基于Ansys Workbench分拣机械手爪的仿真与优化
2022-10-28郭北涛代国辉
郭北涛,代国辉
(沈阳化工大学, 辽宁 沈阳 110000)
早在20世纪50年代末,工业机器人在美国应运而生,随着时代的进步,工业机器人更是不断发展和完善,被广泛应用于各个行业。与人相比,工业机械人生产成本低,能在危险的环境中连续工作,也能重复完成单调的工作[1]. 为了降低工业机械人的生产成本,达到机械爪轻量化要求,需对机械爪进行优化设计。在传统的机械爪优化设计方案中,主要以实际工况测试为主,不仅大量损耗材料,生产周期也大大延长[2]. 如今随着计算机辅助设计(CAD)[3]、计算机辅助制造(CAM)[4-6]和计算机辅助分析(CAE)的快速发展,利用计算机的模拟仿真软件,对机械手进行仿真优化分析,从而大幅降低测试生产周期,缩减制造成本。
本文使用ANSYS 2020 R2中的DesignModeler模块建立机械爪三维模型,利用ANSYS 2020 R2中的Workbench对棒料分拣机械爪进行静力学特性分析,以验证其可靠性;并采用响应面法优化机械爪各个参数尺寸,得到最优解;最后利用拓扑优化对机械爪进行形状优化,减轻其质量,并进行静力学分析保证其可靠性[7].
1 建立机械爪三维模型
Ansys 2020 R2是由美国ANSYS公司推出的,比以往的版本更为强大实用,并且支持中文版。该软件创建并组装了一套软件程序,涵盖了整个物理领域,可以轻松地满足设计人员和分析师的使用需求。
本文以棒料分拣机械手的单只机械爪为研究对象,图1为棒料分拣机械手的三维模型。单只机械爪模型在DesignModeler模块中建立,可以省去其他软件如SolidWorks等与ANSYS进行关联并进行参数化设置的繁琐步骤。对机械爪模型进行有限元分析时,先将机械爪三维模型简化[8-9],简化后的机械爪模型见图2.

图1 分拣机械手三维模型图

图2 简化后机械爪模型图
2 机械爪静力学分析
2.1 网格划分
进行静力学特性分析时,先将材料设置为不锈钢,其参数为密度 7.85×103kg/m3,泊松比为0.3,弹性模量为206 GPa,屈服强度为450 MPa.
良好的网格划分能够提高有限元分析的精准度[10-14],但网格数量增加也会加大计算机计算负担,本文网格划分单元格尺寸设为2 mm,其他默认,这样既保证网格划分的精度,又减轻计算机计算负担。网格划分后单元共计34 270个,节点共计63 102个,见图3.

图3 网格划分图
2.2 施加载荷与约束并求解
根据实际工况,对机械爪连接板施加固定约束。夹取工件质量为20 kg,经计算得出机械手所需夹紧力为1 500 N,故在机械爪前端板施加1 500 N的力,见图4. 对机械爪总变形与总应力进行求解,求解后应力云图见图5,应变云图见图6,最大变形为0.034 562 mm,最大应力为21.208 MPa.

图4 施加力示意图

图5 应力云图

图6 应变云图
3 响应面法优化
由云图可知,机械爪变形量仅为0.03 mm,且最大等效应力远小于材料屈服强度,有很大优化空间,现采用响应面法对机械爪进行优化。
响应面法是对选定的试验点进行实验设计,从而建立所需求解的目标函数模型,进而通过响应面模型得出其余点的响应值[15]. 此方法不需要了解系统内具体函数关系,只要确定输入与输出的对应关系,就能正常求解分析[16].
3.1 设计变量的确定
选取支撑板、前端板、连接板的厚度为变量,表1为各变量的变化范围。

表1 设计变量变化范围表
3.2 响应面模型的建立
在响应面模型建立之前,要对变量进行实验设计,建立所需样本点。以最少数值计算求得全面的实验结果,这样能有效提高计算效率。本文采用中心复合实验设计法(CCD),经计算得出15组样本点,数据见表2.

表2 样本点数据表
ANSYS Workbench中有6种响应面拟合的方法,本文选用克里金(Kriging)拟合法。克里金拟合法适用于非线性工程优化问题,它能细化输入的设计参数,并生成对应的细化点,将细化点分配到最需要改进的地方,保证了优化质量[17-19]. 在使用决定系数对响应面拟合精度进行评估时,克里金拟合法的3个输出参数的决定系数均为1,见图7,达到最佳拟合效果,故选用克里金拟合法合理。

图7 克里金拟合法的决定系数值图
ANSYS Workbench通过克里金拟合法建立的响应面如下:P1(连接板厚度)、P2(前端板厚度)与P5(最大变形)及与P6(最大应力)关系见图8、9,P2(前端板厚度)、P3(支撑板厚度)与P5(最大变形)及与P6(最大应力)关系见图10、11.

