基于PLC的六自由度焊接机器人手臂设计与应用
2020-12-11董长福胡兴伟武升杰孙明军焦念刚
董长福 胡兴伟 武升杰 孙明军 焦念刚
摘 要:六自由度焊接机器人对于提高产品质量和企业竞争力有着重要意义,也是实验制造业自动化生产的重要手段。本文研究六自由度机器人关节分解和关节与工作件坐标系合并原理,阐述机器人手臂结构,通过PLC控制手臂关节运动,完成手臂位姿控制的任意性,从而完成操作工作。
关键词:焊接机器人;位姿;PLC
中图分类号:TH112 文献标识码:A 文章编号:1671-2064(2020)13-0067-02
0 引言
机器人技术的应用水平象征着制造能力的水平,是一个国家工业自动化水平的重要标志[1]。由于人机协作机器人所具有的感知能力、友好性、操作指向性强、轻量化等特点,被逐渐地运用到企业实际的生活生产中[2]。本文主要对焊接机器人手臂工作原理和PLC控制系统进行分析,保证本机构完全实现六自由度工作的前提下,保证安全生产与精准生产,提高生产效率。
1 焊接机器人位姿确认
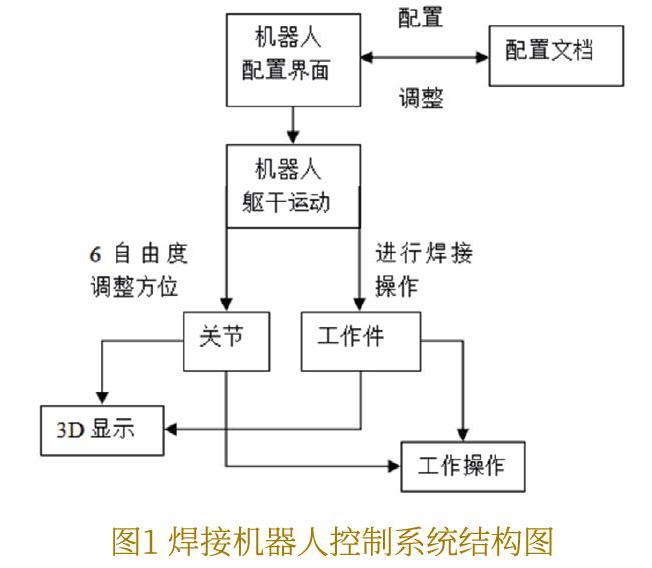
焊接机器人使用了PLC、传感器等技术,通过电机驱动等控制方法,使机器人根据操作者预输入的配置文档,通过调整机器人的躯干,协调各关节部位运动到合适位置,同时驱动焊钳和焊枪开始工作,完成指定操作工作,具体操作流程如图1。
要实现焊接机器人的躯干运动,六自由度的机器人手臂无疑满足了生产要求,六自由度的实现,即三个位移坐标和三个旋转坐标的实现,首先要确定机器人的工作件在空间坐标系中的位姿形态。
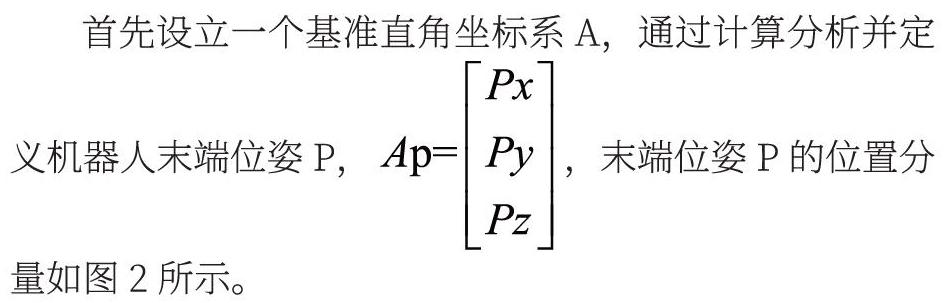
首先设立一个基准直角坐标系A,通过计算分析并定义机器人末端位姿P,,末端位姿P的位置分量如图2所示。
要确定焊接机器人的工作件位姿,必须联结机器人的刚性手臂坐标系。
焊接机器人工作件以外的刚性手臂依靠关节联结,在六自由度环境下不止一个关节,我们摘出一个关节i和邻近的前后关节为例说明机器人手臂坐标系位置图,如图3所示。
对于手臂坐标系的某一连杆来说,关节关系描述,包括连杆长度ai和邻近连杆扭角αi,如图3中展示,邻近连杆关节一般是刚性元件,可作出中轴线,线长即杆长ai,两线的夹角即扭角αi。
对于手臂坐标系的两连杆来说,运动关系描述,包括连杆夹角θi和距离di。如图3中展示,两关节的公垂线的夹角即连杆夹角θi,两关节的公垂线间的距离即距离di。
通过以上四个参数的确定,可以实现焊接机器人的六自由度描述,也就是说,当连杆i做移动运动时,di随着改变;当连杆i做旋转运动时,θi随着改变。
一般来说,六自由度机器人串联手臂机构坐标系的建立,应当满足以下条件[3]:
(1)设定其中一连杆i所处空间坐标系的原点,同时处于连杆i+1的轴线上,且為两关节轴线之间的公垂线与关节i+1轴线的交点;
(2)手臂系统中,所有连杆的关节轴线所处的位置应该与z轴处于一条直线上;
(3)串联手臂机构的对应关节公垂线的矢量方向始终为i,且指向关节为i+1;
(4)通过右手螺旋法明确Y轴方向。
经过矩阵求解,可以得到焊接机器人正运动学位姿参数方程:
si=sinθi; (1)
ci=cosθi; (2)
si+1,i-1=sin(θi+1+θi-1); (3)
ci+1,i-1=cos(θi+1+θi-1); (4)
公式(1)(2)(3)(4)即六自由度焊接机器人某一关节的正运动位姿。
2 弧焊机器人PLC位姿控制
