表等效电路中的电容,将电容两端的电压放大并耦合到另一模态,该图以x模态在y模态的耦合项为例。
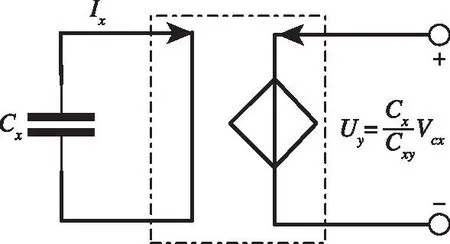
图6 刚度耦合实现电路示意图Fig.6 Schematic diagram of stiffness coupling implementation circuit
2.1.3 科里奥利力输入电路设计
科里奥利力在等效电路中的表达式定义为2LmλΩziy与-2LmλΩzix,其中Lm为两模态间耦合电感,等效为将x模态上的电流或者y模态上的电流放大-2LmλΩz与2LmλΩz倍,然后耦合到另一模态上。为实现不同的角速度输入,角速度输入Ωz用电压等效,即将x模态上的电流或者y模态上的电流放大-2Lmλ与2Lmλ倍,继而输入至乘法器的一个输入端,乘法器的另一输入端引入表征角速度Ωz的等效电压。科里奥利力输入的实现电路示意图如图7所示。该示意图以x模态作为驱动模态、y模态作为检测模态,将x模态电流放大-2Lmλ倍,然后通过增益可调乘法器(Variable Gain Amplifier,VGA)将电流放大Ωz倍,即引入角速度,最后将输出耦合至y模态,即科里奥利力输入。
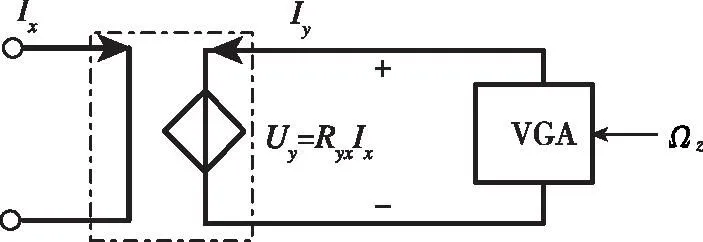
图7 科里奥利力输入实现电路示意图Fig.7 Coriolis force input implementation circuit schematic diagram
2.1.4 调谐电压输入电路设计
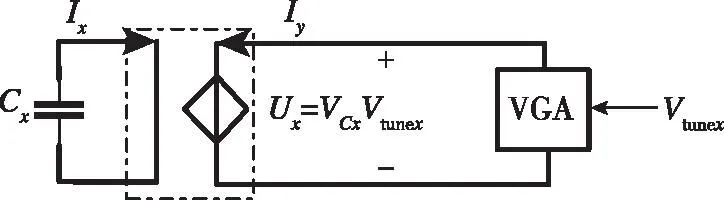
图8 调谐电压输入实现电路示意图Fig.8 Schematic diagram of tuning voltage input implementation circuit
2.2 MEMS半实物仿真系统电路实现
2.2.1 电源电路
为满足乘法器及运算放大器供电要求,供电采用±10V电源供电,并加入4.7μF与0.1μF电容滤波以降低外部干扰对电源的影响,供电电路图如图9所示。
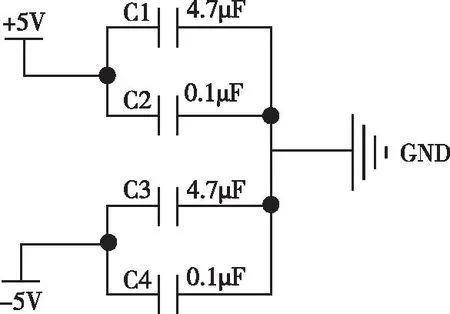
图9 电源供电原理图Fig.9 Power supply schematic diagram
2.2.2 刚度耦合电路
刚度耦合是将谐振电路的电容两端的电压差放大Cy/Cyx倍,然后耦合到另一模态上。为避免对谐振电路产生谐振点影响,采用电压跟随器采集电容两端的电压,两电压从两运算放大器的正输入端引入,然后通过乘法器将压差乘Cy/Cyx倍,输入到另一模态中,完成刚度耦合。刚度耦合电路原理图如图10所示。
