永磁同步电机伺服控制(连载之一)国内外研究现状与发展趋势概述
2022-10-12黄依婷王云冲陈毅东沈建新
黄依婷,王云冲,2,史 丹,2,陈毅东,沈建新,2
(1.浙江大学 电气工程学院,杭州 310027;2.浙江省电机系统智能控制与变流技术重点实验室,杭州 310027;3.深圳市兆威机电股份有限公司,深圳 518000)
0 引 言
随着电力电子技术、电机设计理论及制造技术、控制以及计算机学科的发展,伺服控制系统的应用越来越广,例如,近年来被逐渐推广到了数控机床、工业机器人、电子制造等诸多高精尖领域,与此同时,3C产业的迅猛发展也使得小型伺服得到了更多的应用。
国务院发布的《中国制造2025》国家行动纲领中指出:工控核心部件的国产化是提高智能制造水平、完成制造业转型的第一要务,其中数控机床、工业机器人和新能源汽车是工业界的重点攻关领域,要加快突破伺服驱动器等关键零部件的技术瓶颈[1-2]。所以,随着我国制造业的升级,伺服控制系统也将会得到长足的发展。
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)相比于异步电机而言,具有高效率、高功率密度、高功率因数以及优越的控制性等优势,故以其为执行元件的交流伺服系统逐渐成为工业界的主流,同时也是学术界的研究热点,人们对该系统抗扰性、快速性以及鲁棒性等性能的要求也随之变得越来越高。本文从永磁同步电机伺服控制系统的发展历程、国内外研究现状和未来的发展趋势等几个方面进行综述。
1 永磁同步电机伺服控制系统的总体结构和发展历程
伺服系统的发展经历了漫长的岁月。20世纪60年代以前是液压伺服系统的兴盛期,而后,伺服系统逐渐向电气化演变。60、70年代直流伺服系统全面发展,但直流电机存在换向火花的问题,制约了它的应用。交流电机相较于直流电机而言有不存在换向火花、惯量小、结构简单等优势,故80年代开始交流伺服系统迅猛发展,至今,绝大部分的伺服系统都采用交流伺服系统[3-4]。
