基于数据融合的MEMS阵列加速度传感器实现方法*
2023-03-22吴奇龙
吴奇龙,周 同
(南京理工大学 机械工程学院·南京·210094)
0 引 言
工程技术的不断发展以及对精密制造与精密测量技术需求的日益提高,极大地刺激着MEMS传感器及数据处理技术的发展。尽管如此,依然存在着对宽频带、大范围信号实时测量的高要求与传感器有限检测性能之间的矛盾。例如,在大型光学器件精密加工时,需要对机器人终端执行器跨越7个数量级(10-7g~1g,g表示重力加速度)的宽频(1~500Hz)振动信号进行实时检测以实现纳米级原位测量及振动补偿等关键技术环节,要求加速度传感器具备低噪声、宽频带、高动态范围等性能。然而,已有的压电式、谐振式、电容式和隧道电流式等MEMS加速度传感器均无法同时满足上述应用场景的技术需求。
近年来,芯片工艺的不断迭代升级,推动了MCU主频与算力的不断增加,通过实时数据融合技术融合多个MEMS加速度计的互补性数据以获得更可靠的数据已成为了提高对宽频带、大范围信号振动信号检测能力的新方案。MEMS加速度传感器具有抗过载、体积小、质量小、成本低和易于集成等优点,适合阵列集成。阵列传感器的性能一方面受制于各子传感器的性能与契合度,另一方面受制于数据融合算法的性能。MEMS阵列加速度传感器将用于振动信号的动态测量,因此,对数据融合算法的实时性和精度提出了较高的要求,例如,在机器人末端振动检测的应用场景中,需要数据融合算法的融合输出间隔小于1ms,且融合数据的精度不低于各个MEMS子传感器的精度。
数据融合技术,也称多传感器数据融合技术,分为数据级融合、特征级融合和决策级融合三类[1],MEMS阵列加速度传感器采用数据级融合技术。现有的数据级融合技术可以归纳为以下三类:其一是加权平均法[2]、贝叶斯估计法[3]、卡尔曼滤波法[4]和最小二乘法[5]等经典融合方法,这类方法的实时性较好,但一般需要配合最优化技术或自适应策略以获取较高的融合精度;其二是模糊控制法[6]、粗集理论法[7]、神经网络法[8-9],这类方法的稳健性较高,能够融合不同类型或差异较大的传感器数据,缺点是模型复杂、融合精度和实时性之间相互制约;其三是证据理论[10]、支持度评估等与上述方法的杂交变体,也是近年来多传感器数据融合领域的研究热点,例如加权融合与卡尔曼滤波结合[11]、信任度与遗传算法结合[12]等方法,这类方法能在数据源存在较大干扰的情况下使融合数据维持较高的可信度,但该方法依赖大量的传感器节点且实时性低。因此,上述众多已有的数据融合方法均无法满足本文MEMS阵列加速度传感器对数据融合算法的精度与实时性要求。
针对单MEMS加速度计性能有限,其采集到的信息往往无法满足实际工程中复杂且严苛的检测需求的问题,本文设计一种MEMS阵列加速度传感器的系统架构,并针对已有的数据融合技术无法满足MEMS阵列加速度传感器的精度与实时性要求的问题,提出基于离散对数映射的自整定加权融合算法。在此基础上,设计MEMS阵列加速度传感器的实现方法与仿真验证方案。
