一类1T2R并联机构拓扑结构综合及优选
2022-10-31汪满新李兰彬李正亮刘海涛
汪满新 李兰彬 李正亮 刘海涛 黄 田
1.南京理工大学机械工程学院,南京,2100942.天津大学机构理论与装备设计教育部重点实验室,天津,300072
0 引言
以一平动两转动(1T2R)三自由度并联机构为主机构的五自由度混联装备因不同程度上继承了传统串联机器人和数控机床在可重构性、工作空间、速度、刚度和精度方面的优点,引起了工业界及学术界的普遍关注,且已在工程中得到应用[1-2],如Tricept机器人已成功用于大型结构件和大型模具高速加工、板材高速切削、列车车体及飞机机翼钻孔加工等方面[3-4];DS Technology公司制造的Sprint Z3 Head成功应用于航空、航天、汽车等领域大型结构件高速铣削加工[5-6];此外,近年出现的混联模块Exechon机器人[7-8]和Trimule机器人[9-10],因大大减少了并联机构的节点数目或节点自由度数目,故在保持良好的灵活性的同时还获得高刚度,具有巨大的应用潜力,目前均已生产制造出多台样机。鉴于该类混联装备应用前景广阔,故研究其拓扑结构综合和优选方法具有重要的意义。这类装备的综合和优选关键在于1T2R三自由度并联机构型综合和优选。
许多学者在并联机构型综合方面做了大量研究工作,并形成了多种综合方法[11],主要包括:位移流型法[12]、约束螺旋理论法[13]、单开链法[14]、GF集法[15]、虚拟链法[16]、有限旋量法[17]等。其中约束螺旋理论综合法是机构综合最常用的方法之一,其核心思想是:根据机构所期望的自由度数目和类型要求,通过两次求反螺旋系,构造出各分支运动螺旋系及其运动链需满足的几何约束条件,进而通过支链的合理组装和驱动副的合理选择综合出相应机构。黄真等[13]对约束螺旋综合方法的原理和步骤进行了详细阐述,并归纳出构成9类少自由度并联机构的分支约束螺旋系应满足的几何约束。FANG等[18]、LI等[19]、KIM等[20]、XIE等[21]进一步应用和发展了该理论并提出多种少自由度并联机构新构型,如XIE等[21]借助线几何描述刚体瞬时运动与约束,提出一种可视化的并联机构型综合方法,并得到多种新颖的1T2R并联机构。KONG等[16]在此基础之上提出了虚拟链综合法,并综合出具有UP等效运动模式的1T2R并联机构,汪满新等[22]借助虚拟链综合法综合出具有UPR-SPR等效运动模式的1T2R并联机构。
