基于变车距策略交叉路口网联式车辆入队控制研究
2022-11-21李香芹曹青松章小平
李香芹,曹青松,章小平
(1.江西科技学院智能工程学院,江西 南昌 330098;2.江西科技学院协同创新中心,江西 南昌 330098)
1 引言
无信号交叉路口因为交通环境复杂,通行效率低,交通事故频发,是交通控制的重要组成部分。网联式车辆由于安装了先进的传感器、执行器和控制器,利用现代通信、网络和定位技术监测车辆的行驶状态,引导车辆自动编队组队,实现人、车、路的信息共享与交互,是提高交叉路口通行效率的一项重要研究举措,也是自动化公路系统研究的关键技术[1]。
近年来,国内外众多学者从网联式车辆队列化控制、交叉路口协同换道控制等方面展开了相关的研究。文献[2]从车队换道过程速度、纵向位置、车辆间距等方面研究了车队换道行驶规律,建立了车辆纵、横两个方向的行驶动力学耦合模型。文献[3]利用饱和流率模型对信号交叉路口通行能力进行分析,并分析了车队间距、停车时间对信号交叉路口通行能力的影响。文献[4]以交叉路口车队通行过程为研究对象,分别建立了离散化模型、行驶路径模型、冲突点约束模型等,在此基础上建立了综合的交叉路口管控方法AIC(AIC:Autonomous Intersection Control)模型,以优化车辆进入交叉路口的时刻和行驶路径。文献[5]基于协同自适应巡航控制系统,以减少车辆交叉路口延误时间和燃油消耗为目标,提出了一种无信号交叉路口协同控制优化算法和控制策略。文献[6]基于车车通信、车路通信设施,提出了考虑车辆间隙误差的无信号交叉路口车辆管理控制策略以确保主干道车辆安全通行。文献[7]针对交叉路口车辆通行效率低的问题,提出了一种蚁群算法来解决车辆数量大时的交叉路口控制问题。文献[8]针对自动驾驶车辆到达交叉路口速度、到达时间等因素,建立了车辆通过交叉路口模型,采用协调控制策略优化交叉路口排队等待时间问题。文献[9]以无信号交叉路口主、次路车车流量为研究对象,考虑了车流速度、车头间隙等因素建立了主、次路车队控制模型。文献[10]基于车联网技术及导航定位对交叉路口冲突进行分析,建立交叉路口车辆冲突消解模型和多车交互式协调控制策略。文献[11]基于车辆队列技术及无线通信技术,针对智能网联车队车辆的出队与入队问题,提出了一种车队协同换道入队控制方法。文献[12]以最小安全车头间隙为优化目标提出了一种无信号交叉路口车队协同控制策略。
综合上述研究背景,这里以常见的交叉路口车辆右转弯场景为例,建立车队在交叉路口车辆动力学模型及协同控制策略,利用MATLAB软件仿真,从车队速度、加速度、相邻车辆间距、纵向位置、行驶轨迹等方面分析网联式车辆在交叉路口入队过程对主路车队的影响程度,证明建立的模型及控制策略的正确性及安全性。
2 交叉路口车辆入队场景描述
假定主、次路交叉路口处没有信号灯,道路两侧安装了路测设备,收集道路车辆及车队信息,通过车联网技术监测与控制车辆的行驶状态,车辆能否入队由车队领队车进行信息判断。以右转弯场景为例,如图1所示。在主路上有一列车队以一定速度驶向交叉路口,包含1个领队车和n个跟随车,车队任意相邻车辆能保持理想间距d,各车速度、加速度以领队车为准,次路上有请求入队的B车正驶近交叉路口。
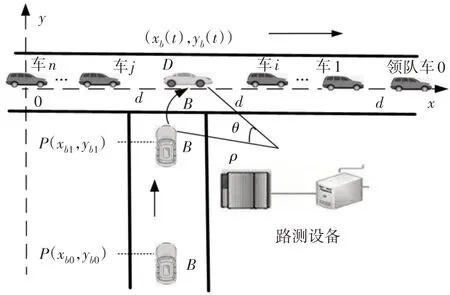
图1 交叉路口场景图Fig.1 Intersection Scene
领队车接收B车入队请求后,根据车队及B车速度、加速度、位置等信息判断B车是否满足入队条件,是否存在可插入间隙、是否发生碰撞等,如果可以入队,则控制车队车辆车速,令i、j车之间逐渐预留出一定安全间距D,相当于在i、j车之间提前空出虚拟车位等待B车入队。
B车接收入队允许信息后调整车速,在次路上先减速行驶,该时刻为t0,位置为P(xb0,yb0),速度为vb0,至交叉路口停车线位置时刻为t1,位置为P(xb1,yb1),速度为vb1;接着B车从停车线位置开始以一定曲率、速度转向弯道行驶至主路并汇入到车队第i、j车之间的虚拟车位位置。完成入队后,车队ID位置重新编号,车队控制目的是使B车速度、加速度与车队达到一致,相邻车辆间距误差尽可能为0。
3 车联网下交叉路口车辆动力学模型
3.1 次路B车交叉路口运动分析
(1)次路上的均减速直线行驶阶段,运动方程为:

式中:a1—B车均减速度;s1—B车次路减速行驶距离。
(2)转向弯道行驶阶段,忽略转向、悬架、地面等对车辆的作用,假设均加速行驶至主道车队虚拟车位位置(xb(t),yb(t)),该时刻为t2,行驶方程为[12]:

式中:δ—B车前轮转向角;a2—B车弯道加速度;xb1、yb1—B车交叉路口停车线位置;Δt=t2-t1—B车弯道行驶至虚拟车位的时间。

式中:dib、dbj—B车与i、j车之间纵向间距分别为,其中dmin≦dib≦dmax,dmin≦dbj≦dmax,dmin、dmax—预设的最小安全间距和最大安全间距。车队i、j车之间预留出安全间距D应包括车长及前后车间距,即D=L+dib+dbj,且i、j车之间预留出安全间距D的时间与B车转弯行驶至主路到达虚拟车位的时间相等。

式中:a3—车队j车及其后车的减速度;vj(t1)、vj(t2)—t1、t2时刻j车速度;L—车身长度。
(3)B车入队后的运动控制。
车队控制最终结果是B车入队时车队中各车辆间距误差、速度误差波动为0,B车与i、j车的间距误差可以表示为:

B车入队后的速度与车队速度误差可以表示为:

3.2 车队交叉路口运动分析
(1)车队在B车入队前的运动分析
根据文献[13]建立的车辆动力学模型:

其线性化状态反馈为:

简化为线性方程:

其中,
式中:mi—车辆i的质量;Fi—车辆i的驱动力;Fwi和Ffi—车辆i的空气阻力和机械阻力,通常设置为常量;τi(vi)—与车辆i速度相关的发动机时间常数。
依据式(11),利用外部输入量Coni线性化车队车辆i的非线性动力学,得到系统输入ui为:

车辆行驶状态可用线性微分方程表示为:

式中:xi、vi、ai—车队任一车辆当前时刻t的位移、速度、加速度。
主路车队每辆车的控制规律为:

式中:cp,cv,ca,kv,ka—车辆控制器参数;xi(t)、xj(t)—t时刻第i、j辆车的位置;dij—第i辆和第j辆车的期望车距;d,vi(t)、vj(t)—t时刻第i、j辆车的速度;ai(t)、aj(t)—t时刻第i、j辆车的加速度,i、j=1,2,…,n,n为队列中车辆的数目。
(2)车队在B车入队过程中的运动分析
B车拟插入i、j车之间,为保证B车与i、j车间的安全距离,相当于将原i、j车之间的间距应增大到原来理想间距dij的两倍,控制规律仍采用式(15),为了避免控制效果发生波动,原i、j车间距在整个入队过程中缓慢递增,如下式:

原车队数量加1,i、B、j车之间的间距分别为d,车队控制规律仍为式(15)。当入队过程完成时,原i、j车的间距变为D,即:

4 实例仿真研究
假设车队车辆数为5,领队车编号0,其他车辆依次为1-4号。领队车接收B车请求入队信息后判断B车满足入队条件则指令3、4号车减速行驶,1、2号车及领队车仍保持匀速行驶,2、3号车之间逐渐留出安全间距D和虚拟车位。
设定所有车的车身长度均为4m,仿真时间设置为40s,控制器参数cx,cv,ca分别设置为5、49、120,控制器参数kv,ka分别设置为10、25,相邻车辆理想间距d为10m,入队过程中2、3车间的安全间距D最小为20m,dmin、dmax分别为6m和10m,B车交叉路口速度VB1为8m/s,车队初始速度即领头车速度u为8m/s,车队中各车辆与领队车的速度、加速度保持同步运行,领队车加速度设定为:

基于不变车距和采用变车距控制策略分别仿真B车入队过程中车队车辆的加速度、速度、相邻车辆间距误差、位移的变化曲线,如图2~图5所示。
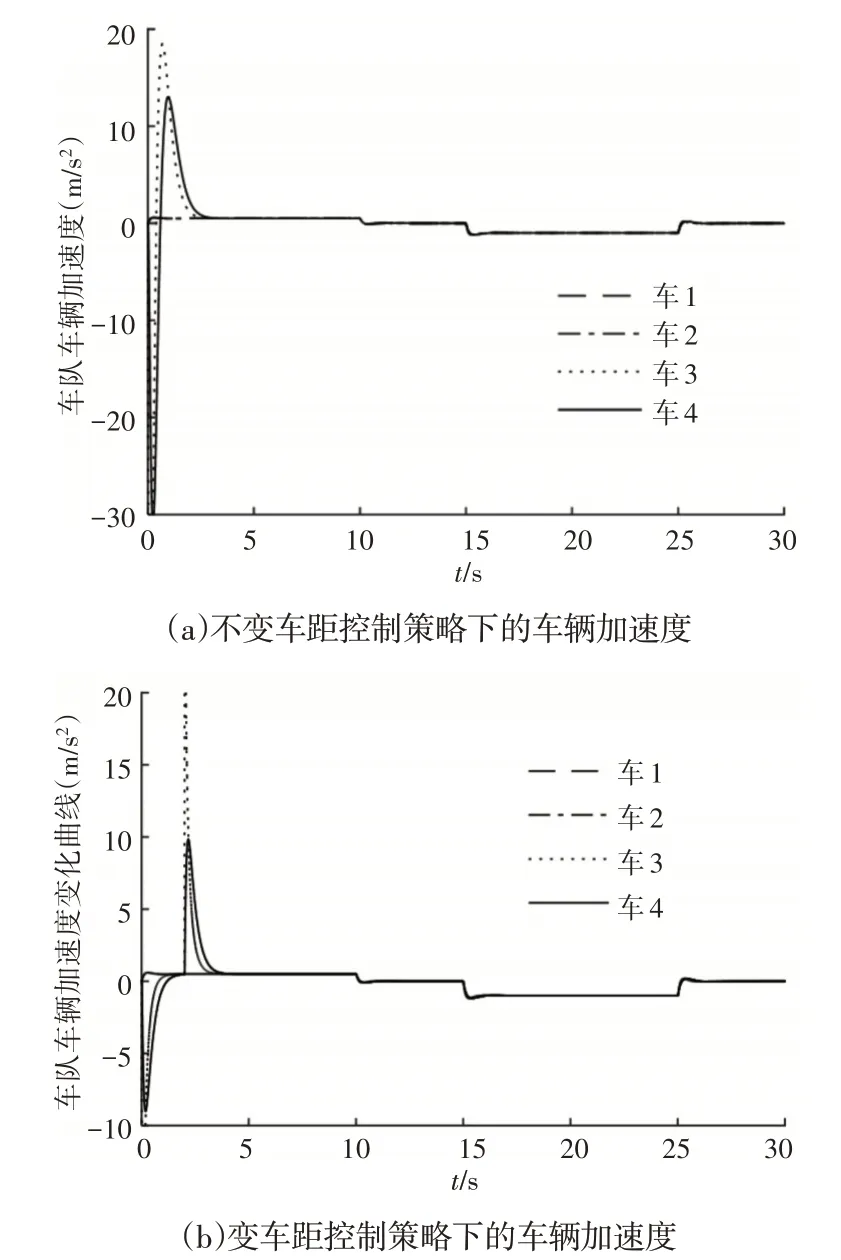
图2 不变车距、变车距控制策略下的车辆加速度示意图Fig.2 Schematic Diagram of Vehicle Acceleration under Constant and Variable Vehicle Distance Control Strategy
B车入队时车队采用不变车距和采用变车距控制策略下的车辆加速度变化曲线,如图2所示。图2(a)显示采用不变车距控制策略时B车入队过程中3、4号车的加速度变化规律相似,即先减速后加速,且减速程度大于加速程度,其中3号车的加速度变化范围为[-30m/s2,18m/s2],变化范围最大;4号车加速度变化范围[-30m/s2,14m/s2],变化范围较大;说明3、4号车在行驶过程中减速明显。