1 MEMS阵列加速度传感器系统设计
MEMS阵列加速度传感器主要由MEMS加速度传感器阵列和微控制单元(Microcontroller Unit,MCU)两部分组成,其系统架构如图1所示。其中,MEMS阵列模块由多个(本文以3个为例)具有互补范围的MEMS加速度计组成,在通道使能信号的控制下,为MCU提供指定通道(子传感器)的数据;在工作模式下,MCU将输出通道使能信号并采集两个通道的加速度数据,然后对采集到的数据进行野值修正、温度补偿等必要的预处理操作,对数尺度权重映射策略模型将根据输入数据的范围情况输出数据融合权重,最后,数据融合模型将对融合预处理后的双通道数据加权以获得输出值,同时数据通道决策控制模块将根据融合输出值产生新的通道使能信号;在标定模式下,MCU根据输入的标定参考值计算融合数据的损失值,进而在线整定对数尺度权重映射策略的模型参数。通道使能信号采用一位二进制表示,其为0时,使能加速计1和2;为1时,使能加速度传感器2和3。
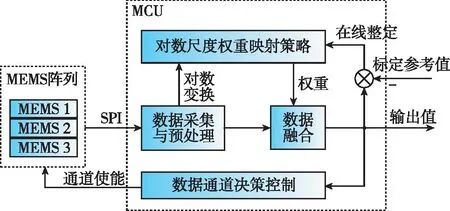
图1 MEMS阵列加速度传感器系统架构框图Fig.1 Frame of the MEMS array acceleration sensor
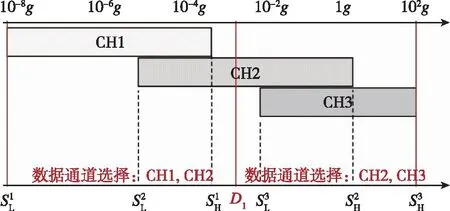
图2 MEMS阵列加速度传感器互补范围示意图Fig.2 Schematic of the complementary range of MEMS array acceleration sensor
2 基于离散对数映射的自整定加权融合算法
低延时、高精度的数据融合算法是MEMS阵列加速度传感器的关键技术需求。加权平均数据融合方法是根据经验赋予各个数据源合适的权重系数以获得更高质量的数据输出,该方法具有原理简单、实时性高的优点,因此本文将基于加权融合法对采集到的双通道数据进行实时融合,双通道数据加权融合公式如下
d=dL×ω+dH×(1-ω)
(1)
式中,dH和dL为采集的双通道数据,d为融合输出数据,ω为双通道加权融合的权重。
权重设计是加权融合法的关键环节,决定着加权融合算法的性能。近年来相关研究中的权重设计方法可以归纳为以下两类:其一是利用噪声分析、支持度分析等技术自适应生成融合权重的在线方法[13],此类方法的计算过程复杂,实时性较低;其二是粒子群优化等技术生成最优权重向量的离线方法[14],这类方法几乎不损失融合速度,缺点是依赖离线训练过程且收敛困难。为了在不损失加权融合实时性且不依赖离线优化过程的前提下提高融合精度,本文提出了基于离散对数映射的自整定加权融合算法。该算法在工作模式时将根据数据状态快速给出融合权重,在标定模式时将根据标定参考值计算融合输出的损失值进而实现权重自整定。为避免数据范围对权重自整定过程的影响,本文使用相对误差的平方δ2作为损失值,损失函数如下
(2)
