3-RSS/S并联机构的运动/力传递性能研究
2022-11-21索若淇
索若淇,李 辉,2
(1.吕梁学院矿业工程系,山西 吕梁 033001;2.中北大学机械工程学院,山西 太原 030051)
1 引言
少自由度并联机构因其承载力大、速度快、惯量小、相比六自由度并联机构控制简单等特点,被广泛应用于各个行业领域[1-5]。
3-RSS/S机构是一种常见的少自由度并联机构,具有3个转动自由度,通过对其进行运动学、静力学和动力学的研究,证明该机构适合用于康复训练[6-8]。但目前还没有文献对3-RSS/S并联机构的性能进行研究,无法评价机构在工作时的性能表现,无法评估其工作效率,也有碍于之后对机构进行尺度优化工作,因此有必要对该机构进行性能研究。
在进行并联机构的性能研究时,通常使用雅克比矩阵条件数的倒数局部条件数指标来评价并联机构的运动性能[9-11]。但该方法由于雅克比矩阵元素量纲的不一致,会导致局部条件数指标具有不一致性[12]。
此外,文献[13]基于旋量理论,通过瞬时功率的概念提出的运动/力性能分析方法,该方法定义了局部传递指标和优质传递工作空间用于评价机构性能。文献[14]采用能效系数法定义和求解机构传递性能相关的评价指标。文献[15-16]对用于外科手术领域的2PURR-PUR机构和包含4R平行四边形闭环支链远中心运动的并联机构进行了性能分析,通过定义局部传递指标和全局传递指标表明机构在工作空间内传递性能良好,能够满足外科手术的任务要求。
采用运动/力性能传递指标研究3-RSS/S并联机构的性能表现,使用旋量理论建立其数学模型,通过闭环矢量法得出其运动学逆解方程,在此基础上推导出机构的运动/力输入、输出传递性能指标和局部传递指标,并给出两组数值算例从机构性能方面证明了3-RSS/S适用于康复训练,为之后进行尺度优化奠定基础。
2 机构的数学模型
3-RSS/S并联机构的初始位姿,如图1所示。图中:Ai(i=1,2,3)、Bi、Ci—第i条支链的R、S和S副;C4—约束支链约束动平台的S副;li1—第i条支链的杆AiBi的长度;li2—第i条支链的杆BiCi的长度;l4—约束支链OC4的长度;e1、e2—定、动平台外接圆的半径;Ai—定平台外接圆上(A1、A2和A3轴线的夹角分别为120°);Ci—动平台外接圆上;θi—第i条支链R副的转角;O-XYZ—固定在定平台外接圆圆心的定坐标系;o-xyz—固定在动平台外接圆圆心的动坐标系,在初始位姿下,定、动坐标系的轴线方向相同。

