机器人与LoRa 的普铁接触网状态监测系统设计*
2023-03-15于惠钧肖宇韬江志辉
于惠钧,肖宇韬,江志辉
(1.湖南工业大学 电气与信息工程学院,湖南 株洲 412007;2.湖南工业大学 轨道交通工程学院,湖南 株洲 412007)
0 引言
铁路建设事业深受国家社会的支持、重视,《“十四五”铁路科技创新规划》中指出国家要大力推进5G、人工智能、物联网等前沿技术与铁路各领域的深度融合,提升铁路智能化水平[1]。目前我国拥有世界上规模最大的电气化普速铁路网,由于其采用带回流线直接供电方式[2],因此检修作业时接触网与回流线都需要挂接地线,使得检修工作愈发繁重[3],在作业中进行接地状态监测是对作业员人身安全的重要保障。
目前智能机器人技术已经开始应用在电网中,对变电站的变电设备进行带电检修,这种机器人集数据采集、传输、分析和预警决策于一体,取代传统人工检修方式,有效提升电网运行质量[4]。铁路接触网同为高压电环境,且很多时候检修作业会面临对向仍有列车通行的情况即接触网V 型(V 停)天窗作业[5],利用智能机器人代替人工去完成该操作可以降低安全风险[6]。同时物联网及通信技术的发展对于实时监测接触网接地状态信息有很大的帮助,利用ZigBee 技术的接触网接地状态监测装置,拟解决通信盲区问题即无移动网络覆盖时的通信[7],但该技术是一种应用于短距离和低速率下的无线通信技术,在V 型天窗作业时,现场会产生很强的感应电压[8],存在一定的电磁干扰,ZigBee 设备在干扰下的效果会有所减弱。
针对上述问题设计一种机器人与远距离无线电(Long Range Radio,LoRa)的普铁接触网状态监测系统,在该系统中,利用人工智能机器人作为数据采集装置在铁路上代替传统人工完成验电与接地操作,不仅可以降低发生人身安全事故的风险,亦可实时采集验电与接地状态信息;利用物联网技术中应用广泛的LoRa 通信技术来解决铁路这类非完美环境对于通信的干扰问题[9],并及时将信息传递至云端服务器,最后通过PC 端显示机器人采集的状态信息,完成检修作业时对普铁接触网状态监测。
1 系统总体设计方案