交流伺服系统的执行元件主要有两种:异步电机和同步电机。相比之下,前者功率因数较低、自身的机械特性较软,且其转子电阻会随着温度的变化而变化,影响矢量控制时磁场定向准确性,故目前交流伺服系统的执行元件多采用同步电机。相比于电励磁同步电机,永磁同步电机的功率密度和效率更高,所以,随着越来越多高性能永磁材料的出现,永磁同步电机逐渐成为近年来的焦点,永磁交流伺服系统也随之成为研究热点,被应用到了工业控制、办公自动化、智能家电等诸多领域中[5-6]。
图1为永磁交流伺服控制系统的基本框图。图中,θref和θ分别代表电机转子机械位置角的给定和实际机械位置角;nref与n分别为转速给定和实际转速;iqref和idref分别代表PMSM的交直轴电流给定值;iq、id分别表示PMSM的交直轴电流实际值;ia、ib、ic代表PMSM的A、B、C三相电流;udref和uqref分别为两相旋转坐标系内直轴(d轴)和交轴(q轴)上的给定电压;uαref和uβref分别为两相静止坐标系内α与β轴上的给定电压。
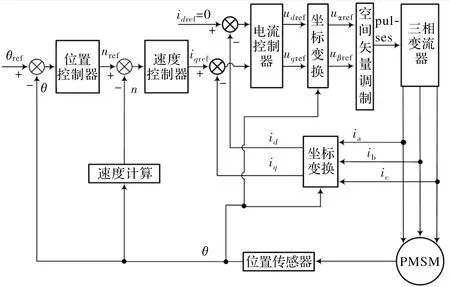
图1 永磁同步电机伺服控制系统基本框图
永磁交流电机的位置伺服系统包括电流环、速度环与位置环在内的三闭环控制(当然,在位置伺服系统中,也有采用双闭环结构的,即位置外环与电流内环。在转速伺服系统中,通常是转速外环与电流内环。甚至还有电流单闭环的,即转矩伺服系统。图1所示的三闭环系统是典型的控制结构,双闭环或单闭环可以视作三闭环的简化。),三环之间紧密耦合,内环会影响外环的性能,故为了提高系统整体的性能,针对这三个环节,国内外众多学者都做了大量的研究,下一节将对其国内外研究现状作详细介绍。
2 永磁同步电机伺服控制系统国内外研究现状
2.1 电流环研究现状
电流环作为伺服系统的最内环,需有较快的动态响应和较高的控制精度,它制约了外环的响应速度,其控制性能的优劣直接影响整个系统的性能,故很多学者都致力于研究如何改善电流环的性能。
在两相旋转坐标系中,PMSM的数学模型如式为
(1)
式中,uq、ud为定子电压的交直轴分量,Ld、Lq分别为直轴与交轴同步电感,Rs为定子电枢电阻,ωr为电角速度,ωm为机械角速度,ωr=pωm,p为磁极对数,Ψf为永磁体励磁磁链,Bm为粘滞摩擦系数,J为系统转动惯量,Te为电磁转矩,TL为负载转矩,Tf为静摩擦转矩。
