智能自动化机械手在环保车上的研究应用
2022-12-25黄闯
黄闯
(广州市环境卫生机械设备厂有限公司,广东 广州 510450)
1 环保车现有上料方式
目前国内环保车一般采用作业人员人工推桶上料,手动靠置于环保车翻转装置上,再操作电气按钮驱动翻转装置倾倒垃圾桶中的垃圾,后再人工推桶放回原处。图1 为环保车人工侧上料,图2 为环保车人工后上料。除环保车驾驶员外,需另配备1~2 名环卫作业人员。劳动强度大,上料效率低,运营人力成本高,卫生条件差,同时也存在作业安全风险[1]。

图1 环保车人工侧上料

图2 环保车人工后上料
2 新型车载智能自动化机械手上料机构
车载智能自动化机械手由底座、吊臂、连杆、导轨、翻转臂组成四连杆机构来实现各所需动作,如图3 所示。底座通过拉码和连接板固定于底盘纵梁上面。在垃圾收运时驾驶员通过整车监控系统来判断机械手与垃圾桶之间的距离,从汽车底盘取力,带动液压油泵输出高压油,驱动伸出油缸使导轨运动,从而带动翻转臂的伸出与缩回,如图4 所示[2]。翻转臂到达合适位置后,抱桶油缸驱动抱桶臂运动,使垃圾桶被紧紧的束缚夹紧在抱桶臂中间。再控制翻转油缸驱动翻转臂沿着导轨翻转,使垃圾桶中垃圾倾泄到车厢压缩腔内,整个机械臂的操作顺序为伸出、抱桶、翻转、下降、松桶、缩回,如图5 所示。可伸出汽车侧面1.5m 对垃圾桶进行抓取,并翻转150°倾倒垃圾[3]。
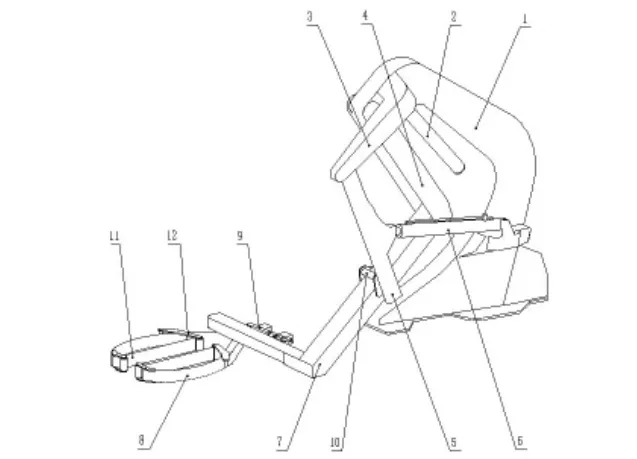
图3 机械手结构
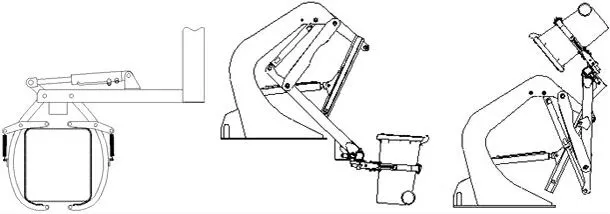
图4 机械手抱桶和翻桶
图5 作业过程
3 车载智能自动化机械手上料机构设计计算
3.1 翻转能力计算
(1)机械手原位抱桶翻转,如图6 所示。
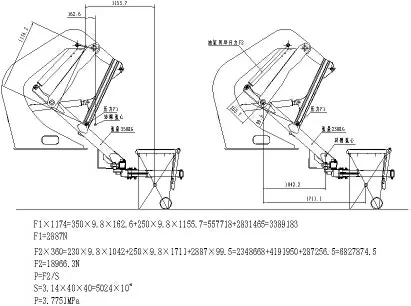
图6 机械手原位抱桶翻转
(2)机械手臂最大伸出距离1.5m 处抱桶翻转,如图7 所示。
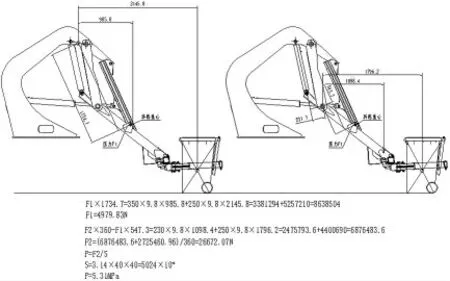
图7 机械手臂最大伸出距离处抱桶翻转
机械手系统压力定为14MPa>5.31MPa,故机械手抱桶臂在垃圾桶满载时也能轻松翻转倾倒。
3.2 抱桶臂受力分析
设定240L 塑料桶满载后最大重量为m=250kg,G=m×g=250×10=2500N。
设定抱桶带与塑料桶之间的摩擦系数为0.5,抱带对抱臂产生的压力为F,抱臂受到的垂直向下的压力F1,则计算方式如式(1)所示。

