地铁隧道表面病害视觉检测技术应用综述
2023-02-19洪江华
洪江华
(中国铁路设计集团有限公司,天津 300308)
1 引言
地铁隧道建设于环境复杂的地下岩土中,在长期运营后,易出现渗水、裂缝等多种表面病害。若检测与修复不及时,这些病害将影响隧道结构稳定性和耐久性。目前地铁检查工作仍以人工为主,该方式存在效率低、主观性强、易漏检等缺点,亟需发展新型高效的隧道表面病害检测与识别技术。目前,基于光学、计算机视觉等方法,国内外人员研发了大量的地铁隧道表面病害视觉检测技术。陈湘生等针对目前隧道人工检测弊端,对比分析了无人机、巡检车等系统装备特点,并指出智能化是未来隧道巡检技术的发展趋势[1];刘德军等也提出集成视觉检测技术的隧道智能检测与识别已成为隧道病害检测研究的主流趋势[2];王剑宏等在分析日本隧道运维现状基础上,提出虽然人工智能在隧道检测领域已取得一些应用发展,但其系统研究仍处于初期阶段[3];李军等在总结相关隧道检测系统的基础上,提出一种基于面阵相机采集的隧道病害视觉检测与识别平台,但其依赖于良好的补光以及数据同步处理[4];基于隧道检测车的图像采集系统,何国华等在分析隧道病害图像特征的基础上,提出改进的测度算法可有效减弱背景干扰影响[5];薛亚东等提出基于线阵相机的图像采集方案以及利用卷积网络提高病害检测与识别精度,在一定程度上推动了隧道病害视觉检测技术的进一步发展[6]。
综上所述,虽然目前国内外针对隧道病害视觉检测系统已开展了大量研究,但是既有研究的系统性不足。为了更系统地梳理该项技术的组成架构,参照计算机体系结构[7],分别从硬件组成、软件框架与病害识别算法等三方面进行综述,并探讨该项技术仍面临的瓶颈问题与发展方向。
2 硬件组成
相较于传统人工巡检,衬砌表面图像自动化采集硬件是隧道表面病害视觉检测技术的重要部分,其图像采集精度与效率是影响该技术整体性能与推广应用的重要因素。TCRACK与MTI-100这2种典型隧道表面病害视觉检测装置的工作场景见图1。硬件功能框图见图2,本小节从相机采集、光源、图像采集控制等方面进行分析讨论。

图1 典型地铁隧道表面病害视觉检测装置

图2 地铁隧道表面病害视觉检测功能框图
2.1 相机采集分析
由于隧道为曲面结构,需多个相机进行分区拍摄来避免曲面效应。以5.4 m内径的盾构隧道为例,将相机环向扫描隧道的长度设计为13 m,则相机对隧道圆周的扫描角度大于240°。如图3所示,采用14台相机对隧道进行扫描,假设单个相机的工作物距为1 800 mm、扫描张角为31.3°,则单个相机可扫描的隧道圆周长为982.82 mm,由此可确保14个相机组内相连相机之间存在公共扫描区域,方便后续进行横向数据拼接。目前工业相机主要有面阵与线阵两类,下面分别对这2类相机的适用性进行计算分析。
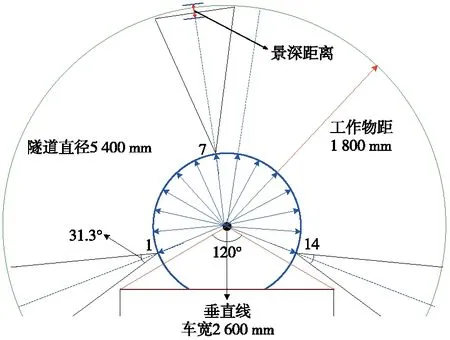
图3 多相机图像采集示意
(1)面阵相机采集
对分辨率1 080 p的面阵相机进行分析:①该相机的成像精度仅有0.91 mm/pixel;②图像采集中会存在相同区域被同时采集的可能性,在一定程度上浪费数据存储和传输带宽;③对补光要求较高,若补光不足,易出现光照不均匀问题。综上,面阵相机在隧道病害移动检测中存在一定的局限性。
(2)线阵相机采集
对分辨率4K的线阵相机进行分析:①该相机的成像精度为0.24 mm/pixel,高于1 080 p面阵相机;②可在车轮上安装编码器,随同车轮运动产生脉冲并触发相机进行采集,基本不会浪费数据存储和传输带宽;③线阵相机为条带扫描,仅需光源照亮少量拍照区域,有利于光源照明设计。综上,线阵相机在隧道病害移动检测中的适用性较高。
2.2 光源照明分析
为了适应地铁昏暗环境,隧道检测车需采用光源辅助照明技术,以下对图像采集中的光源照明技术进行讨论分析。目前线阵相机的光源主要有2种:LED光源和激光光源。若使用LED光源,至少每2个相机配1个LED光源,才能保证其拍摄区域均被光源照亮。设单LED光源的功率100 W,对于搭载超过12个相机的移动小车,至少需要600 W的光源,功耗较高。图4展示了线阵相机和线激光光源组合的一体机,其使用的光源功率仅20 W,功耗较低;但需注意,激光光源与线阵相机要保持相对距离不变,由此保证光源有效照亮图像采集区域。

