TMR磁传感器磁通调制结构温度稳定性研究
2022-12-10张君盛潘孟春胡佳飞杜青法张欣苗
张君盛,潘孟春,胡佳飞,杜青法,孙 琨,张欣苗
(国防科技大学 智能科学学院,湖南 长沙 410000)
0 引 言
隧道磁电阻(tunnel magnetoresistance,TMR)磁传感器具有高灵敏、低功耗、小型化等显著优势,在生物磁场、目标探测、地磁导航、无损检测等领域均有极大的发展潜力,但1/f噪声极大限制了其低频磁场探测能力[1]。国内外学者提出了多种磁通调制方法用于抑制1/f噪声,但这些方法存在调制效率低、抗干扰能力弱、温度适用范围小等问题,距离实用化还有较大的差距[2~4]。
由于调制结构自身材料特性和应力应变状态与温度紧密相关,基于压电谐振的磁通调制技术存在振幅温漂大、温度稳定性差的问题。目前,主要的压电谐振控制方式包括:基于电流搜索或锁相环的谐振频率控制方法、基于电容式或压电式的幅度控制以及将频率控制和幅度控制相结合的双控制方法[6~8]。这些方式对于稳定调制结构谐振特性起到了一定的作用,但未将温度等环境因素对控制环路本身的影响纳入其中,因此温度稳定性较差,适用范围较小。
为解决上述问题,本文提出了一种相幅双闭环温补控制方法,该方法能够实时跟踪控制谐振频率和振动幅值,并在此基础上根据外界温度信息补偿参考电压,完成控制环路的更新,增强了调制结构的温度稳定性。
1 基于压电谐振的磁通调制结构与原理
基于压电谐振的磁通调制方法能够将1/f噪声降低近2个量级。结构如图1(a)所示,主要由压电驱动谐振主梁、支撑梁、底部带有调制膜的悬臂梁以及硅基基底等部分组成。基于压电谐振的磁通调制原理如图1(b)所示。调制膜在压电结构驱动下周期振动,振动过程中利用其自身的磁力线聚集作用将聚集器气隙内的静磁场或低频磁场调制为高频磁场[5]。
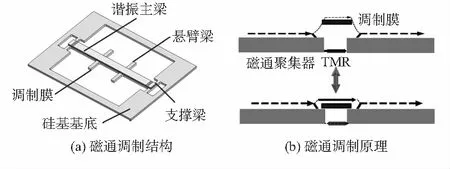
图1 基于压电谐振的磁通调制结构和原理
2 相幅双闭环温补控制原理与方法
相幅双闭环温补控制方法通过基于锁相环和自动增益的双闭环控制环路完成谐振频率和幅度的跟踪控制,通过参考电压温漂补偿模块完成控制信息更新,最终实现变温条件下的调制结构谐振控制。
2.1 基于锁相环和自动增益的双闭环控制方法
调制结构在工作过程中由于环境的干扰、自身的漂移等因素会导致谐振频率及幅度发生变化,因此为保证振动稳定性,要对其谐振频率和幅度进行跟踪控制。磁通调制结构采用压电谐振实现结构驱动,可以采用图2所示的等效电路模型进行描述。其中,C0为静电容,与振动无关;RLC支路中的电阻R1,电感L1及电容C1为与振动相关的结构参数。调制结构达到谐振状态时RLC支路等效为纯电阻。
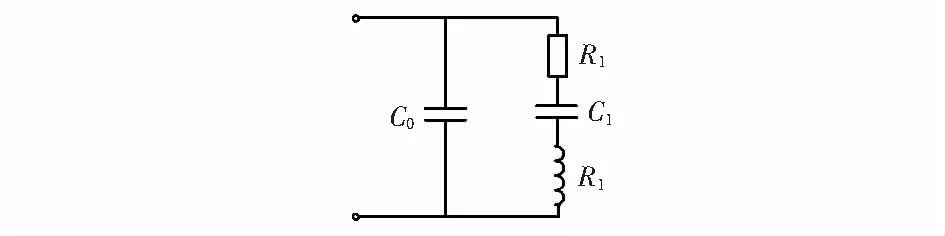
图2 压电振子等效电路
等效电路的电导G及电纳B分别为
(1)
(2)
根据电导及电纳可以得到传递函数的相位θ为
(3)
当达到谐振状态时,RLC支路等效为纯电阻,可求得谐振频率为
(4)
