参数自适应误差自校准的Sigma-Delta闭环微机械陀螺仪*
2023-03-22周景川熊瑞宏
周景川,熊瑞宏,陈 方
(1.中国科学院上海微系统与信息技术研究所 传感技术联合国家重点实验室·上海·200050;2. 中国科学院大学·北京·100049)
0 引 言
Sigma-delta调制 (ΣΔM) 技术被广泛用于高分辨率模数转换器(Analog-to-Digital Converter,ADC)。当前,随着MEMS技术的发展,基于ΣΔM技术的微机电力平衡闭环测控机制已被用于MEMS惯性传感器中,实现了高精度和大动态范围的工作性能,在MEMS加速度计[1]、MEMS陀螺仪[2-3]和MEMS洛伦兹力磁力计[4]中均得到了验证。先进的微机电ΣΔM闭环测控技术能够同时实现静电力平衡反馈控制和传感器信号的模数转换,是实现高精度单芯片、低成本片上系统集成的有效技术手段。

级联式多级噪声整形(Multi Stage Noise Shaping,MASH)ΣΔM技术也在高精度ADC中广泛使用,其由多个低阶ΣΔM调制器和数字滤波器级联组成。与高阶串联ΣΔM结构相比,MASH结构ΣΔM调制器由于都由低阶ΣΔM调制器级联组成,更稳定且能承受更大范围的输入信号[8]。英国南安普敦大学Kraft等人率先研究了MASH 2-2和MASH 2-0架构的微机电ΣΔM加速度计[9-10],整个电路包括了一个2阶的微机电闭环回路和级联的ΣΔM调制器,实现了MEMS加速度计的高精度测控。
本文创新性地提出一种参数自适应的误差在线自校准MASH-ΣΔM闭环电路设计,用于上海微系统所研发的高真空MEMS音叉陀螺中,该MEMS芯片采用的是双质量体音叉谐振结构设计,陀螺驱动模态和敏感模态相互解耦,采用先进的真空键合SOI工艺技术完成了MEMS批量制造和测试。电路系统采用双量化式MASH2-0调制器架构设计,在相同噪声整形级数下,该架构相比于传统高阶串联式电路架构能够获得整体更大的动态范围,即保证MEMS陀螺电路更高的稳定性。在软件中进行了系统建模和电路参数优化,采用最高有效位(Most Significant Bit,MSB)来实现MEMS陀螺敏感模态的闭环力反馈测控,同时用专用数据位来标记电路中的量化误差。该技术通过在量化器之前引入伪随机测试信号来跟踪并消除误差,在基于FPGA的模数混合电路平台进行算法试验,以验证电路的误差自校准能力。
1 MEMS陀螺电路设计与分析
拟设计的误差自校准MEMS陀螺系统框图如图1所示。该MEMS陀螺仪由单个驱动回路保持稳幅稳频谐振,且对MEMS陀螺的寄生模态频率具有抑制性,同时输出低相位噪声时钟基准信号;敏感检测模态采用ΣΔM数字力平衡闭环方案,该闭环电路通过ΣΔM调制的数字流信号来平衡外界角速度,确保惯性质量单元一直位于中心位置[11]。通过电路中的正交误差校正环路消除MEMS陀螺的正交误差,该正交误差的消除进一步提高了MEMS陀螺的性能[6]。整体系统如图1所示,图1(a)为陀螺仪驱动模态系统框图,电容变化量通过模拟前端电路转化为电压变化量,进入数字电路。电压信号通过锁相环和幅度控制器后负反馈回到陀螺仪驱动模态的驱动端,实现稳幅稳频控制。锁相环中的压控振荡器输出载波信号及自时钟信号,两种信号被设定为陀螺谐振频率的倍频并用于电路控制中。图1(b)中将MEMS陀螺敏感模态嵌入到ΣΔM调制器回路形成二阶微机电ΣΔM调制单元,同时二阶环路中加入自适应数字滤波器形成MASH2-0架构,在量化器之前引入的噪声被设计的自适应数字滤波器跟踪标记并最终消除。