需指出的是,约束螺旋理论法需以支链为对象构造约束力系,虽普适性强,但需事先掌握较为深奥的螺旋理论。为了避免该问题,HUANG等[23]提出两类由一条含平面并联运动链的复杂支链和一条空间支链组成的1T2R 并联机构。第一类平面并联运动链包含两条平面驱动支链和一条恰约束平面从动支链使得平面并联运动链具有1T1R运动,该平面运动链再串接一转动副即可实现1T2R运动,并添加一条空间无约束主动支链提供第三个驱动。第二类平面并联运动链由两条平面驱动支链组成,并通过串接一转动副实现2T2R运动,为限制多余的1T运动并添加一个驱动力,该机构添加了一条含1个约束力的空间支链。与以支链为对象的构型综合方法相比,按照上述方式分解动平台的 1T2R 运动有利于直观地理解,进而大幅度简化这类机构型综合问题。此外,该文还从机构位姿能力匹配的恰当性、支链结构的力学合理性、机器人模块的可重构性以及位置正逆解的解析解简易性等方面提出机构拓扑结构优选准则,为如何从众多构型中遴选出有潜在工程价值的拓扑结构提供了思路。因该文所提出的并联机构均仅含一条空间支链,故均为面对称1T2R并联机构,不具备三对称的特性。
本文应用平面机构的组成原理和约束特性,提出由一条串接一转动副的1T1R平面并联运动链和两条空间无约束主动支链组成的1T2R并联机构拓扑结构综合方法,所综合出的新型1T2R并联机构可具备运动学三对称特性。在此基础上,提出动平台结构紧凑性等拓扑结构优选准则,并开展拓扑结构优选,进而完成一种可继承Tricept机器人优点的新型五自由度混联机器人模块概念设计。
1 拓扑结构综合
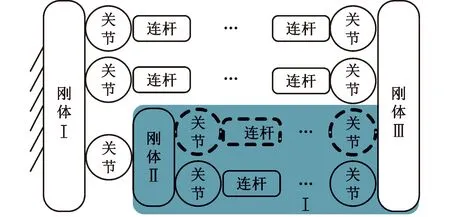
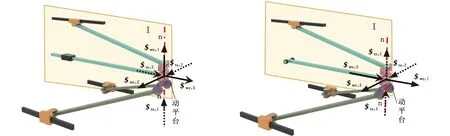