由式(1)可知,永磁同步电机id=0控制策略仅实现了交直轴电流之间的静态解耦,不能消除它们之间的动态耦合关系(如图2所示),这种耦合关系会使得电流环的控制精度在电机转速上升时下降,动态响应变慢,同时增加电流响应的稳态纹波,加剧转矩脉动,故动态解耦问题始终是电流环的研究热点之一[7]。
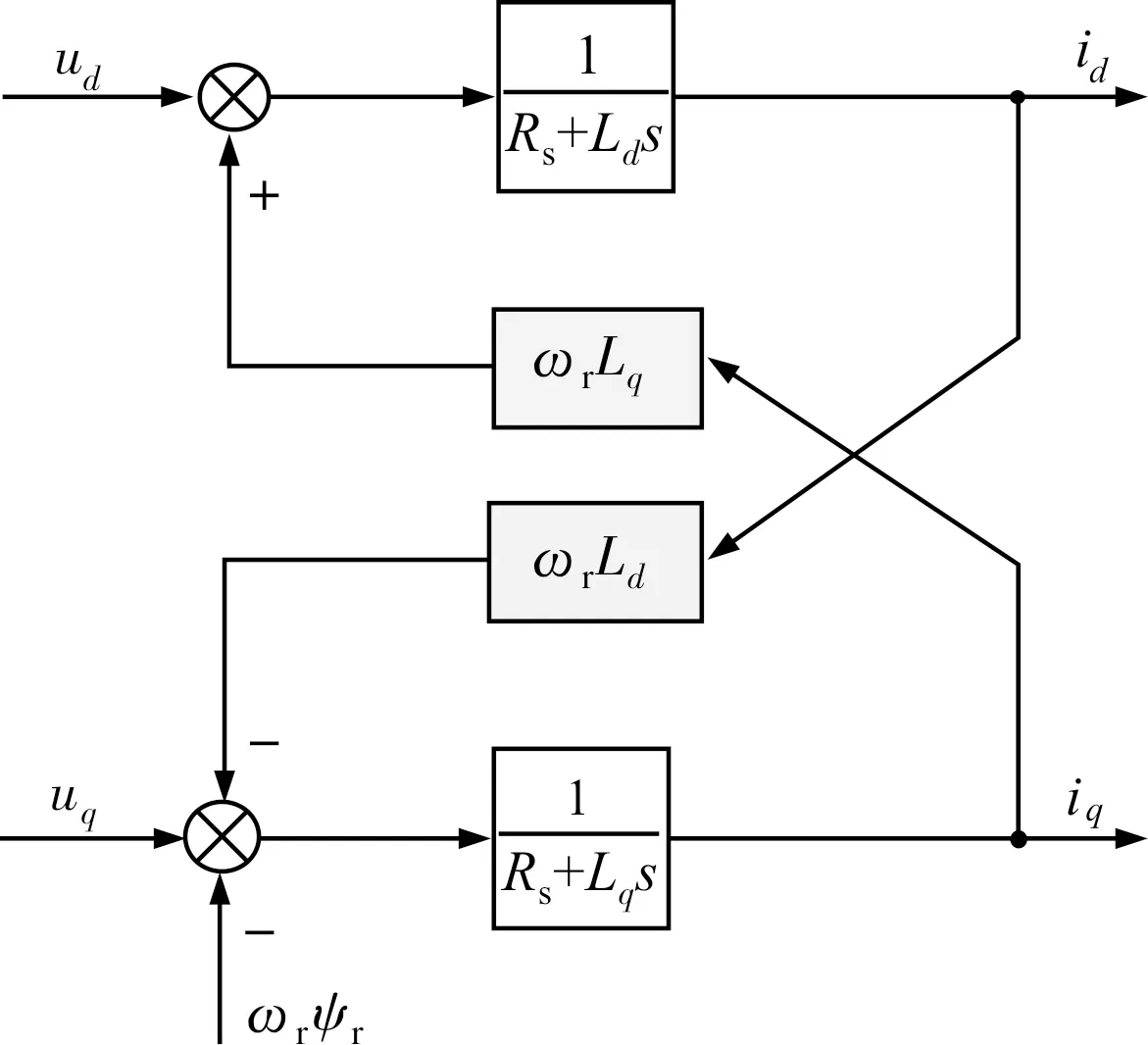
图2 永磁同步电机交直轴电流动态耦合
随着人们对电流环性能要求的提高,出现了越来越多的解耦策略,如图3所示。

图3 电流环动态解耦策略
其中,最常用的解耦策略是电流反馈解耦,它将耦合影响通过前馈的方式抵消[8],但该方法依赖于电机模型参数的准确性,若控制过程中电机的电感、磁链等参数发生变化,其解耦效果就会变差[9-10];复矢量解耦控制通过在传统PI控制器的基础上增加一个随转速动态变化的零点,来实现闭环系统的零极点对消,以消除耦合的影响,它拥有良好的解耦效果,并具有一定的参数鲁棒性[11-14];偏差解耦控制将交叉耦合控制与直接控制相结合,在实现解耦的同时,解决了前者低速时控制效果差的问题,且其相较于电流反馈解耦方法而言,对于模型参数的精度要求更低,鲁棒性更强[15-17]。但文献[18]指出传统偏差解耦控制策略的效果仍在一定程度上依赖于模型参数的准确性,故在其基础上引入干扰观测器,把观测到的由id、iq耦合和参数变化导致的电压误差反馈到输入端,以抵消动态耦合与参数误差的影响,进一步降低解耦策略对参数精度的依赖性。文献[19-21]将源于化工行业的内模控制引入电流环中,该控制方式也具备一定的解耦效果,且其控制参数可由期望的闭环带宽直接计算得出,省去了PI控制器反复调参的步骤[15,22-23],降低了设计者的工作量。
此外,为了降低电机运行时的转矩脉动,除了动态解耦以外,还有学者提出了一些其它方法来降低电流环电流响应的谐波含量。文献[24]在模型预测转矩控制的基础上引入改进的模型预测电流控制,显著减小了稳态时的电流谐波,降低了转矩脉动;文献[25]利用根轨迹分析了电流环带宽对稳定性的影响,并使用二自由度PI控制,加快了电流环的响应收敛速度,以避免电机高速运行时电流响应出现持续低频振荡的现象。
2.2 速度环研究现状
