类蛛网状盘式谐振微陀螺的抗冲击性能与结构误差仿真分析*
2023-03-22郭述文
樊 波,郭述文
(1.南华大学 电气工程学院·衡阳·421001;2.苏州大学 微纳传感技术研究中心·苏州·251001;3.华东光电集成器件研究所·蚌埠·233040)
0 引 言
基于微纳加工技术的微机械陀螺因尺寸小、成本低、功耗低,以及易于与信号处理电路集成等优势,目前已经占据了大部分消费类电子、汽车电子、工业控制、安全检测等中低端应用场景[1]。为了拓展高端应用场景市场,具有中心对称、低锚定损耗、大模态质量和免疫外部振动等特点的盘式谐振微陀螺成为近年来微机械陀螺主流的研究方向[2]。
目前国内外主要采用两种方案设计高性能盘式谐振微陀螺。一种方案为通过结构参数优化实现,斯坦福大学通过有限元仿真分析了环宽、环数、辐条角度、辐条宽度等结构参数对谐振频率和品质因数的影响,并通过分析结果优化了盘式谐振微陀螺性能[3];国防科技大学通过采用粒子群算法对环宽和辐条长度等结构参数进行优化,改进了陀螺的品质因数、机械灵敏度和机械热噪声等性能参数[4-5]。另一种方案主要为优化陀螺敏感结构,加州大学欧文分校提出了外锚点内电极的盘式谐振微陀螺,工作在模态阶数n=3的酒杯模态,具有极佳的标度因子稳定性[6];斯坦福大学提出在盘式谐振微陀螺环与环之间设置双电极的方案,大幅度增加了电容传感面积[7];美国ADI公司提出了复合环内外双锚点的盘式谐振微陀螺,能有效提高角增益[8];国防科技大学提出了悬挂质量块的优化方案和蜂窝状盘式谐振微陀螺,能有效提高品质因数和制作误差对结构频率裂解的鲁棒性[9-10]。本研究小组近年来利用直线形结构工艺误差小于弧形结构的工艺特点提出了一种全线性结构的类蛛网状盘式谐振微陀螺,并结合悬挂质量块,可有效提高品质因数和减少工艺误差[11]。
为了解类蛛网状盘式谐振微陀螺的结构特性、抗冲击性能和非理想情况工作频率特性,则需要建立准确的理论模型。因此本文采用有限元软件进行模态分析和过载分析,并开展结构误差的频率裂解仿真研究。
1 结构介绍及其工作原理
类蛛网状盘式谐振微陀螺由10个同心的正十六边形环组成,通过八个辐条交替连接到中心锚点。每个环由16个相同的矩形梁端到端连接。小实心质量块被悬挂在从内到外的奇数层环和偶数辐条层。相邻的正十六边形谐振环与辐条之间形成凹槽,所述凹槽内设置有双层电极,目的是增加驱动和检测的传导面积以及频率调谐能力。正多边形结构全部采用直线连接,谐振器近似多环圆盘结构,实为全线形结构,没有圆弧线。因此,边缘误差效应小,对称性误差相对较小,2个工作模态谐振频率裂解小[12]。其结构如图1所示。

图1 类蛛网状盘式谐振微陀螺敏感结构示意图Fig.1 Structural schematic of micro cobweb-like disk resonator gyroscope
该结构为轴对称陀螺敏感结构,工作振动模式为具有一对平面内椭圆弯曲的振动模式,驱动模态和敏感模态的波腹角相差45°,但相位差为90°,这种振型也被称为四波腹振型,即n=2酒杯模态振型,其工作振型如图2所示。这意味着当陀螺敏感结构在0°方向产生恒幅振动时,有Z轴角速度输入,会在45°方向上产生位移。
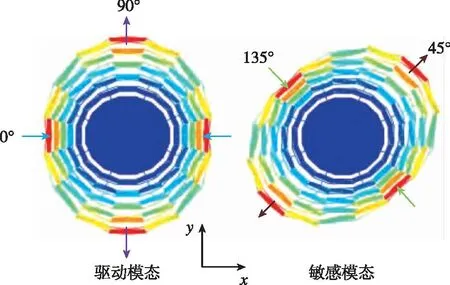
图2 类蛛网状盘式谐振微陀螺n=2酒杯振型Fig.2 n=2 wineglass mode shape of micro cobweb-like disk resonator gyroscope
2 结构特性仿真分析
陀螺芯片的结构形状和结构参数决定了谐振模态、抗冲击等结构特性,陀螺芯片采用(111)单晶硅材料,经过绝缘体上硅(Silicon-on-Insulator,SOI)工艺加工制作而成,其结构参数和主要材料属性分别如表1和表2所示,通过模态分析和冲击分析得到谐振频率、最小寄生模态频差(即寄生模态与工作模态之间最小频差)和最大冲击载荷加速度等性能参数。