系统主要由充当数据采集装置的接触网验电接地机器人、LoRa 自组网、云端服务器平台组成。在作业现场即铁路上用来代替人工作业的接触网验电接地机器人作为一个数据采集装置,该智能机器人具有验电、挂接地线、挂接回流线以及采集这几项状态数据的功能,通过内置的LoRa 节点模块将信息传递至作业现场外装载在作业车上的LoRa 网关;采用现有的物联网通信技术,利用LoRa 网关将信息通过4G/5G 网络传递至云服务器,云服务器可以将信息整理、分析,经过处理后的信息可在调度中心的PC 端用直观方式呈现,实现接地状态信息的可视化。该监测系统总体结构设计如图1所示。
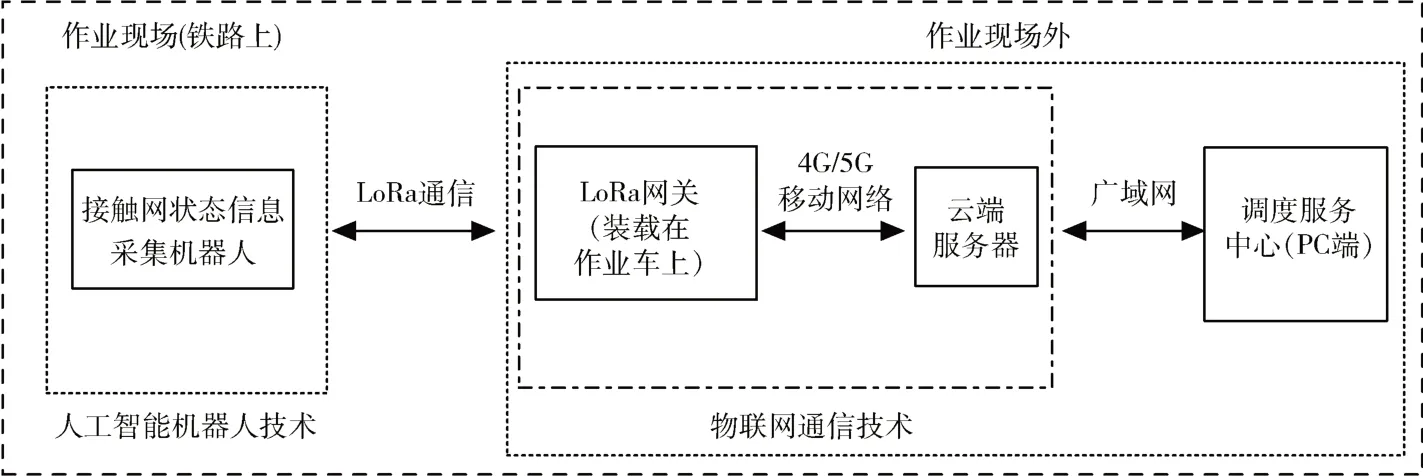
图1 普铁接触网接地状态监测系统整体结构设计
2 硬件设计
系统的硬件主要分为机器人的验电接地状态采集模块硬件以及LoRa 自组网的硬件设计。接地状态采集机器人主要实现采集并发送验电与挂接地线的状态数据,LoRa 自组网主要实现状态数据的接收与上传至云端服务器。
2.1 状态采集模块硬件设计
接触网验电接地状态采集机器人的主体为电动伸缩杆,头部的带抓手电动杆将完成对接触网的先验电再接地的操作,侧边的带回流线接地夹直杆将完成回流线的接地操作,其整体外观模型设计如图2 所示。

图2 接触网验电接地机器人整体外观模型
该机器人最核心的部件就是验电接地状态采集模块,主要由MCU 微处理器单元、验电器单元、接地断路器单元、回流线接地控制器单元、LoRa 通信节点单元、电源单元组成,验电接地状态采集模块结构图如图3 所示。
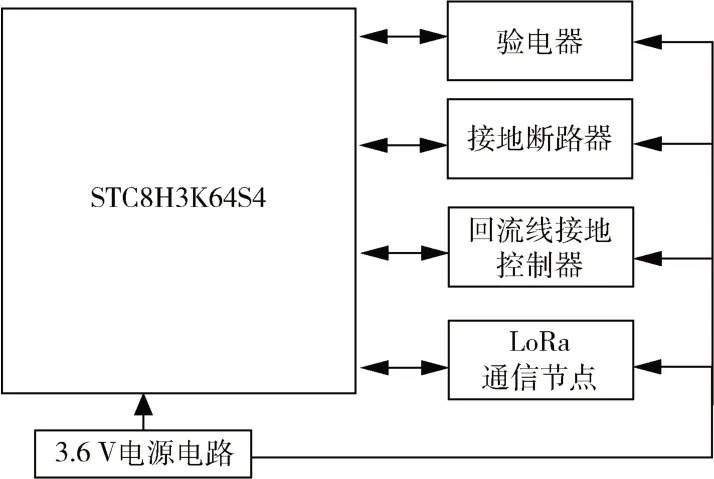
图3 验电接地状态采集模块结构图
2.2 LoRa 自组网的硬件设计
LoRa 技术是一种扩频调制技术,也称为Chirp 调制[10]。扩频技术是一种用带宽换取灵敏度的技术,Wi-Fi、ZigBee 等都使用了扩频技术。根据香农定理:
其中,Cx为信道容量,单位为b/s;Bx为信道带宽,单位为Hz;Sx为信号功率,单位为W;n0为噪声功率谱密度,单位为W/Hz;Nx为噪声功率,单位为W。
