基于紫外差分-自适应干扰对消的NO 浓度高精度检测技术
2022-12-06邓勤
邓 勤
(中煤科工集团 重庆研究院有限公司,重庆 400039)
引言
随着经济快速发展,我国汽车保有量保持快速增加。据公安部统计[1],2021 年全国机动车保有量达3.95 亿辆,其中汽车3.02 亿辆,比2020 年增长6.32%;2021 年全国新注册登记机动车3674 万辆,比2020 年增长10.38%。机动车尾气已成为我国主要大气污染源之一。机动车尾气中最重要的污染物之一是氮氧化物(NOx)。据权威发布[2],机动车NOx年排放达595.14 万吨,占全国NOx排放量的33.33%。NOx会对人类健康和环境造成极大危害。因此,机动车尾气NOx的准确快速检测是排放标准制定和环境保护的重点,《在用柴油车排气污染物测量方法及技术要求(遥感检测法)(HJ-845-2017)》规定,需对机动车尾气中CO2、CO、NO及HC 等4 种污染物进行检测,其中NO 的检测精度需达到相对误差≤±10%或绝对误差≤20×10−6。目前,监测NO 的主要技术有金属氧化物传感器[3-4]、非色散红外光谱(NDIR)[5-6]、可调谐二极管激光吸收光谱(TDLAS)[7-8]等。金属氧化物传感器具有价格低廉及快速响应的特点,检测限在×10−6量级[9],然而,其稳定性较差,重复性差,校准周期短,且极易受温度及湿度影响,无法适应于汽车尾气检测的环境;NDIR 具有结构及操作方法简单的特点,检测限可达1.3×10−6[10],然而其极易受水汽影响[11-12],预处理过程较为复杂,容易引入新的误差,且标定周期短,难以实现长期连续监测。TDLAS 具有高精度、高灵敏度的特点,其检测限可达×10−9量级[13-14],但其波长单一,仅适用于单种气体,使得尾气监测成本增加。紫外差分光学吸收光谱(UV-DOAS)是目前最常用的NO 监测技术,具有高可靠性、高精度、强抗干扰的性能[15-19]。
然而,利用UV-DOAS 对尾气中NO 进行测量也遇到了一些挑战,在已有研究中,UV-DOAS 方法对NO 的测量上限一般为100×10−6~1 000×10−6,测量相对误差为±5%~±15%[20-22],而机动车排放NO浓度通常高达3 000×10−6。汽车尾气在排放NO 的同时,还会排放SO2。NO 在紫外波段的吸收峰位于200 nm~226 nm,与SO2的吸收峰波段完全重合,导致无法直接使用透射光谱对NO 进行浓度反演。针对以上问题,本文建立了浓度为0~3 000×10−6的NO 标准曲线库,并将基于递归最小二乘法(RLS)的干扰对消技术引入混合气体分离中,利用该技术可快速将NO 光谱特征完全从混合气体光谱特征中分离出来,最后结合宽量程标准曲线库,利用最小二乘法对分离出的NO 光谱特征进行浓度反演,从而实现NO 的高精度测量。该方法具有时效性强、准确性高与稳定性好的特点,同时也可用于监测其他气体混合物。
1 测量原理
1.1 朗伯比尔定律

一束光在通过气体介质时,特定波段光强度会发生衰减,衰减量与气体浓度和光路直接相关,遵循朗伯-比尔定律:式中:I0(λ)为 入射光强;I′(λ) 为 出射光强;L为通过气体的光程; σi(λ)为 第i种气体的吸收截面;Ci为第i种气 体的 浓 度; εM(λ)为米 氏散 射 消光 系数;εR(λ)为瑞利散射消光系数。
由瑞利散射和米氏散射引起的光强衰减随波长变化而缓慢变化,由气体吸收引起的光强衰减随波长变化而快速变化[23],因此(1)式可写为
式中:Hi(λ)为 第i种气体在波长 λ处的差分光学厚度。
则第i种气体浓度可表示为

