机载SBAS 接收机完好性服务性能分析
2022-12-19刘瑞华席泽谱
刘瑞华,刘 杰,席泽谱
(中国民航大学电子信息与自动化学院,天津 300300)
在民用航空领域,随着对定位精度和完好性要求的提高,卫星导航系统如全球定位系统(GPS,global positioning system)等已不能满足用户对导航服务性能的需求,由此星基增强系统(SBAS,satellite based augmentation system)应运而生。SBAS 能够全面改善GPS的所需导航性能(RNP,required navigation performance),旨在为民航用户提供从航路阶段到一类精密进近阶段所需要的导航信息[1-2]。
国内外诸多学者针对SBAS 进行了大量研究:文献[3-4]对SBAS 报文播发及播发特性进行研究,研究表明系统播发的报文信息可保证全球导航卫星系统(GNSS,global navigation satellite system)的完好性及可用性;文献[5]测试了欧洲地球静止导航覆盖服务系统(EGNOS,European geostationary navigation overlay service)的服务性能,测试结果表明其水平定位精度(95%)为1 m,垂直定位精度(95%)为2 m 及以上;文献[6]对太平洋GNSS 试验台的SBAS 算法进行研究,并使用在曼谷站点收集的初始数据进行系统性能分析;文献[7]选取测试点对广域增强系统(WAAS,wide area augmentation system)进行定位精度和完好性性能评估。但是以上研究均只对实测数据进行了分析,考虑存在故障误差时对SBAS 完好性服务性能影响的分析相对较少。因此,本文将从实测数据及存在故障误差时的SBAS完好性服务性能进行分析。
美国航空无线电技术委员会(RTCA,Radio Technical Commission for Aeronautics)颁布的DO-229E 文件[8]:GPS/SBAS 机载设备最低运行性能标准(MOPS,minimum operational performance standards)提供了关于SBAS 测距信号特征规范及其完好性和改正数据的内容和格式,并制定了增强信息播发的协议。该MOPS已具备国际标准的性质,且根据该类系统兼容、可互操作的原则,中国建设北斗星基增强系统(BDSBAS,Beidou satellite based augmentation system)也将遵循此标准。以WAAS 为例,通过解析处理增强报文、导航数据和观测数据,根据故障完好性监测及相应的增强算法对机载SBAS 接收机完好性服务性能进行分析与研究,也可为BDSBAS 以及双频多星座(DFMC,dual-frequency multiconstellation)的SBAS 完好性评估提供参考。
1 SBAS 完好性服务性能分析
1.1 SBAS 原理及完好性监测说明
WAAS 是主要应用于航空领域的导航增强系统,其广域参考站(WRS,wide area reference station)监测并收集所有的卫星数据被传至广域主控站(WMS,wide area master station),WMS 对导航数据处理分析,计算测距、差分改正信息及完好性信息,产生校正数据,然后经上行注入站传至地球同步轨道(GEO,geostationary earth orbit)卫星,通过GEO 卫星播发这些增强信息至用户端。用户端GPS/SBAS 接收机在接收处理GEO 卫星广播的SBAS 增强报文的同时,还接收处理GPS 系统的中圆地球轨道(MEO,medium earth orbit)卫星导航信息。
差分改正数据用于修正GPS 广播的测距误差,并进行定位解算;完好性数据用于计算用户保护级(PL,protection level),评估定位结果的可靠程度,保护级越小,则定位精度越高,其可分为水平保护级(HPL,horizontal protection level)和垂直保护级(VPL,vertical protection level),两者用XPL 表示。告警门限(AL,alert limits)指系统在规定的时间内不需要向用户发出告警所允许的最大定位误差(PE,positioning error)。AL 可分为水平告警门限(HAL,horizontal alert limits)和垂直告警门限(VAL,vertical alert limits),两者用XAL 表示。同样地,PE 也可分为水平定位误差(HPE,horizontal positioning error)和垂直定位误差(VPE,vertical positioningerror),两者用XPE 表示。如果XPL 超过了XAL,飞机就不能提供支持该航段预期操作所需的完好性。因此,在机载接收机用户端完好性监测中,对以上XPL、XAL 和XPE 三者的分析至关重要。
1.2 WAAS 报文参数说明
MOPS 定义了64 种SBAS 导航报文相关的类型(MT,message type),其中,差分改正和完好性的相关参数由MT 2~5、MT 6、MT 7、MT 9、MT 10、MT 18 和MT 24~26 等报文播发。
WAAS 的报文长度为250 bit,以250 bit/s 的速率传输,传输内容分别是:一个8 bit 的报头、一个6 bit的报文类型、212 bit 的报文和24 bit 的CRC(cyclic redundancy check)校验位。以MT26 为例,分析WAAS报文格式并对与完好性相关的参数进行解析。MT26的数据格式如图1 所示。

