基于Bouc-Wen单元的半主动阻尼拉杆的集总参数模型研究
2022-11-21王道勇李学军邓之润
王道勇,李学军,邓之润
(佛山科学技术学院机电工程与自动化学院,广东 佛山 528225)
1 引言
液压减振器作为一种典型的液压减振元件,广泛应用在汽车领域,具有减振优良等特点,在这里,用于减小发动机启停和汽车原地换挡时动力总成振动的半主动阻尼拉杆类似于一款半主动液压减振器。液压减振器的外特性一般采用不同振幅和频率的力-位移和力-速度曲线表征。为描述液压减振器的外特性,国内外学者做了诸多研究工作[1-5]。文献[1-2]建立了液压减振器等效参数模型,其阻尼力计算值在低频段与实验结果吻合良好。文献[3]建立了单筒充气式液压减振器的集总参数模型,通过有限元计算方法获得了关键部件的物理参数,采用集总参数模型和分布参数模型相结合的方法,获得了液压减振器的外特性,其计算值与实验结果一致。文献[4]建立了液压减振器的物理参数模型,对相应参数进行了识别,研究结果表明,在不同振幅和频率下,计算值和实验结果吻合良好。文献[5]对液压减振器在不同条件下的外特性进行了研究,但未考虑油液的非线性粘性特征。
由于油液具有较强的非线性粘性特征,使得半主动阻尼拉杆工作时的外特性(力-速度关系)表现较强的非线性迟滞特性。因此,在这里的半主动阻尼拉杆的集总参数模型中,引入对称的非线性迟滞Bouc-Wen模型,它包含了非线性阻尼和非线性刚度,其复原和压缩过程的阻尼力大小相等,方向相反。因此,可以真实的表现半主动阻尼拉杆的迟滞特性。
目前,以微分形式表示的Bouc-Wen 迟滞模型被广泛应用在工程结构的动态特性表达方面[6-9],并借助数学软件如Simulink 进行计算[10-11],而对其本构方程的简化应用分析较少。这里首先建立了半主动阻尼拉杆的集总参数模型,在该模型中引入包含非线性阻尼和非线性刚度特性的Bouc-Wen 单元。在文献[12-13]工作的基础上,通过对Bouc-Wen 模型线性处理,将模型进一步简化。其次通过实验和理论计算相结合的方法对模型中各参数进行有效识别。最后分别试验测试和理论计算了不同振幅和频率下的阻尼力,并将其计算值和实验结果进行对比。
2 半主动阻尼拉杆集总参数建模研究
半主动阻尼拉杆的电磁阀与车载电源相连,通过汽车ECU控制电磁阀的开或关来实现流道切换,以达到不同阻尼效果的液压减振元件,其结构与液压减振器类似。半主动阻尼拉杆主要是通过油液在运动活塞5上的阻尼孔流动,产生较大的阻尼来衰减冲击与振动。
运动活塞在往复运动的过程中,为防止出现空程畸变,在氮气腔2中一般充入(0.5~0.8)MPa的氮气。当阻尼杆8伸长时,浮动活塞3向右运动。当阻尼杆压缩时,浮动活塞向左运动。在半主动阻尼拉杆工作过程中,浮动活塞主要提供体积补偿的作用。半主动阻尼拉杆结构,如图1所示。

图1 半主动阻尼拉杆结构Fig.1 The Structure of the Semi-Active HDS
2.1 半主动阻尼拉杆集总参数模型
为推导半主动阻尼拉杆的阻尼力,这里主要考虑油液在活塞阻尼孔流动的情况,即将半主动阻尼拉杆模型简化,如图2所示。复原腔、压缩腔和高压氮气腔的压强分别P1、P2和P3,其长度分别为l1、l2和l3。A1和A2为运动活塞分别在压缩腔和复原腔的面积。
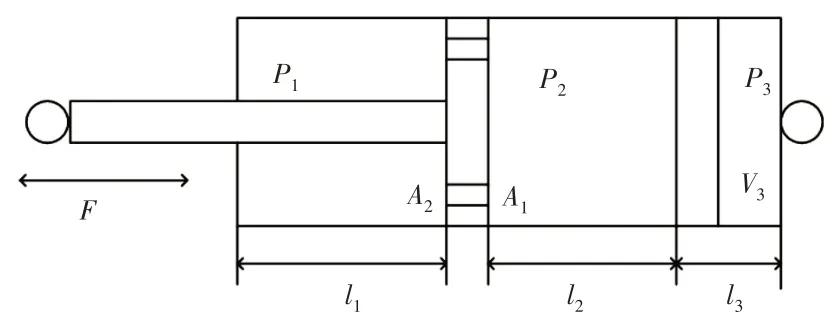
图2 半主动阻尼拉杆简化图Fig.2 Simplified Diagram of Semi-Active HDS
半主动阻尼拉杆压缩时阻尼力可以表示为:

式中:τ—缸筒壁和活塞表面缝隙中的油液在流动时产生的剪切应力;As—与油液接触的活塞表面面积。
油液的剪切应力τ与复原腔和压缩腔的压差Δp、油液流动速度v的关系可以表示为:

将式(3)进一步简化,阻尼力可以表示为:

当活塞上有n个阻尼孔时,则活塞孔节流压力与流量的线性关系可表示为:

式中:Lhe—等效活塞孔的长度;
μt—油液的动力粘度;
Q—油液流经阻尼孔的流量;
d—阻尼孔孔径。
为表征油液的非线性和粘性效应,这里将(A1-Arod)Δp和τ'As的非线性关系用Bouc-Wen 单元表征,建立基于Boun-Wen 单元的半主动阻尼拉杆集总参数模型,如图3所示。该模型主要由弹性元件k、阻尼元件c和非线性迟滞模型Boun-Wen 单元并联组成。
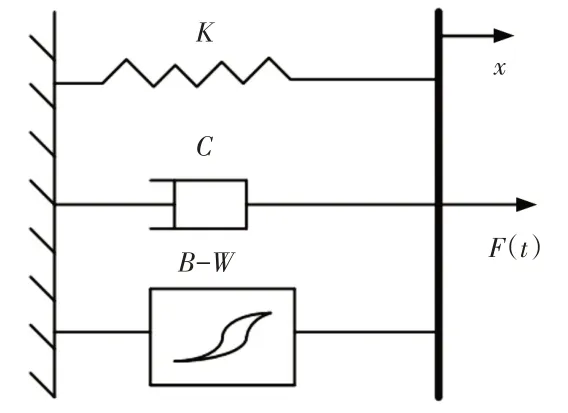
图3 半主动阻尼拉杆集总参数模型Fig.3 Lumped Parameter Model of Semi-Active HDS
半主动阻尼拉杆的阻尼力可表示为:

γ与x的关系,如图4所示。
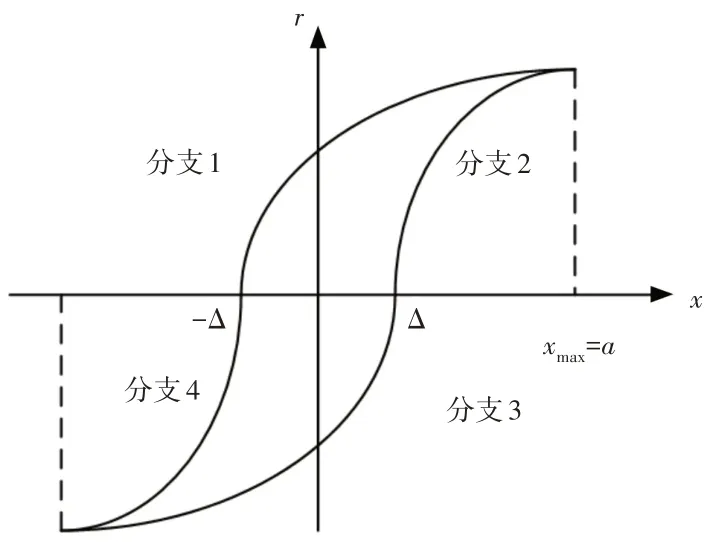
图4 Bou-Wen滞回环Fig.4 Bou-Wen Hysteresis Loop
上式中A类似于系统的线性刚度,在其它参数不变的情况下,当A增加,系统的刚度增加,系统的变形减小,耗能减小。A对Bouc-Wen形状影响较小,但对其斜率和幅值影响显著:当A<10时,随着A的增大,滞回环斜率和幅值增加;当A>10时,滞回环斜率和幅值与A不再成正比关系。
参数n影响迟滞回线的光滑度,即影响从弹性区域过渡到塑性区域的平顺性即迟滞环的光滑程度,对迟滞环和迟滞恢复力没有显著影响。当n较小时,曲线比较光滑;当n>2后对迟滞回线的光滑程度的影响基本可以忽略;当n→∞时,光滑迟滞回线转化为双线性迟滞回线。综上所述,参数n可看成为不敏感因数,在这里设定n=2[14]。
参数γ、β对系统的非线性刚度和非线性阻尼特性影响如下:
(1)γ>0,β>0时,系统表现为软弹簧特性,γ>β时,即比值比较大时,滞回环曲线包含的面积较大,系统耗能大于γ<β时的系统耗能,γ不可为负,否则系统将不稳定。
(2)β>0,γ<0且当<1时,系统表现为硬弹簧特性。
2.2 模型简化分析