图1为一类1T2R并联机构的一般结构简图,该机构由一条含平面并联运动链的复杂支链和两条空间无约束主动支链组成,平面并联运动链包含一条主动支链和一条恰约束平面从动支链。恰约束平面从动支链是指该从动支链的末端运动与其所在的平面并联运动链的末端运动完全相同,空间无约束主动支链是指含驱动副且末端可实现6个空间自由度的支链。因两条空间无约束主动支链不存在任何约束,故图1所示机构的末端运动模式与含平面并联运动链的复杂支链完全相同。平面运动链最多可实现2T1R运动,它与1T2R运动相比,需限制1T运动,且需添加1R运动。为限制1T运动,可将恰约束平面从动支链的运动设定为1T1R运动;为添加1R运动,可在平面并联运动链的一端连接一个轴线与该平面平行的R副。如图1所示,空间支链的两端杆件为刚体Ⅰ和刚体Ⅲ,平面并联运动链的两端杆件为刚体Ⅱ和刚体Ⅲ,刚体Ⅰ和刚体Ⅱ通过一轴线为n-n 且与平面Ⅰ共面的转动副连接。

图1 1T2R 并联机构的一般结构简图Fig.1 General structure of 1T2R parallel mechanisms
根据运动互逆原理,可分别将体Ⅰ和体Ⅲ视为机架,从而得到两类1T2R并联机构。在类型1中,体Ⅰ为机架,体Ⅱ和体Ⅲ分别为平面并联运动链的连架杆件和输出杆件(即动平台),如图2a所示。在类型2中,体Ⅰ为动平台,体Ⅱ为平面并联运动链的输出杆件,体Ⅲ为机架(即平面并联运动链的连架杆件),如图2b所示。
(a)类型1

(b)类型2图2 1T2R并联机构两种类型Fig.2 Two subfamilies of 1T2R parallel mechanisms
为了保障所综合出的机构具有良好的刚性和实用性,在此做出如下限定:一是采用移动副驱动,二是主动支链连接输出杆件的运动副不为移动副,三是系统仅使用R副、P副、U副、S副等常用运动副,在此R副、P副、U副、S副分别表示转动副、移动副、虎克铰和球副。故前文所述的空间无约束主动支链可利用的结构有UPS支链和PUS支链,在此P为主动移动副。可实现1T1R运动的恰约束平面从动支链可利用的结构有PR支链、RP支链和RR支链,而平面并联运动链中主动支链可利用的结构有RPR支链和PRR支链。据此可得到如表1所示的1T2R并联机构的构型,图3示出了其中的8种构型,表2给出了图3中符号的含义。若为了释放过约束,表1中的RPR支链也可使用RPS和RPU等支链替代,PRR支链可用PRU和PRS等支链替代。
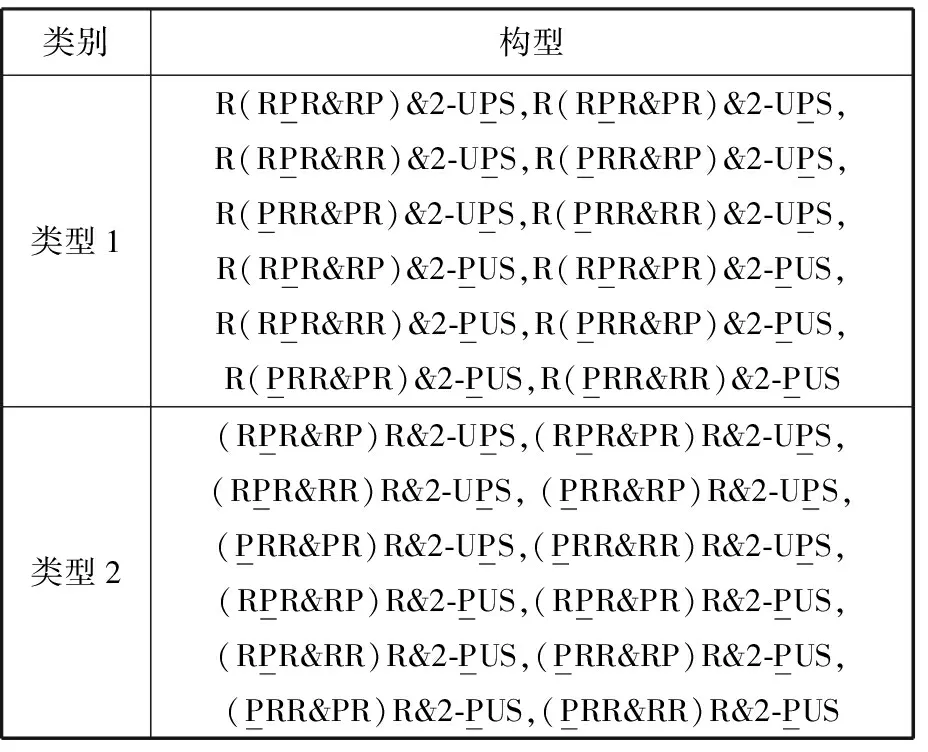
