MEMS陀螺噪声理论与模型综述*
2023-03-22聂伟豪刘梦祥
聂伟豪,焦 娟,刘梦祥,姜 波,周 怡,苏 岩
(南京理工大学 机械工程学院·南京·210094)
0 引 言
陀螺仪是测量载体相对惯性空间运动角速度和角度的传感器,高性能的硅微机电系统(Micro Electro Mechanical Systems,MEMS)陀螺仪在惯性导航、制导、控制等领域中具有至关重要的作用。目前,国内外MEMS陀螺大多工作在模态匹配闭环检测模式下,以此提高陀螺的整体性能[1],如提升标度因数稳定性,获得高机械灵敏度,同时不会过多地损失测量带宽。但是,陀螺闭环检测与控制电路是复杂的机电混合系统,系统中的噪声源一旦变多,多种噪声源共同引起谐振时信号相位和幅度的抖动。因此需要研究陀螺各部分噪声产生机理,构建陀螺闭环系统的相位噪声模型和幅度噪声模型,从而对MEMS陀螺噪声性能进行评估与预测。本文主要围绕MEMS陀螺噪声源理论分析和系统噪声模型的构建展开调研,分析讨论了国内外研究机构在MEMS陀螺噪声理论研究与噪声模型构建上的思路和进展,为后续提高MEMS陀螺噪声性能提供参考。
1 MEMS陀螺噪声理论研究
1.1 MEMS陀螺噪声表征方法
噪声是一个随机过程,通常使用一定时间段内信号幅度平方的平均值来表示。噪声在频域上主要使用功率谱密度函数来表征,体现在主谱线两旁连续分布的噪声边带,具有频谱不纯净的特点。另一种常用的表征方法为Allan方差[2],能够直观地反映MEMS陀螺的性能水平。一般情况下两种表征方法可以相互转换。与Allan方差相联系的随机漂移误差源包括:零偏不稳定性(Bias Instability,BIS)、量化噪声、角度随机游走(Angular Random Walk,ARW)、速率随机游走(Rate Random Walk,RRW)、速率斜坡。这五种误差源在Allan方差图中具有不同的斜率,如图1所示。零偏不稳定性和角度随机游走是力平衡模式下的主要性能指标,当对角速率速度信号进行积分时,角度误差的标准差最开始由角度随机游走占主导,当积分时间变大,零偏不稳定性成为主要因素。