表1 类蛛网状盘式谐振微陀螺敏感结构参数Tab.1 Structure parameters of micro cobweb-like disk resonator gyroscope
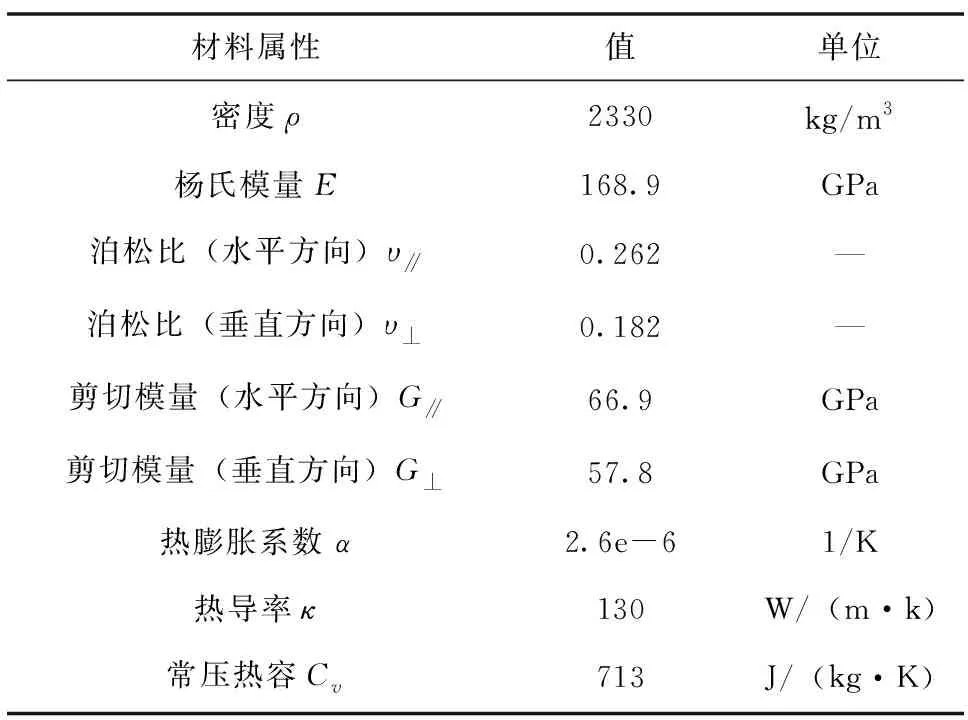
表2 常温(T=298.15K)下(111)单晶硅材料属性Tab.2 Properties of (111) single crystal silicon at room temperature (T=298.15K)
2.1 模态分析
对于类蛛网状盘式谐振微陀螺而言,确定谐振器工作模态谐振频率以及寄生模态频差对陀螺性能极为重要。其中谐振频率是谐振器性能指标的重要参数,寄生模态频差过小可能会降低品质因数和引入混模干扰,甚至导致陀螺无法正常工作。因此需采用模态分析研究陀螺敏感结构的固有频率和模态振型等特性。本文在不考虑结构误差的情况下,采用有限元软件对陀螺进行模态分析,提取并分析了前10阶模态的频率和振型。
在有限元分析软件中,模态分析是利用系统固有的模态的正交性,建立用模态坐标和模态参数所描述的模态方程,并通过模态叠加法对其进行求解,并基于以下3个假设:
1)载荷具有时不变性;
2)刚度和质量矩阵为常量;
《指路经》在西南少数民族的葬礼中比较普遍。苗族的《指路经》,内容从死者出生开始说起,讲到他(她)出生的地方(也是埋衣胞的地方),他(她)为什么死,他(她)离开家如何去到祖先亡灵所在的地方,路上如何应答,如何过河,如何辨认谁是祖先,等等。
3)在未使用阻尼特征求解法情况下,不考虑阻尼效应。
通过参数化建模,设置材料属性和边界条件,以及采用网格划分后,再利用特征频率法对谐振器进行求解,计算得前10阶模态频率和模态振型分布,如表3和图3所示。