相比于Wi-Fi、ZigBee 等,LoRa 调制的特点就是接近香农定理的极限,最大效率地提高灵敏度。LoRa 是一种成本花费较低的无线通信技术,特点是传输距离远、功耗损耗低、连接节点多、抗干扰性强,同时LoRa 传输的特点是低速率、小数据。因此,利用LoRa 节点来传输接触网接地状态监测机器人的相关数据信息在理论上是适应铁路作业环境的。本系统采用的LoRa 模块是Ebyte 生产的E22-400 型,将该模块放置于机器人内部,用来与传感器连接,可以将传感器采集的各种状态信息发送出去,并由MCU 控制。其电路图如图4 所示。
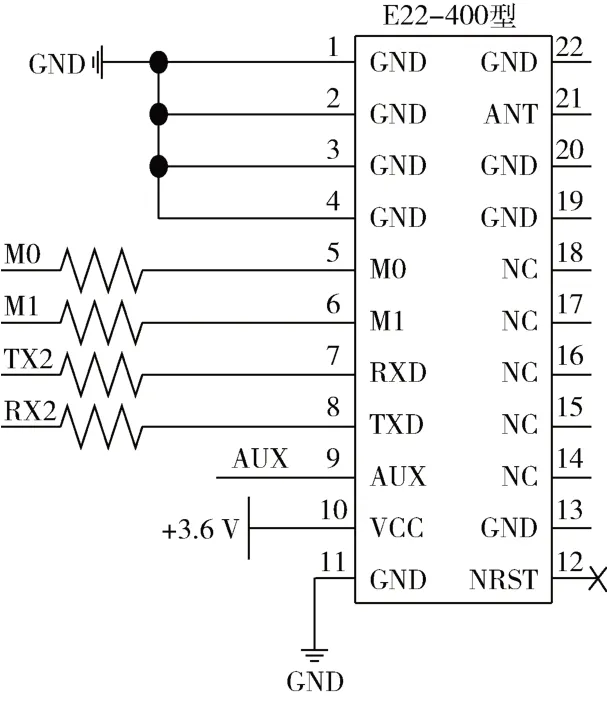
图4 LoRa 模块电路图
为了与LoRa 模块完美适配,同样采用Ebyte 生产的GATEWAY E90-DTU 型LoRa 网关,只需通过配置软件的进行射频设置就可以将多个LoRa 模块与LoRa 网关连接起来,构成一套LoRa 自组网络。当LoRa 模块与LoRa 网关配置完成并且成功连接后,LoRa 模块就可以将从传感器接收到的信息数据发送到LoRa 网关;利用网关内置的4G 或5G 移动网络模块将信息数据上传至云端服务器。
云服务器可以帮助使用者更加便捷地处理与存储数据信息,只需要有网络就可以随时随地连接云端服务器[11]。尤其是在铁路进行大小检修作业时,铁路调度中心的工作人员只需用一台PC 端就可以连接云端服务器,对作业现场的接触网验电接地状态采集机器人传输的信息可以实时查看,一旦发现状态异常可以马上联系现场作业工人并且可以及时进行应急方案的启动。
LoRa 通信的一种应用模型已经广泛应用于其他各种工业场景中,随着物联网技术的持续提升,应用范围在未来会不断扩展。该模型如图5 所示。

图5 LoRa 通信应用模型图
3 软件设计
系统的软件主要分为机器人的验电接地状态采集模块控制程序以及LoRa 自组网部分的软件设计。验电接地状态采集机器人的控制程序主要控制机器人进行验电、挂接地线与回流线等操作,并向网关发送数据指令;LoRa 自组网连接云端服务器需要编写建立一个TCP 服务端[12],同时还需要编写监测程序来实现数据的基本可视化。
3.1 状态采集机器人控制程序设计