将谐振频率ω0代入到传递函数的相位θ中,可得到串联谐振条件下的相位θ0为
(5)
该相位与频率ω无关,仅与等效电路的参数相关,即谐振状态下系统输出与输入之间的相位差为固定值。调制结构利用逆压电效应实现结构的驱动,利用压电效应实现振动的检测,因此谐振状态下检测信号与激励信号之间的相位差是特定的恒定值,具有锁相环控制的条件。通过调整激励频率使得激励信号与检测信号之间相位差始终与谐振状态下的相位差保持一致,即可实现对谐振频率的跟踪控制。
调制结构的调制效率受振动幅度的直接影响[5],而调制结构自身材料特性、阻尼特性受外界条件影响会发生改变[9],因此在激励满足谐振频率的条件下其振动幅度不一定维持最佳状态,需要在对谐振频率跟踪控制的基础上同时对谐振的振幅状态进行跟踪控制。采用压电层电极图形化的方式设计了检测电极,利用压电效应反映振动的幅度状态,其结构如图3所示。在谐振频率实时跟踪的基础上,采用自动增益控制方法得到最佳振幅状态所对应的检测电压值,将其设为参考电压,只需对参考电压进行跟踪并以此为根据对激励电压幅度进行实时调控,即可完成调制结构振幅跟踪控制。
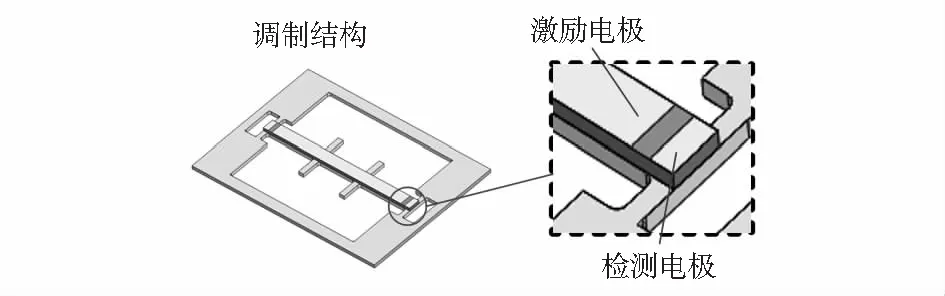
图3 激励电极与检测电极结构位置
综上所述,设计的磁通调制结构双闭环控制环路如图4所示,主要包含两个反馈控制环路:基于锁相环的谐振频率跟踪控制环路和基于自动增益的振幅控制环路。调制结构工作过程中,通过调整激励信号频率和电压幅值,使得检测信号幅值、检测信号与激励信号之间相位差与参考电压、参考相位差分别保持一致,即可完成对调制结构谐振频率和振动幅度的跟踪控制。

图4 基于锁相环和自动增益的双控制原理
2.2 参考电压温漂补偿方法
外界温度条件波动较小的情况下,基于锁相环和自动增益的双闭环控制可以较好地追踪调制结构谐振状态,维持振动的稳定。而当温度条件发生明显的变化时,双闭环控制环路无法继续保持调制结构振幅的稳定。主要原因是,随着环境温度条件的改变,调制结构自身谐振特性发生变化,控制环路中既有的参考电压已无法满足振幅控制要求。因此要建立补偿环节,使得变温过程中调制结构能够根据温度信息对参考电压进行修正,更新双闭环控制环路。
提出的基于最小二乘拟合的参考电压补偿原理如图5所示。首先在0~40 ℃范围内,以2 ℃为步进,选取T(0),T(2),…,T(40)共21个温度点进行实验。在每个温度条件下寻找满足相同最佳振幅条件的参考电压值U(0),U(2),…,U(40),通过最小二乘拟合方式建立参考电压值U关于温度T的函数关系:Um=f(T),从而建立补偿信息数据库。磁传感器运行过程中,其上的温度传感器实时采集环境温度信息,数字信号处理器(digital signal processor,DSP)处理模块会根据此时的温度信息搜索相应参考电压,随后对当前的参考电压进行补偿校正,完成双闭环控制环路的参数更新,使调制结构振幅在不同温度条件下均保持稳定。

图5 变温条件下参考电压补偿原理
3 实验与分析