表3 类蛛网状盘式谐振微陀螺前10阶模态谐振频率Tab.3 First 10 order modal resonance frequency of micro cobweb-like disk resonator gyroscope
(a) 第1阶 面外翘曲振动模态(0°方向) (b) 第2阶 面外翘曲振动模态(45°方向)

(c) 第3阶 面外摇摆振动模态(0°方向) (d) 第4阶 面外摇摆振动模态(90°方向)

(e) 第5阶 X轴摆式振动模态 (f) 第6阶 Y轴摆式振动模态

(g) 第7阶 n=2阶酒杯式振动模态(0°方向) (h) 第8阶 n=2阶酒杯式振动模态(45°方向)
其中,第1、2阶模态沿Z轴方向弯曲振动,互成45°方向、面外翘曲振动模态(图3(a)、(b)),谐振频率约为8.7kHz。第3、4阶模态沿Z轴方向上下摇摆,互成90°方向、面外摇摆振动模态(图3(c)、(d)),频率约为11.1kHz。第5、6阶模态分别在XY平面内沿X轴左右摇摆和沿Y轴前后摇摆,为X轴摆式振动模态和Y轴摆式振动模态(图3(e)、(f)),频率约为14.9kHz。第7、8阶模态在XY平面内互成45°角两个方向的椭圆弯曲振动(四波腹振动),且两个模态的波节点和波腹点互为相反对应关系,即n=2酒杯式振动模态(图3(g)、(h)),两模态谐振频率约为18.8kHz。第9、10阶模态在XY平面内互成30°角两个方向的三叶草式振动,为n=3酒杯式振动模态(图3(i)、(j)),频率约为23.6kHz。其中第7阶和第8阶模态为工作模态,其与前后相邻寄生模态频率的频差约为3.9kHz和4.8kHz,较大的频差可有效避免模态间的耦合。同时,两工作模态谐振频率在设计时完全匹配,可实现机械灵敏度最大,且机械热噪声最小。依据仿真结果,陀螺谐振器的结构参数满足模态匹配设计的原则,且能有效抑制寄生模态耦合效应。
2.2 冲击分析
MEMS陀螺从实验室到工程化转换阶段,抗冲击能力是其重点考虑的问题之一。机械冲击定义为短时间施加于机械系统或其一部分的剧烈且非周期性的载荷作用,常见有半正弦脉冲、梯形脉冲等[13]。冲击仿真分析采用有限元软件的瞬态响应分析方法,研究MEMS陀螺敏感结构在强瞬态冲击载荷下的应力分布。
在MEMS陀螺中,最常见的冲击失效现象是断裂。根据Von Mises屈服准则,当最大应力畸变能密度大于或者等于材料单向拉伸屈服时的畸变能密度时,结构会发生断裂。晶体硅为一种纯脆性材料,为了尽量减少在给定的冲击水平下断裂的可能性,其中一个设计标准是保持最大Von Mises应力低于1GPa[14]。
为模拟冲击环境下的过载特性,通过有限元软件在X、Y、Z三轴方向上对陀螺敏感结构施加脉宽为2ms的半正弦冲击载荷,选择幅值分别为15000g、20000g、25000g和30000g(g=9.98m/s2,为重力加速度),分析该结构在冲击载荷下的瞬态响应,明确其抗动态冲击过载能力。图4(a)和(b)分别为MEMS陀螺在X(Y)轴和Z轴冲击载荷下其敏感结构最大Von Mises应力的时间响应曲线。显然,在相同载荷下,由于结构完全对称,在平面内X轴和Y轴方向所受的最大Von Mises应力基本一致,而在Z轴方向小于平面内X轴和Y轴方向所受最大Von Mises应力。这是由于Z轴方向摆式振动模态的谐振频率高于平面内摆式振动模态,也说明谐振器在Z轴方向可承受更大的加速度冲击载荷。陀螺敏感结构在X轴方向25000g的加速度冲击载荷下最大Von Mises应力为974.6MPa,而在30000g的冲击载荷下最大Von Mises应力为1169.5MPa。根据设计标准,陀螺敏感结构可承受25000g的加速度冲击载荷。这表明该结构的抗冲击性好,可承受高加速度冲击载荷而无需任何特殊保护。