状态采集机器人的控制程序将存储到MCU 微处理器中,由C 语言编写。机器人先验电自检,该步骤主要是为了验证该机器人的验电器工作性能是否良好,是否能够检测到自身产生的高压信号;验电自检正常后主伸缩杆开始向上伸展,自检如果不正常将直接报警,提示作业人员进行干预;检测有到位信号就会停止伸展,否则将继续伸展直到检测有到位信号。随后头部的带抓手电动杆旋转90°后垂直向上触碰接触网进行验电操作,检测到无高压信号,确认该段接触网已经停电,否则主伸缩杆将向下缩回并报警提示作业人员,起到安全防护作用;确定停电后,闭合断路器同时接地线导通,随即开启验电与接地状态监测。验电与接地操作完成后,侧边带回流线接地夹的直杆旋转90°后触碰回流线,开始进行回流线接地操作,同样检测有无到位信号,到位后将开启回流线接地状态监测。待收到作业完成指令后,将关闭所有监测,然后先缩回侧杆再收回带抓手电动杆,断开断路器和接地线,最后缩回主伸缩杆,完成所有操作。其程序流程如图6 所示。
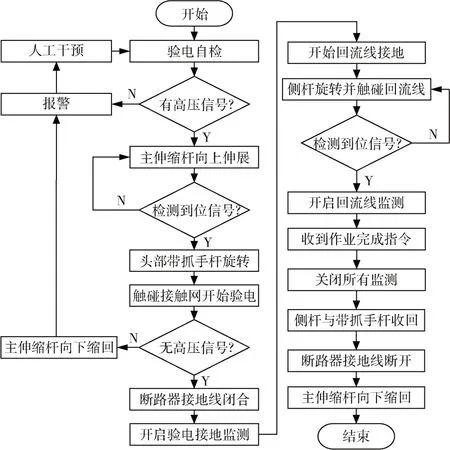
图6 状态采集机器人控制程序流程图
3.2 TCP 服务端及监测程序设计
C#语言综合了Visual Basic 和C++简单的可视化操作以及高运行效率[13],同时考虑到网关与云服务器之间采用TCP/IP 传输协议连接,而且需要一个界面式的服务端方便查看数据接收情况,因此利用C#语言编写一个TCP 服务端程序[14];考虑到Python 语言易于扩展[15],因此利用Python 语言编写设备状态监测程序。在云服务器上开启编写好的TCP 服务端程序以及设备状态监测程序,其程序流程如图7 所示。
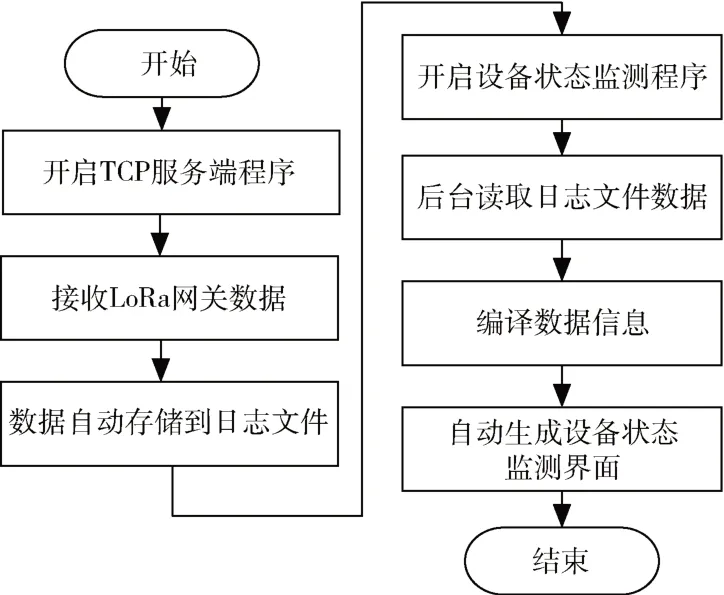
图7 TCP 服务端及监测程序流程图
4 状态监测系统模拟测试
4.1 状态采集模块与LoRa 网关通信测试
首先进行状态采集模块与LoRa 网关通信测试,实际应用中,不论是在城市中还是在铁路作业现场,很多因素都能产生一定的干扰;利用高压发生器可以模拟产生高压信号,状态采集模块的验电器单元将开始作业,状态信息将通过LoRa 模块发送至网关,状态采集模块的验电器单元实物如图8 所示。
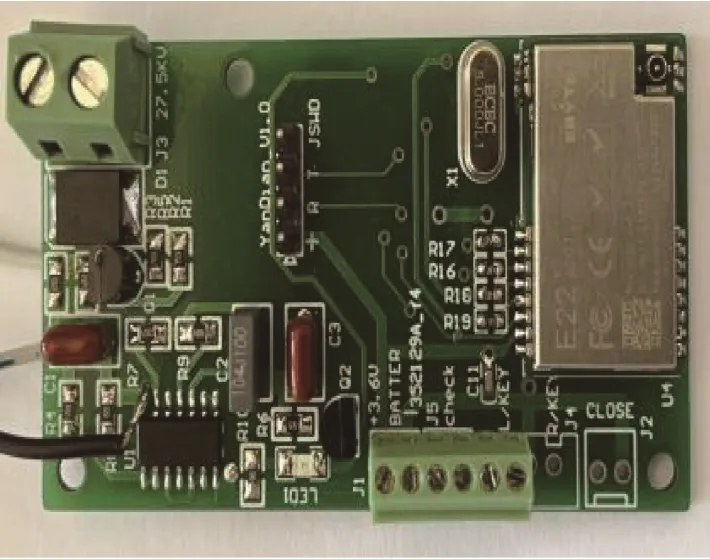
图8 状态采集模块的验电器单元实物图