算法1描述了离散对数尺度权重映射及自整定算法的具体流程。其中,N是MEMS阵列加速度传感器的工作范围在对数尺度上的等分区间个数,较大的N有利于提高融合精度,但会降低权重自整定的收敛难度和收敛效果,反之亦然;α是ω每次调整的步长,较大的α将提高权重自整定的收敛速度,但会降低收敛的精度和稳定性,反之亦然;K是权重更新的平滑步数,恰当的K将提高算法的鲁棒性,避免算法易受到噪声或异常数据的干扰而无法收敛。

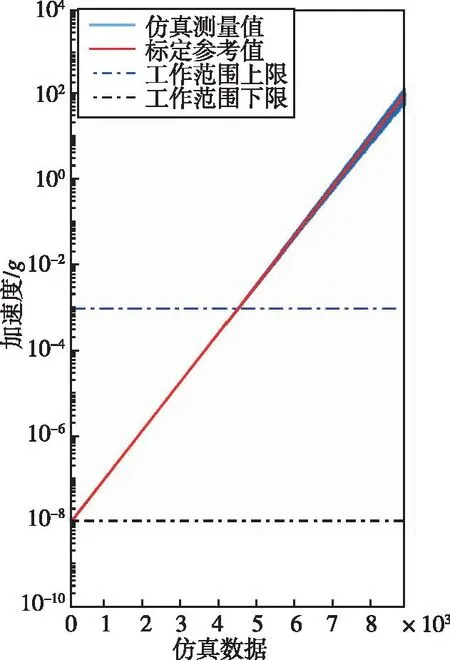
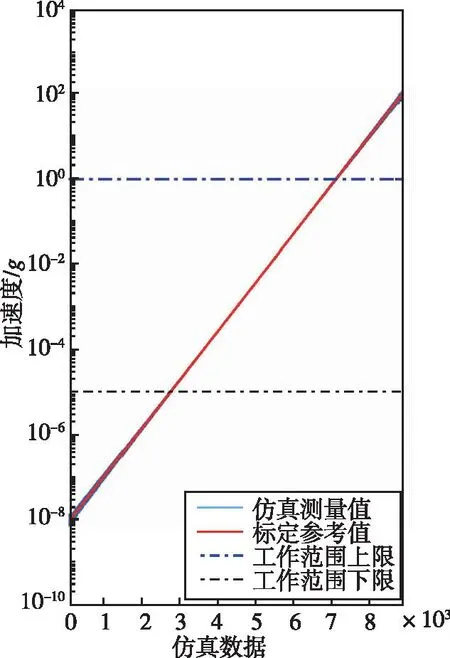
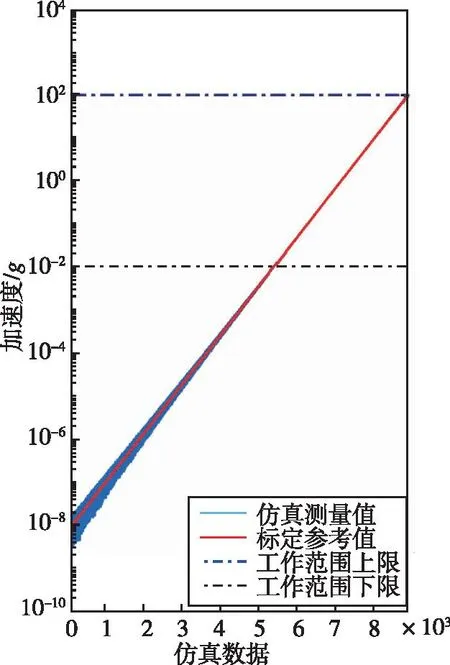
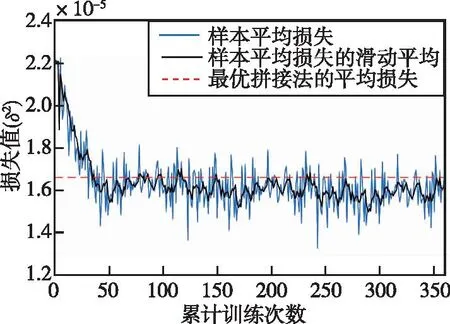
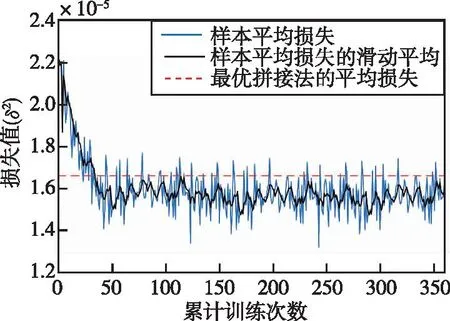
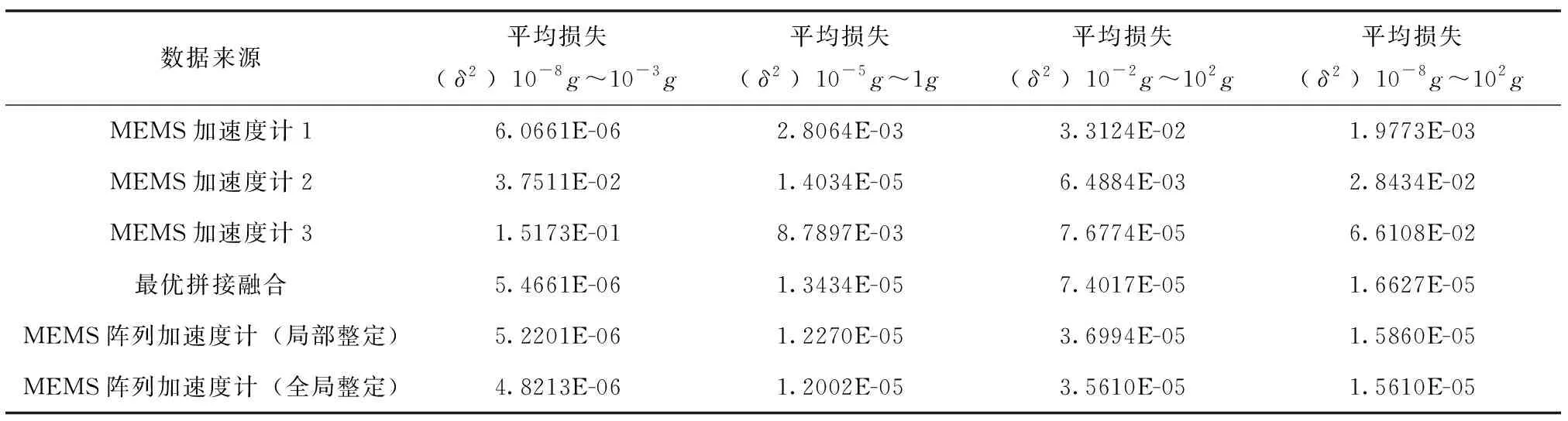
算法1:离散对数尺度权重映射及自整定流程Algorithm 1:Discrete logarithmic scale weight mapping and self-tuning process参数设置:区间个数N,调整步长α,平滑步数K初始化:融合权重Ω=(ω1,ω2,…,ωN),区间阈值Τ=(τ1,τ2,…,τN-1),经验回放池GN×K×2=∅输入:对数尺度Sc=logdL+dH2 ,标定参考值R(可选,缺省值为inf)输出:融合权重ωWhileR≠inf i=count(τi∈Τ∩τi 为了验证本文MEMS阵列加速度传感器实现方法的可行性,设计了三个不同工作范围的MEMS加速度计。假设三个MEMS加速度计的工作范围分别为10-8g~10-3g、10-5g~1g、10-2g~102g,因此集成后的MEMS阵列加速度传感器的工作范围为10-8g~102g,在该范围上按照对数尺度均匀生成6×106个标定参考值,并根据三个MEMS加速度计的工作范围为其叠加特定的随机噪声以生成仿真测量数据。生成仿真数据的具体过程可以表示为 (3) 式中,Di是第i个MEMS加速度计的仿真数据,M是标定参考数据,r是0~1上的均匀分布随机数。 生成的三个MEMS加速度计的仿真数据如图3 所示,按照对数尺度各取约9000个仿真数据进行绘制。在工作范围内仿真测量值的相对误差小于0.1,在工作范围之外,其相对误差将随着远离工作范围的程度而逐渐增大。 (a) MEMS加速度计1 (b) MEMS加速度计2 (c) MEMS加速度计3图3 三个不同工作范围的MEMS加速度计Fig.3 Three MEMS accelerometers with different operating ranges 对三个MEMS加速度计的仿真测量数据与标定参考数据进行间隔120的等间隔采样,构建出120个样本容量为5000的训练集,其中每个样本S=(d1,d2,d3,R)由同一时刻的三个MEMS加速度计仿真测量值和标定参考值组成。 