表1 1T2R过约束并联机构
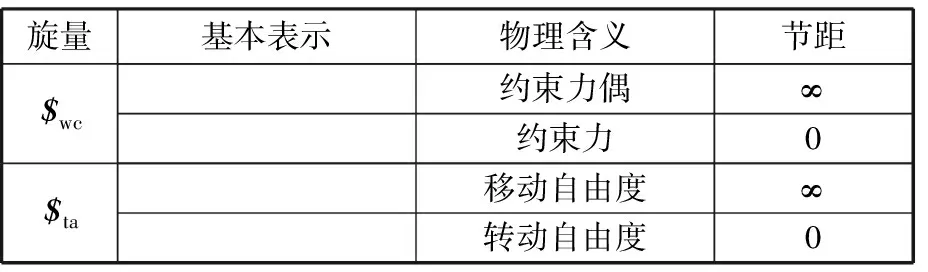
表2 旋量的符号及其几何含义
2 构型优选
为从综合得出的机构中筛选出具有工程实用价值的构型,本文将从机构位姿能力匹配的恰当性(准则1)、支链结构力学合理性(准则2)、机器人模块的可重构性(准则3)、位置逆解解析解的简易性(准则4)等方面考虑机构型优选[23]。此外,考虑到动平台重力对机构末端变形具有重要影响[24],期望动平台可实现结构紧凑的轻量化设计,故本文提出将动平台结构的紧凑性作为机构型优选的准则5。
从机构位姿能力匹配的恰当性(准则1)来看,因UPS和PUS均为6自由度支链,不会影响机构末端的位姿,故1T2R并联机构的位姿能力由含平面并联运动链的支链决定。支链结构为R(RPR&RP)、R(PRR&RP)、R(RPR&RR)、R(PRR&RR)运动链的两个转轴均靠近机架,故为位置型机构;(RPR&PR) R、(PRR&PR) R、(RPR&RR) R、(PRR&RR)R两个转轴均靠近动平台,故均为姿态型机构;而支链结构为R(RPR&PR)、R(PRR&PR)、(RPR&RP)R和(PRR&RP)R的运动链一个转轴靠近机架而另一个转轴靠近动平台,故此类机构的位姿属于混合型,不符合位姿能力恰当性的准则要求。此外,因R(RPR&RR)、R(PRR&RR)、(RPR&RR)R、(PRR&RR) R支链无Z轴方向行程,也将导致机构的位姿能力下降,因此,表1中凡是含R(RPR&PR)、(PRR&RP)R、R(PRR&PR)、(RPR&RP)R、R(RPR&RR)、R(PRR&RR)、(RPR&RR) R、(PRR&RR) R支链的1T2R并联机构均不满足准则1的要求。
从支链结构力学合理性(准则2)来看,期望支链可设计成结构紧凑且具有高的抗弯曲、抗扭转的刚度/质量比等特性,SPR、UPR、PRS、UP是具有这类特性的典型代表,分别在Exechon、Sprint Z3和Tricept机器人中得到应用,其特点在于支链约束力集中于一端,且另一端有空间可做成具有高抗弯刚度的截面,如若不满足该特点,支链的受力性能将大大减弱,如图3b和图3e所示的两个机构不满足此准则要求。表1中R(RPR&PR)支链、R(PRR&PR)支链、(RPR&RP)R支链和(PRR&RP)R支链的约束力分布在支链两端,从而不满足准则2的要求。