由(5)式可知,对于测量特定波段内吸收谱无交叠的气体,可直接通过(5)式求解得到,但若要测量特定波段内吸收谱与其他气体有交叠的某种气体浓度,则必须将该种气体的DOD 从混合光谱DOD 中精确分离出来,分离精度越高,则测量精度越高。
1.2 自适应干扰对消
1.2.1 自适应干扰对消系统
自适应干扰对消技术自问世以来,已广泛地应用于各类问题,如长途电话线中去回声、医学中心电图去噪、雷达抗干扰等[24-25]。其对消原理如图1所示。对消系统有2 路输入信号,一路是期望信号d,它是有用信号s和噪声信号n0的混合信号;另一路是参考信号x,其特点为与有用信号s不相关,但与噪声信号n0相关。参考信号x被送入自适应滤波器作为输入,滤波器输出信号y,误差信号e=d−y。

图1 自适应干扰对消Fig. 1 Schematic of adaptive interference cancellation
自适应线性组合器的M个权系数构成一个权系数矢量,用w表示,则自适应滤波器输出y可以表示为y=xTw=wT x,将e=d−y公式两边平方得到:
显然,E(s2)与E((n0−y)2)无关,故当调节滤波器参数使E(e2)最 小时,e→s,此时,系统噪声得到有效抑制,系统输出信号e即为有用信号s的最佳估值。
1.2.2 递归最小二乘法(RLS)
自适应滤波器一般采用随机速梯度下降法(LMS)作为滤波算法[26-27],然而LMS 收敛速度慢,不利于汽车尾气监测过程实时数据的显示。相较于LMS,RLS 算法具有计算精度稳、收敛速度快(比LMS 快一个数量级)、定性好的优点[28-29]。因此,本文采用RLS 算法来实现混合气体DOD 曲线的自适应滤波。
RLS 算法将加权平方误差作为系统损失函数,参数优化准则如(8)式所示。


1.3 最小二乘法λ

2 实验系统
机动车尾气NO 实时测量实验系统主要由光源、气室、光谱仪、光纤、标准气体、配气仪组成,其系统框图如图2 所示,实验系统实物图如图3 所示。

图2 实验系统框图Fig. 2 Block diagram of experimental system
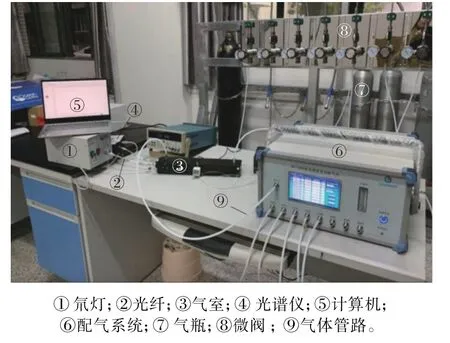
图3 实验系统实物图Fig. 3 Physical drawing of experimental system
系统使用在紫外范围内具有宽发射光谱的高压氘灯(ocean optical D2000)作为光源,光通过入射光纤传输到光程为9 m 的气室中,在气室中完成传输的光束由石英透镜聚焦到出射光纤中,最后,光束被耦合到光谱仪(ocean optics Maya2000)中。光谱仪分辨率为 0.1 nm,波长范围为190 nm~415 nm。
购置纯N2、浓度为100×10−6的SO2和浓度为4 000×10−6的NO 标准气体,通过配气仪向气室输送所需浓度的气体,配气仪输出气体流速保持在1 L/min,整个实验过程中,气室中压力保持为1 个大气压,温度保持为25 ℃。
3 实验方法、结果与讨论
NO、SO2及混合气体的差分光学密度如图4所示。