(a) X(Y)轴方向冲击载荷

(b) Z轴方向冲击载荷图4 冲击载荷下陀螺动态响应曲线Fig.4 Dynamic response curves of the gyroscope under impact load
一般不同的应用环境产生的冲击强度不一致。常见的应用环境要求能够承受7000g以下的冲击强度。如汽车应用中,要求安全气囊传感器在20~50g的冲击环境下工作,爆震传感器需在1000g的冲击环境下工作。其他汽车应用要求设备能承受3000g的冲击强度[15]。在恶劣的环境中,则需要承受更高的冲击强度,通常为10000g以上。如油气勘探中传感器需要承受20000g的冲击力;在军事应用中,制导导弹的炮弹发射往往需要承受高冲击,过载加速度载荷可达15000g以上[16]。根据冲击分析结果,类蛛网状盘式谐振微陀螺适用于所有常见的应用环境,甚至部分恶劣环境。
3 结构误差分析

(a) (b)

(c) (d)图5 SEM图:CDRG的整体结构图(a)和局部放大图(b),以及RDRG的整体结构图(c)和局部放大图(d)Fig.5 SEM photos:a fabricated CDRG:overview (a) and magnified view (b);a fabricated RDRG:overview (c) and magnified view (d)
3.1 晶向误差
研究(111)单晶硅晶向误差对频率裂解的影响,首先需确定晶向误差来源。对于SOI晶圆,有两种常见的公差规范:晶圆平面(Wafer-flat,晶圆的顶部表面)切割对准失配和晶圆主平面定位误差[17]。根据制造商提供的规范,本研究使用的晶圆切割对准误差为[111]晶向0.2°,晶圆定位误差为[110]晶向0.5°。
为确定晶向误差对频率裂解的影响,首先要通过线性本构方程找到晶向误差对应的刚度矩阵。由于单晶硅的单位单元是面心立方晶格,因此,(100)单晶硅相对于固定笛卡尔坐标系的刚度矩阵为[18]
(1)
其中弹性常数的值给出如下[18]
C11=165.7GPa,C12=63.9GPa,
C44=79.6GPa
(2)


(a) 两种晶圆的坐标系配置
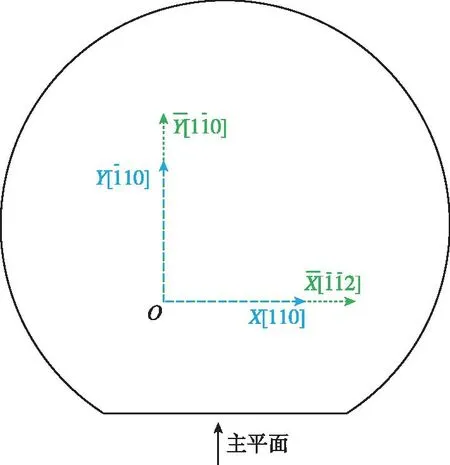
(b) 两种晶圆的顶视图图6 (100)和(111)单晶硅晶圆的坐标系统和顶视图Fig.6 Coordinate systems and overhead views of the (100) and (111) single crystal silicon wafers
(3)
(4)
(5)
其中,
(6)