(a)R(RPR&RP)&2-UPS (b)R(RPR&PR)&2-UPS

(c)R(RPR&RR)&2-UPS (d)R(PRR&RP)&2-PUS
(e)(RPR&RP)R&2-UPS (f)(RPR&PR)R&2-UPS
(g)(PRR&PR)R&2-PUS (h)(PRR&RR)R&2-PUS图3 8种1T2R并联机构Fig.3 Eight kinds of 1T2R parallel mechanisms
从机器人模块的可重构性(准则3)来看,期望1T2R机构成为一个结构紧凑的即插即用模块,因此一个合理的 1T2R 机构应具有较大的作业空间/机架占地比,故位置型 1T2R 并联机构宜采用内移动副驱动,姿态型机构宜采用外移动副驱动,否则容易发生干涉导致作业空间受限或机架尺寸过大。
因本文所提出的机构均具有恰约束支链,故本文所提出的机构均有望存在位置逆解解析解(准则4)。
为使动平台结构紧凑(准则5),期望各支链与动平台连接的铰链数量少且越简单越好,如图3a和图3d所示,中间支链与动平台固接,与动平台连接的铰链数仅有3个;而图3b、图3c和图3e与动平台连接的铰链数有4个,而图3f、图3g和图3h动平台处的铰链数量有5个,不仅增大了动平台设计复杂度,且影响末端转头的连接,为了避免干涉不得不牺牲动平台结构的紧凑性。
依据上述准则,表3给出了各构型是否满足各准则条件的结果。由表可见,仅有R(RPR&RP)&2-UPS并联机构满足全部5项准则。

表3 5项选型准则检验1T2R并联机构型的结果
3 五自由度混联机器人概念设计
本节以优选出的R(RPR&RP)& 2-UPS并联机构为主机构,完成一种新型五自由度混联机器人的概念设计。该并联机构由两条UPS支链以及一条R副串接1T1R平面并联运动链的复杂支链共同组成,其中1T1R平面并联运动链由RPR支链和RP支链构成。为改善机构的装配工艺,用RPS支链替代RPR支链。这种替代虽然释放了两个过约束,但并不改变施加在动平台上的约束力系。此外,通过工程设计可确保RP支链能够承担绝大部分施加在动平台上的约束力。