图1 Allan方差各误差源Fig.1 Error sources of Allan variance
1.2 MEMS陀螺谐振系统中的噪声源
在MEMS陀螺结构以及测控电路构成的谐振系统中包含多个噪声源,如机械热噪声、前端放大器噪声、偏置电压噪声等,这些噪声源基本上由热噪声和闪频噪声构成。MEMS陀螺及电路中的热噪声决定了角度随机游走,电路中晶体管、场效应管等器件产生的闪频噪声决定了陀螺零偏不稳定性,所以将各噪声源分为热噪声与闪频噪声进行概述。
1.2.1 MEMS陀螺热噪声研究
由于硅微谐振式陀螺仪结构尺寸非常小,封装腔内气体分子的无规则运动会对可动结构,如检测质量块、谐振梁等产生碰撞,从而形成机械热噪声。机械热噪声会产生在敏感检测方向的振动,作用效果与科氏力相同,会被接口电路检测为角速度输入。但是,机械热噪声产生的振动极其微弱,没有办法直接测量,需要经过接口电路对信号进行放大,与此同时又会引入前端放大器输入噪声。多种噪声使噪声分析变得复杂,所以不断地有学者对机械热噪声结合其他类型噪声在测控电路中的传递过程和噪声模型的构建进行研究。最早在1993年,T. B. Gabrielson[3]比较系统地研究了机械热噪声,并应用等效电学模型来分析,他阐述了机械热噪声只取决于温度和机械阻尼的大小,是一种白噪声,功率谱密度在整个频带内是均匀的,可以等效为沿着阻尼方向施加的大小随机的力,其功率谱密度如下
(1)
式中,kB为玻耳兹曼常数,T为绝对温度,c0为阻尼系数,Q为品质因数,m为陀螺结构质量,ω0为谐振频率。同样,电路中的电阻和晶体管也会由于内部带电载流子的无规则运动,向电路引入热噪声。电阻热噪声可以用一个电压源来模拟,晶体管热噪声主要在沟道中产生,可以用一个连接源漏两端的电流源来模拟,两者的功率谱密度为
SR(f)=4kBTR
(2)
SM(f)=4kBTγgm
(3)
式中,R为电阻值,γ为沟道深宽比相关的常系数,长沟道晶体管为2/3,gm为晶体管跨导,f为频率。
随后,V. Annovazzi-Lodi[4]等将机械热噪声代入陀螺两个轴的动力学方程中,同时考虑了电热噪声的影响,计算出陀螺的信噪比,并引入噪声等效角速率(Noise Equivalent Angular Rate,NER)这个参数来同时表征陀螺的噪声性能与灵敏度限制,研究发现机械热噪声可能代表传感器实际灵敏度的极限。2005年,阿拉巴马大学R. P. Leland[5]首先构建了机械热噪声在MEMS陀螺控制环路中传递过程的数学表达式,使用随机平均法得到开环和力平衡模式下“慢”变量表示的近似系统来分析机械热噪声的影响,给出了模态匹配和频率裂解下角度随机游走和噪声等效角速率的功率谱密度之间的关系,在给定结构参数下计算出的角度随机游走水平达到了战术级。
1.2.2 MEMS陀螺闪频噪声研究
闪频噪声即1/f噪声,频率越高功率谱密度越小。与白噪声不同,闪频噪声无法通过对输出数据进行平均而降低,而且由于这种噪声在低频处能量集中,信号经过积分产生的角度误差会随着时间积累,对导航精度产生很大影响。闪频噪声来源于CMOS晶体管栅氧化层与硅衬底界面处电荷载流子的随机俘获和释放,是所有晶体管的固有特性[6]。在硅微陀螺仪复杂的测控电路中,存在成百上千的晶体管,且不同晶体管的噪声转化机理也不尽相同,从众多含有晶体管电路中定位出影响硅微陀螺零偏不稳定性的主导噪声源就显得十分困难。晶体管的闪频声通常用一个与栅极串联的电压源来模拟
(4)
式中,Cox为单位面积的栅极氧化层电容,K为由工艺决定的常量,W,L分别为晶体管沟道的宽度和长度。
2001年,怀俄明大学S.C.Peacock[7]基于场效应晶体管放大器研究了1/f噪声影响增益的幅度和相位,将其转换为载波信号上的振幅调制噪声和相位调制噪声。A. Mohammadi等[8]在2012年发表的文献中指出电热噪声和闪频噪声是批量加工的MEMS陀螺中的主要噪声,并提出一种低闪频噪声的接口电路。同年,M. Kirkko-Jaakkola[9]将1/f噪声的特性与陀螺偏置校准中涉及的预测问题联系起来,利用卡尔曼预测器和移动平均预测器来预测零偏。2017年,德国博世公司T. Hiller等[10]讨论了具有力平衡和正交控制回路的陀螺噪声性能,发现零偏不稳定性在长积分时间内主导了角度误差,即1/f噪声是主要误差分量,并证明零偏不稳定性与正交误差不具有相关性。为了寻找主导零偏不稳定性的1/f来源,他们通过理论分析和测试数据得出零偏不稳定性随着驱动振幅的增大而增加,随频差增大而降低,并不是独立产生于敏感回路,并给出了几个零偏不稳定性可能的来源,包括:通过力作用于检测质量块的噪声源,通过馈通产生交叉耦合的噪声源,以及来自驱动回路锁相环(Phase-Locked Loop,PLL)的解调信号的相位抖动,如图2所示。随后又在2019年发表的论文[11]中验证之前的猜想,分析了附加于频率调谐电压上的闪频噪声会影响零偏不稳定性,并且交叉耦合到输出的传递函数,比输入角速率到输出的传递函数在驱动频率处具有更陡峭的相位梯度,进一步通过实验证明DAC施加于频率调谐电压上的1/f噪声使交叉耦合信号在驱动频率附近产生噪声边带,从而主导了零偏不稳定性。

图2 博世公司提出的闭环控制下陀螺零偏不稳定性的可能来源Fig.2 Possible sources of gyro bias instability under closed-loop control proposed by Bosch Company

