PPK辅助无人机摄影测量在公路勘测中的应用
2023-02-19李玉斌张卫庭
李玉斌 高 强 张卫庭
(中铁工程设计咨询集团有限公司济南设计院,济南 250022)
1 概述
近年来,随着无人机软硬件设备的不断成熟与摄影测量理论的日益完善,无人机摄影测量技术蓬勃发展。凭借成本低、灵活性强、工作效率高等优势,无人机摄影测量技术成为现阶段高效采集空间地理信息数据的有效手段,在三维实景建模、大比例地形图制作等方面得到广泛应用[1-3]。
在高速公路项目设计阶段,对互通、隧道、特大桥等重要工点,应根据设计需要进行大比例地形图测绘。若采用传统的无人机摄影测量技术,必须布设大量地面控制点,作业效率低,人工劳动强度大[4]。GNSS(全球导航卫星系统,Global Navigation Satellite System)辅助无人机摄影测量技术的出现,在保证测绘成果精度的同时,能大幅降低对地面控制点的依赖[5]。基于RTK技术(实时动态定位技术,Real Time Kinematic)无人机可以在航拍的过程中实时定位,获取高精度的无人机位置信息,但其工作过程需要保持基站与无人机之间的连续数据通讯,在无网络覆盖的地区或易造成信号中断的山区,其适用性受到一定限制。而PPK技术(事后动态定位技术,Post-Processed Kinematic)不受数据通讯的限制,可以通过事后差分解算的方式为无人机提供厘米级的影像位置信息[6],即POS数据,若将其作为附加观测值参与区域网平差,能够减少所需地面控制点的数量,提高成果精度与工作效率[7]。
已有学者开展相关研究,袁修孝等在宜城测区进行的测绘航空摄影试验表明,PPK技术辅助空中三角测量可以应用于低空航测大比例地形测图[8];王刚等通过多个输电线路工程航空摄影应用实例对比研究,发现使用地面基站、CORS站的PPK技术及精密单点定位技术辅助航空摄影测量的成果精度无明显差异[9];张绪棋等以贵州修文县的航测项目为例,对PPK辅助无人机摄影测量的成果精度进行分析,研究结果表明PPK辅助无人机测图在使用较少的像控点时能够满足大比例地形图的要求[10]。综上所述,可认为PPK技术辅助无人机摄影测量生成大比例地形图具有一定可行性。
以下从无人机影像数据处理策略入手,重点研究无人机POS数据事后解算方法,并提出利用PPK技术辅助无人机摄影测量的技术流程,结合新疆某高速公路工程勘测实例,进一步分析该技术在公路勘测设计阶段山区大比例尺地形图测绘中的精度与可行性。
2 PPK辅助无人机摄影测量关键技术
利用PPK技术进行辅助无人机摄影测量时,搭载GNSS接收机的无人机按照规划好的航线执行航拍任务,另外,在地面已知点架设基站,与无人机同步采集静态数据。通过事后差分解算可以得到定位历元机载GNSS天线相位中心的精确位置信息[11]。一方面,考虑无人机定位与拍照独立进行,且无人机处于高速运动状态,机载GNSS接收机的定位历元与机载相机的拍照时刻不严格同步,存在时间偏移;另一方面,由于机载GNSS天线相位中心与机载相机的摄影中心不完全重合,两者之间存在空间偏移[12]。因此,PPK辅助无人机摄影测量的关键是,将事后差分解算得到的机载GNSS天线相位中心定位历元的位置信息转换为机载相机摄影中心拍照时刻的三维坐标。
2.1 PPK解算
对于地面基站与无人机同步采集的卫星观测数据,通过事后差分定位技术对其载波相位观测量进行联合处理,建立载波相位观测值双差观测模型,结合地面基站已知坐标,经过严密计算可以得到机载GNSS接收机天线相位中心的精确空间位置信息。
事后差分解算可以在天宝TBC数据处理软件中进行。在TBC软件中新建工程后,导入基站和无人机的卫星观测数据,输入基站在WGS-84坐标系下的大地坐标[13],关闭无人机卫星观测数据的强制连续属性,然后进行基线解算,利用轨迹文件导出器能够导出机载GNSS接收机天线相位中心的精确空间位置信息。
2.2 时空转换
(1)滑动式拉格朗日多项式插值
相关研究表明,对于无人机摄影测量过程中出现的时间偏移问题,可以采用机载GNSS定位历元的三维坐标内插得到相机曝光时刻的三维坐标[14]。拉格朗日多项式是经典的插值方法,假设y=f(xi)在区间[a,b]上是一个实函数,xi是区间[a,b]上的n个互异实数,且函数y=f(xi)在区间[a,b]上n+1阶可导,那么在区间[a,b]上任意一点x的n阶拉格朗日插值多项式的代数表达式为[15]
(1)
式中,yi为插值节点xi对应的函数值;li(x)为n次多项式,称为拉格朗日基函数,可写为
(2)
拉格朗日基函数li(x)仅由插值节点xi确定,与被插函数f(x)无关。
为了避免插值阶数过大导致插值结果发散,采用滑动式拉格朗日多项式插值算法。在保持插值区间大小不变的前提下,通过不断改变插值区间的位置使待插值点始终保持在插值区间的中央,以此来提高拉格朗日多项式插值的精度[16]。滑动式插值算法原理见图1。