以抱臂上两处转轴为受力面进行分析,分别2500N 的力,经受力分析最大应力处值为197MPa<235MPa(材料本身屈服强度)。
安全系数为u=235/197=1.193,满足设计要求。
抱桶臂结构采用柔性设计,可适应不同大小的120L和240L 标准塑料垃圾桶,适应范围广,如图8 所示。
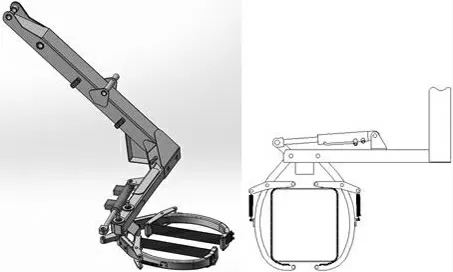
图8 抱桶臂
3.3 在车辆底盘上的布置方式
该机械手机构位于底盘驾驶室后方,采用连接件与底盘大梁连接固定,从底盘发动机取力,带动液压油泵,输出高压油,再通过液压阀组控制各动作油缸伸出和缩回,输出动力驱动结构臂运动,实现各个动作的操作,如图9 所示。
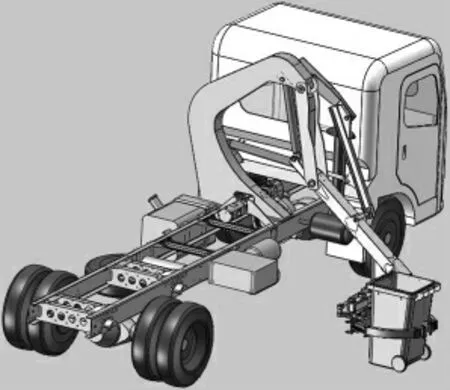
图9 车辆底盘上的布置方式
机械手操作方式分为自动与手动两种控制方式,其中自动方式为:控制操作手柄朝正前方“伸出”位置推出,此时通过驾驶室监控器观察机械手抱臂系统与垃圾桶之间的距离,使机械手抱捅臂到达抱桶位置(此位置需实际操作后确定);控制操作手柄朝右侧“抱桶”位置推出,且维持操作手柄处于右侧“抱桶”位置,使抱臂抱紧垃圾桶;此时机械手抱臂系统自动实现举升、下降、松桶、收回等动作。采用了多方位的监控系统,做到了收运动作的可视化。既保证了车辆的正常收集作业,也提高了作业安全性,如图10 所示[4]。

