基于MEMS陀螺仪谐振梁的不确定度分析*
2022-12-10李敏,曹乐
李 敏,曹 乐
(上海工程技术大学 电子电气工程学院,上海 201620)
0 引 言
近年来,利用微制造技术开发了一系列微机电系统(MEMS),如MEMS陀螺仪[1,2]。MEMS具有体积小、能耗少、产品造价低的优点,但与常规机械陀螺相比,构件易发生大变形,不可避免地出现尺度效应,进而产生非线性因素,导致其在制造过程中出现较大的不确定性,性能上与传统机械陀螺存在较大差距,难以满足工业生产对高精度的需求。同时,由于非线性因素的影响,MEMS陀螺仪会出现明显的频率偏移或刚度的软硬化特征,使其微结构的动态响应受到影响[3,4]。Zhao S M等人[5]指出当谐振梁受到轴向张力时,会产生较大位移,导致梁的非线性振动,使微机械谐振加速度计的精度和稳定性受到影响。由于非线性项的存在,谐振梁的谐振频率随振幅的增大发生偏移[6~8]。
同时,由于MEMS陀螺仪在结构加工及参数测量过程中均会引入尺寸误差,进而无法确定各部分构件对陀螺仪性能产生的影响,不利于结构设计。基于以上分析,确定性的设计方法无法控制产品质量。因此,通过采用统计方法研究MEMS陀螺仪的结构参数具有现实意义。Mawardi A等人[9]基于样本的随机模型研究了光纤拉制过程中不确定因素的影响。Kim Y W等人[10]提出了一种基于设计变量样本的结构系统模态特性的不确定性估计方法。Yong W K等人[11]针对MEMS陀螺仪的几何不确定性提出了一种基于样本的统计分析方法,通过约束其几何参数来提高陀螺的稳定性。刘梦霞等人[12]基于双端固支音叉的非线性振动模型,采用施加静电载荷的方法改变双端音叉谐振器(DETF)的长度和宽度,进行仿真实验。
为了实现结构的可靠性设计,本文对该MEMS陀螺仪谐振梁的结构不确定度进行可靠性估计。基于MEMS陀螺仪谐振梁的振动模型,考虑由加工过程引起的结构尺寸的不确定性,根据所选样本的随机模型分析不确定的结构参数对MEMS陀螺仪谐振梁性能的影响,得到其中的关键因素,为相关传感器敏感结构的设计及优化提供参考。
1 模型建立
本文对图1中MEMS陀螺仪敏感结构的动态性能进行研究,该结构包括:静电梳齿驱动器、质量块、杠杆放大装置和两个DETF。其中,质量块在x轴方向的驱动力下做被迫振动,若z轴方向有外部角速度信号Ω输入,则将在y轴方向产生一个与输入角速度信号成正比的科氏力,杠杆放大机构将此科氏力进行放大,并传递到两个DETF上产生差动输出,解调该差动输出信号,即可得到输入角速度Ω。

图1 MEMS陀螺仪结构简图
MEMS陀螺谐振梁的长度远大于它的宽度和厚度,可将其假设为伯努利梁,微元受力分析如图2所示。

图2 谐振梁的微元受力示意
本文通过构建谐振梁的简化模型,分析其动态结构特性,如图2所示。其中,w(x,t)为梁的横向振动位移,N为施加于谐振梁上的初始纵向张力,F为由横向振动产生的张力,θ为张力与x轴的夹角,梁受到的弯矩为M,垂直剪力为U,p(x,t)表示梁单位长度上分布的外力。根据达朗贝尔原理,建立竖直方向上的微分方程并化简[13]
(1)
基于线性应力应变假设,张力F可表示为
(2)
式中E,A分别为谐振梁的杨氏模量与横截面积,L为谐振梁的长度。对微元dx利用力矩平衡,并忽略二阶小量,得到
U=∂M/∂x
(3)
采用平截面假设,得到
M=EI∂2w/∂x2
(4)
同时,考虑系统等效阻尼,得到梁的非线性振动方程

=p(x,t)
(5)