图4 NO、SO2 及混合气体的差分光学厚度图Fig. 4 Diagram of DOD of NO, SO2 and mixed gas
显然,在200 nm~230 nm 波长段,NO 和SO2的吸收光谱发生重叠,很难直接计算出NO 的浓度,本文将1.2 节中提到的自适应干扰对消技术引入混合气体光谱分离中,通过筛选处理得到的特定DOD 曲线作为参考信号,将混合气体DOD 曲线作为输入信号,利用RLS 算法进行参考信号的自适应调整,最终当算法收敛时,参考信号逼近混合气体中SO2的DOD 值,系统输出信号即为NO信号DOD 曲线的最佳估值,从而实现混合气体中NO 的有效分离提取。
要想得到高精度的自适应干扰滤波,参考信号的选择尤为重要,优异的参考信号可缩短自适应迭代时间,并使我们求得的有用信号误差更小。
我们利用配气系统配置浓度间隔为10×10−6,最小浓度为10×10−6,最大浓度为80×10−6的8 组气体,通过实验系统求得其对应的DOD 值,将8 条DOD 曲线按照表1 比例进行叠加,得到3 条参考DOD曲线,如图5 所示。

表1 参考曲线中不同浓度气体DOD 占比Table 1 DOD ratio of gas at different concentrations in reference curves
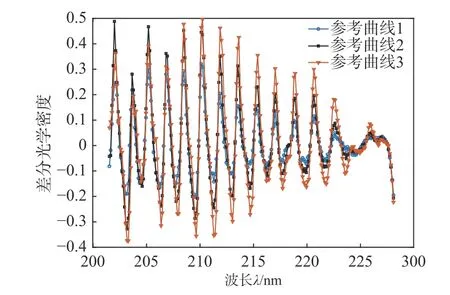
图5 3 条参考曲线Fig. 5 Three reference curves
为验证自适应对消滤波算法的有效性并筛选出合适的参考曲线,本文设计了2 组实验。
第1 组是浓度为200×10−6的NO 分别混合浓度 为10×10−6、20×10−6、30×10−6、40×10−6、50×10−6、60×10−6、70×10−6、80×10−6的SO2,分别采用3 条参考曲线,计算自适应滤波后的NO 差分光学厚度曲线与标准200×10−6差分光学厚度曲线的相关系数,结果如表2 所示。

表2 第1 组实验NO 差分光学厚度计算值与标准值相关系数Table 2 Correlation coefficient between calculated value and standard value of NO differential optical thickness in the first group of experiments
第1 组实验结果表明,利用参考曲线3 滤波计算后的NO 差分光学厚度值与标准差分光学厚度值之间的相关系数均大于0.99,即参考曲线3 作为参考信号能较好地逼近混合气体中的SO2信号,从而求得准确度更高的NO 差分光学厚度。
第2 组实验为SO2和NO 浓度同时变化,利用参考曲线3 做NO 浓度反演,浓度配比及实验结果如表3、表4、表5 所示。

表3 第2 组实验NO 计算结果Table 3 Calculation results of NO in the second group of experiments

表4 第2 组实验NO 计算结果Table 4 Calculation results of NO in the second group of experiments

表5 第2 组实验NO 计算结果Table 5 Calculation results of NO in the second group of experiments
从表3、表4、表5 可看出,利用本文方法进行混合气体中NO 浓度反演,最大相对误差为8.28%,当NO 浓度在300×10−6~3 000×10−6之间时,相对误差绝对值小于5%。第2 组实验表明,在100×10−6~3 000×10−6浓度范围内,SO2和NO 同时变化时,该方法仍能够准确地分离出NO 的差分光学厚度曲线,从而准确地反演出NO 浓度。
4 结论
本文提出一种机动车尾气中NO 快速检测方法,并构建相应的测试系统。与国内外相关仪器相比,本文构建的测量系统不需选取额外的波段对干扰气体浓度进行单独反演,不需利用高精度配气系统单独建立干扰气体的标准DOD 曲线比对库[21-22],采用自适应的方式对混合气体中各个组分气体光谱特征进行高精度分离,运算速度快,运算量较小,对除气体外其他噪声的适应性也很强,且可拓展为检测混合气体中单组分气体的普适性方法,对大气环境多组分气体在线监测发展具有一定的参考意义。然而,本方法也有一定的局限性,机动车尾气排放的NO 在一定概率下会转换为NO2,虽然NO2在200 nm~226 nm 吸收峰较弱,但其DOD 曲线与SO2一样呈现高频振荡趋势,对参考曲线在自适应分离过程中的干扰难以消除,会令测量精度降低,下一步需要对此开展相关研究。