式(7)写成分段函数为:
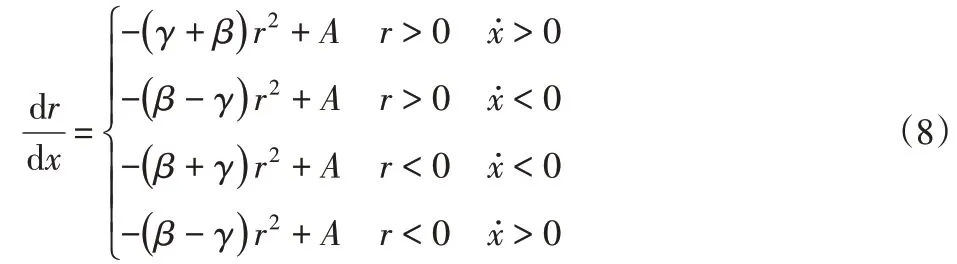
将上式积分,滞回环的四个分支,如式(9)~式(12)所示:
分支1:

分支2:

分支3:

分支4:

与液阻悬置类似[15],半主动阻尼拉杆可看成具有刚度和阻尼的元件,因此可用系统等效存储动刚度和系统等效阻尼表示原集总参数模型的阻尼力,即有:

为简化问题分析,令β=γ。当外界激励振幅a≥0.1mm 时,a≈Δ[13]。
当a>>0时:
故有:
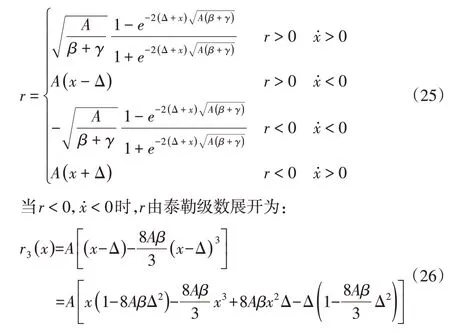
当a→0时,迟滞环包含的面积变为一条直线。由泰勒级数展开可得:


所以:

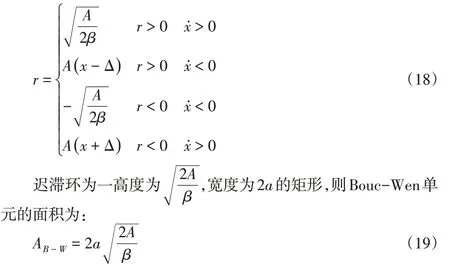
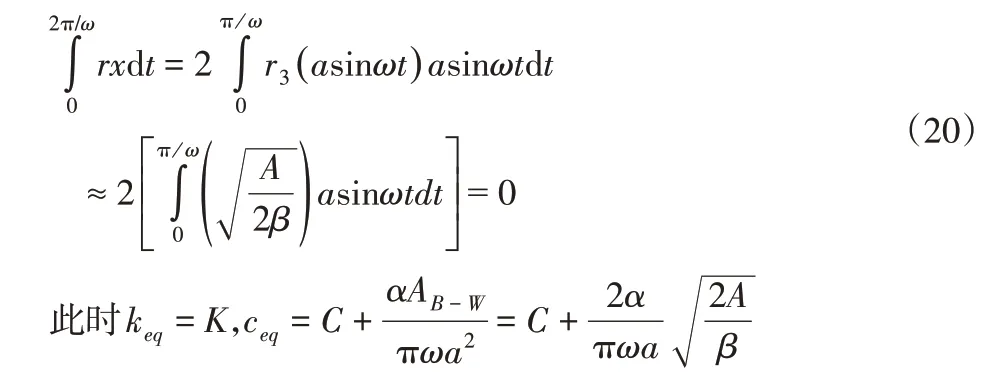
当振幅a一定时,r可以表示为:
因此等效刚度和等效阻尼系数可以表示为:
由上述推导可得等效刚度和等效阻尼系数为:
3 参数识别
由式(27)可知,半主动阻尼拉杆在一定振幅和频率激励下,其阻尼力可写为:

根据表1中半主动阻尼拉杆的相关参数可计算出系统存储动刚度中弹性元件K的值为:


表1 阻尼拉杆特性参数Tab.1 The CharacterIstic Parameters of the HDS
当阻尼杆往复运动速度较小时,复原腔和压缩腔的压强差Δp为0,活塞和缸筒的阻尼力可以表示为:

通过如图5所示MTS831台架,测得半主动阻尼拉杆运动速度为500mm/min时,半主动阻尼拉杆的阻尼力,如图6所示。
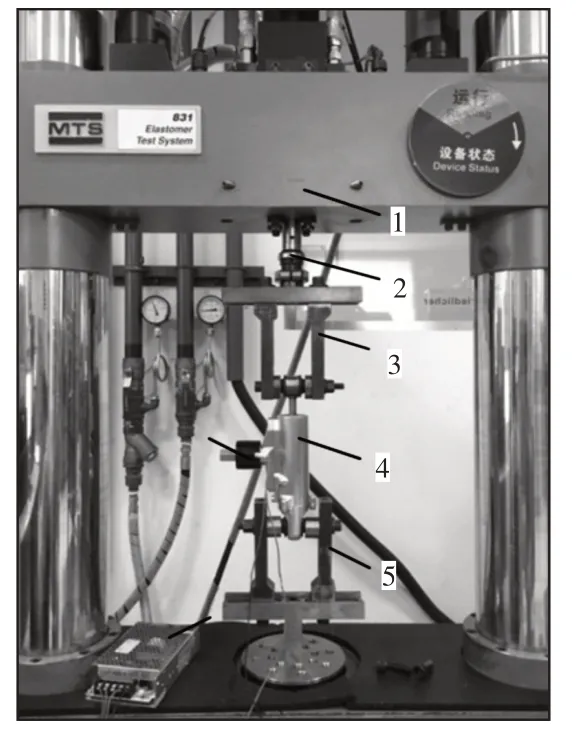
图5 半主动阻尼拉杆动态特性实验Fig.5 Semi-Active HDS Dynamic Characteristic Experiment
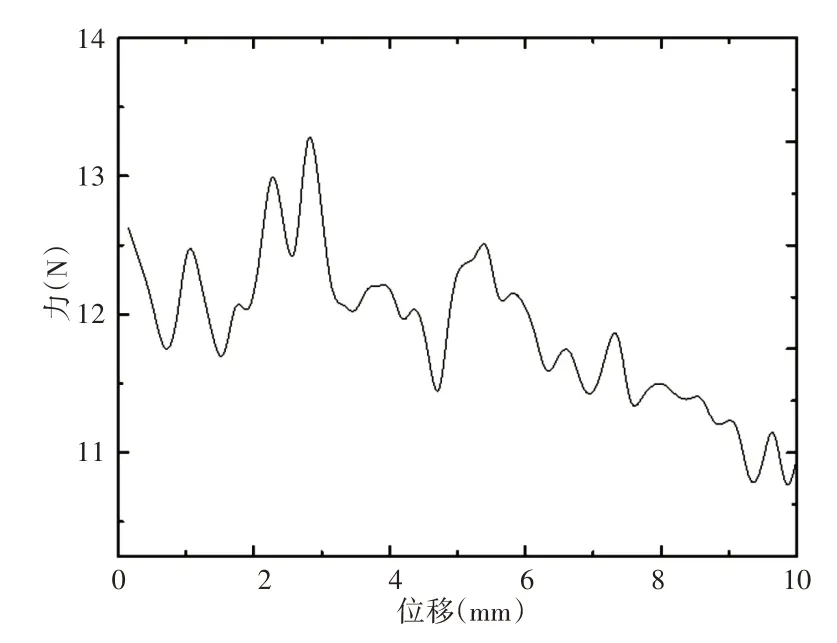
图6 半主动阻尼拉杆阻尼力Fig.6 Semi-Active HDS Damping Force
根据图6 中的摩擦力和表1 中的相关数据,识别出c为1.44Ns/mm。参数α,β和A一般可以通过遗传算法或最小二乘法来识别。当参量太多时,拟合精度降低,因此,为方便问题的分析,将式(29)中的Aα和Aβ看成两个未知数处理。
通过MTS831 试验台架对半主动阻尼拉杆在振幅分别为1mm和2mm,频率为(1~20)Hz对应的存储动刚度和阻尼系数进行了测试,测试结果,如图7、图8所示。