在R(RPS&RP)&2-UPS并联机构末端串接A/C摆角头,发明了图4所示的新型五自由度混联机器人Trifree。从图3a和图4中可直接验证R(RPS&RP)&2-UPS并联机构满足各支链结构力学合理性和动平台结构紧凑的准则,下面从机构位置逆解、工作空间(位姿能力)和可重构性验证所提出的新型并联机构的性能。

图4 Trifree机器人Fig.4 Trifree robot
3.1 位置逆解分析
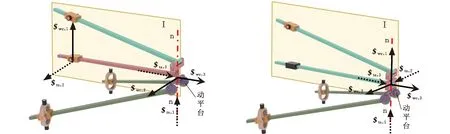
图5为新型并联机构结构简图,其中点Ai表示第i(i=1,2,3)支链与动平台铰接的球副中心,构成等边三角形△A1A2A3,点Bi表示第i(i=1,2,3)支链的虎克铰中心,构成等边三角形△B1B2B3。为了便于描述,首先以△B1B2B3中心点O为原点,建立固定参考系{R},其中,x轴方向由点O指向点B1,z⊥△B1B2B3,方向指向动平台,y轴由右手定则给出。相似地,以△A1A2A3中心点O′为原点,建立动平台连体坐标系{R′}。此外,定义末端参考点P位于A轴和C轴轴线的交点,令sj,i表示支链i中第j个运动副的单位矢量,注意到中间支链中的P副与动平台固接,故动平台连体坐标系{R′}相对于系{R}的旋转矩阵R可由支链4绕x轴旋转α、绕y′轴旋转β后得到
R=Rot(x,α)Rot(y′,β)=
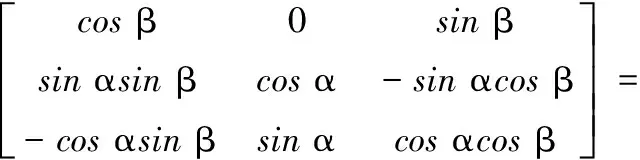
(1)
式中,n1,4=s2,4×s3,4。

图5 R(RPS&RP)&2-UPS并联机构结构简图Fig.5 Schematic diagram of R(RPS&RP)&2-UPSparallel mechanism
由图5可知,末端参考点P在系{R}中的位置矢量rP=(xP,yP,zP)T可表示为
rP=bi+qis3,i-ai+es3,4i=1,2,3
(2)
rP=(q4+e)s3,4
(3)
其中,qi为支链i的杆长;e为点O′到点P的距离;bi和ai分别表示在系{R}下,点O到点Bi的方向矢量和点O′到点Ai的方向矢量,且
ai=Rai0ai0=aisibi=bisi
(4)
i=1,2,3