传统的PI控制以其原理简单且易于实现的优势早年在伺服系统中得到了广泛的应用,但它依赖于被控对象数学模型的精确性,控制性能受运行工况或电机参数变化的影响较大,无法满足现今对高性能伺服系统的要求。所以,将模糊控制[26-31]、滑模控制[32-36]、自适应控制[37-40]等各类现代控制策略单独或互相结合应用到伺服系统的速度环中,以改善速度的动态响应性能,增强其鲁棒性和抗扰性[41],逐渐成为近年来的研究热点,同时,高性能处理芯片的出现也使得这些复杂的控制策略得以应用到实际伺服系统中[42]。
如图4所示,现代控制算法包括自适应控制、智能控制和变结构控制[43]等多种控制方案。
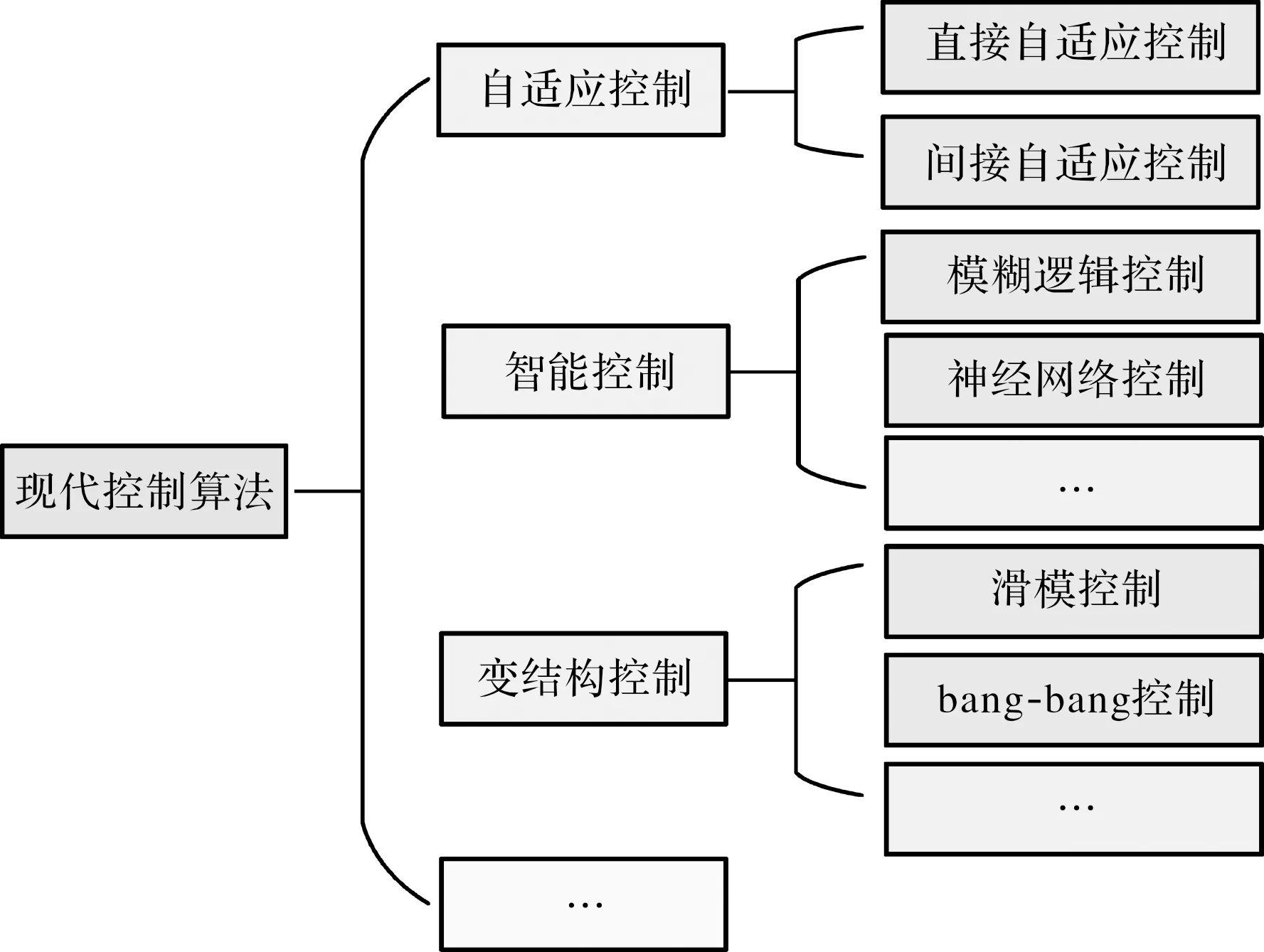
图4 现代控制算法简要分类
其中,自适应控制方法对参数变化具备较强的适应能力,它分为直接和间接自适应控制。直接自适应控制通过计算误差直接调整控制增益,多用于线性控制系统;间接自适应控制利用辨识得到的系统参数间接调整控制增益,设计思路较为简单。文献[44]设计了一种离散时间自适应速度控制器,利用最小二乘法辨识机械参数,实现间接自适应控制,该控制器能够在系统参数出现较大变化时保持优良的控制性能,具备较强的鲁棒性,但其参数辨识的计算量较大,受处理器计算能力的限制,收敛需要一定的时间,对于速度响应的快速性有一定影响。
随着人工智能技术的发展,智能控制也逐渐成为伺服系统的研究热点[45-46]。模糊逻辑控制(Fuzzy Logic Control, FLC)是实现智能控制的途径之一,它不涉及系统精确的数学模型,作为一种鲁棒性较强的控制方案,广受国内外专家学者的青睐。上世纪60年代,Zadeh率先提出模糊集合的概念[47],为模糊控制的发展奠定了理论基础,而后,新竹清华大学的Liaw、Wang[48]和纽芬兰纪念大学的Uddin等人[49]分别将依据实际工程经验设计的FLC应用到异步电机和永磁同步电机的调速系统中,使得系统拥有更强的鲁棒性和抗干扰能力,可以适应不同的运行工况。文献[28、31]将自适应模糊逻辑控制和粒子群优化等智能化方案,应用到PMSM的直接转矩调速系统中,有效地降低了磁链和转矩脉动,改善了速度动态响应性能。
如图5所示,实现模糊逻辑控制的方案有两类:根据模糊理论在线调整PI参数,构成模糊PI控制器或直接用模糊控制器替代PI控制器。