搭建测试系统进行实验分析,测试系统如图6所示,主要包括:TMR磁传感器、可程式高低温试验箱、电荷耦合器件(charge coupled device,CCD)激光微位移传感器以及基于LabVIEW的一体化测试系统等。
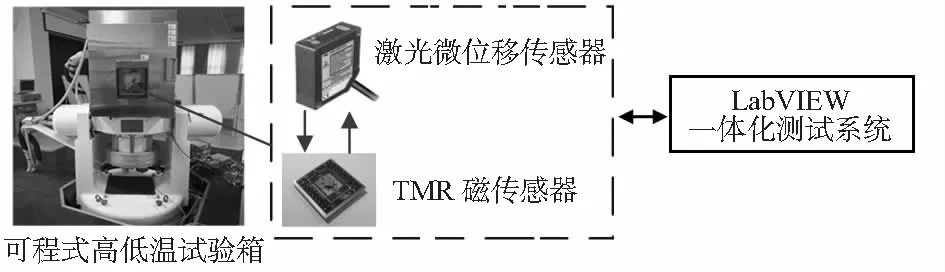
图6 振动稳定性测试系统
在相同初始激励条件下,分无控制和双闭环控制两种条件对调制结构的振幅各进行4 h的实时跟踪检测。利用可程式高低温试验箱维持恒温环境,整个实验过程温度波动不超过0.2 ℃。图7(a)所示,无控制条件下调制结构振幅初始值较小,且随工作时间的延长而持续变化,振幅变化超过1.5 μm;启动双闭环控制后,相同激励条件调制结构初始振幅增大约1 μm,且波动明显减小,4 h内振幅波动小于0.1 μm。振幅初始值提高约5 %,稳定性提升约15倍。说明室温条件下,基于锁相环和自动增益的双闭环控制方法对稳定调制结构的振幅具有明显的效果。
随后设置可程式高低温试验箱以20 min/℃的变化速率自40 ℃至0 ℃变温,利用CCD激光微位移传感器实时检测双闭环控制条件下调制结构振幅波动情况。图7(b)结果显示,调制结构振幅随着温度的改变而呈现出持续的漂移。40 ℃的变温范围内振幅漂移超过1.6 μm,变化率超过0.19 %/℃,说明在变温条件下双闭环控制环路无法继续保持调制结构振幅的稳定,需要在此基础上建立前馈补偿环节。

图7 双闭环控制实验结果
最后搭建测试系统检验控制与补偿相结合的方法对于稳定调制结构在变温条件下振幅的效果。开启双闭环控制和参考电压补偿模块,调试磁传感器使其正常运行。在0~40 ℃内进行升温和降温2次实验验证,温度变化速率为20 min/℃。利用CCD激光微位移传感器实时检测调制结构振幅变化情况,测试系统采集数据并分析得到结果如图8所示。
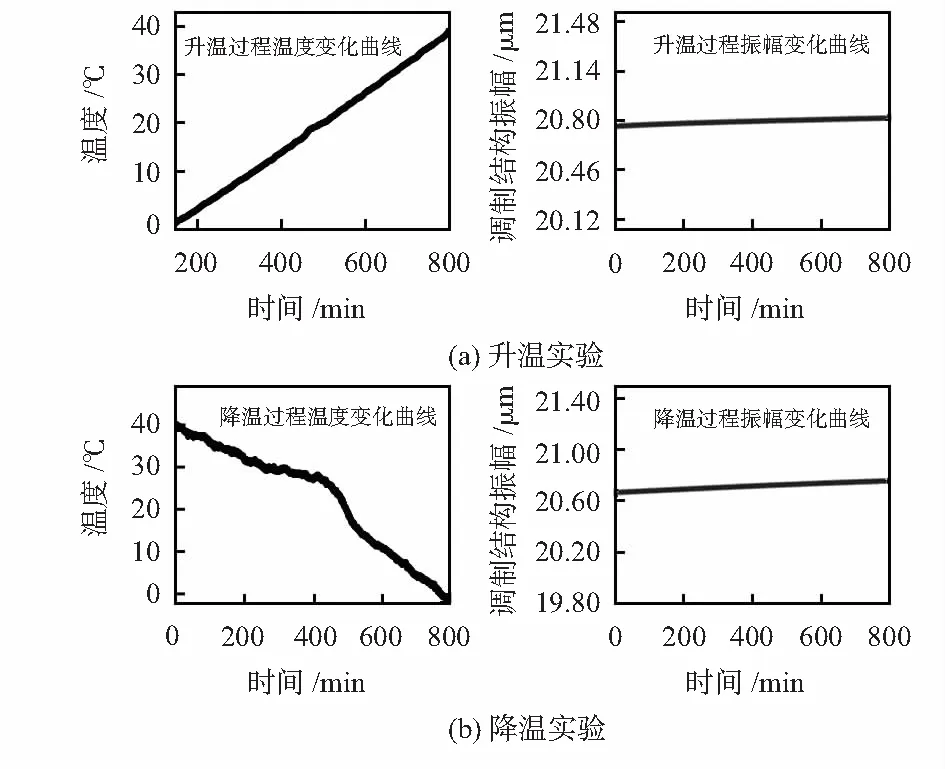
图8 变温条件引入补偿的振幅控制实验结果
实验结果显示,振幅在0 ℃至40 ℃的升温过程中总波动小于0.05 μm,变化率低于0.006 %/℃;在40℃至0℃的降温过程中,由于温度变化不均匀,振幅波动相对较大,但仍小于0.09 μm,变化率约为0.01 %/℃。虽然补偿之后仍存在一定程度的漂移,但相较于补偿之前的0.19 %/℃有了明显改善,调制结构振幅稳定性提升约19倍。
4 结 论
基于压电谐振的磁通调制结构稳定性受温度等环境条件的影响,本文根据目前谐振控制的研究现状,提出了相幅双闭环温补控制方法。通过基于锁相环和自动增益的双闭环控制环路实现对调制结构谐振频率和振幅的跟踪控制,通过基于最小二乘拟合的补偿方法实现对变温条件下参考电压的补偿校正,完成对双控制环路的参数更新。实验结果表明:双闭环控制环路在室温条件下将振幅稳定性提升约15倍。在此基础上,参考电压补偿网络在0 ℃至40 ℃的变温范围内将振幅波动减小至0.01 %/℃,远低于补偿前的0.19 %/℃,稳定性提升约19倍。该方法提升了磁通调制结构的温度稳定性,增大了调制结构的温度适用范围,有利于TMR磁传感器实用化水平的提高。
