Blue View 5000型三维成像声呐在桥梁墩柱结构水下检测中的应用
2022-10-14蔡林桓
蔡林桓
(武汉长江航道救助打捞局,湖北 武汉430014)
1 绪论
1.1 引言
近年来我国基础设施建设速度迅猛,桥梁作为交通运输的重要组成部分,在经济发展中起着非常重要的作用。桥墩基础是桥梁结构的主要承重构件,与桥梁结构耐久性直接相关,水下桥墩基础属隐蔽工程,容易受到水流冲刷、漂流大块石或过往船只的碰撞等不确定因素影响,由于水流的长期冲刷可能会导致桥梁桥墩周围泥沙被掏空或桩基外露,从而产生安全隐患,因此需探明桥梁墩柱的水下状况,为桥梁的运营提供依据。本文依托某工程为研究背景,基于Blue View 5000 型三维成像声呐技术,探寻三维成像声呐在桥梁墩柱结构检测中的应用。
2 三维成像声呐
Blue View 5000 型三维成像声呐系统又可以称为水下三维全景成像声呐系统,每次发射上百个波束形成一个扇面,通过云台的水平旋转(Pan)和倾斜变化(Tilt)实现空间场内点云数据的获取。Blue View 5000 声呐可用于水底地形,水下建筑、结构的高分图像生成,该设备设计紧凑,体积小便于在各种平台上安装,且操作简便,一键成像,可根据需求生成扇形扫描或者球面扫描的水下三维点云图像。
2.1 三维成像声呐的系统组成
三维成像声呐系统(BV5000)主要由软件和硬件两个部分组成。硬件部分主要由数据传输线缆、甲板单元、云台、换能器四个部分组成,主要硬件展示如图1。而软件主要使用仪器开发团队提供的BlueViewer 和Proscan 和leica 的Cyclone 点云处理软件。

图1 BV5000 硬件示意图
2.2 三维成像声呐的工作原理
三维成像声呐系统(BV5000)主要依据声学测距的方式水下目标到声呐的距离。在BV5000 工作时,首先由水声换能器发射一组声波,产生一个固定方向角的扇形扫描区域或者球形扫描区域,当声波到达目标后发生反射,返回的信号被换能器接收,再转变为电信号的形式将信息传给甲板单元和控制终端。终端对接收的信号进行处理和分析还原出反射目标的相对空间坐标,然后在显示器上通过点云图像来反应。BV5000 在45°-360°的扫描区域均匀发射256 个波束,然后通过云台在水中的旋转来获取待扫测区域的三维点云图像。