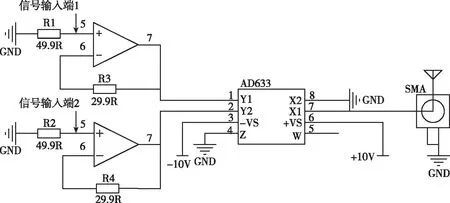
图10 刚度耦合原理图Fig.10 Stiffness coupling principle diagram
2.2.3 阻尼耦合电路
阻尼耦合是将谐振电路中的电流与耦合电阻相乘,即为跨阻放大电路。为了可以任意设定耦合电阻大小,将跨阻放大器的电阻更换为可变电阻。电流信号可从互感器获取,阻尼耦合电路原理图如图11所示。
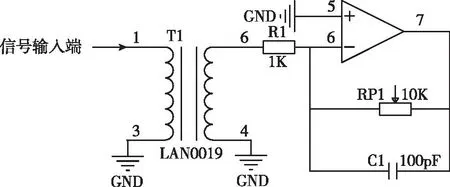
图11 阻尼耦合原理图Fig.11 Damping coupling principle diagram
2.2.4 角速度输入电路
等效角速度即科里奥利力的表达式为2LmλΩzix/y,相当于将两模态的电流乘以2LmλΩz倍,然后耦合到另一模态中。在本设计中,将2Lmλ等效为电阻,角速度Ωz等效为电压,则2LmλΩzix/y可以等效为2Lmλix/y电压与Ωz电压相乘。科里奥利力输入的电路原理图如图12所示。
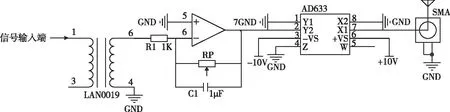
图12 角速度输入电路原理图Fig.12 Schematic diagram of angular rate input circuit
2.3 MEMS陀螺等效电路完备性设计
2.3.1 阻尼耦合项、刚度耦合项和角速度输入功能设计
由于实际MEMS陀螺存在刚度耦合项、阻尼耦合项及角速度输入功能,因此本文设计的HILS等效电路模型若要完整模拟MEMS陀螺特性,则RLC等效电路中也应添加实际MEMS陀螺中的刚度耦合项和阻尼耦合项及角速度输入功能。如2.1.1,2.1.2和2.1.3中所设计的受控源电路,刚度耦合项、阻尼耦合项及角速度输入功能都将以受控源的形式实现。包含上述三种功能的HILS模型电路的示意图如图13所示,蓝色区域是刚度耦合项、阻尼耦合项和等效角速度输入项,通过引入三个受控源电路,可将一个模态产生的信号输入到另一个模态中,实现刚度耦合和阻尼耦合,并完成等效角速度的输入。
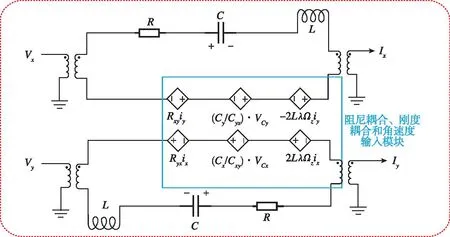
图13 含有刚度耦合项、阻尼耦合项、等效角速度输入项的等效电路示意图Fig.13 Equivalent circuit diagram containing stiffness coupling term,damping coupling term,and equivalent angular rate input term
2.3.2 谐振频率调节和Q值调节设计
由于加工批次的不同,不同陀螺的谐振频率和Q值是会产生变化的。为了满足模拟不同陀螺的工作要求,应设置谐振频率和Q值调节功能。