图1 MT26 的数据格式Fig.1 Data format of MT26
每个报文都包含一个频带编号和一个数据块ID,前者是确定对哪个频带中的电离层格网点(IGP,ionospheric grid point)进行修正,后者用于指示相应频带中点的位置。每个频带最多可以分成14 个数据块,数据块0 包含频带中指定的前15 bit 的IGP 改正值,数据块1 包含第16~30 bit 的IGP 改正值。
MT26 还提供了每个IGP 的垂直延迟改正数误差指数(GIVEI,grid ionosphere vertical error index),GIVEI是IGP 垂直延迟误差标志,若GIVEI 过大,则该延迟改正不可用。通过IGP 垂直延迟误差(GIVE,grid ionosphere vertical error)与GIVEI 表征关系表可查到GIVE、GIVEI 和电离层延迟修正精度()的关系[8]。
1.3 定位误差解算
1.3.1 伪距及误差处理
伪距测量值表示如下

式中:ρi为星地几何距离;c 为光速;δtu、δt(s)分别为接收机钟差和卫星钟差;σinon、σtrop、σmul分别为电离层延迟、对流层延迟以及多径延迟;σρ表示未体现在上式中各种误差的总和。除多径延迟、接收机延迟和对流层延迟修正的补偿来自机载接收机用户端相应修正模型外,其他延迟均来自增强报文[9]。
1.3.2 快变改正数
MT2~5/24 广播快速变化的报文,接收机解析出报文后,可计算快变的卫星钟差改正值

式中:t 为当前时刻;tof为当前广播的快变改正值的对应时刻;PRC 为快变修正的伪距改正量;RRC 为伪距改正量变化率,RRC 计算需PRC 内插得到[10]。在接收机内部通过当前广播的最新的快变改正量PRCcurrent与先前接收到的PRCprevious差分计算RRC,即

式中tof,previous为PRCprevious对应时刻。因此,t 时刻经WAAS快变修正后的当前伪距观测值为

1.3.3 慢变改正数
MT25/24 对长期慢变时钟误差(钟差)和缓慢变化的卫星位置(星历误差)进行修正,其播发卫星x、y 和z 轴3 个方向的改正数和时钟信息。在定位计算中,用户利用可见星的广播星历数据计算各卫星的钟差和位置误差,其中,增强信息中卫星钟差改正值为

式中:δaf0是钟偏误差改正值;δaf1是时钟漂移误差改正值;t0代表误差改正值的适用时间,通常为2 min;δafG0是对GLONASS 卫星的附加修正,因此GPS 卫星的δafG0=0。将增强信息中的误差改正值δΔtsv(t)添加到导航报文提供的时钟误差估计值Δtsv(t)中,得到修正后的卫星钟差

星历误差能够表示卫星轨道值与真实轨道值的偏差,影响卫星位置的计算,包括3 个与星历有关的卫星位置改正量[δx δy δz]T和一个缓慢变化的星钟改正量因此,WAAS 卫星轨道误差改正量为

将该误差改正量添加到使用广播星历计算的卫星坐标向量[xkykzk]T中,得到经WAAS 改正后的卫星位置坐标为

在已知机载接收机端天线真实位置坐标情况下,结合用户真实位置,来修正伪距测量值。
1.4 完好性保护级解算
接收机根据报文中接收处理的完好性参数:用户差分距离误差(UDRE,user differential range error)、电离层格网点垂直延迟误差,综合快变和慢变误差修正的精度()与电离层延迟修正的精度()等,将伪距域误差限值的计算转换到定位域中计算。
定位域中系统完好性参数指标HPL 和VPL 表示如下

式中:KH,NPA为非精密进近阶段(NPA,non-precision approach)的HPL 系数,KH,NPA=6.18;KH,PA为精密进近阶段(PA,precision approach)的HPL 系数,KH,PA=6.0;KV,PA为PA 模式的VPL 系数,是以完好性概率为10-7置信度计算出来的分位数,KV,PA=5.33;dU为超出天向真实误差分布的模型分布标准差;dmajor是不确定性误差椭圆的半长轴,计算如下