1、2号车的加速度与领队车保持同步加减速,3.5s之后1-4号车的加速度与领头车辆的加速度保持一致。而图2(b)采用变车距控制策略后,3、4号车加速度绝对值的最大值降低,变化范围为[-10m/s2,20m/s2],与不采用变车距控制策略相比,减速程度降低,加速程度增加。在行驶过程中,减速度太大将降低行车安全性,采用变车距控制策略后,3、4号车的减速程度均得到改善。B车入队时采用不变车距控制和变车距控制策略下的车辆速度变化曲线,如图3所示。图3(a)显示B车入队过程中,3、4号车都减速,1s左右时3号车的速度为负值,4号车的速度接近0值,表明B车入队时3号车在1s时倒车、4号车停车,等待B车的安全入队。而采用变车距控制策略时,3、4号车的最低速度接近6m/s,并保持这个速度行驶1s左右,速度在4.5s时与1、2号车车速一致,说明3、4号车在B车入队过程无需倒车、停车操作,提高了车队行驶安全性。
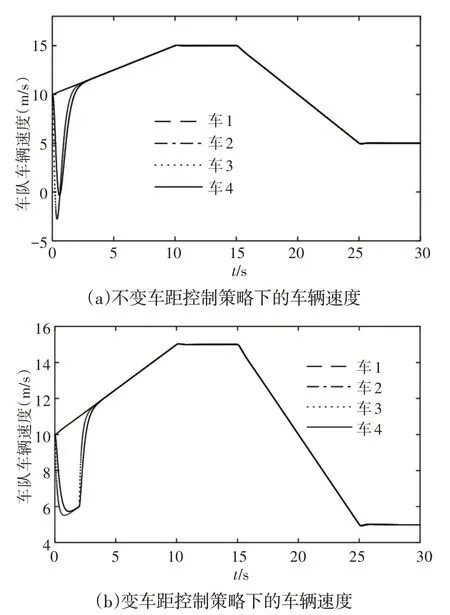
图3 不变车距、变车距控制策略下的车辆速度示意图Fig.3 Vehicle Speed Diagram under Constant and Variable Vehicle Distance Control Strategy
B车入队时采用不变车距控制和变车距控制策略下的车队各车辆纵向位置变化曲线,如图4所示。图4(a)显示采用不变车距控制策略时B车入队过程中,3号车起始位置为10m,但在1s时其位移小于10m,相当于3号车在1s时倒退行驶,同样地4号车在1s处也倒车行驶。而图4(b)采用变车距控制策略时,在B车入队过程中3、4号车都不需要倒车行驶。