图1 3-RSS/S并联机构Fig.1 3-RSS/S Parallel Mechanism
根据图1所示,建立3-RSS/S并联机构的旋量模型。支链1的许动运动旋量系在坐标系O-XYZ中表示为:
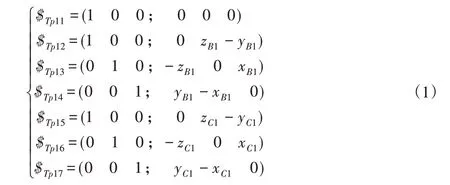
式中:xB1,yB1,zB1—B1的x,y,z坐标;xC1,yC1,zC1—C1的x,y,z坐标;其值不影响反旋量的求解。
支链具有7个许动运动旋量,但只有6个线性无关旋量,是一个具有6自由度的支链,其中与这6个旋量线性相关的旋量表示杆B1C1绕两S副轴线旋转的局部自由度,不影响机构整体的性能。故支链1的许动运动旋量不存在反旋量,即不存在约束力旋量。
支链2的许动运动旋量系为:
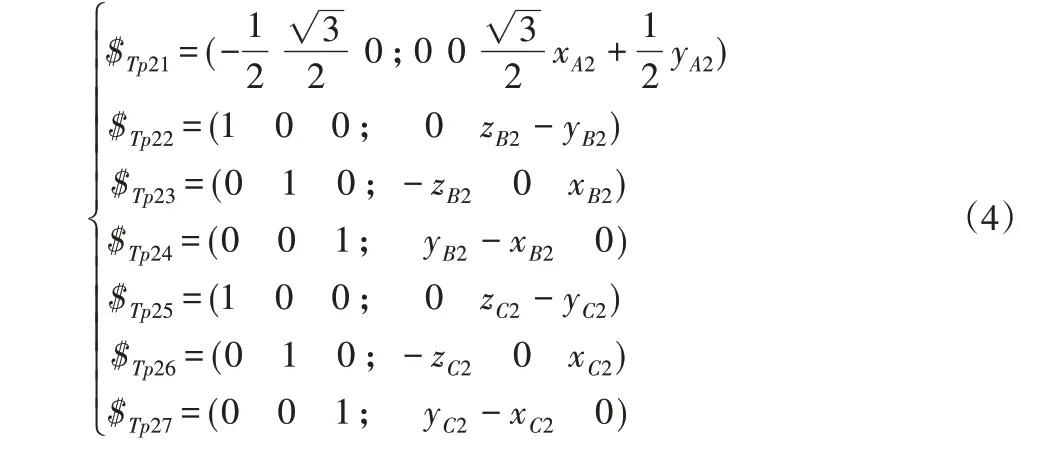
式中:xA2,yA2,zA2—A2的x,y,z坐标;xB2,yB2,zB2—B2的x,y,z坐标;xC2,yC2,zC2—C2的x,y,z坐标;其值不影响反旋量的求解。
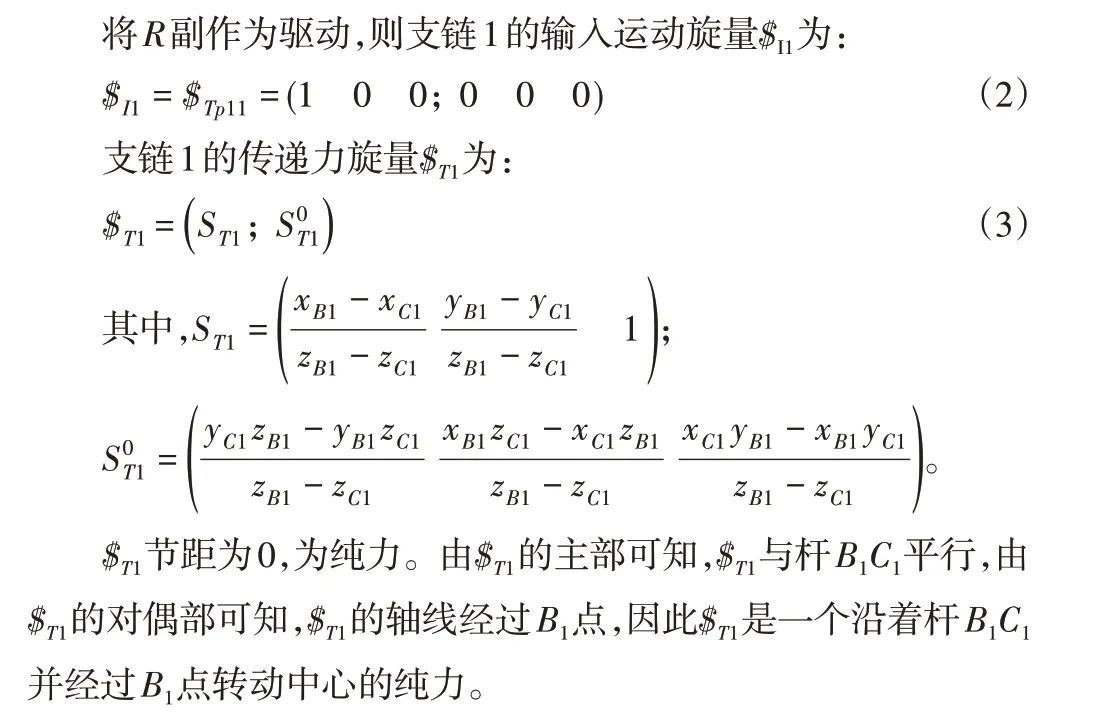
同样,支链2是一个具有6自由度的支链,无约束力旋量。将R副作为驱动,则支链2的输入运动旋量为:
同理可得,支链3的许动运动旋量系为:
式中:xA3,yA3,zA3—A3的x,y,z坐标;xB3,yB3,zB3—B3的x,y,z坐标;xC3,yC3,zC3—C3的x,y,z坐标;其值不影响反旋量的求解。
约束支链OC4的许动运动旋量系为:

约束支链的约束力旋量系为:
3 3-RSS/S机构的运动学逆解
通过机构的运动学逆解能够得到动平台在各个位姿下各支链的输入角,从而能够得到机构各个关节的坐标,这是求解机构运动/力传递性能指标的基础。
使用闭环矢量法求解3-RSS/S的运动学逆解。如图1所示,定义支链的R副Ai在定坐标系中的坐标为列向量Ai,由几何关系可得Ai为:
各支链与动平台相连的S副在定平台中的坐标为列向量Ci,由于动平台只能绕o点沿x、y、z轴转动,转角分别定义为α、β、γ,由几何关系可得Ci为:
式中:R(α,β,γ)—动平台的旋转矩阵,表示为:

式中:c—cos的缩写;
s—sin的缩写。
各支链中,两连杆相连的S副在定平台中的坐标为列向量Bi,由几何关系可得Bi为:

由于杆li2的长度不变,可得:

当给定动平台位姿(给定转角α,β,γ的值),式(16)为一个三元方程组,共有三个方程,且每个方程中只有一个未知量θi,因此式(16)是可解的,即各支链的输入角θ1,θ2,θ3可解,并且可单独求解某一输入角θi。
通过式(16)得到各支链的输入角,即得到机构各个关节的坐标。求解机构运动学逆解时,结果通常不唯一,动平台在某一位姿下存在多组解,即机构存在多种构型。在离散的多个位姿下,如何确定每个位姿下每组解属于何种构型,还需确定机构构型的判别方法。采用MATLAB的fsolve函数求解机构的运动学逆解,设定一组机构输入角的初值,使函数从这组初值附近迭代,通过数值算法确定该种构型下的唯一的逆解。
4 局部传递指标的求解
运动/力传递性能可从输出和输出两个方面进行研究,即输入传递指标和输出传递指标。
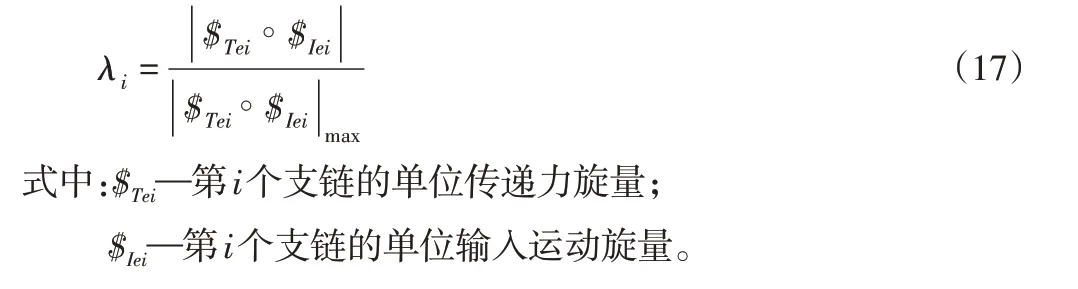
输入传递指标表示传递力对输入关节运动的传递效率,基于能效系数法将其定义为:
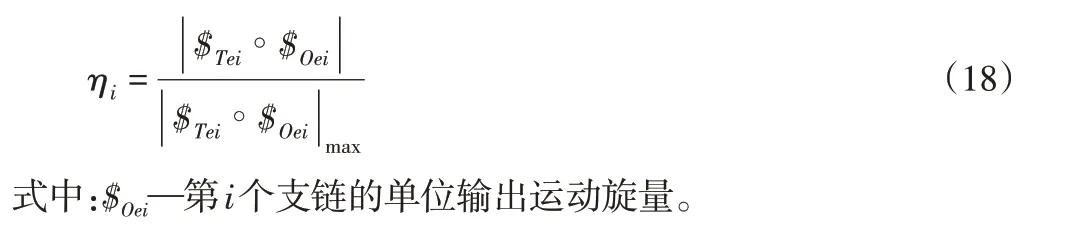
输出传递指标表示传递力对机构输出运动作功的功率,基于能效系数法将其定义为:
取输入传递指标和输出传递指标的最小值作为机构的局部传递指标,定义为:

当机构的动平台在某一可达区域内的ρ>0.7时,认为该区域为机构的优质工作空间。
4.1 机构的输入传递指标
以支链1为例研究RSS支链的运动/力输入传递指标,如图2所示。图中:f1—沿杆B1C1的一个单位力向量;v1—B1点S副中心的单位速度向量;φ1—f1与v1的夹角;ω1—R副转动的单位角速度。
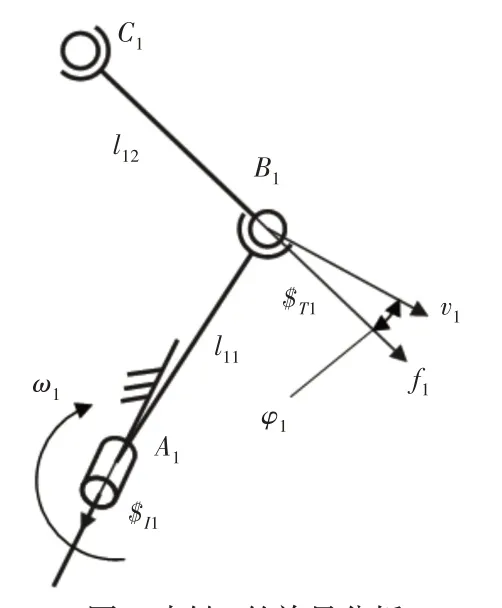
图2 支链1的旋量分析Fig.2 Analysis of the Screw of Limb 1
式中:OB1—B1点在定坐标系中的坐标。
将式(20)和式(21)带入式(17),则支链1 的输入传递指标λ1为:
故,式(18)可化简为:

由式(24)可得,RSS 支链的输入传递指标只与支链的传递力向量和Bi点S副中心速度向量的夹角φ1有关,即支链的逆压力角。同理可得支链2和支链3的输入传递指标λ2和λ3为:

式中:φ2—支链2传递力旋量与B2点S副中心速度向量的夹角;
φ3—支链3传递力旋量与B3点S副中心速度向量的夹角。
4.2 机构的输出传递指标
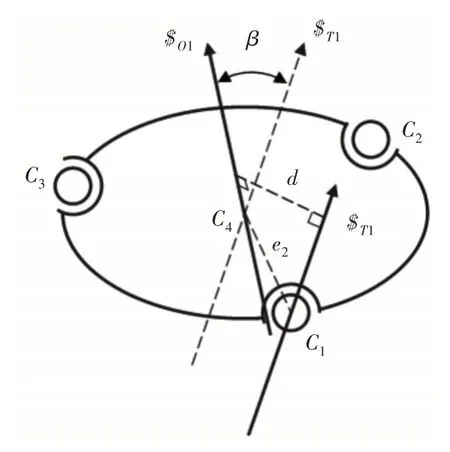
图3 与的位置Fig.3 The Position of and
同理可得,支链2和支链3的输出传递指标η2和η3为:
5 数值算例
以文献[7]提出的平衡康复训练为背景,设定期望的优质工作空间范围:动平台的三个方向的转动范围均不小于30°。
5.1 算例1
定义机构的一组设计参数,如表1所示。