w(x,t)=φ(x)q(t)=φ(x)Qmsin(ωt+φ)
(6)
式中φ(x)为梁的一阶振型函数,q(t)为梁的时域振动函数。
本文通过引入梁的附加伸长量,获得梁的总能量
(7)
同时,将梁的动能沿着纵向进行积分,采用拉格朗日分离法,得到总动能
(8)
式中ma为谐振梁梳齿的附加质量,xa为梳齿与谐振梁固定端的距离。
通过构建Duffing方程得到系统非线性动态方程
(9)
式中m为等效集中质量,k1,k3分别为线性刚度系数与非线性刚度系数
(10)
(11)
(12)
非线性振动系统等效固有频率表示为
(13)
fe=ωe/2π
(14)
式中qm为谐振梁的振幅达到给定力下的最大值,其外部驱动力可表示为F=F0cosωt,当ω=ωe时,谐振梁的最大位移为
(15)
式中c为等效阻尼,ω0为谐振梁工作于线性振动状态且无阻尼时的固有谐振频率。显然,当谐振梁受到由几何非线性引起的非线性项作用时,会使系统的共振频率随着振幅的增大而增大。固有谐振频率表示为
(16)
2 不确定度分析
利用输入参数的概率分布函数表示其不确定度,并通过蒙特-卡洛采样方法生成参数的随机样本,基于确定性模型可分析该样本对输出参数不确定度的影响。本文根据输入参数谐振梁长度L,宽度B,厚度H及附加质量ma的分布情况对输出参数等效固有频率fe的不确定度进行分析。假设各输入参数对应的选值集合均满足均值为μ,标准差为σ的正态分布,本文将均值作为输入参数的设计值,标准差表示MEMS陀螺仪谐振梁在加工过程中的设计误差,输入参数的不确定度Cov定义为对应标准差与均值的比值,即Cov=σ/μ,显然,标准差越大、均值越小的输入参数的不确定度越大,而确定参数的不确定度为0。
通过对输入参数与输出参数进行随机收敛分析进一步确保所选样本具有代表性,从而确定样本个数。在随机收敛分析过程中,输入与输出参数的均值与方差均会随着样本数量的增加收敛至相应的设计值与计算值,从而确定样本的个数Ns。参数样本选定后,将各个样本分别代入确定的模型中,获得输出参数的不确定度,进而评估可变输入参数对输出参数的影响。
由于输入参数具有可变性,通过确定性模型计算得到的输出参数才具有不确定性,本文定义四分位差IQR来量化输出参数的不确定度,该值代表输出参数分布中25%概率位置对应值P25与75%概率位置对应值P75的差值
IQR=P75-P25
(17)
3 收敛性分析
本文根据输入参数(L,B,H及ma)的分布情况,利用确定性模型分析对fe的影响。为了使输出参数的分布更具代表性,需要大量的输入参数样本,由于该过程计算量较大,无法直接应用于实际操作。因此,本文通过收敛分析方法确定能代表输入参数组合分布的最少样本数量,同时保证输出参数的稳定分布。
MEMS陀螺仪谐振梁尺寸输入参数的设计值如下:材料密度为2 350 kg/m3,谐振梁长度为0.000 54 m,谐振梁宽度为0.000 012 m,结构厚度为0.000 075 m,附加质量为6.75×10-10kg。假设以上输入参数的不确定度Cov均为0.01。采用随机收敛方法分析不同数量样本下输入输出参数的收敛情况。输入参数的随机收敛分析如图3所示。

图3 输入参数的均值收敛分析
观察图3可发现,当输入参数的样本数量Ns<400时,输入参数的均值波动较大;当Ns=400时,输入参数虽仍有一定的波动,但波动范围均控制在1 %以内。因此,400个样本可以保证输入参数的均值稳定收敛至给定值。输入参数标准差的收敛分析如图4所示,当输入参数样本数仍取400时,仍可保证输入参数的标准差稳定收敛至给定值。

图4 输入参数的标准差收敛分析
由图5(a)容易得到,当样本数量Ns=400时,输出参数的均值很容易地收敛至给定值,该样本数量下完全满足输出参数的稳定分布。输出参数标准差的收敛分析如图5(b)所示,但由于标准差为均值的高阶函数,标准差并未在样本数量为400时呈现收敛态,波动依然很大。为了同时满足其标准差的波动幅度也收敛至较小范围内,将样本数量增大至500,输出参数的标准差可收敛至2 %以内,能够作为代表性样本。根据以上收敛性分析,选取样本个数Ns=500,能够进行后续分析。

图5 输出参数fe的收敛分析
4 输出参数不确定性分析
图6给出了输出参数fe的分布情况,显然,它们已经不满足正态分布,这是由于所构建的模型中含有非线性因素。其中,P5,P25,P50,P75和P95分别为输出参数分布直方图中5%,25%,50%,75%和95%概率位置对应值。由式(17)计算可知,输出参数的分布情况与IQR的大小一致。因此,可以用IQR来量化表征输出参数的不确定性。
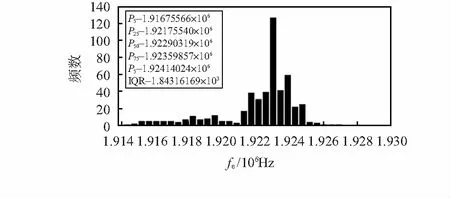
图6 输出参数fe的直方图分布
将多变量问题转化为单变量问题,从而研究被改变的输入参数不确定度对输出参数的影响。将变化的输入参数Cov的范围设定为0.01~0.08,其他输入参数的Cov均保持0.01。观察图7输出参数fe的IQR的影响分布图,当谐振梁长度L的Cov从0.01增大到0.08时,fe的IQR的变化范围最大,表明非线性振动系统下谐振梁固有频率fe受长度L的影响最大。同时,当谐振梁厚度H的Cov从0.01增加到0.08时,fe的IQR也会受到较大影响,输入参数B和ma对fe几乎没有影响。
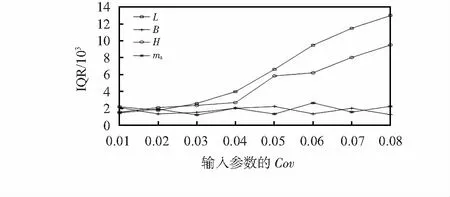
图7 不同输入参数Cov对应的输出参数fe的IQR
基于以上分析,谐振梁的结构参数对不同输出参数产生的影响不同。因此,在MEMS陀螺仪的设计初期,可参考输出参数IQR的影响分布图调整结构参数,以满足不同的工业需求。
5 结 论
本文采用不确定度分析方法,建立了基于随机采样的不确定度分析模型,通过该模型评估了MEMS陀螺仪谐振梁结构尺寸对非线性振动系统下等效固有频率fe的影响大小。分析发现,谐振梁的长度和厚度对等效固有频率fe的影响较大。因此,在MEMS陀螺仪的设计过程中,由于谐振梁的厚度尺寸较小,且对等效固有频率fe的影响较大,加工时需特别注意。鉴于以上建议,本文介绍的结构参数的不稳定性分析方法为敏感结构的设计提供了参考。