图8 P1、P2与P5关系图
由图8可以看出,前端板厚度P2与总变形P5成正相关,而连接板厚度P1却对总变形P5没有影响;由图10可以看出,支撑板厚度P3与总变形P5成正相关,但相关性不大。而且最大应力、总变形对应的点分布在对角线上,说明预测值与观测值拟合良好,因此建立的实验点非常合理,满足优化的精度要求[20].

图9 P1、P2与P6关系图

图10 P2、P3与P5关系图

图11 P2、P3与P6关系图
3.3 多目标优化
设计变量与输出参数灵敏度关系图见图12,通过灵敏度直方图能直观地看出哪个设计变量对输出参数影响最大,从而将其作为优化目标进行优化。零件的质量、最大等效应力、总变形受前端板厚度P2的影响最大。而连接板厚度P1对最大应力、总变形影响几乎为零。

图12 设计变量与输出参数灵敏度关系图
为满足机械爪轻量化要求,现以机械爪质量最小、总变形最小、最大等效应力最小作为目标函数,利用MOGA(多目标遗传算法)进行最优解筛选,MOGA算法是基于NSGA-Ⅱ算法的变体[21].初始样本数为3 000,每次迭代的样本数设置为1 000. 收敛标准为80%,最大迭代次数为50,最大候选点数为3. 经过9 923次迭代后目标函数收敛,得到3个候选点,见表3.
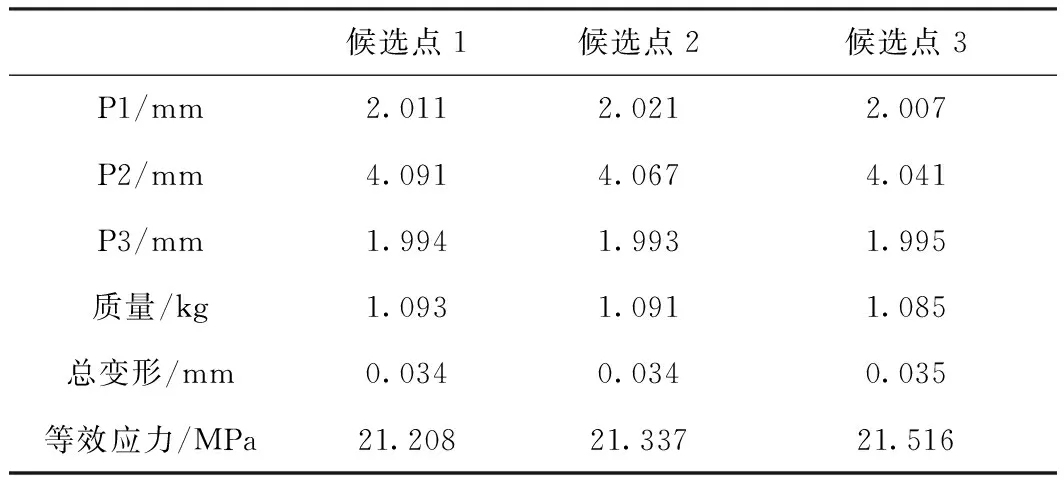
表3 候选点数据表
选取候选点3作为优化后的尺寸,圆整后尺寸与原始尺寸对比见表4. 其中连接板厚度P1减少了60%,前端板厚度P2减少了20%,支撑板厚度没有变化,在满足工况要求的情况下总质量减少了27.67%.