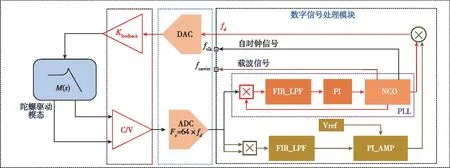
(a)MEMS陀螺驱动回路设计
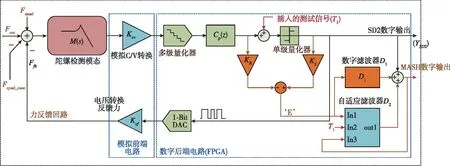
(b) 自适应自校准MASH2-0 EM-ΣΔM陀螺敏感模态闭环模型图1 误差自校准MEMS陀螺系统框图Fig.1 Self-calibrating MEMS gyroscope system diagram
MEMS陀螺中的多比特量化噪声(Q1)和单比特量化噪声(Q2)可以用增益常数(Kq1,Kq2)和噪声信号的叠加来描述;陀螺前置C/V电路可以用增益常数(Kpo,Kbst和Kfb)固定的信号放大电路来描述,其中量化噪声Q2用比例KR,KS来处理,然后经过数字滤波器(D1和D2)进行自适应校准。基于闭环系统传递函数推导MEMS陀螺的二阶ΣΔM和MASH2-0系统输出分别如下所示
YSD2=STFSD2(Fin+B)+ENTFSD2E+
Q1NTFSD2Q1+Q2NTFSD2Q2
(1)
YMASH=STFMASH2-0(Fin+B)+ENTFMASH2-0E+
Q1NTFMASH2-0Q1+Q2NTFMASH2-0Q2
(2)
其中,STF,Q1NTF,Q2NTF和ENTF分别为MEMS陀螺科里奥利信号(有效信号)、单比特量化噪声、多比特量化噪声和电学噪声传递函数。为了消除量化噪声,QNTF必须接近零。尽管MASH2-0闭环电路提供了相应的高阶噪声整形,但电路仍然对MEMS陀螺仪机械参数敏感,这导致在输出端产生额外的量化误差,从而降低MEMS陀螺仪的性能。
如图1所示,本文通过在有用信号进入量化器之前输入标定信号来实现连续自检,并使用最小均方(Least Mean Square,LMS)自适应算法来同时消除自检信号和误差信号。前提是自检信号位于有用信号带宽外,不会破坏检测到的有效陀螺信号。自适应测控算法流程如下:首先,通过计算标定信号与MASH2-0陀螺输出之间的相关性来估计误差泄漏状态;其次,在估算结果的基础上不断更新LMS系数;最后,自适应滤波器进行参数调制并将标定信号和量化误差同时消除。为了证明其有效性,进行了模型仿真验证,结果如图2所示。可见在MEMS陀螺机械参数误差变化为10%的前提下,所提出的自适应MASH2-0系统在大约4500次迭代后收敛,系统内噪声误差趋近于0。图2中对LMS滤波器迭代的效果可以看出,整个测控电路对陀螺误差进行估计,并完全消除泄露误差;电路中自适应滤波器参数逐渐收敛于最佳值,陀螺信噪比提高到118dB。
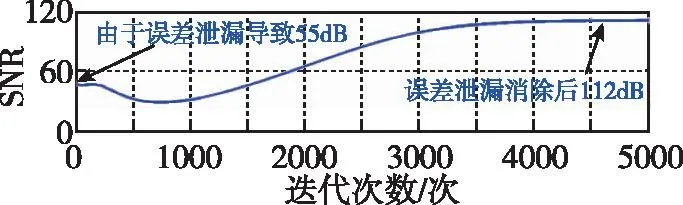
(a) MASH2-0自适应MEMS陀螺输出信噪比