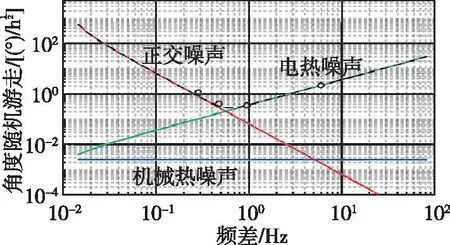
图3 加州大学欧文分校由不同噪声源估计的ARW极限Fig.3 Estimated ARW limit of the gyroscope due to different noise sources
2 MEMS陀螺噪声模型研究进展
进行噪声分析的重要手段是噪声模型的建立,将各器件或者模块的噪声传递过程连结起来可以得到整个系统的噪声模型,通过对谐振器系统噪声模型的分析,可以得出系统的噪声特性。但是为了实现高精度测量,测控系统变得复杂多样,噪声源增多,特别是在模态匹配、闭环检测形成的多闭环系统中,对各噪声源的分析较为困难,不同类型的噪声源经过谐振器会影响信号的幅度和相位。
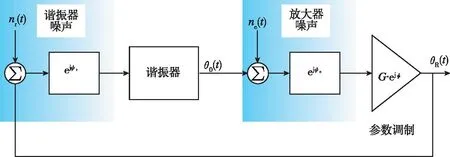
为了使不同的实际噪声源在统一的模型框架下进行传递,A.Hajimiri将对象系统分解为幅度和相位两个子系统,引入了冲击敏感函数(Impact Sensitive Function,ISF)来描述不同时刻输入的脉冲电流噪声对输出电压幅值和相位波动的影响。随后,D.Ham 与A.Hajimiri[13]一起提出以虚拟阻尼作为相位噪声的度量,把振荡器相位噪声理论和谐振器理论放在相同的框架内。南京理工大学赵健等[14]将噪声分解的方法应用于MEMS谐振器中,将加性噪声源和乘性噪声源通过谐振器分解的调制矩阵得到幅度噪声和相位噪声,分解后的噪声源通过同样被分解的幅度和相位子系统得到幅度抖动和相位抖动,并对噪声分解模型进行仿真与实验验证。2018年B.Hong与A.Hajimiri[15]发表的论文中完善了包含振幅衰减和相位转化的非线性振幅扰动和相位扰动表达式。分解后的系统相比原系统,阶数得以降低,对象足够简化,单独分析噪声对信号幅度和相位的影响,分解原理如下:

(5)
(6)
(7)
(8)
式中,τ为冲激时刻,指数衰减函数为
(9)
(10)
式中,Km为在谐振频率处谐振器的增益,u(t)表示载波信号。
式(9)和式(10)可以看作噪声响应在理想振幅矢量的切向(振幅变化方向) 和法向 (相位变化方向) 的投影,从中可以得到分解后谐振器幅度调制和相位调制子系统的传递函数。由此,可以定义一个调制矩阵M,用来将完整模型中的加性噪声和乘性噪声分解到相位调制和幅度调制子系统中,得到的相位调制及幅度调制噪声,施加在分解后的传递函数上,最终得出谐振器系统幅度和相位的噪声响应,过程如图4所示。基于以上理论,将MEMS陀螺的噪声建模划分为相位噪声模型与幅度噪声模型的构建。