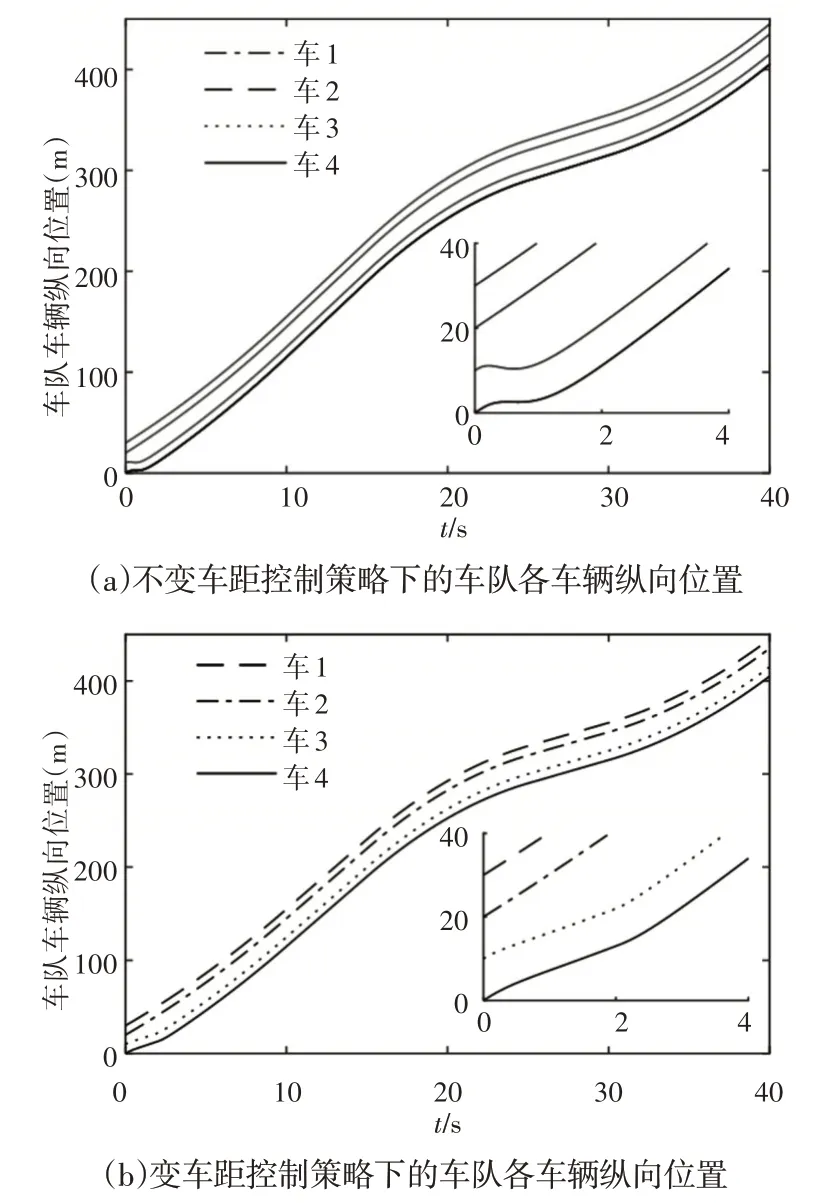
图4 不变车距、变车距控制策略下的车队各车辆纵向位置示意图Fig.4 Schematic Diagram of Longitudinal Position of Each Vehicle in the Fleet under the Control Srategy of Constant Distance and Variable Distance
B车入队时采用不变车距控制和变车距控制策略下的车辆间距误差变化曲线,如图5所示。图5(a)显示采用不变车间策略时B车入队过程中,2、3 号两车之间的间距误差从10m 变化到0m,3、4号车之间的间距误差最大时达到为2.2m,即2、3号两车之间在B车入队前需提前预留20m间距,3、4号车之间的间距误差1s左右时变为-2.2m,之后又变为0m,可知B车入队1s时,3号车向后倒退行驶。而图5(b)采用变车间控制策略可以明显地降低车辆间距误差,2、3号两车之间间距误差从0变化到-1.1m再到0,其间距误差比采用不变车距控制策略下的车辆间距误差变化范围更小。B车入队过程的轨迹路线,如图6所示。
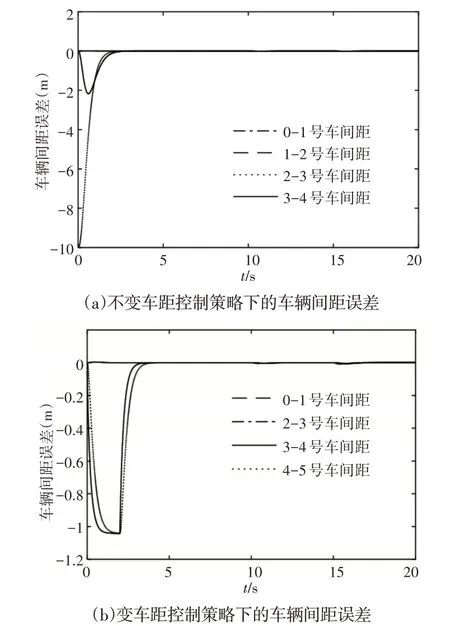
图5 不变车距、变车距控制策略下的车辆间距误差示意图Fig.5 Vehicle Spacing Error Diagram under Constant and Variable Vehicle Spacing Control Strategy
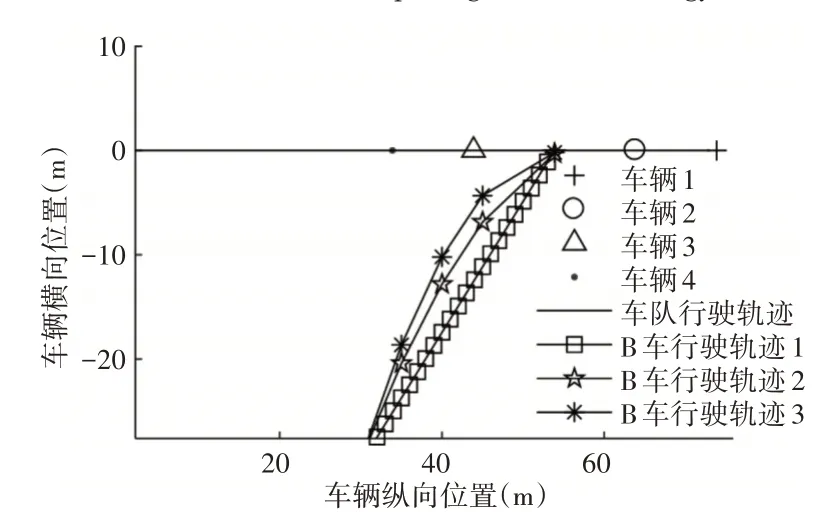
图6 B车入队行驶轨迹路线Fig.6 Vehicle B Entering the Team Route Curve