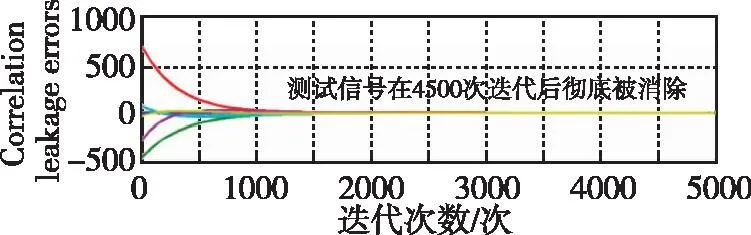
(b) 相关噪声泄漏误差
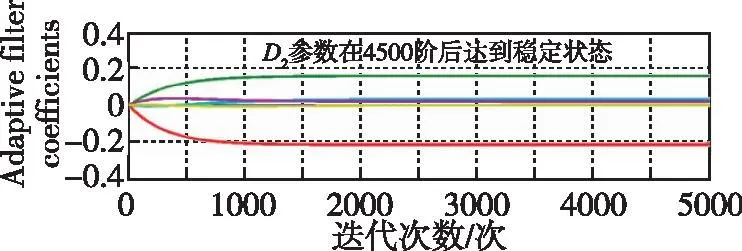
(c) 自适应滤波器参数调整图2 仿真结果Fig.2 Simulation results
图3为MEMS陀螺的ΣΔM(SD2)输出YSD2频谱密度曲线(红色)和MASH2-0输出频谱密度曲线(蓝色)。其中MEMS陀螺YSD2通过噪声整形实现了-100dB的输出本底噪声,而自适应MASH2-0通过误差自校准使得MEMS陀螺在64Hz的带宽内本底噪声降低了40dB,达到-140dB 的本底噪声水平,仿真结果初步验证了本设计的可行性。
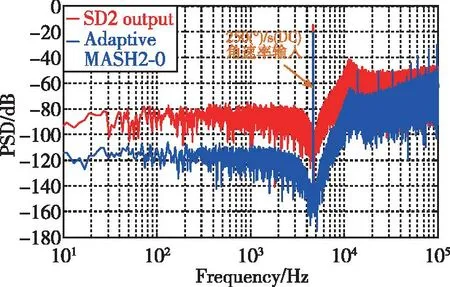
图3 MEMS陀螺SD2和自适应MASH2-0输出噪声谱Fig.3 The output noise spectrum of MEMS gyroscope SD2 output and MASH2-0 output
2 MEMS陀螺敏感结构设计与制造
MEMS陀螺敏感结构设计和完成的MEMS芯片扫描电子显微镜(Scanning Electron Micros-cope,SEM)照片分别如图4所示。其中MEMS陀螺结构为双质量体音叉式谐振结构,驱动谐振方向和敏感检测方向分别为水平X轴和Y轴,角速度输入方向为垂直Z轴,并在有限元仿真软件中完成了MEMS陀螺的有限元建模与结构的谐振模态仿真;其次,MEMS芯片采用了上海微系统所先进的60μm SOI工艺和高真空硅-硅键合工艺进行了流片制造;最后,通过引线键合将MEMS陀螺芯片封装到LCC管壳内,并进一步进行了真空排气操作,确保MEMS陀螺的高真空度。
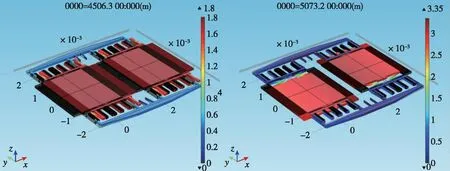
(a)陀螺模态仿真结果

(b)MEMS陀螺结构示意图和SEM照片图4 陀螺模态仿真结果,MEMS陀螺结构示意图及SEM照片Fig.4 Modal analysis of gyroscope,schematic diagram and SEM image of MEMS gyroscope
3 试验与结果
设计的MEMS陀螺原理样机如图5所示,主要包括高真空MEMS陀螺敏感表头、前置C/V电路、ADC量化电路、FPGA数字电路和DAC反馈加载电路,其中数字电路由XILINX公司的XC7A100T芯片构成,其他则采用标准分立式电子器件搭建而成。环路SD2中前置C/V电路首先进行陀螺敏感模态信号电容/电压转换,在经过ADC采样之后再由ΣΔM量化器进行量化(量化频率625kHz),量化信号经过ΣΔM调制再由DAC控制反馈电压加载到反馈电极上形成闭环;而误差自校准环路是自适应数字滤波器回路,包括自适应滤波器和数字滤波器,以数字形式在FPGA中实现。陀螺整机尺寸6cm×3cm,使用+5V的单电源供电。
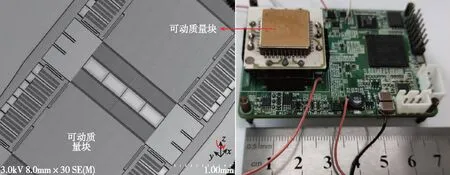