图1 滑动式插值算法原理
在具体实现时,以机载相机曝光时刻为待插值点,以机载GNSS接收机定位历元及其对应的坐标分量为插值节点,分别执行滑动式拉格朗日插值算法,得到机载相机曝光时刻机载GNSS接收机相位中心的三维坐标。
(2)空间偏移改正
无人机机载GNSS接收机天线相位中心与机载相机摄影中心在空间上不重合,以机载相机摄影中心为原点,北方向为X轴,东方向为Y轴,建立空间直角坐标,两者之间的相对位置关系见图2。

图2 机载GNSS天线相位中心与相机摄影中心相对位置关系
对于无人机存在的空间偏移问题,在机载GNSS天线相位中心三维坐标的基础上,改正3个方向的空间偏移分量,就可以得到机载相机摄影中心的三维坐标,有
(3)
针对PPK辅助无人机摄影测量数据后处理时面临的时间偏移和空间偏移问题,基于MATLAB语言开发无人机POS数据后处理程序,实现了滑动式拉格朗日多项式插值和空间偏移改正,并结合PPK解算的成果,能够生成并输出高精度的POS数据。
3 工程实例
为验证PPK辅助无人机摄影测量技术在公路勘测设计阶段大比例地形图测绘中的精度,基于新疆某高速公路工程,有针对性地进行方案设计,并对成果精度进行定量分析。
3.1 工程概况
某高速公路工程位于天山北侧山区,行政区划属新疆博尔塔拉蒙古自治州和伊犁哈萨克自治州,路线起于精河县沙山子,经龙口、阿恰勒河谷、阿卡尔水电站、尼勒克会岸,到达苏古尔互通,穿天山后,经蒙马拉林场,终于苏布台。线路全长约92 km,共设有桥梁88座、隧道5座,桥梁和隧道长度达43 km,桥隧比达47%。全线按双向四车道一级公路标准建设,设计速度100 km/h。该高速公路的建设将构筑起伊犁河谷与乌鲁木齐等地最为便捷的州际通道,对于完善新疆干线公路网,改善区域交通状况,提高公路运输能力,实现新疆整体交通的跨越式发展具有极其重要的意义。