图4 激光光源与线阵相机集成
2.3 同步图像采集控制
如图5所示,为了实现车不动相机不采集功能,在车轮上安装编码器,随同车轮转动产生触发脉冲;进一步将编码器的输出脉冲通过多路同步驱动器同时转发给多个相机,由此保证所有相机同步进行数据采集与存储。

图5 同步图像采集模块
3 软件框架
隧道为长线状结构,利用图像采集装置获取的数据为一张张离散的图片,而直接从原始图片进行病害检测将面临2个难点问题:①病害区域可能存在于多张图片中,仅处理1张图片存在漏检可能;②隧道环境阴暗,图像质量较差,影响病害识别精度。针对上述问题,在开展隧道病害识别工作前,需完成病害图像数据预处理与增强分析工作。以下从数据-位移同步、图像拼接处理、图像增强等3部分进行综述。
3.1 数据-里程同步分析
数据与里程同步,是后期开展关键区域(如历史病害点)病害检测与识别的关键。如图6所示,将编码器安装于车轮,同车轴同步转动。假定车轮直径为R,转动一周产生的里程l为πR;而编码器转动一周输出N个脉冲并经多路同步驱动器转发给所有线阵相机,每个线阵相机在同步脉冲信号下完成N行图像的采集。若线阵相机每满N行为1帧进行存储,则系统存储了K帧图像序列,则代表车轮转动了K圈,对应的总里程L为

图6 隧道衬砌采集图像拼接流程
L=Kl=KπR
(1)
由上可知,可将图像帧数赋以里程信息,方便后期快速进行隧道关键区域的病害检测与识别。
3.2 图像增强处理
由于隧道图像对比度低,易导致后期病害检测出现漏检,因此需对隧道图像进行增强。目前的图像增强主要有直方图均衡和同态滤波两种方法[9]。直方图均衡是图像空域运算的一种方法,其核心思想是把原始图像的灰度直方图进行非线性拉伸,并重新分配像素灰度值。如图7(b)所示,在经过直方图变换后,由于图像的某些灰度级会空缺,使得增强后隧道图像的对比度过于增强,反而不利于后期病害检测。相比而言,同态滤波是将像元灰度值看作是照度和反射率的反映,并分别处理照度和反射率参数,以达到对图像增强效果,具体结果如图7(c)所示。

图7 衬砌表面图像增强处理结果
4 病害识别算法
病害图像数据识别是地铁隧道表面病害视觉检测技术的核心,面临着算法复杂度与算法实时性的矛盾问题。基于此,从识别算法复杂度、算法研究关注时期2个轴线入手,整理并分析了目前混凝土结构表面病害视觉检测与识别的研究文献。如图8所示,分别按图像信号处理类、浅层模式识别类和深度学习类等3个方面对隧道表面病害识别算法进行综述分析。

图8 隧道衬砌表面病害图像识别算法发展
4.1 图像信号处理类
考虑隧道表面病害与背景像素在亮度上存在差异或相邻像素灰度值存在梯度变化,一系列基于阈值分割或边缘检测的病害检测算法被提出。DAWOOD等[10]在异性扩散与形态学分析基础上,提出了基于Canny边缘检测的病害识别方法。王睿等提出一种基于Prewitt算子与大津阈值分割的表面病害检测方法。针对衬砌表面噪点多问题[11];王耀东等提出通过计算局部区域纹理特征,提高隧道病害检测精度[12];彭斌等利用直方图阈值分析与形态学滤波方法分割隧道渗漏水病害[13]。图9展示了利用大津阈值、区域生长等方法对隧道渗水的检测效果[14]。从实验结果来看,虽然图像信号处理类方法的计算复杂度低、硬件计算需求也不高,但难以克服隧道表面光照不均、背景噪声等干扰。