利用在不同环境下的几段距离来测试LoRa 通信的信号强弱。考虑到在实际作业中,放置于检修人员乘坐车辆上的LoRa 网关离作业现场的距离不超过3 km(通常情况,距离会在1 km 范围内),因此测试3 km 范围内几种场景下状态采集模块与LoRa 网关在几段距离的信号强弱。在各场景内进行一定次数的收发信息测试,信号越强,信息收发速度越快,综合测试结果,分析得出采用LoRa 通信的状态采集模块可以达到设计预期效果,信号强弱测试结果分析如表1 所示。
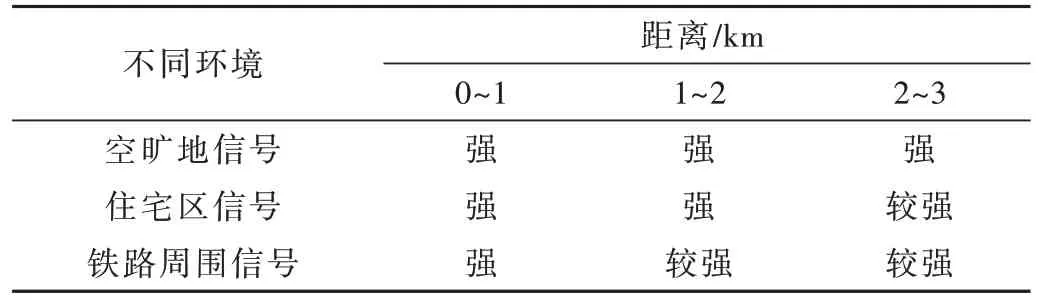
表1 信号强弱测试结果分析
4.2 LoRa 网关与云服务器数据传输测试
可以自主搭建一个云服务器,也可以在任意云平台上注册申请一个。然后测试LoRa 网关与云服务器之间的数据传输效果。例如在调度中心的PC 端登录云服务器,在界面打开LoRa 网络通信调试软件,建立一个TCP Server,与在网关中配置一样,配置好相应的地址与端口;在所有步骤无误后,可以在LoRa 网络通信调试软件中查看到连接已建立的提示,即表示网关连接云服务器成功。连接成功后即可接收来自LoRa 网关的Modbus数据指令。程序界面如图9 所示。
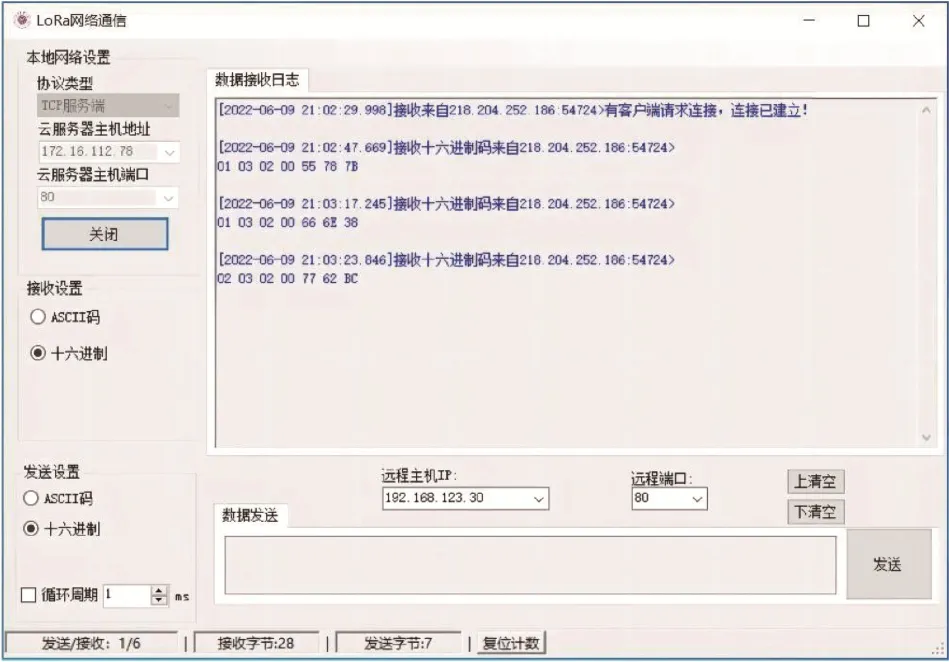
图9 TCP 服务端界面图
同时PC 端在接收到验电与接地状态信息的相关指令后,将自动将指令储存到本地日志中,由Python 编写的设备状态监测程序将在后台自动读取日志中的Modbus 数据指令,当接收到的指令表示验电器正常、接触网接地正常、回流线接地正常,可以在PC 端的设备信号监测窗口看到表示正常的三盏绿灯亮起,如图10(a)所示;当运行过程中突然接收到的表示验电器异常的指令,设备信号监测窗口的验电器将亮起表示异常的红灯,如图10(b)所示。

图10 状态监测界面图
5 结论
将人工智能机器人技术与物联网技术应用于铁路的接触网检修作业中构建一个状态监测系统,这既符合国家对于铁路科技创新规划中提升铁路智能化水平的要求,同时该接触网状态监测系统利用智能机器人代替人工进行验电与挂接地线的操作也能够提升作业时的安全性;相比传统的信息传输手段,利用物联网中的主流通信技术,不仅能够有效提升抗干扰性,并且一定程度上可以解决移动网络无法覆盖时信息的有效传输问题。