图5 制造的双质量音叉陀螺SEM图和自校准MASH2-0陀螺仪原型样机照片Fig.5 SEM picture of a manufactured dual-mass tuning fork gyroscope and self-calibrating MASH2-0 gyroscope prototype photo
首先将MEMS陀螺原理样机固定在双轴转台上,在250(°)/s角速率输入下,MEMS陀螺电路输出数字信号的功率谱密度如图6所示。从中均可以看到明显的高阶ΣΔM噪声整形特征,与理论设计一致。将MEMS陀螺分别配置为自校准MASH2-0闭环和单环4阶SD4、单环2阶SD2闭环控制,陀螺敏感模态闭环输出的1bit数字信号频谱结果分别进行比较,SD4(绿色)和SD2(红色)输出的底噪大约为-100dB和-90dB,而本文提出的自校准MASH2-0(蓝色)底噪达到了-130dB,使该MEMS陀螺的信噪比提升了30dB,且与仿真结果十分相近。
在以往的ΣΔM陀螺电路中,有效信号提取往往受到MEMS敏感结构寄生谐振模态的影响,而本文提出的自适应自校准MASH2-0闭环测控回路不仅可以有效地实现陀螺信号带宽内的噪声整形,而且将寄生模态和陀螺敏感工作模态进行了一个高效的区分,将寄生模态完全滤除。根据测试输出的功率谱图(图6)所示,MEMS陀螺的输出谐波失真已经完全消除,可以证明采用此方法之后谐波失真将不再是影响ΣΔM陀螺精度的因素。
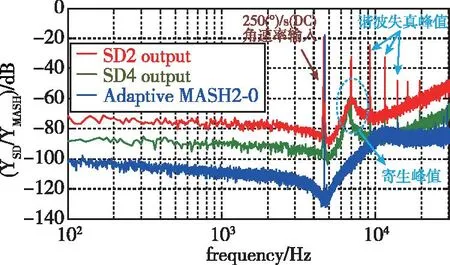
图6 MEMS陀螺敏感模态自校准MASH2-0,SD4和SD2闭环控制下输出频谱图Fig.6 Output spectrogram of MEMS gyroscope sense mode under self-calibrating MASH2-0,SD4 and SD2 closed-loop control
与以往模拟PID闭环控制来增大MEMS陀螺动态范围不同,微机电ΣΔM闭环测控机制灵活,并且可以消除MEMS陀螺敏感结构间的自吸附现象。对同一个MEMS陀螺敏感芯片,分别使用自校准MASH2-0闭环和单环4阶SD4闭环控制下的动态范围测试结果如图7所示,其中本文提出的自校准MASH2-0闭环控制最大动态范围可达112dB,而SD4闭环系统最大仅为90dB。采集的零漂数据Allan方差曲线也如图7所示,MEMS陀螺零偏不稳定性从1(°)/h降低到了0.4(°)/h,进一步验证了该技术的有效性。
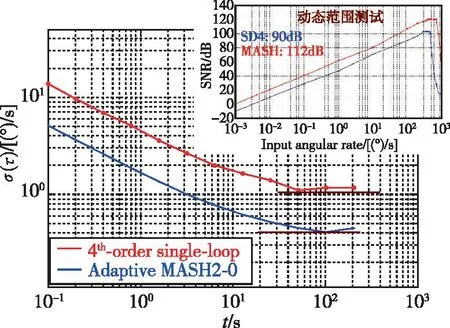
图7 SD4和MASH2-0艾伦方差曲线Fig.7 Allen variance curve of SD4 and MASH2-0 system
4 结 论
介绍并实现了一种MEMS陀螺片上误差自校准微机电ΣΔM闭环测控技术,通过内置连续标定信号和自适应算法来实现陀螺误差自校准,并建立其相应的仿真模型进行仿真验证,最后在FPGA硬件平台中验证该技术的有效性,对该MEMS陀螺主要指标进行了测试。测试结果证明,在经过误差自校准之后MEMS陀螺底噪降低了30dB,与仿真结果十分接近;同时,MEMS陀螺的零偏不稳定性由1(°)/h降低到了0.4(°)/h,同时其动态范围扩大。