表1 设计参数Tab.1 Design Parameters
定义机构的一组运动参数,如表2所示。

表2 运动参数Tab.2 Movement Parameters
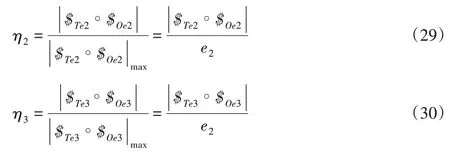
在给定的在机构参数下,求解动平台处于不同γ转角的位姿时机构的LTI,如图4所示。
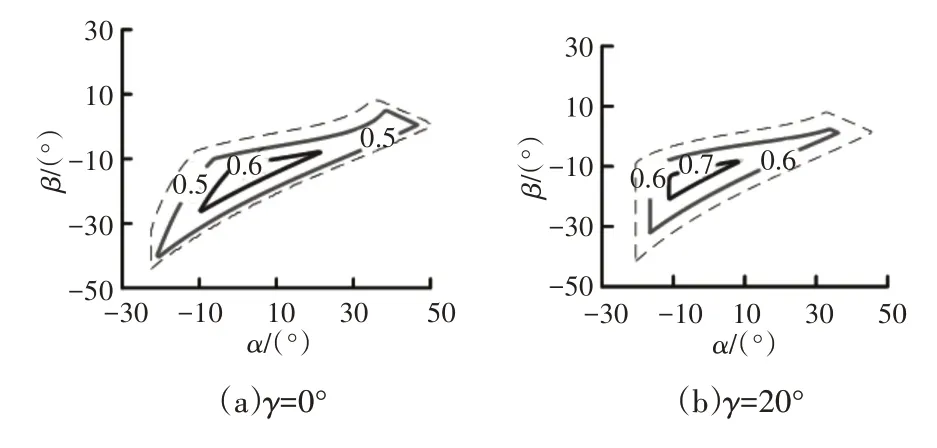
图4 机构的性能图谱Fig.4 Performance Atlas of the Mechanism
由图4可知,当γ=20°,30°,40°,50°时,在给定的一组机构参数下,3-RSS/S并联机构的优质工作空间范围较大,但并不符合康复训练所需的运动空间。
5.2 算例2
只改变机构l4的长度,定义另一组设计参数,如表3所示。

表3 设计参数(2)Tab.3 Design Parameters(2)
定义另一组运动参数,如表4所示。

表4 运动参数(2)Tab.4 Movement Parameters(2)
则在不同γ转角位姿时求解机构的LTI,如图5所示。

图5 机构的性能图谱(2)Fig.5 Performance Atlas of the Mechanism(2)
相比于图4可知,l4长度的改变,显著改善了3-RSS/S机构的局部传递指标,机构的优质工作空间明显得到扩大,符合期望的工作空间。本组机构参数是否为平衡康复训练背景下3-RSS/S机构的最优尺寸还需后续研究,但为以3-RSS/S机构传递性能为目标函数的尺度优化工作奠定基础。
6 结论
对3-RSS/S 机构的运动/力性能传递指标进行研究,使用闭环矢量法求解的运动学逆解,基于能效系数法定义并求解机构的局部传递指标。得到以下主要结论:(1)采用闭环矢量法求解3-RSS/S的运动学逆解,并通过数值算法能够判定动平台某位姿下多组解属于何种构型。(2)基于旋量理论,使用能效系数法推导得到3-RSS/S机构的性能传递指标,其运动/力输入传递指标只与支链的逆压力角有关。(3)机构设计参数l4的改变能够显著影响机构的局部传递指标,改善机构的运动/力传递性能。为之后对机构进行尺度优化奠定基础。