针对苏古尔互通设计的需要,需要测绘苏古尔地区1.75 km2的大比例地形图。测区地势起伏较大,南北高中间低,最大高差约80 m,道路、河流分布其中,部分区域难以到达。若采用传统的全野外测量方式,需投入4名测量人员及3套GNSS接收机、1套全站仪等设备,共需耗时3 d,且测量人员劳动强度大,作业效率低。考虑测区无网络覆盖,无法基于常规千寻位置RTK服务开展无人机摄影测量作业。因此,开展PPK辅助无人机摄影测量作业势在必行。
3.2 技术流程
利用PPK技术辅助无人机摄影测量的技术流程见图3。
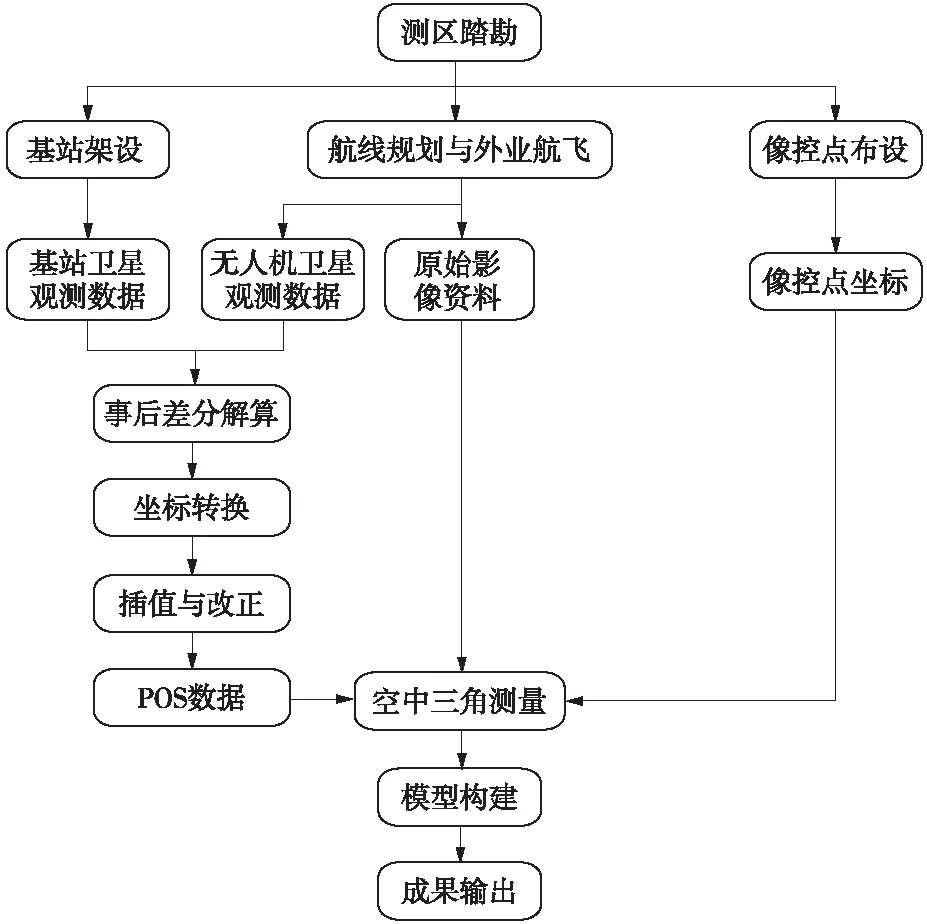
图3 PPK辅助无人机摄影测量技术流程
3.3 数据采集
采用带卫星定位模块的大疆PHANTOM 4 RTK多旋翼无人机进行低空摄影测量作业。航飞前,在地面已知点架设基站,以5Hz采样频率进行静态观测。利用基于自架基站的RTK技术准确采集在测区四周和中间均匀布设的6个地面平高控制点和24个检核点坐标,坐标系统为基于1980年西安坐标系的测区工程独立坐标系,高程采用1985年国家高程基准。测区范围及像控点分布情况见图4。根据测区范围KML文件规划航线,设置航向重叠率80%,旁向重叠率70%,飞行相对高度120 m,地面分辨率为3.3 cm。共飞行3个架次,每架次飞行时间为20 min左右,共获取906张影像,同步记录卫星原始观测值和相机曝光文件等数据。

图4 测区及像控点分布
3.4 数据处理
在无人机数据内业处理环节,采用以下两种技术方案进行处理(见表1)。两种技术方案均采用事后差分解算的方式解算无人机影像位置信息,在地面均匀布设24个检核点,其中方案1无像控点参与平差,方案二采用6个像控点参与平差。