图10 操作手柄和视频监控
3.4 新型车载智能自动化机械手上料机构电控设计
电控设计如下:①装卸料转换开关。②手自动切换开关。③顶盖门转换开关。④操作手柄开关。⑤举升感应开关。⑥下降感应开关。⑦夹桶感应开关。⑧松桶感应开关。⑨回位接近开关。⑩顶盖门感应开关。控制器模块。保险。液压多路阀。续流二极管。
电气控制系统有手动和自动两种工作模式,便于日常操作、特殊场景和维修不同情况下使用。油缸上集成有五个感应开关,检测油缸的初始和伸出到终点的位置,输入信号作为逻辑控制判断的依据。通过操作手柄开关来控制机械手各个不同机构的运动,机构的伸出和回位。抱桶机构的抱桶和松桶,机械手机构的举升和下降,顺序是伸出、夹桶、举升、下降、松桶及回位。在操作操作手柄开关时也应按照这个顺序,若未按这个顺序操作,因控制程序逻辑上已做防呆处理,也不会造成机构损坏。每个动作的作业时间按实际情况作优化调整,减少震动使运行平稳,并确保一次作业时间高效,如图11 所示[5]。
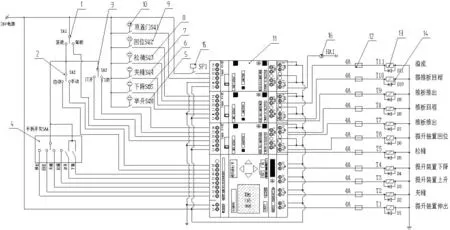
图11 电控系统电路
自动操作模式通过手自动切换开关转换。先向伸出位推动操作手柄开关,机械手机构伸出直至离垃圾桶合适距离,向夹桶位操作手柄,进行夹桶作业,完成后,感应开关SQ4 发出对应信号,按控制程序进行举升倒料,到位后感应开关SQ6 发出对应信号,控制机构翻转下降,到位后感应开关SQ5 发出对应信号,完成松桶的动作,感应开关SQ3 发出对应信号,控制机构回位,到位后感应开关SQ2 发出信号,停止动作,一次作业循环动作完成。若出现特殊状况需要停机时,按下操作手柄开关中“下降”按钮,为减少按钮数量,于自动模式,当急停按钮用。
手动操作模式通过手自动切换开关转换。先向伸出位推动操作手柄开关,到位后将操作手柄开关回位,机构停止工作。其他动作的作业方式类同。
4 新型车载智能自动化机械手上料机构的试验及应用
车载智能自动化机械手上料机构是一种全新的自动上料机构,为了测试实际效果,本文采用1 台总质量为18t 的机械手环保车作为试验样车,如图12、图13所示,测试数据如表1 所示。

图12 试验样车

图13 翻塑料垃圾桶试验
从翻桶试验及表1 可以看出,驾驶员不下车即可操作,操作便利,舒适性好,同时不下车也提高了安全性。实际装载速度15s,速度快且效率高。良好达成了设计初衷。该机械手装置可以广泛应用于环保车各种不同车型和不同吨位的产品上。
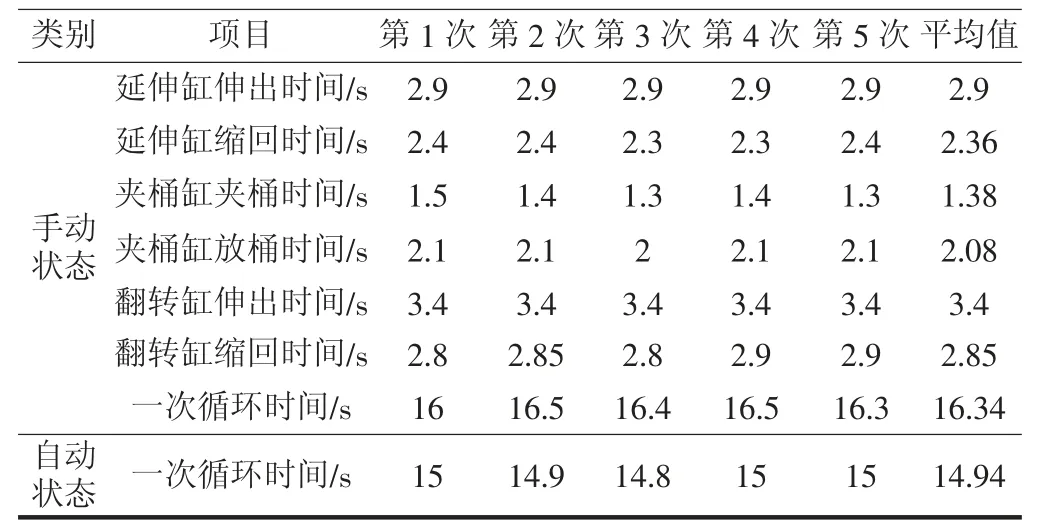
表1 机械手上料机构的测试数据
5 结语
通过新型车载智能自动化机械手上料机构的研究,应用于环保车上实现了垃圾桶的自动抓取、倾倒、回位等动作,驾驶员兼环卫作业工人在人不下车的情况下就能完成所有环卫作业,达到了以下良好效果。
(1)提升了国内环保车自动化水平,为环保车技术发展提供了新的借鉴。
(2)提高了车辆作业效率,实现垃圾收运的高效化,减轻了环保作业人员劳动强度,同时不下车作业也提升了人身安全性。
(3)降低了运营成本,以前1 名驾驶员加1~2 名环卫作业人员,现只需1 名即可完成。
(4)在目前疫情常态防疫的情况下,作业卫生条件好,不与垃圾接触,对作业人员防疫也是一种保护。