(a) 谐振器复平面的噪声响应
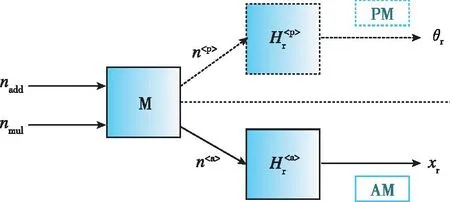
(b) 分解的谐振器噪声传递过程图4 相位与幅度噪声分解过程Fig.4 Decomposition process of phase and amplitude noise
2.1 相位噪声模型研究进展
谐振器系统中的噪声源会引起谐振器频率或相位抖动,产生相位噪声。建立相位噪声模型,分析相位噪声理论上对陀螺零偏输出的影响,在传感器设计阶段具有十分重要的意义。针对不同的谐振器类型,先后提出线性时不变(Linear Time-invariant,LTI)模型、线性时变(Linear Time-Varying,LTV)模型以及非线性相位噪声模型。
2.1.1 传统振荡器相位噪声模型发展过程
最早在1966年,D.B.Leeson[16]提出了基于线性反馈系统的线性时不变相位噪声模型,如图5所示,构建了从放大器输入噪声功率谱密度到输出相位噪声的传递过程,称为Leeson公式,其表达式为
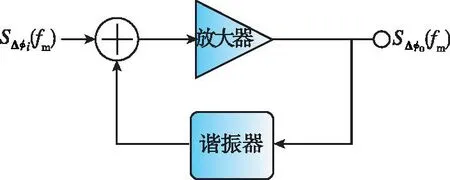
图5 Leeson相位噪声模型Fig.5 Leeson phase noise model
(11)
式中,F为放大器噪声系数,Ps为载波功率,fc为热噪声与1/f噪声转折频率,f0为谐振频率,QL为有载品质因数,是表征振荡器相位噪声指标的参数。
Leeson公式作为LTI模型的基础,不断有人对其进行引用及补充。1996年B.Razavi[17]研究了噪声源被带有振荡器的反馈系统整形后输出噪声功率谱密度的过程,重新定义了有载品质因数,并且分析了三种噪声的特性,即加性噪声、低频乘性噪声、高频乘性噪声,计算的环形振荡器相位噪声的理论仿真值和测量值误差不超过5dB/Hz。但是基于LTI假设的模型不能解释相位谱中的闪频噪声、1/f3噪声,并且未考虑噪声调幅到调相的变换过程,还包含经验参数,几乎无法对指定振荡器噪声进行准确的预测。
为了弥补线性时不变相位噪声模型的缺陷,A.Hajimiri等[19]T.H.Lee等[19]提出了振荡器的线性时变相位噪声模型,利用ISF推导了环形振荡器在给定的总功率损耗与振荡频率下抖动和相位噪声的闭环表达式。研究发现输出噪声功率谱密度由各部分噪声在振荡频率整数倍附近的相位噪声之和给出,并证明了相位谱中的闪烁频率噪声是由电路中非对称因素引起的。LTV模型预测实际相位噪声需要确定冲击敏感函数,但 ISF并没有直接与振荡器的电路物理参数相关联,限制了该模型在电路设计中的应用。2000年,A.Demir[20]对线性时变模型进行改进,将噪声扰动引入振荡器的微分方程中,采用Floquet理论得到振荡器的周期稳态解,并将相位噪声视作相位偏移对周期稳态解的调制,得到在频偏处的单边带功率谱密度。之后他又提出幂律谱噪声模型[21],使用各种符合幂律谱函数的噪声分量之和来表征振荡器信号的相位起伏谱密度。2010年,M.Q.Lee[22]根据闭环增益参数对反馈式振荡器的稳定性与相位噪声进行了研究。将 1/f噪声视为直流附近的扰动对器件参数的调制,利用 Kurokawa方法分析1/f噪声到相位噪声的变换。
2.1.2 非线性相位噪声模型发展过程
无论对于LTI模型还是LTV模型,鉴于CMOS振荡器的应用场合,幅度抖动对频率的耦合作用均作为被忽略的因素处理。对于MEMS振荡器,由于非线性刚度的存在,幅度与频率之间存在一个不可被忽略的耦合路径,因此上述模型均无法直接应用于MEMS振荡器。密歇根大学S. Lee等[23]研究发现MEMS谐振器中振幅-刚度耦合(Amplitude-Stiffness,A-S)效应会导致额外的1/f3相位噪声,产生的1/f3噪声与低于临界振幅的振幅无关。为了探究非线性刚度下低频域相位噪声产生机制,研究人员相继提出新的相位噪声模型。
2010年,新加坡国立大学贺林[24]等人提出了状态空间相位噪声模型,将 LTV 模型与 A-S 效应相结合,使用自动幅度控制回路(Automatic Amplitude Control Loop,AAC)避免轨道扰动被积分产生漂移,如图6(a)所示。将位移传感器检测到的振荡幅值与预设值进行比较,它们的差值被送入AAC环路滤波器L(s),以产生增益扰动信号,得到相位噪声的封闭解。其中,AAC引入的1/f噪声通过A-S效应产生1/f3相位噪声。2011年,美国Draper实验室建立了闭环下谐振器噪声和电路噪声以及幅度频率耦合导致的频率噪声到输出相位噪声功率谱密度的传递过程[25],并且额外分析了MEMS谐振器系统的参数调制的影响,如图6(b)所示。参数抖动由振幅噪声、电压源扰动和温度等因素导致,不仅使上述三种噪声分量出现额外的相位噪声,还导致加性噪声电压和相位之间的直接耦合使闪频噪声在相位噪声谱中产生1/f3噪声。研究还发现,电路非线性使近载波相位噪声显著增加,且由于1/f到谐振器的非线性映射,拐角频率会降低到1/10,如果再加入谐振器非线性,相位噪声会进一步增加。2013年,南京理工大学石然[26]对传统 LTI 模型进行修正并考虑A-S效应引起的额外相位噪声,如图6(c)所示。他分析了振荡器中自动增益控制(Automatic Gain Control,AGC)电路对低频范围内相位噪声(1/f3相位噪声和1/f5相位噪声)的影响,指出AGC噪声与跨阻放大器输出电压信号相乘会导致噪声频谱的搬移,产生1/f3与1/f5相位噪声,在满足带宽条件下,调整驱动振幅和Q值可以有效降低相位噪声。将实验结果与噪声模型预测对比,白相位噪声和1/f5相位噪声的测试数据比模型预测值低约10dB。与之前的模型相比,相位噪声模型与实验结果更加吻合。2014年,D.K. Agrawal等[27]在其发表的论文中更全面地分析了来自机械结构和电路模块非线性效应引起的相位噪声,研究发现靠近载波频率的相位噪声受非线性影响非常严重。另外,引入了扩散系数作为定性参数来量化振荡器中的相位噪声,扩散系数与刚度硬化系数和刚度软化系数成比例,可以通过调节电刚度减小非线性,来找到最优扩散系数,但是在噪声模型中没有考虑由非线性导致的1/f的转换。2019年,M.Bonnin等[28]研究了有色噪声对非线性振荡器中相位噪声的影响,将受有色噪声影响的非线性系统,转换为受高斯白噪声影响的等效系统,对变换系统的相位偏差和振幅偏差进行了描述,其中系统动力学仅用相位变量来描述,推导了一个简化的相位模型来分析和表征相位噪声,实现了更精准的预测。2021年,南京理工大学刘梦祥等[29]提出了包括AGC电路和频率读出电路在内的全相位噪声系统模型,如图6(d)所示。结合电路仿真软件模拟晶体管噪声加入到仿真模型进行仿真,揭示调频陀螺仪中所有不同的物理噪声源,并量化它们的权重,在高频域量化噪声占主导,在低频域结构中热噪声和AGC噪声共同影响预测的性能,测试的零偏不稳定性为1.4(°)/h,预测的零偏不稳定性为1.1(°)/h,相位噪声模型为陀螺仪系统设计和CMOS电路设计提供了定量的指导。