RLC串联电路的方程为关于电容电压UC的常系数二阶微分方程。其特征方程为
(9)
对该式求解可得
(10)
因此,MEMS陀螺等效HILS电路的谐振频率可以用以下公式表示
(11)
由式(11)可得,可以通过调整电感L和电容C的值来进行谐振频率的调节,具有调谐功能的电路如图14所示,其中蓝色区域代表频率调节功能模块,通过受控源引入调谐电压,两模态电容两端的电压与所需调节电压相乘,然后通过互感器耦合至自身模态,完成调谐功能。当电路工作在谐振状态时,电路中电感的阻抗和电容的阻抗大小相等,符号相反。
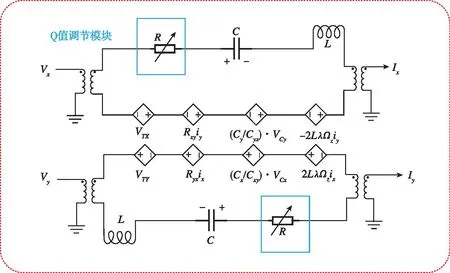
图14 具备调谐电极的陀螺等效模型电路示意图Fig.14 Schematic diagram of the equivalent model circuit of a gyroscope with tuning electrodes
在 RLC 谐振电路模型中,根据品质因数Q值定义,电路工作在谐振状态时,电路中电感的阻抗ZL和电容的阻抗ZC大小相等,符号相反。因此,MEMS 陀螺的 Q 值可以由以下公式表示
(12)
具有Q值调节功能的HILS模型电路如图15所示,其中蓝色区域代表Q值调节功能,将原RLC电路中电阻替换为可变电阻,由公式(12)可知,可通过调节电阻的值R实现Q值的调节。
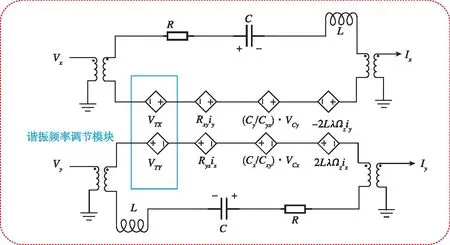
图15 具备调谐电极与Q值调节功能的MEMS陀螺等效电路模型Fig.15 MEMS gyroscope equivalent circuit model with tuning electrode and Q value adjustment function
2.4 总体电路实现
总体谐振电路中包含了可调电阻、可调电容、工字电感、激励输入端、信号输出端等基本谐振电路所需器件。除此之外,还接入了互感器实现耦合信号的输入与输出。同时,为方便调试,将每一个节点处接入跳线帽,通过调节跳线帽的插拔来按照需求引入耦合量,便于测试。
陀螺等效电路3D电路图及其与等效电路模型图对应关系示意图如图16所示,图中红色部分为HILS系统模型的两个模态驱动输入接口,黄色部分为刚度耦合、阻尼耦合模块以及调谐电压,绿色部分为等效角速度输入功能模块,蓝色部分为两模态信号的检测接口。
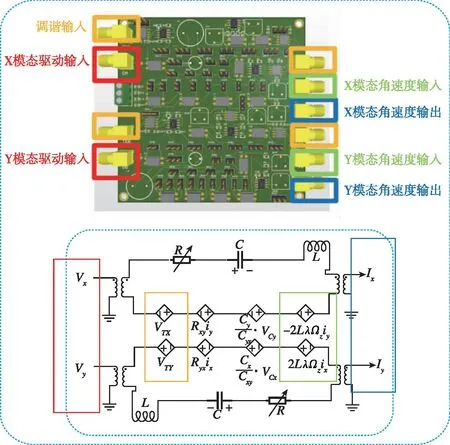
图16 陀螺等效电路3D电路图及其与等效电路模型图关系示意图Fig.16 3D circuit diagram of the gyroscope equivalent circuit and its relationship with the equivalent circuit model diagram