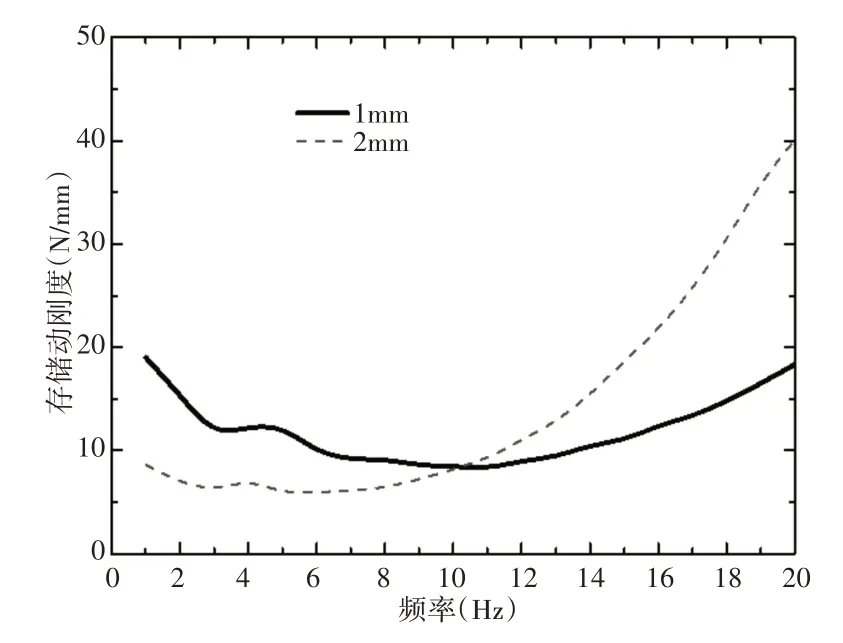
图7 存储动刚度Fig.7 Storage Dynamic Stiffness
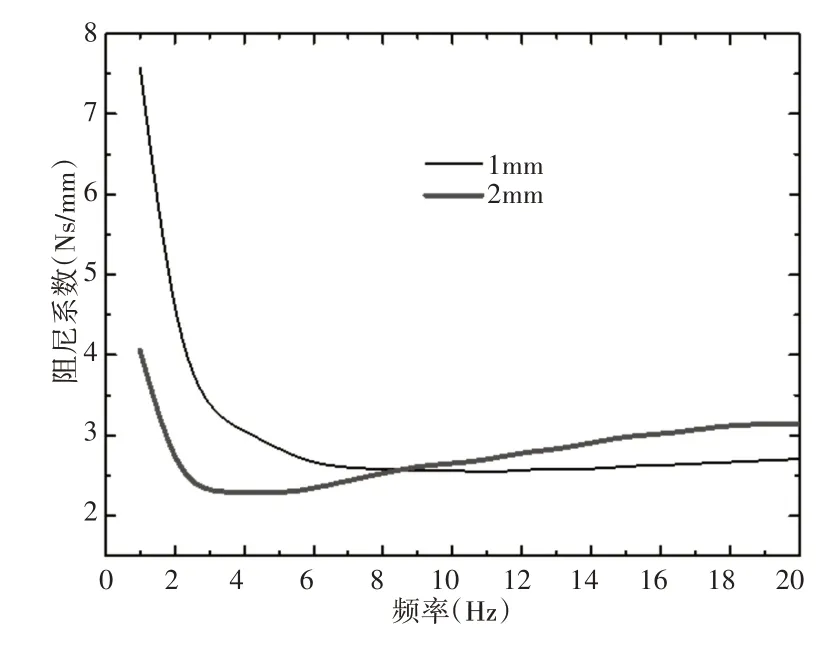
图8 阻尼系数Fig.8 Damping Coefficient
通过计算分析,半主动阻尼拉杆振幅分别为1mm 和2mm时,Aα和Aβ,如图9、图10 所示。通过对图9、图10 分析可知,当激励振幅为1mm 和2mm 时,Aα的值为负数,Aβ的值为正数。Aα随着振幅增加,绝对值变大,而Aβ随着振幅增加,其值呈减小趋势。
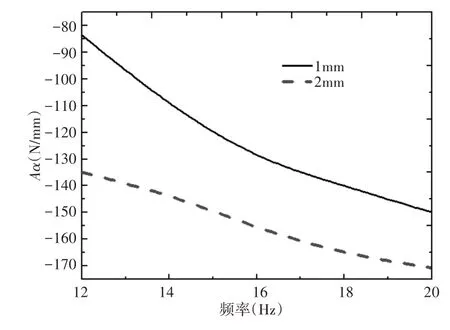
图9 Aα识别结果Fig.9 The Identified Result of Aα
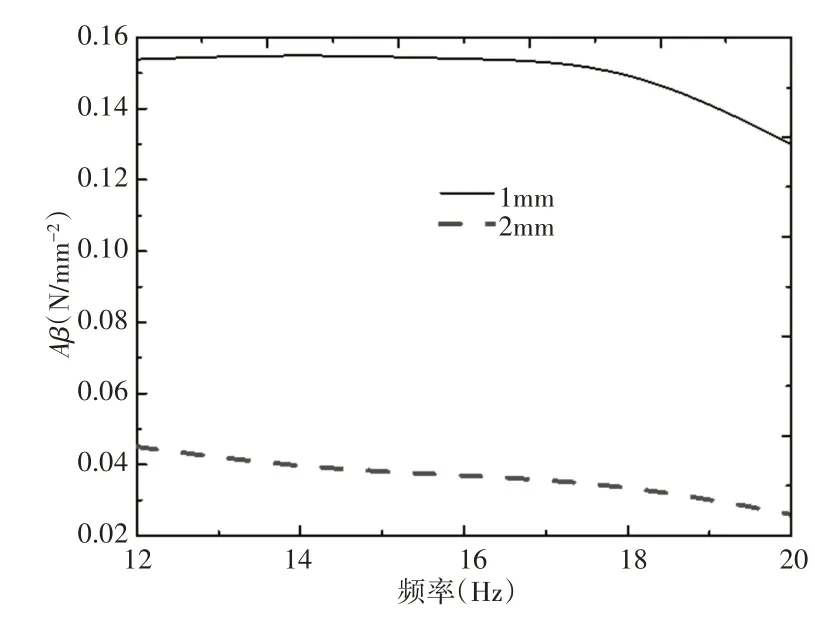
图10 Aβ识别结果Fig.10 The Identified Result of Aβ
4 实验验证
为验证这里模型简化及参数识别的合理性,将不同振幅下的力-速度的计算值与实验结果对比,如图11、图12所示。通过以上分析可以看出,各振幅对应的阻尼力与速度的计算值与实验值吻合良好,可以较好的反映半主动阻尼拉杆在各振幅下的力与速度关系,揭示这里Boun-Wen 模型简化及参数识别方法合理。