(a) 状态空间形式的相位噪声模型
(b) Draper实验室谐振器相位噪声闭环传递
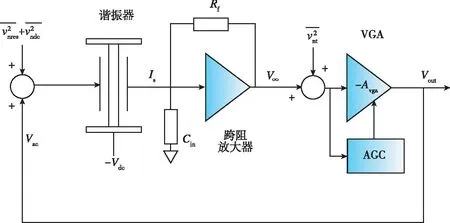
(c) 带有AGC的谐振器相位噪声传递过程
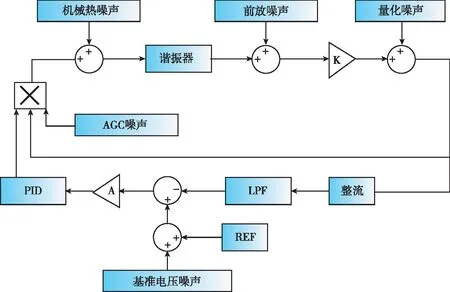
(d) FM陀螺的相位噪声模型图6 非线性相位噪声模型Fig.6 Nonlinear phase noise model
2.2 幅度噪声模型研究进展
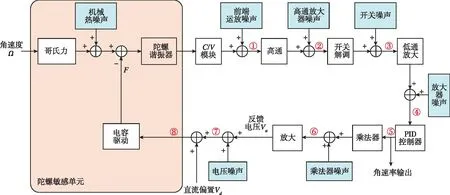
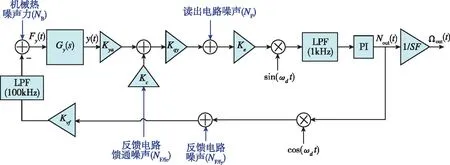
MEMS陀螺的闭环驱动具有自动幅度控制环路以确保恒幅振荡,所以驱动轴的振幅稳定性相对较好,驱动信号对解调信号的噪声贡献一般可以忽略,常用的幅度噪声模型主要是针对检测轴谐振系统建立。由于FPGA中的调制和解调模块使得电路的闪频噪声几乎不影响检测输出,陀螺仪带宽中的电路噪声可视为白噪声。在力平衡闭环检测下,推导出谐振器、测控电路各部分传递函数和角速率输出处各噪声源的频谱表达式,而计算出角度随机游走性能指标。这样的理论分析方法还能反映单个噪声源对输出噪声等效率的贡献,分析随着陀螺结构和电路参数变化的不同趋势,量化这些噪声对输出端噪声性能的影响,能够对优化实际电路提供参考。