ai=abi=bsi=(cosφi,sinφi,0)T
φ1=0φ2=2π/3φ3=4π/3
式中,ai0为ai在系{R′}下的度量。
联立求解式(1)和式(3)可得
(5)
(6)
将求得的α、β代入式(1)中,即可计算旋转矩阵R和s3,4,进而可得
qi=|rP+ai-es3,4-bi|
(7)
显然,R(RPS&RP)&2-UPS并联机构具有位置逆解显示解。
3.2 工作空间分析
(8)
令ai0=(ai0x,ai0y,ai0z)T,ci=(cix,ciy,ciz)T,则由q4s3,4+Rai0=ci,可求出
(9)
由式(9)可求得s3,4,进而由式(3)可得到末端点P的位置,然后根据位置逆解可计算出其他两条主动支链的杆长、方向矢量及虎克铰转角。
设驱动支链杆长的最大值和最小值分别为qmax和qmin,支链近架转动副和远架转动副的最大转角分别为αmax和βmax,分别令qi为qmax和qmin,以αmax和βmax为约束条件,随着αi和βi的变化,可得到末端点P位置坐标张成的空间曲面si,max和si,min。此6个边界面所合成的空间即为并联机构的可达空间,如图6所示。
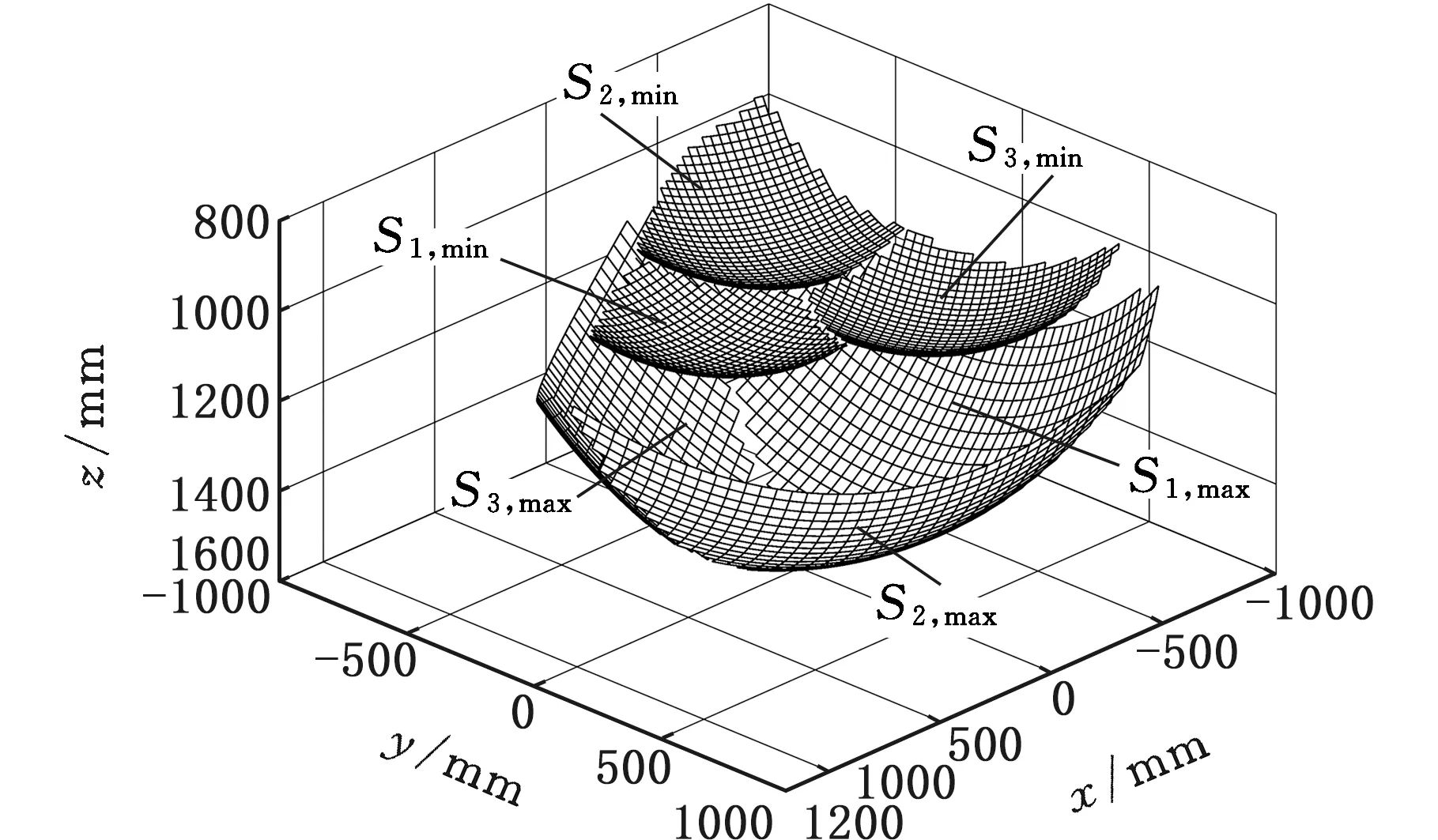
图6 可达空间Fig.6 Reachable workspace
为提高可达空间的利用率,定义由半径为RC、高度为h1的圆柱体和半径为RS、高度为h2的球缺体组合而成的规则体为点P的任务空间Wt,如图7所示。进而可定义机构的任务空间/机构体积比为
(10)
(11)
式中,V为任务空间Wt的体积;q4min和q4max分别为被动支链杆长的最小值和最大值。
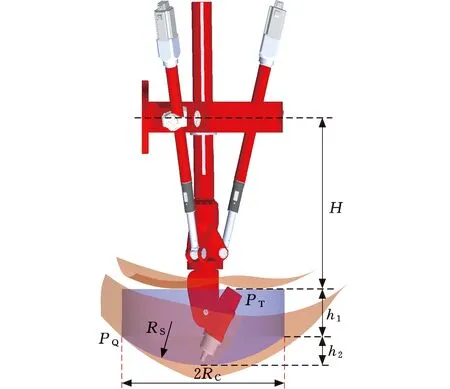
图7 混联机构工作空间示意图Fig.7 Schematic diagram of the hybridmechanism workspace
当给定机构尺度参数a=135 mm,b=370 mm,qmin=660 mm,qmax=1260 mm,e=360 mm,αmax=βmax=40°时,可求得λw=2.20,说明所提出的新型并联机构具有较高的空间利用率,具备良好的位姿能力。