为了客观地证明本文MEMS阵列加速度传感器实现方法的有效性,利用最优拼接法融合三个MEMS加速度计的数据并计算其损失值作为对比。最优拼接法即在每个样本中寻找最优的仿真测量值,因此其输出数据精度将不低于MEMS阵列加速度传感器中任意子传感器的精度。最优拼接法的输出数据损失值l的计算公式如下 (4) 仿真实验在Python环境下搭建运行,设置最大训练次数M=360,区间个数N=100,平滑步数K=2,调整步长α如式(5),其中m是当前累计训练次数。仿真实验分为局部整定和全局整定两个部分,在局部整定实验中,仅对处在交叠区内进行权重自整定,而全局整定则是对所有权重进行整定。分别在120个训练集上独立循环运行,记录每个训练集的样本平均损失,并存储最终的权重模型。 (5) 根据记录的各个训练集的样本平均损失值绘制仿真实验的权重自整定过程曲线,如图4所示,并采用宽度为5的滑动窗口计算样本平均损失的滑动平均值。从局部整定过程曲线可以看出,在训练初期样本的平均损失下降较快,经历约50次训练后,提出的基于离散对数映射的自整定加权融合方法在绝大多数样本上都能获得低于最优拼接法的平均损失。对比局部整定过程曲线与全局整定过程曲线,可以看出后者能获得更高的数据融合精度,因此本文的方法在非交叠区域依然能够有效提高数据精度。 (a) 局部整定过程 (b) 全局整定过程图4 基于离散对数映射的加权融合算法权重自整定过程Fig.4 Process of weight self-tuning of fusion algorithm based on discrete logarithm mapping 利用训练好的权重模型在6×106个样本上进行测试并计算平均损失,分别在三个MEMS加速度计工作范围以阵列集成后的工作范围上进行结果分析,分别计算四个工作范围上仿真数据、最优拼接融合、局部整定模型和全局整定模型的平均损失,实验结果见表1。从表1数据可以看出,本文提出的基于数据融合的MEMS阵列加速度传感器实现方法有效地实现了三个不同范围的MEMS加速度计的阵列集成与数据融合输出,且构建的MEMS阵列加速度传感器具有更高的性能,在6×106个样本的平均损失值相比三个子传感器最优拼接的平均损失值降低了6.1%,融合数据的精度超越了各个加速度计的原始仿真数据。 表1 仿真实验结果及对比数据表Tab.1 Table of simulation experiment results and comparative data 本文针对单MEMS加速度计性能有限无法满足实际工程中日益复杂且严苛的检测需求的问题,提出了一种基于数据融合的MEMS阵列加速度传感器实现方法,在仿真环境下,实现了阵列集成三个不同范围的MEMS加速度计以提高检测性能的目的,相比于最优拼接法的平均损失降低了6.1%,且融合数据的精度超越了各个加速度计的原始仿真数据。但本文未能完全还原真实MEMS加速度计的数据特性,后续将搭建MEMS阵列加速度计样机并进行功能验证与优化,使其应用于实际工程中的宽频振动信号检测任务。3 仿真实验与结果分析

4 结 论