HILS模型的硬件如图16中所示,包括功率输入、驱动信号输入、调谐输入、检测信号输出和角速度输入。电源采用线性电源,提供±5V直流电压,并将等效角速度输入端连接到信号发生器。调谐输入根据所需的输入直流电压进行调谐。
连接完成后,进行系统测试,其测试结果将在下一章中进行展示。
3 MEMS陀螺HILS模型测试
3.1 频率特性模拟
通过改变电感和电容的值,HILS模型电路可以模拟不同谐振频率的两种模式。该HILS模型电路的幅频和相频及特性如图17所示。在引入正弦驱动信号的情况下,x模态可读出检测信号,其谐振频率在79625Hz;y模态在引入相同驱动信号的情况下,可读出检测信号,其谐振频率在84543Hz。两模态相位信号变化均符合二阶系统预期响应,相位改变-180°。从实验结果可以看出,两种模式都可以在预期的谐振频率下振荡,两种模式的谐振频率存在一定的差异。
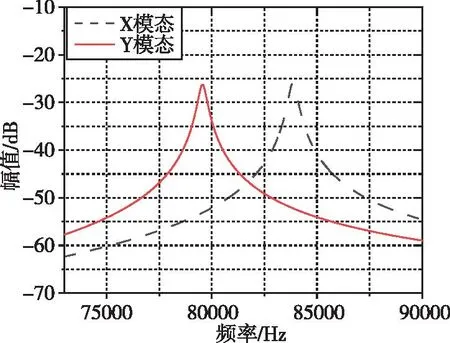
(a) 幅频特性
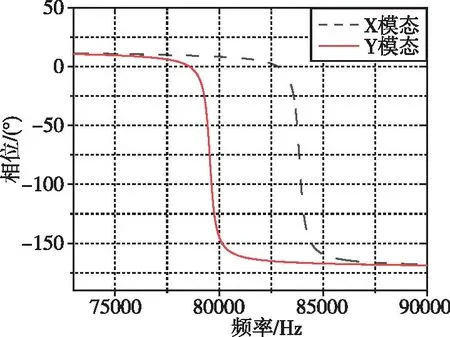
(b)相频特性图17 频率特性Fig.17 Frequency characteristics
3.2 模态匹配和Q值调节模拟
在该HILS模型电路中引入调谐电压,对其中一个模态谐振频率进行微调,使该模态的谐振频率与另一种模态重合或分裂,从而完成谐振频率调整。实验结果如图18所示,从实验结果可以看出,在单模态引入+5V调谐电压之后,谐振频率点向右移动,其谐振频率从79625Hz转移到了84532Hz,接近于另一模态谐振频率,因此,该HILS系统模型可通过引入调谐电压实现模态匹配,满足电压调谐的要求。
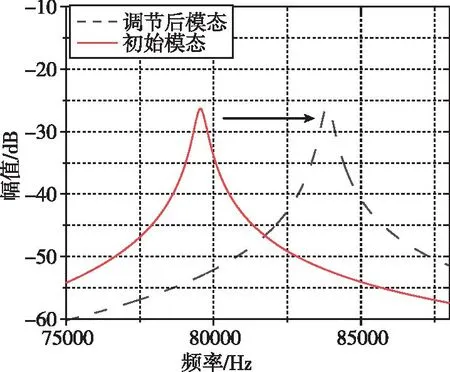
图18 模态调谐示意图Fig.18 Schematic diagram of modal tuning
为了模拟不同Q值的陀螺,在HILS系统等效电路中增加了Q值调整功能,不同Q值电路的幅频特性如图19所示,Q值越高,响应幅值越高,在HILS系统电路中,通过改变可变电阻的阻值实现了单模态谐振幅值从-40dB到-32dB的提升,实现了调整Q值功能。从实验结果可以看出,该系统可以在不改变谐振频率的情况下实现Q值的调整,可以满足不同Q值的陀螺的仿真。
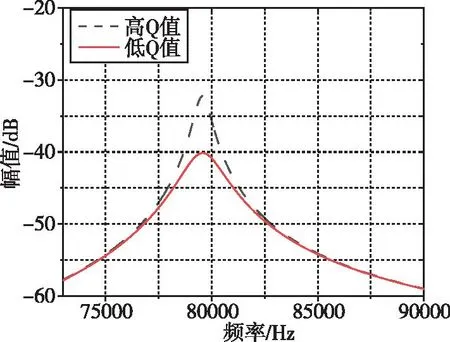
图19 Q值调节幅频特性Fig.19 Q value adjustment amplitude-frequency characteristics