(a) 加州大学洛杉矶分校提出的力平衡噪声模型

(b) 南京理工大学提出的开环检测噪声模型

(c) 东南大学提出的噪声模型
(d) 国防科技大学提出的嵌套环陀螺噪声模型
(e) 苏州大学提出的基于EAM检测的噪声模型图7 各种幅度噪声模型Fig.7 Various amplitude noise models


幅度噪声模型的构建过程基本是针对力平衡闭环,在环路不同位置加入实际噪声源,使模型预测效果更加贴近测试结果,如表1所示。构建噪声模型一方面可以研究陀螺结构以及电路参数,如驱动频率、驱动振幅、电路增益等对于输出噪声等效角速率的影响;一方面可以量化不同噪声源对于输出噪声等效角速率的贡献,从而指导设计,提高陀螺噪声性能。

表1 各幅度噪声模型预测效果对比Tab.1 Experimental performance index of each amplitude noise model
3 噪声模型总结及展望
综上所述,近年来随着MEMS陀螺精度的不断提高,对噪声性能的要求也逐步提升,噪声模型的构建变得愈加重要。相位噪声模型从LTI模型到考虑非线性因素的模型,已经能够很好地解释各种低频相位噪声的产生机理,并对相位噪声进行准确预测,但是这些相位噪声模型主要针对以频率为输出的谐振器,应用于指定的环路,缺少相对统一的方法探明相位噪声与陀螺性能指标的关系。对于主流的调幅陀螺,由于相位噪声对信号幅度耦合作用,以及解调过程相位噪声对解调输出的影响效果尚不清晰,目前并没有一个系统化的相位噪声模型来完整地解释相位噪声对零偏输出的影响。幅度噪声模型虽然基于谐振器系统各部分传递函数,搭建各输入噪声与输出噪声等效角速率的数学关系,从中得到角度随机游走影响因素,并能够通过仿真及实验进行验证。但是幅度噪声模型对噪声传递过程进行了简化,仅以陀螺环路中的白噪声为研究对象,缺少对零偏不稳定性噪声模型的建立。
针对这些问题,本文认为需要从以下两个方面对噪声模型进行改进。
1)通过建立相位噪声模型探究相位噪声对MEMS调幅陀螺角速率输出的影响,并建立相位噪声模型与陀螺性能之间的联系。
2)深入对MEMS陀螺零偏不稳定性来源的研究,并探究闪频噪声在陀螺系统传递过程中的机理。通过对零偏不稳定性和闪频噪声特性的研究,搭建一个完整的幅度噪声模型,以更好地理解陀螺系统中幅度噪声的产生。
建立完整的噪声模型不仅能够量化各物理噪声源对MEMS陀螺性能指标的实际贡献,还能优化陀螺结构及电路设计,使陀螺分辨率和精度得到大幅提高。