图9 基于图像信号处理类的隧道渗漏水检测结果
4.2 浅层模式识别类
为了解决图像信号处理类方法易受不均匀光照以及阴影噪声影响,有学者提出将图像不重叠分块,并采用局部图像分类方法进行病害检测[15]。考虑到裂缝边线特性,徐志刚等提取方块图像的局部形状特征(如长宽、面积等)进行裂缝识别[16]。为了提高检测精度,CHEN等采用局部二值特征(Local Binary Patterns,LBP)方法计算方块图像纹理特征,并构建了基于支持向量机的病害检测模型[17];考虑裂缝线状特征,WANG等提出通过DCT计算方块图像变化特征,并应用L2稀疏分类方法实现了裂缝快速检测[18]。以上基于浅层模式识别类的病害检测方法,需要同时拥有良好的分块图像特征与鲁棒的模式分类方法,才能取得较好的病害检测效果,在复杂背景中的适用性无法有效保证。
4.3 深度学习类
近年来,基于深度学习的隧道表面病害检测方法开始被广泛关注。CHA等出利用一种8 层卷积网络提取表面裂缝的语义特征,实现了准确率达98%的裂缝检测效果[19];XU等建立了3层受限波尔兹曼机网络提取方块图像语义特征,并探讨了方块图像的尺寸参数对于裂缝检测性能的影响[20]。上述2种方法虽然可以较好地确定裂缝块状区域,但是无法获取裂缝区域精准的像素面积。为了解决该问题,柴雪松等利用超像素分割确定裂缝候选区域,并进一步应用残差深度分割网络提取隧道裂缝病害像素区域[21]。针对隧道复杂环境干扰问题,苗晓坤提出在Unet像素分割网络的基础上,融合隧道病害的低层特征和高层特征,来提高对隧道裂缝病害的检测精度[22]。
针对隧道表面渗漏水病害检测与识别问题,薛亚东等提出了基于Faster R-CNN的渗漏水检测框架,但由于有效标记样本的数量不足,导致该框架对渗水区域的检测精度仅有80.91%[6];LI等也提出使用Faster R-CNN检测渗漏水病害,其通过优化特征融合方式在一定程度上提高了病害检测精度[23]。上述2种方法仅停留对渗漏水区域的检测上,均无法有效地提取渗漏水区域像素面积。针对此问题,黄宏伟等提出了一种基于全卷积网络的隧道病害检测模型,实现了对渗漏水病害的像素级检测[14]。赵帅等提出将Mask R-CNN网络用于渗漏水病害检测,并验证了该模型在复杂背景下可实现渗漏水病害的精准定位与像素分割[24]。
5 现状分析与展望
近年来,针对隧道表面病害视觉检测与识别技术,国内外研究人员已进行了大量的研究。本小节将从硬件、软件以及算法等3方面梳理该技术仍面临的挑战问题,并指出相关探索研究方向。
5.1 硬件采集方面
14台相机均以隧道截面中心为圆心,同时扫描衬砌关键区域的表面病害,其中所有相机到隧道衬砌的工作物距是相同的。但考虑检测车在隧道行驶中,车辆振动、线路转弯等多方面因素,均可能导致相机的物距发生变化。当相机物距变化范围超过该相机景深值时,其采集的图像数据会出现模糊。此外,相机标定一般是根据直径5.4 m的标准盾构隧道进行的,而针对地铁线路中直径6 m的大隧道,应用根据标准隧道尺寸标定好的相机,基本无法正常地进行数据采集。如何解决由于相机工作物距变化而出现的图像数据采集失效问题,是未来隧道表面病害视觉检测技术中硬件方面亟待解决的一大问题。
5.2 软件处理方面
在图像采集中,每个相机对隧道衬砌表面的图像采集分辨率必须是相同的,这对于图像拼接至关重要。但在实际应用中,相机安装误差、车辆载重下沉、行驶振动等因素,均可能导致相机的工作物距出现差异性变化,进而使得每个相机在横向与纵向上对衬砌表面病害尺度的感知出现差异。如图10所示,相机1的蓝色部分拼接较好,相机2红色部分显示在纵向采集分辨率中出现变化,导致图像拼接结果中部分区域出现错位现象,给隧道病害识别带来不利因素。针对此问题,尝试跟踪每个相机的工作物距变化,并将变化参数反馈于多相机的图像数据拼接中,是未来有望解决移动场景中隧道表面病害图像拼接问题的一个思路。

图10 隧道衬砌图像拼接异常示例
5.3 识别算法方面
目前一系列基于深度学习的隧道病害检测与识别网络被相继提出[19-24],这极大地推动了该技术在隧道巡检领域的发展。但深度学习网络的训练需要大量的标记数据,由于隧道巡检技术尚未成熟应用,导致有效的标记数据数量有限。据已有研究,1 km的隧道巡检将产生超过200GB的图像数据,其需要专业人员去标记这些大量的隧道图像数据,费时耗力。此外,由于部分病害具有特殊的边界渗流特性(如渗水)或具有极低的信噪比(如裂纹),也导致获取大量有效的标记数据极为困难。综上,隧道巡检面临着先“人工”、再“智能”的数据瓶颈,而开展小样本监督学习或半监督学习,是未来解决数据瓶颈难题的一个可能方向。
6 结论
隧道衬砌表面病害检测与识别已成为地铁巡检中的一项重要内容,针对隧道表面病害视觉检测技术发展趋势,分别从硬件组成、软件架构与识别算法等方面进行综述,并形成以下结论:①以线阵相机+线激光源的硬件组成框架,具有高精度、高效率、低功耗等优势,符合未来地铁隧道快速巡检需求;②在数据与位移准确同步基础上,图像增强与拼接处理可为后期隧道病害识别提供必要的数据基础;③相较于其他类方法,深度学习方法可取得更好的病害检测与识别效果。最后,总结分析了目前该技术在硬件、软件及算法等方面待解决的难题和可能的研究方向,为该技术的进一步研究提供参考。