表1 三维成像声呐相关技术参数
2.3 检测方式
本次桥墩扫测的总方案为:通过三维图像声呐对涉水墩台水下部分进行多站扫测,对扫测图像进行拼接分析,获得水下墩柱形态及冲刷情况。
BV5000 声呐系统有效探测范围为30 m,为获得结构物体或整个区域内的三维图像,通常需设立多个扫描测站,从不同的方位进行观测,获取若干幅扫描图像,然后经过拼接形成一个完整的目标物。一般根据检测目的、目标物形状、尺寸设置一个或多个测站,最后通过数据处理完成图形的拼接。
对桥墩区域附近的水流的流速及流向等数据进行现场采集,结合作业点位布置声呐平台,以不危害桥墩安全为首要原则,保持足够的距离,或靠近柔性接触,根据各个墩台的形态特点,以及三维成像声呐的扫测原理,在每个桥墩周围布设4 个扫测点,扫测点示意图如下。
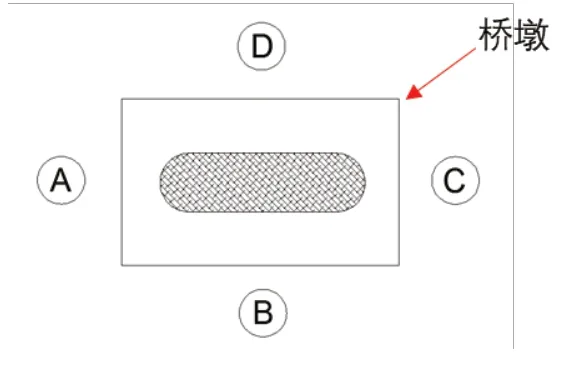
图2 三维图像声纳测点布置示意
三维成像声呐系统对桥梁桥墩进行全方位的检测,通过远程控制软件来控制其开始扫测。根据点位情况的不同,扫测时选择不同的角度,确保不能遗漏任何目标
物[6]-[7]。
3 应用实例
3.1 工程概况
某大桥全长7370m,中心里程为k32+821,以(60+100+60)m,连续梁上跨在建汉鄂快速通道。汉鄂快速通道该段设计为桥梁,道路与线路大里程夹角为28.6°道路设计宽度26m,路面设计标高22.5m。箱梁横截面为单箱室直腹板,箱梁顶板宽12.2m,厚48 cm,底板宽6.0m,底板厚由跨中的38 cm 按圆曲线变化至中支点梁部的97.6 cm,中支点处加厚到140cm,腹板厚分别为45,60,90,100 cm;端支座处及边跨直线段和跨中心处梁高为4.53 m,中支点截面中心处梁高6.83m,梁高按圆曲线变化,圆曲线半径R-488.546 m;全桥共设5 道横隔梁,分别设于中支点、端支点、和中间跨跨中截面,中支点处设置厚2.5m 的横隔梁、边支点处设1.45m 厚的端隔梁、跨中合龙段设厚0.4m 的中横隔梁,横隔梁设有孔洞,供检查人员通过。本项目针对涉水的3 座桥墩,对其进行检测,查明其结构病害和破损情况。
3.2 桥梁墩柱结构检测流程
三维图像声呐对桥梁墩柱结构检测流程如图3所示:
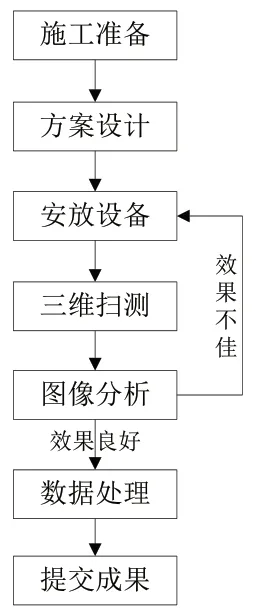
图3 水下墩柱扫测流程
首先,施工前需要对三维成像声呐进行调试确保设备在施工现场能够正常工作,根据桥墩形状设计声呐布设点位,具体方案如图3,然后根据设计的方案将三维图像声呐放入水中,待仪器稳定后开始扫测,三维图像声呐可以当场进行简单判读,检查墩台水下部分有没有出现破损情况,如果发现有该情况,则记录位置,大概尺寸等相关数据,后期定量分析进行重点关注。
三维点云数据的拼接建模,是数据处理最烦琐、难度最大的过程。首先要根据各个测站的位置,寻找相邻测站的同名目标。同名目标的质量和数据量决定了拼接建模的精度和效果。选定同名目标时,应当选择清晰、完整的目标,并进行准确的框选。数据处理拼接软件会根据同名目标采用最小二乘法对点云数据进行加权误差分配,形成两站间三维点云数据的拼接建模。
最后采用三维软件中量具对结构的尺寸进行测量,与设计尺寸进行校核,以确保正确判断桩基缩径病害。
3.3 桥梁墩柱结构水下检测
通过对三维点云数据拼接建模后形成的效果图如下:
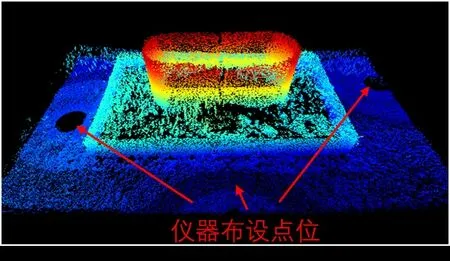
图4 三维图像声呐扫测效果图
从图5可以看出三维成像声呐生成的点云图像,通过高层分层设色的方法,可以清晰地反应桥梁桥墩、承台在水下的具体状况,以及桥墩附近河床的是否存在冲刷或淤积现象。

图5 某涉水桥墩三维点云图(侧视图+俯视图)
3.4 三维成像声呐检测结果分析
通过三维点云数据进行分析,三维图像声呐在桥墩检测中可以达到如下效果:
(1)能够反映桥梁墩柱在水下的真实结构,能够查明墩以及承台外露部分结构是否完整,有无混凝土破损。
(2)能够对墩以及承台外露部分结构进行测量尺寸,如出现大面积混凝土破损能够进行定位,并进行尺寸量测。
(3)能够对桥墩附近河床地形进行探测,查明有无局部冲刷、淤积等现象。

图6 三维成像声呐墩柱水上水下效果结合图
4 总结
综上,三维成像声呐系统能够直观的获取水下桥墩的结构,高分辨率的点云数据清晰直观,具有可量测性,能够很好地解决涉水桥墩处于水下,隐蔽难以探查的难点,同时能够对桥墩附近河床地形进行探测,查明有无局部冲刷、淤积等现象,为桥梁运营维护提供数据支撑。