表1 无人机数据处理方案
事后差分解算采用天宝TBC软件,生成定位历元WGS84坐标系的机载GNSS接收机天线相位中心坐标。在坐标转换软件中,设置相关坐标系参数,通过项目七参数进行坐标转换,得到定位历元工程独立坐标系的机载GNSS接收机天线相位中心坐标。
为消除时间与空间不一致造成的无人机影像位置偏差,利用基于MATLAB语言开发的程序,实现滑动式拉格朗日多项式插值与空间偏移改正,结合无人机记录的Timestamp.MRK相机曝光文件,生成曝光时刻工程独立坐标系的相机摄影中心精确三维坐标,并导出适用于摄影测量数据处理软件的POS数据文件。
在主流的摄影测量数据处理软件中,导入无人机影像和POS数据,根据需要设置相关参数,其中方案1为直接自动处理,方案2导入像控点坐标并刺点后再自动处理,生成具有空间地理信息属性的实景三维模型、数字正射影像图和数字地表模型等成果。
测区实景三维模型成果见图5。实景三维模型效果逼真、要素齐全,将测区情况真实还原。不仅可以进一步生成测绘成果,还可用于现场调查分析、规划方案对比等方面,为决策与方案设计提供科学有效的帮助,提高规划设计的科学性与工作效率[17]。

图5 测区实景三维模型示例
基于实景三维模型,结合三维测图软件,通过裸眼立体采集的方式绘制数字线划图,数字线划图见图6。数字线画图通过点、线、面及特定图形符号形式准确全面描述地形要素。

图6 测区数字线划图示例
以野外实测的检查点坐标为真值,以数字线划图中提取的检查点坐标为量测值,通过中误差来分析新疆苏古尔测区PPK辅助无人机摄影测量生成的地形图成果精度。中误差计算公式可以表示为[18]
(4)
式中,m为检查点中误差;Δ为检查点坐标不符值;n为参与评定精度的检查点个数。
根据X方向和Y方向的中误差可以计算得到平面中误差,计算公式为
(5)
统计测区检查点最大误差见表2,测区检查点中误差见表3。

表2 测区检查点最大误差统计 m

表3 测区检查点中误差统计 m
3.5 精度分析
根据JTGC10—2007《公路勘测规范》[19],微丘地形重要地物1∶500比例地形图地物点位中误差≯0.30 m,高程中误差≯0.175 m;1∶1 000比例地形图地物点位中误差≯0.60 m,高程中误差≯0.35 m。由表2、表3可知,PPK辅助无人机摄影测量无像控点方案生成的地形图平面中误差为0.14 m,高程中误差为0.33 m,平面最大误差为0.24 m,高程最大误差为0.56 m,均小于2倍中误差,满足1∶1 000比例地形图的成图要求。在测区周边及中间均匀布设6个像控点的空三方案后,成图精度进一步提升,平面中误差为0.04 m,高程中误差为0.12 m,平面最大误差为0.06 m,高程最大误差为0.16 m,均小于2倍中误差,满足1∶500比例地形图的成图要求。另外,采用PPK辅助无人机摄影测量技术手段,共投入2名测量人员、2套GNSS接收机和1台大疆PHANTOM 4 RTK多旋翼无人机,用时2 d即可完成全部外业数据采集和内业数据处理工作。相较于传统的全野外测量方式,减少了测绘外业人员和仪器设备投入,减轻了测绘人员工作强度,提高了工作效率。
4 结论
PPK技术凭借其不受数据通讯与地形限制、定位精度高等优势,在提高无人机摄影测量作业效率与成果精度方面发挥着日益重要的作用。通过新疆苏古尔地区高速公路勘测生产实践,验证了PPK辅助无人机摄影测量技术生成大比例地形图的精度与可行性,与传统的全野外测量方式相比,PPK辅助无人机摄影测量能够在一定程度上减少测绘外业人员和仪器设备投入,提高工作效率,成图的精度满足要求与公路勘测设计的需要。并且生成的实景三维模型等成果可以为规划设计提供有力的数据支撑,有助于提高规划设计的效率与科学性。