式中:RSSUDRE为MT10 中的平方根标识;σi,UDRE为用户差分距离误差;δUDRE为用户差分伪距误差系数,δUDRE=1;ε 为MT 2~7、10、24 和25 等报文的各类降效参数。

式中θi为用户到第i 颗星的仰角。

对于加权最小二乘的位置解来说,投影矩阵定义为

式中:观测卫星的几何矩阵G 的第i 行可以表示如下

αi为用户到第i 颗星的方位角;权重矩阵定义为
2 数据处理与完好性服务分析
为了准确地评估不同位置精度和完好性服务性能,采用美国境内站点1:西部阿拉斯加地区(cdb8 站,55.2°N,162.7°W)和站点2:中部地区(zlc1 站,40.8°N,112.0°W)两个地面监测站一天的广播星历数据(*.yyn)、观测数据(*.yyo)、WAAS 广播的增强数据(*.nstb)进行分析。
2.1 机载接收机精度和完好性分析
服务层完好性主要表现为定位误差(PE)超过各航行阶段的告警门限(AL)时,系统将发出告警,对东、北和天向精度处理取95%置信度[11-12]。
图2—图3 为站点1 和站点2 SBAS 修正前后东、北、天定位误差对比图;图4—图7 为站点1 和站点2修正的水平/垂直定位误差、保护级及告警门限对比图,其中,VAL1 表示LPV-200 的垂直告警门限,VAL2表示LPV 的垂直告警门限。
使用观测数据和广播星历可得到GPS 定位误差。同一时间内,结合WAAS 改正报文可得到修正后的定位误差。从图2—图3 可看出:经SBAS 修正后定位结果更加平滑且精度更高,修正效果明显,可达50%以上。整体来看站点2 修正效果好于站点1,即美国中部地区修正效果好于阿拉斯加地区。

图2 站点1 SBAS 修正前后东、北、天定位误差对比Fig.2 Comparison of E/N/U positioning errors before and after SBAS correction at station 1
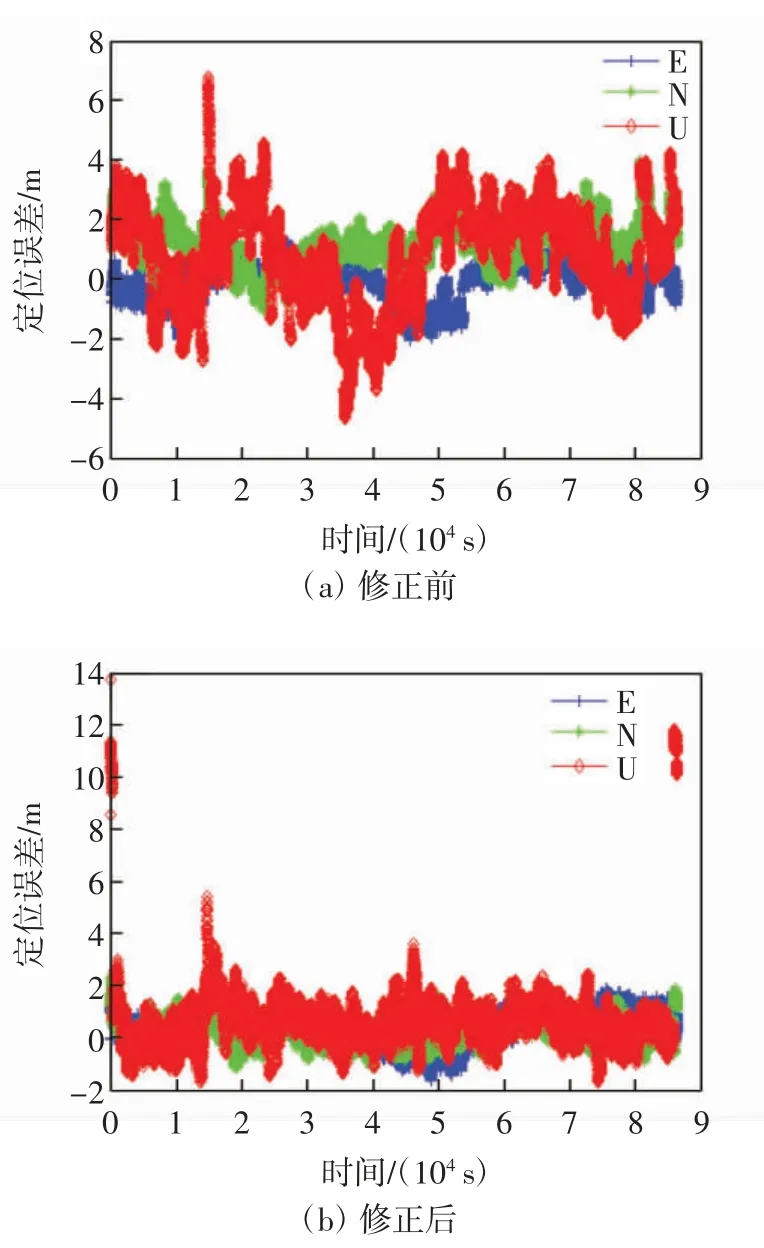
图3 站点2 SBAS 修正前后东、北、天定位误差对比Fig.3 Comparison of E/N/U positioning errors before and after SBAS correction at station 2
从图4—图7 可看出:修正后站点1 的HPE 和VPE基本都在3 m 以下;HPL 和VPL 基本都集中在40 m以下,即阿拉斯加地区监测站除个别时刻外完好性保护级满足LPV 进近所要求的HAL=40 m,VAL2=50m;修正后站点2 的HPE 和VPE 基本都在2 m 以下,HPL在10 m 左右,VPL 集中在10~20 m 之间,美国中部地区完全满足LPV-200 进近时HAL=40 m,VAL1=35 m的要求;XPL 值在美国中部地区比在边缘的阿拉斯加地区更小,因此美国中部地区能更好地满足更高精度的进近服务要求,同时也有更高的完好性可用性能。