3.3 与Tricept机器人对比分析及可重构性分析
该机器人继承了Tricept机器人(图8)的优点,其特色主要体现在如下几个方面:
(1)R(RPS&RP)&2-UPS并联机构为位置型并联机构,具有工作空间/机架体积比大的特点,串接A/C摆角头后,可实现末端姿态的调整。新型混联机器人末端运动模式相当于3T2R。
(2)与 Tricept机器人相比,机器人在原理上可省去3个(实际上省去了1个)R副,且可与Tricept机器人的绝大部分部件互换。
(3)可设计成三对称形式,具有与Tricept 机器人完全相同的运动模式,继承Tricept机器人的运动学性能。
(4)与 Tricept 机器人类似,可在A/C摆角头输出端、R(RP)支链从动关节上安装圆光栅和直线光栅,因此具备实现全闭环反馈控制的功能。
(5)与 Tricept 、Exechon 、Trimule等机器人类似,可将该机器人制成一个即插即用的模块,用于搭建出形式多样的机器人化作业单元和移动工作站。图9示出两种用该机器人模块搭建的装备布局方案和潜在的工程应用场景。

图8 Tricept机器人Fig.8 Tricept robot
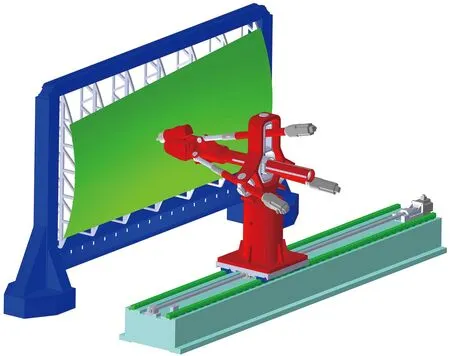
(a)搭载在长行程导轨上
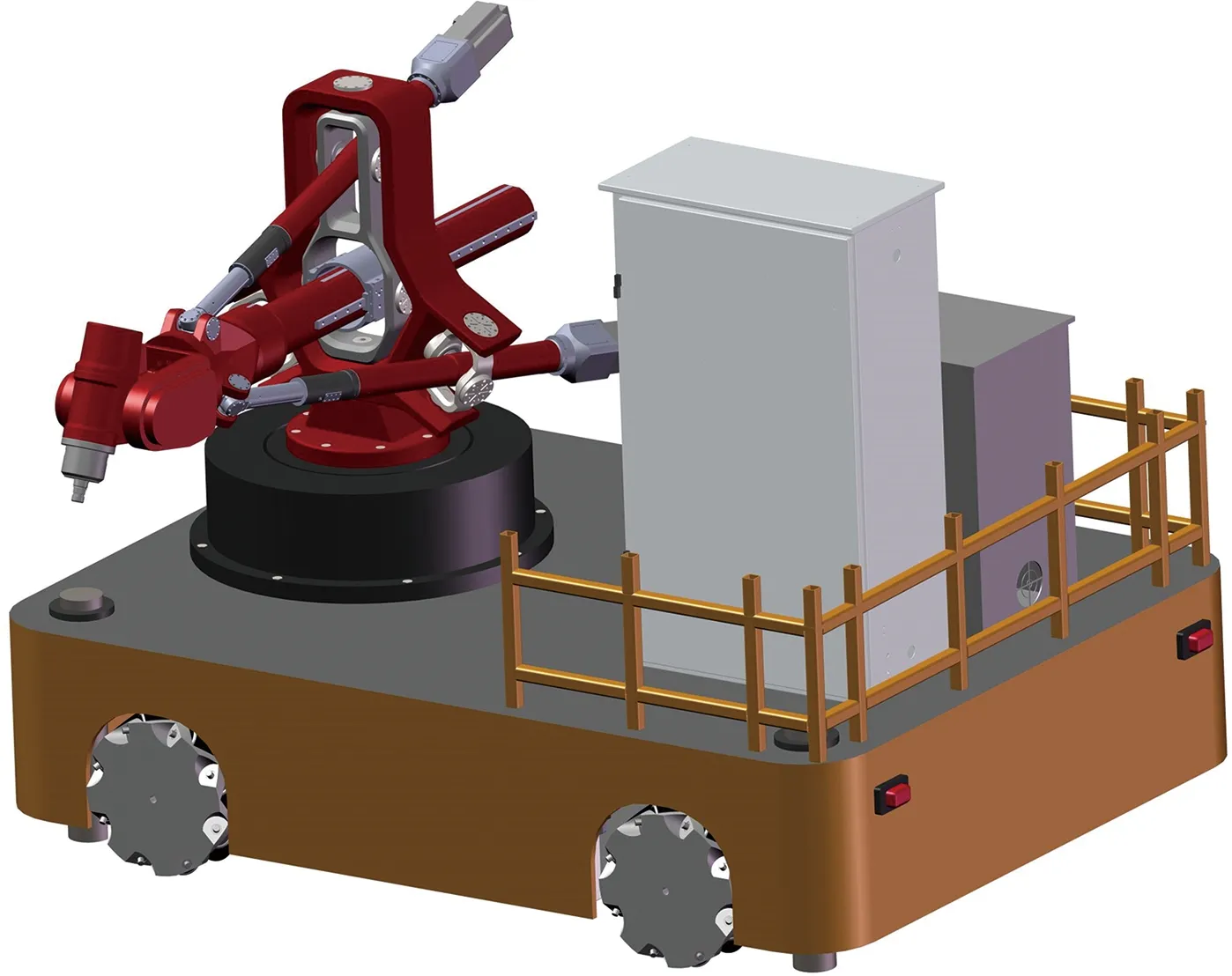
(b)搭载在全向移动平台上
4 结论
(1)本文应用平面机构的组成原理和约束特性,提出由一条串接一转动副的1T1R平面并联运动链和两条空间无约束主动支链组成的1T2R 新型并联机构拓扑结构综合方法,该方法具有简单直观、易于工程技术人员理解和掌握的优点。
(2)提出了动平台结构紧凑性准则,并统筹考虑装备位姿能力恰当性、支链结构力学合理性、机器人模块可重构性、位置正逆解简易性和动平台结构紧凑性等5项准则,完成1T2R并联机构拓扑结构优选及性能验证。
(3)在综合和优选出的1T2R并联机构末端串接A/C摆角头,发明出一种新型五自由度混联机器人。该机器人可继承Tricept机器人优点,且与Tricept机器人具有完全相同的运动学性能,两者绝大部分部件可互换。将其与长行程导轨或全向移动平台集成,可搭建出形式多样的机器人化作业单元和移动工作站。