3.3 等效角速度测试
为了模拟有角速度输入时陀螺的工作状态,本文所设计的MEMS陀螺的HILS系统中增加了等效科里奥利力输入部分。在激励相同但角速度输入不同情况下的检测模态幅值如图20(a)和图20(b)所示。从实验结果可以看出,如图20(a)所示,在引入20(°)/s的角速度时,驱动模态和检测模态的谐振峰值分别在11dB和-30dB;如图20(b)所示,在引入10(°)/s的角速度时,驱动模态和检测模态的谐振峰值均发生改变,其值分别在5dB和-55dB,因此该等效电路可以模拟不同角速度下陀螺的输入功能。
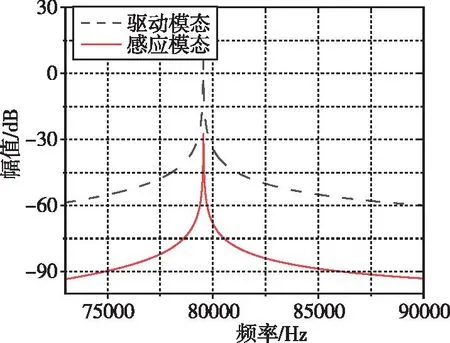
(a) 大角速度输入幅频特性
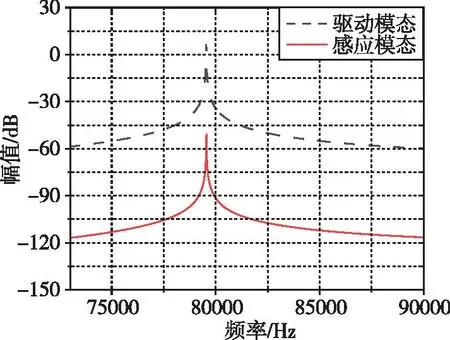
(b) 小角速度输入幅频特性图20 等效角速度输入测试Fig.20 Equivalent angular rate input test
3.4 角速度输入测试
角速度输入测试方法为通过锁相放大器的锁相环使驱动模态一直工作在谐振频率处,通过检测模态输出幅值来判断角速度输入大小。不引入角速度时的检测模态幅值如图21(a)所示,该等效电路的底噪幅值约为2.73mV,其中横坐标代表时间,纵坐标代表电压。引入等效正弦角速度时检测模态幅值如图21(b)所示,检测模态的信号也为正弦信号,其幅值可达47mV,该HILS仿真模型具有良好的信噪比。
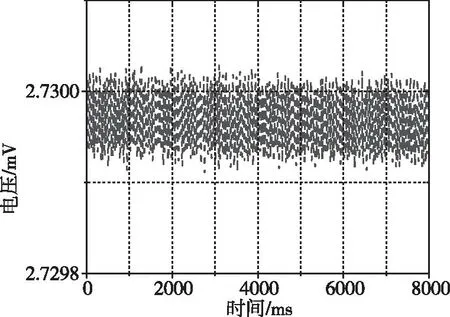
(a) 无角速度输入时检测模态输出
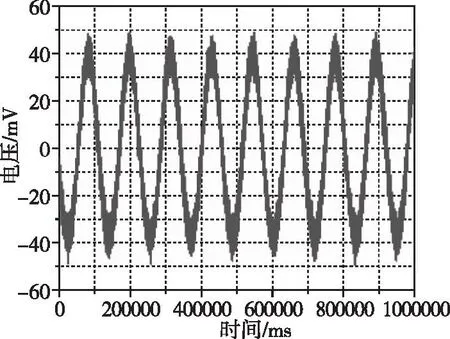
(b) 输入正弦角速度时检测模态输出图21 角速度输入测试Fig.21 Angular rate input test
由实验结果图分析可知,检测模态的输出也为正弦信号,即等效电路可以实现旋转信号输入与检测功能,可以根据输入外部角速度时的状况进行仿真。
从本节的实验结果可以证实,本文设计的HILS系统可以完成MEMS陀螺内部运行机理的仿真,可以调整参数,并代替MEMS陀螺测试陀螺的前端模拟电路和数字系统。
4 总结与展望
本文开发了MEMS陀螺的HILS系统,并完成了该系统的实验验证。HILS模型可以为陀螺接口电路的设计提供实验平台,缩短开发过程。同时,也为MEMS陀螺的内部机理研究提供了一个研究平台。未来,可基于HILS系统平台,对MEMS陀螺的不同调制方式进行更多的研究,MEMS陀螺的接口电路的设计和验证也可以依托HILS系统进行,用以验证所设计的接口电路的可靠性和普适性。