表4 优化前后尺寸对比表
4 拓扑优化
基于响应面法优化后的参数进行拓扑优化,实际就是机械爪的形状优化[22],在满足机械爪工况要求下得到材料的最优组合方案。
4.1 参数设置
将响应面法优化后的模型导入Workbench中,材料为不锈钢,网格划分尺寸大小为2 mm,施加载荷和约束后,求解总变形与等效应力。随后导入Topology Optimization(拓扑优化)模块,关联静力学分析的参数设置及分析结果。优化目标设置为质量最小,相应约束为全局等效应力最大为50 MPa,优化区域与排除区域见图13.
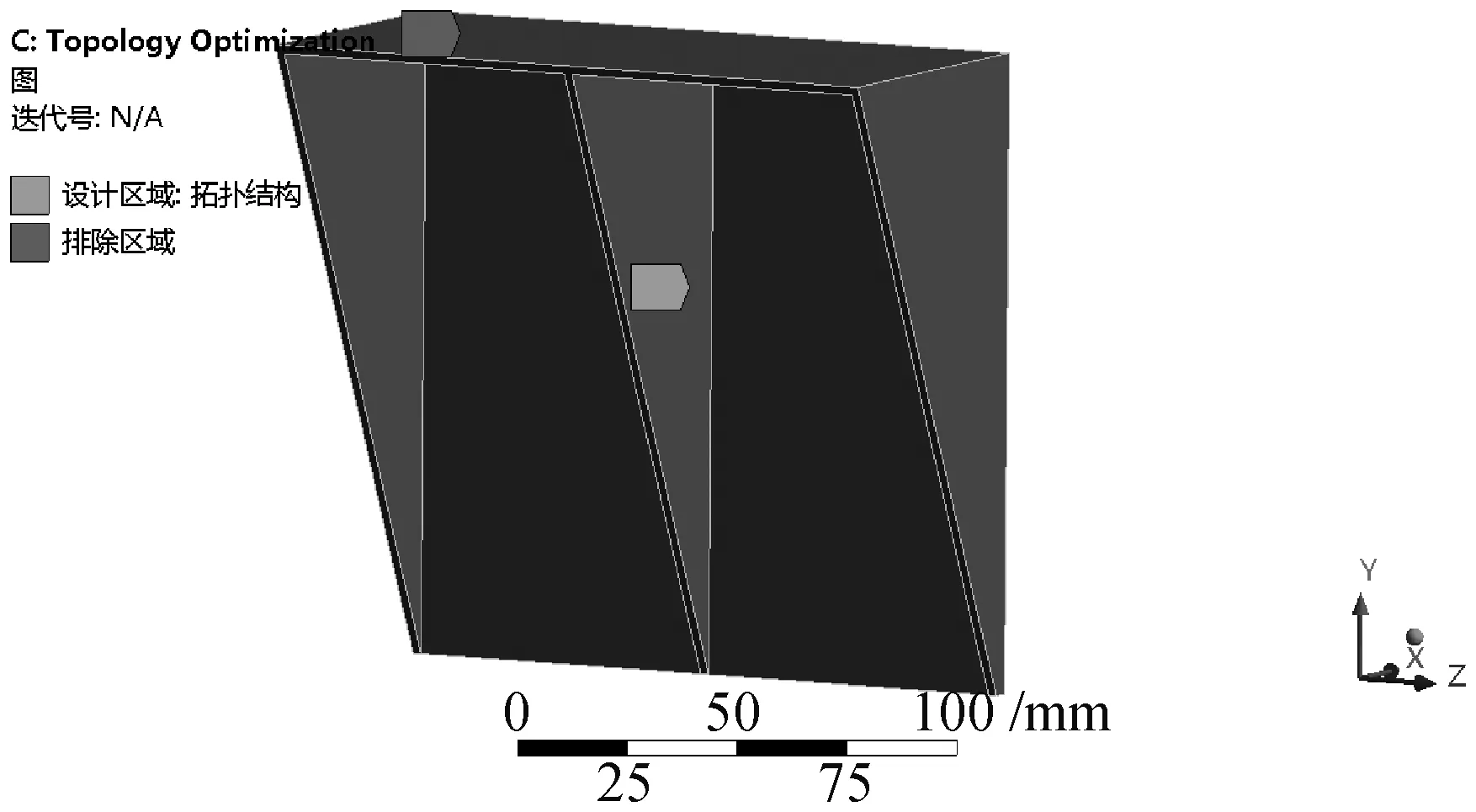
图13 拓扑优化区域图
4.2 优化结果
经过146次迭代计算,拓扑优化后模型见图14,修整后模型见图15. 将修整后模型进行静力学特性分析,得到的应力云图见图16,应变云图见图17. 由图16可以看出,最大应力为59.703 MPa,相比优化前有所增加,但仍小于材料屈服强度,总变形也较小,故拓扑优化后的机械爪仍满足工况要求。拓扑优化后模型质量为0.910 kg,相比优化前减少了16.13%,达到了机械爪轻量化目标。

图14 拓扑优化后模型图

图15 修整后模型图

图16 拓扑优化后应力云图

图17 拓扑优化后应变云图
5 总 结
以棒料分拣机械手的机械爪为研究目标,通过Ansys Workbench静力学模块分析验证了机械爪的可靠性;后利用响应面法,以机械爪的连接板、前端板、支撑板厚度为设计变量进行优化设计,再利用得到的15组数据进行多目标优化,最终计算出3个候选点,机械爪质量减少了27.67%;最后利用拓扑优化对机械爪进行形状优化,质量再次减少16.13%. 总质量共减少了43.8%,实现机械爪的轻量化,节约了生产成本。