由图6可知,B车入队行驶轨迹路线,以车队行驶中心线为x坐标轴,B车到达接近交叉路口的某位置为(30,-30)。假设车队在初始位置时,接受到B车入队请求并同意入队,车队按照变车距控制策略,跟随领头车继续前进,在3.5s时,车辆2、3之间安全间距D达到20m,两车之间的中点位置为(55,0),为B车此时入队已经做好准备。B车行驶轨迹与其初始速度、接受入队时的位置及入队速度有关。设B车从交叉路口位置开始以初速度为8m/s向车队汇合,在入队点位置时,速度与车队速度保持一致,B行驶轨迹1为斜直线,长度为44m,B车保证入队位置恰好为(55,0),顺利入队。同时,假定轨迹1斜率恰好能满足交叉路口的右转弯要求,小于此斜率时,车辆不能安全转弯。B车可按照一定的曲率行驶,如轨迹2、3,也可以顺利入队。
基于上述分析可知,采用变车距控制策略时可以明显减小B车入队过程对车队3、4号车的影响,且在入队完成后,车队车辆能与领队车恢复保持一致的加速度、车速,相邻车间距误差值逐渐收敛趋于0,即在纵向位置上车队车辆能与相邻车均保持安全间距。
5 结论
这里通过分析车辆在交叉路口右转弯换道入队的行驶特征,建立入队车的行驶轨迹运动方程,结合发动机动力学模型建立车联网下的车辆入队动力学模型及车队队列控制模型,通过MATLAB仿真分析入队车的入队过程对车队的加速度、速度、纵向位置、相邻车辆间距误差的影响程度,分析了入队车在交叉路口的行驶轨迹。仿真结果表明:建立的交叉路口车辆动力学模型及控制模型在车辆入队过程中稳定性好,在实现交叉路口车辆安全入队的同时,在纵向上能够使车队保持理想的速度、加速度、车辆纵向位置和相邻间距误差。本研究为提高交叉路口车辆通行效率及通行安全研究提供一定的参考价值。