图4 站点1 修正后的水平/垂直定位误差Fig.4 Corrected HPE/VPE at station 1

图5 站点1 修正后水平/垂直保护级及告警门限对比Fig.5 Comparison of XPL/XAL at station 1

图6 站点2 修正后的水平/垂直定位误差Fig.6 Corrected HPE/VPE at station 2

图7 站点2 修正后水平/垂直保护级及告警门限对比Fig.7 Comparison of XPL/XAL at station 2
2.2 卫星故障时完好性监测分析
由于卫星故障发生率越来越低,在实际中难以直接采集到故障样本,因此模拟了跳变式的阶跃型故障和缓变式的斜坡型故障对完好性服务性能的影响,以此来讨论机载SBAS 接收机完好性监测能力。
MOPS 要求在故障发生前卫星至少有1 h 的良好可见条件,因此选择站点1 数据对卫星进行可见星数量和可见星持续时长分析。图8—图9 分别为站点1的可见星数量图和持续时长图。
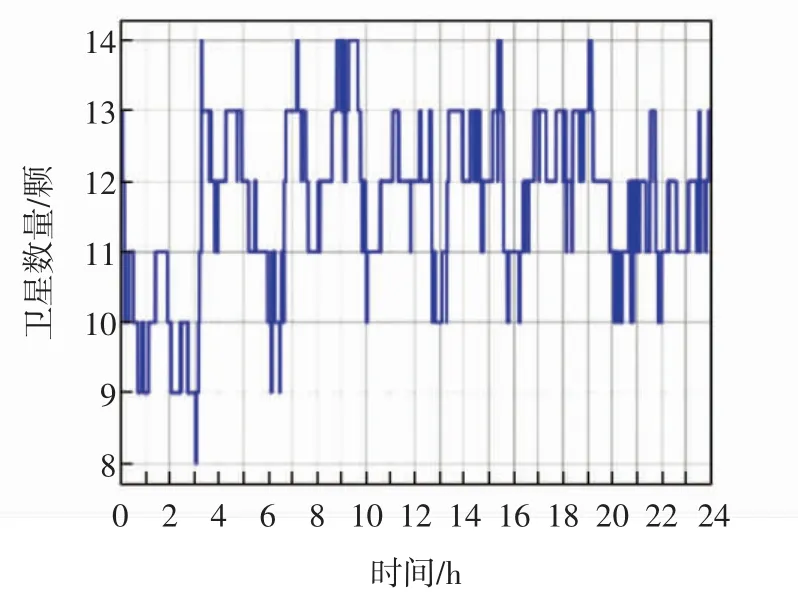
图8 站点1 可见星数量Fig.8 Number of visible stars at station 1
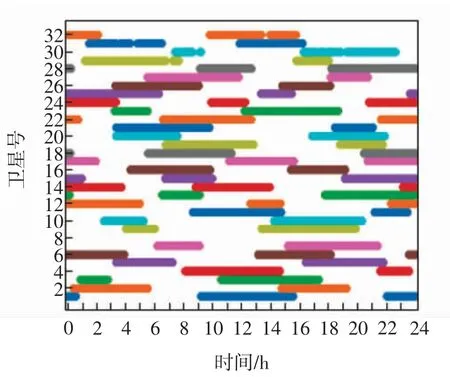
图9 站点1 可见星持续时长Fig.9 Duration of visible stars at station 1
从图8—图9 可看出:在站点1 处观测时间内可见卫星最少为8 颗,最多可达14 颗,能够满足PA 阶段对可见星数目的要求。根据图8 可以选取故障卫星号及故障添加时间,确保该卫星在该时段处于工作状态。此处选择25 号卫星在4~5 h 内分别添加故障。
2.2.1 阶跃故障
图10 为站点1 无故障与加入阶跃故障值为300 m时HPE/VPE 对比图。
从图10 可看出:HPE 和VPE 均已超过LPV 的VAL=40 m、LPV-200 的VAL=35 m 的要求。加入故障后误差值已经将无故障误差值掩盖,因此定位精度和完好性都不能满足任何PA 的要求。