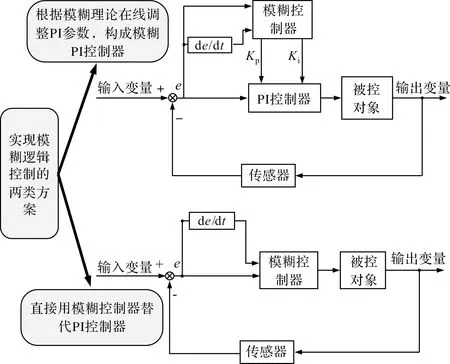
图5 模糊逻辑控制算法的两类方案
文献[42]采用前者,利用速度误差及其变化率,根据模糊规则库实时调节PI参数,有效地提高了系统的响应速度及稳定性,减小了超调,但PI参数的调整涉及多个规则库,需占用较大的CPU存储空间,且程序运行时间较长;而文献[50]利用自适应模糊逻辑控制器(Adaptive Fuzzy Logic Control, AFLC)替代传统的PI控制器,改善了速度的动态响应性能,且只涉及一个模糊规则库,设计过程较为简单,占用的存储空间较小。与此同时,该文还利用速度误差自适应调整FLC的输出比例因子,以进一步增强其鲁棒性,减小稳态时输出电流中的谐波含量。
2.3 位置环研究现状
伺服系统现多用于高精尖领域,若其位置响应出现超调,则有可能损坏工件,引发安全事故,或降低控制性能。故为了将位置环矫正成典I系统,令系统响应接近临界阻尼,不出现超调,位置控制器通常采用比例控制器[51]。但比例控制器系数的选取与系统参数有关,单纯的比例控制器鲁棒性较差难以满足高性能伺服系统的要求,故在位置环中采用各类现代控制策略也同样成为近年来的热点。
文献[52]将模糊控制与比例控制相结合,设计了PI-模糊混合控制器以加快位置响应的速度,但该混合控制器有多种控制模式,需要额外确定不同控制模式的作用切换时间,设计较为繁琐。
变结构控制以其鲁棒性较强的优势,近年来也受到了很多的关注。它最早在上世纪中叶由Emelyanov提出[41],由继电器控制发展而来,它包含多种控制方法,如图6所示。滑模控制(Slide Mode Control, SMC)属于变结构控制的一个支系,它通过滑模面两侧的不连续控制使系统的相点沿预先设计好的滑模面运动,当相点位于滑模面上时,系统的响应不会受内部参数变化和外部扰动的影响,具有较强的鲁棒性,故该控制方式在高性能伺服系统中有着广泛的应用[53-56]。
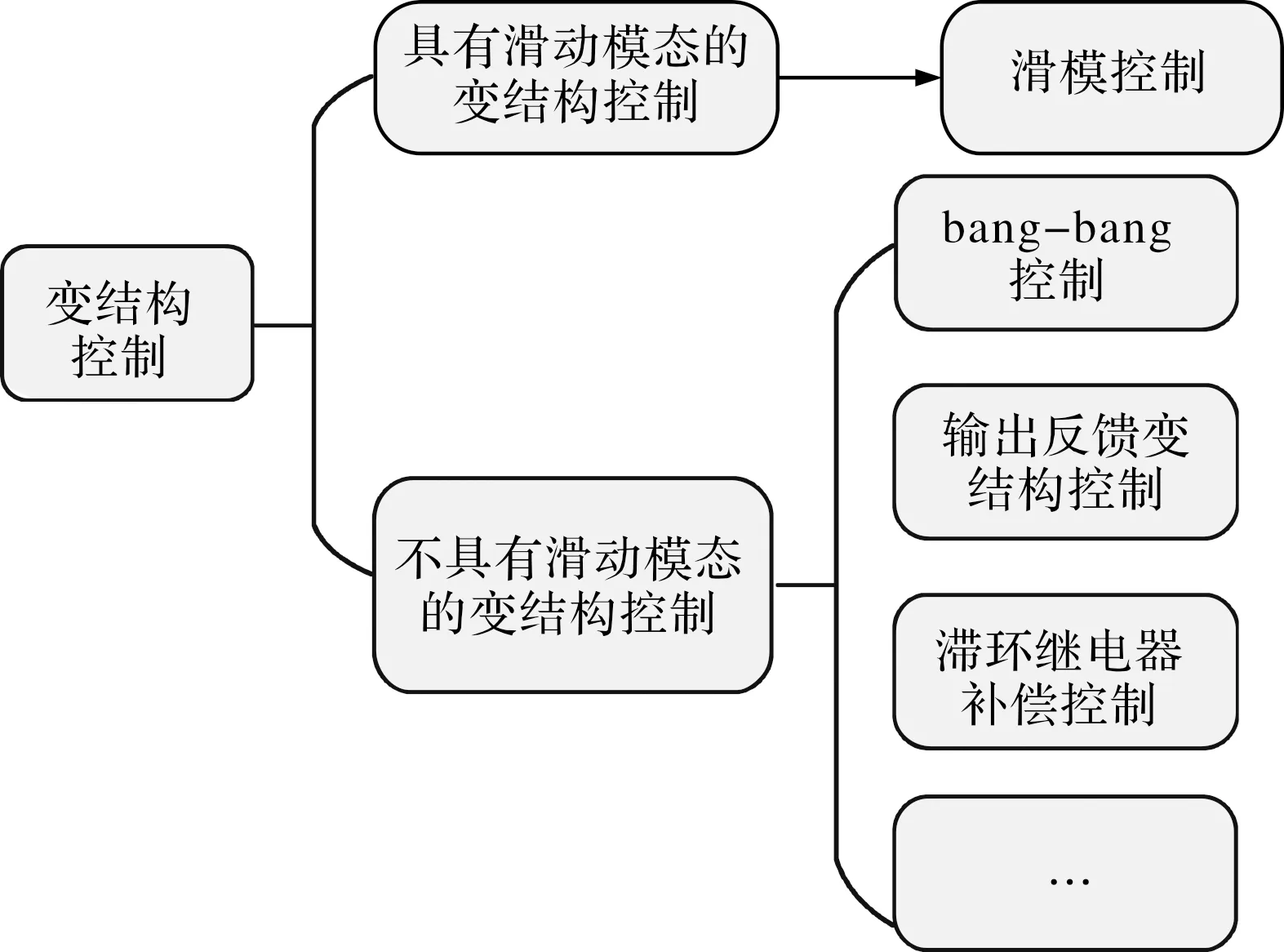
图6 变结构控制的简要分类