σ′=Mσ
(7)
其中,
M=
ε′=Nε
(8)
其中,
N=

C′=MCN-1
(9)
取不同的θ值,得到不同的刚度矩阵C′。采用上述分析方法也可获得晶圆切割失配误差对应的刚度矩阵C′,均可通过Matlab编写代码求解得到所需刚度矩阵。将刚度矩阵代入有限元分析软件中,仿真计算得到[110]和[111]晶向偏转角度情况下的频率失配,仿真结果如图7所示[11],其中红色直线和蓝色直线分别表示RDRG和CDRG的频率裂解与晶向误差的关系。

图7 由晶向误差引起的 CDRG和RDRG频率裂解仿真结果Fig.7 Simulation results of CDRG and RDRG frequency splitting caused by crystal orientation error
仿真结果表明,沿[111]晶向(Z轴)的角度偏转对频率裂解没有影响,如图7中虚线所示。这是由于对于(111)单晶硅,杨氏模量、泊松比和剪切模量是水平方向和垂直方向各向同性的[18],垂直方向的偏角对水平方向振动模态的谐振频率没有影响。图7还描述了两种结构在[110]晶向上的定位误差与频率裂解的关系。显然RDRG频率裂解的晶向误差敏感度为23.18Hz/(°),而CDRG为16.8Hz/(°);CDRG频率裂解的晶向误差敏感度相较于RDRG降低了27.53%,说明类蛛网状盘式谐振微陀螺频率裂解对晶向误差的敏感度更低。
3.2 工艺误差
在加工过程中,掩模版的精度限制、光刻缩放,以及DRIE刻蚀工艺的lag效应和刻蚀速率非均匀等都会影响陀螺敏感结构成品的对称性,造成频率失配。其中由DRIE刻蚀引起的环宽非均匀是造成频率分裂的重要原因[21],故需要通过仿真环宽非均匀性来表征工艺误差对频率裂解的影响。实际加工过程中形成的环宽非均匀具有随机性,有限元分析软件难以模拟,可将其等效为在均匀环上某一方向上增加或者减少环宽。本文通过有限元分析软件建立理想模型,并在圆环状盘式谐振陀螺模型每个环的0°方向上附加圆弧角为22.5°的弧形梁,以及对类蛛网状盘式谐振陀螺模型每个环的0°方向上附加等角的直梁来模拟环宽非均匀 (见图8(a))[11],其中附加梁宽为ΔW,用以表征工艺误差,均匀环宽为W0。

(a) 环宽非均匀等效模型

(b) 仿真结果图8 工艺误差对CDRG和RDRG频率裂解的仿真结果Fig.8 Simulation results of process error on frequency splitting of CDRG and RDRG
为分析ΔW对频率裂解的影响,采用有限元软件对ΔW进行参数化仿真,设置范围为0~1μm,间隔为0.1μm,应用固体力学模块,采用特征频率法求解谐振频率,得到两种结构频率裂解与ΔW的关系,如图8(b)所示[11]。从图中可知,CDRG和RDRG的频率裂解对应斜率分别为76.7Hz/μm和84.8Hz/μm。CDRG的环宽非均匀误差敏感度相较于圆环状盘式谐振陀螺降低了9.55%,说明类蛛网状盘式谐振微陀螺对工艺误差的鲁棒性更高。
综上所述,由仿真分析结果可以看出,类蛛网状盘式谐振陀螺对结构误差的敏感度低于圆环状盘式谐振陀螺,可见类蛛网状盘式谐振陀螺具有更佳的结构误差鲁棒性。
4 结 论
本文通过有限元软件对类蛛网状盘式谐振微陀螺的模态频率、抗冲击等结构特性进行了研究,并进行了结构误差对频率裂解影响的仿真分析。仿真结果表明,类蛛网状盘式谐振微陀螺具有抗高过载的优异性能,且对结构误差的鲁棒性优于圆环状盘式谐振陀螺。这说明该结构具有高性能潜力且可应用于恶劣环境。