图10 站点1 无故障与加入阶跃故障后HPE/VPE 对比Fig.10 Comparison of HPE/VPE between no fault and step fault at station 1
2.2.2 斜坡故障
图11—图12 为站点1 加入斜坡故障值为0.01 m/s 时GPS/WAAS 定位误差对比图,图13 为无故障与加入斜坡故障时HPE/VPE 对比图。
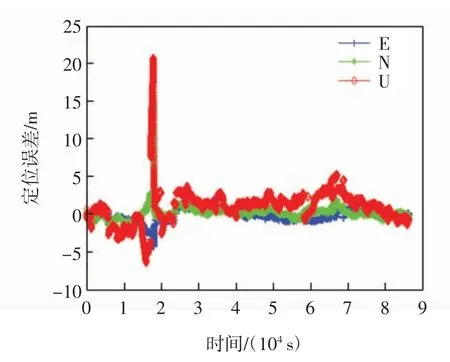
图11 站点1 加入斜坡故障后GPS 定位误差对比Fig.11 Comparison of GPS positioning errors with ramp fault at station 1
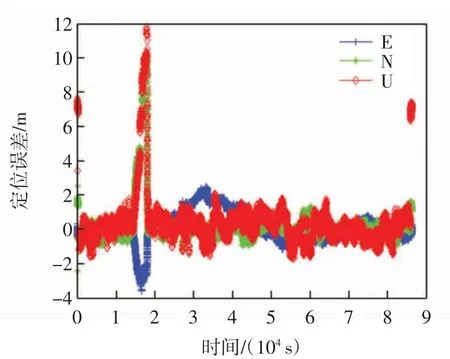
图12 站点1 加入斜坡故障时WAAS 定位误差对比Fig.12 Comparison of WAAS positioning errors with ramp fault at station 1
从图11—图13 可看出:即使在故障情况下,WAAS使用增强信息后,对GPS 仍有良好的差分修正作用,天向误差由最大20 m 减小到10 m 左右,东向由5 m减小到3 m 左右,定位误差改善程度可达50%以上;有故障时,经接收机端处理,系统发生定位不准确现象,PE<AL 时将继续保障LPV-200 完好性要求。

图13 站点1 无故障与加入斜坡故障后HPE/VPE 对比Fig.13 Comparison of HPE/VPE without fault and with ramp fault at station 1
2.2.3 故障排除
图14 为站点1 故障添加1 h 内有/无故障及故障卫星排除后HPE 与VPE 对比图。

图14 站点1 有/无故障及故障卫星排除后的误差对比Fig.14 Comparison of error with/without fault and after fault elimination at station 1
从图14 可看出:原始数据(无故障)与故障卫星排除后曲线基本拟合,去除该颗故障卫星后,定位精度与完好性能达到与无故障时较为一致的导航效果,可继续当前航行或进近。
3 结语
在分析定位精度和完好性参数并结合增强算法的基础上,根据监测站数据进行机载接收机完好性服务性能分析,得到如下结论:①在整个广域增强系统监测区域中,差分修正效果美国中部地区要好于边缘区域,主要原因是边缘区域的监测站分布不均匀,其几何强度较弱,导致轨道的差分改正信息改正能力下降,影响其定位精度;②不同监测站保护级和同一站点不同时刻保护级略有不同,这与各站位置的选取和计算过程中的误差有关,整体得到的结果也较为理想;③不同故障类型会影响定位结果,但去除该颗故障卫星后,与无故障情况结果基本一致。除此之外,后续研究还可继续探讨电磁干扰等其他能引起故障的因素。