传统滑模位置控制器对应的系统只包含两个闭环——位置环与电流环,SMC的输出为电流给定,这样的设计会导致系统失去对速度的控制能力。为解决该问题,有学者提出将SMC的整个控制过程分为速度和位置两个控制阶段,每个阶段采用不同的滑模控制方法,并在前一阶段将速度波形设计为梯形或指数形式,以满足速度控制的需要[33,57],但该方案涉及多个滑模面。所以,为了在滑模位置控制器结构较为简单的前提下保证系统对电机速度的控制能力,可将SMC应用到包含位置、速度、电流三个闭环的PMSM伺服控制系统的位置环中,令其输出为速度给定,直接传递到设计好的速度环中,以保证速度响应的性能。
一般的滑模控制采用线性滑模面,系统的相点在接近平衡点时,收敛速度会变慢,具有无限时间收敛特性;而采用终端滑模面的系统,其相点在到达滑模面后,将在有限时间内收敛到零,故它作为一种非线性的滑模面在滑模控制伺服系统中得到了广泛的应用[58]。文献[59]设计了一种采用积分终端滑模面的滑模控制器,并将其与状态观测器相结合,应用到了位置伺服系统中,实验证明该系统位置响应速度更快,且有着更强的鲁棒性与抗干扰性。
由于滑模控制的不连续性,滑模运动存在抖振问题。为了削弱抖振,提高位置响应的稳态精度,学者们做了大量的研究工作,如图7所示,目前主流的几种削弱抖振的方法有:边界层法、趋近律法以及高阶滑模控制法[60]。鉴于边界层法的边界层宽度较难确定,且会在一定程度上牺牲SMC的抗扰性能,而高阶滑模较为复杂,涉及多阶导数,故很多学者选择趋近律法来抑制抖振,其中有学者通过采用连续的趋近律来替代不连续的趋近律,在一定程度上解决了常规滑模控制器的抖振问题[59]。
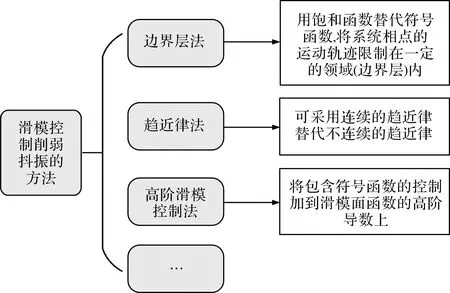
图7 滑模控制削弱抖振的方法
国内外众多学者都对于改善永磁交流伺服系统的性能付出了大量的心血,国外一些知名企业如西门子、安川、科尔摩根等早在上世纪就推出了交流伺服驱动产品。而我国伺服驱动产业起步较晚,目前,一些国内知名企业如汇川、固高等也都相继推出了一系列性能较为优良的伺服驱动产品,但由于总体发展时间较短,其性能依旧落后于国际先进水平,还有很大的发展空间。下一节将简要介绍永磁同步电机伺服控制系统的未来发展方向。
3 永磁同步电机伺服控制系统发展趋势概述
总结来说,永磁交流伺服系统未来的发展趋势可归为以下几个方面:
(1)数字化