图11 振幅1mmFig.11 With Amplitude 1mm
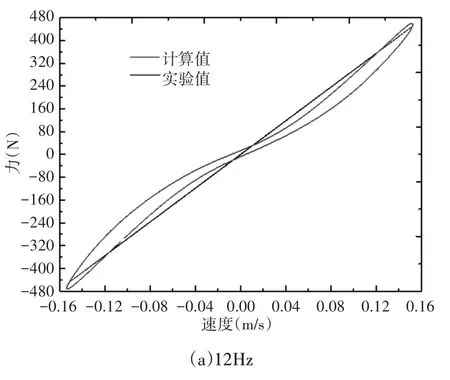

图12 振幅2mmFig.12 Amplitude 2mm
5 结论
(1)建立了包含Bouc-Wen单元的半主动阻尼拉杆集总参数模型,通过对Bouc-Wen非线性迟滞模型采用线性处理,提出了分段线性的半主动阻尼拉杆阻尼力模型。(2)采用试验和理论计算相结合的方法对模型中的相关参数进行识别,揭示了各参数的变化规律。(3)对半主动阻尼拉杆在不同振幅下的阻尼力进行试验和理论计算,结果一致。说明了这里提出的基于Bouc-Wen单元的集总参数模型线性处理方法及参数识别方法合理。