可编程逻辑控制基本单元模块包括CPU、存储器,其作用包括存储数据,对数据进行运算,实现利用自动化技术远程控制机械电气装置的目的,主要优点包括强抗扰能力、自我检测和机电一体化的实现。
焊接机器人手臂PLC控制通过总线通信,输出多路PWM信号控制步进电机,调动关节,控制手臂的各个自由度。脉冲时间s参数由PLC实时变化,脉冲信号频率与步进电机的转速成正比,控制结构可以如图4所示。
以焊接机器人关机i为例,Ui与Ii形成步进电机的初始转速与工作后的时刻转速,U和i体现PLC的自我检测,作用是对信号修正,同时在操作台有复位按钮和限值调整按钮,更换算法,完成不同操作。
依照图4的结构,可以设计如下,以Xi_start、Xi_stop、Xi_current表示手臂关节的空间位置数据,经过计算得到Xi_result,若数据出现负值则取绝对值即手臂的工作运行距离,同时决定了杆件的扭转,即对应着图3中的di与θi。
在该焊接机器人手臂设计中,PLC主要是用来调整步进电机频率,即调节机器人手臂关节输出脉冲。自由度数目为6,推导可得输出脉冲R参数转换矩阵如式(5)所示。
(5)
其中,β为轴数,γ为谐波速度,si和ci对应式(1)和式(2),x0和y0对应基准坐标系。
在实际控制中,建立变换坐标系,以式(5)输出PWM信号对焊接机器人手臂进行逻辑控制。
3 弧焊机器人操作
弧焊机器人采用了交流伺服驱动技术、精度高且刚性优的RV减速机以及谐波减速器,同时采用了先进的智能控制技术,来控制串联手臂机构的协调性与位置姿态,弧焊机器人现场操作如图5。
4结语
本文把弧焊机器人作为分析对象,首先分析了六自由度弧焊机器人手臂的位姿形态、PLC位姿控制方式,并在实际操作中检验工作效果,最终结果表明,六自由度焊接机器人能够在配置文件PLC控制下完成手臂位姿控制,满足生产要求。
参考文献
[1] 万丰,许俊锋,吴佳.基于PLC的机器人手臂位置控制算法研究[J].仪表技术,2016(06):34-37+40.
[2] 王飞,晁智强,张传清,等.机器人手臂运动轨迹跟踪变导纳控制仿真[J].计算机仿真,2018,35(12):280-285.
[3] 肖爽.六自由度焊接机器人运动学及动力学研究[D].乌鲁木齐:新疆大学,2019.
Abstract:Six-degree-of-freedomwelding robot is of great significance to improve product quality and enterprise competitiveness, and is also an important means of automatic productioninexperimental manufacturing. In this paper, the principle ofsix-degree-of-freedom robot jointdecomposition and coordinate system combination between joint and work piece is studied, and the structure of robot arm is expounded.
Key words:robotic arm;posture;PLC
收稿日期:2020-06-09
作者簡介:董长福(1973—),男,山东济宁人,本科,技术员,研究方向:矿山机电产品的研究与开发。
通讯作者:胡兴伟(1988—),男,山东济宁人,研究生,研究方向:机械产品研发设计。