近年来,DSP、MCU的功能不断完善、价格不断下降,越来越多的芯片支持浮点运算,用户可快速编写程序而不受定点运算的限制,简化了开发过程的同时也使得更多的现代先进算法得以在数字系统中实现。一些芯片甚至有专门针对电机控制的开发板以及软件平台可实现控制系统参数的在线调试、波形观测以及电机参数的在线识别等功能,使得电机的数字化伺服系统实现更为简便,缩短了开发周期的同时,进一步推动了伺服系统的数字化进程。
(2)智能化
伺服系统应具有较强的鲁棒性和抗干扰能力,故各类基于智能控制理论的系统控制策略如模糊逻辑控制、神经网络控制等都将被应用到伺服系统中,每种控制方法都有其优势与劣势,所以将各种智能化的控制方法相互结合以获得更好的控制性能也将是未来的研究热点之一[61]。同时,先进的控制器将兼容多种型号的电机,实现电机参数的离线或在线辨识,具备先进的参数自整定功能,以省去用户反复调参的步骤,且电机参数与每次调试的控制器参数都可被储存在Flash当中,以便下次使用。这样具备参数记忆与参数自整定功能的高度智能化的控制器必将成为将来伺服驱动市场的主流。
(3)采用新型电力电子器件
逆变器是交流伺服系统中至关重要的一个环节,一般来说,逆变器的开关频率越高,伺服系统的性能越好,所以,碳化硅、氮化镓等第三代电力电子器件替代传统的硅器件以提升开关频率,逐渐成为近年来的产业发展方向。与此同时,功率半导体器件也不断向集成化、模块化发展,逆变器的体积也将逐渐缩小。总而言之,新型电力电子器件的出现与应用将使伺服系统性能更佳,体型更小。
4 结 论
伺服系统经历了几十年的发展,已基本完成向电气化演变的过程。目前,以永磁同步电机为执行器的交流伺服系统已成为工业界的主流,同时也是学术界的研究热点。
本文首先介绍了永磁同步电机伺服控制系统的发展历程、总体结构及国内外研究现状。作为典型案例,该系统包含电流环、速度环与位置环在内的三闭环控制。为提升系统性能,使其满足人们对抗扰性、快速性以及鲁棒性等性能的高要求,现阶段研究者们普遍将各类现代控制算法应用到伺服系统的各个环节中,以替代传统鲁棒性较差的PI控制器。
最后,对永磁同步电机伺服控制系统的未来做出了展望。总体来说,其发展趋势可归结为三个方面:数字化、智能化以及采用碳化硅、氮化镓等新型电力电子器件。
