基于频域牛顿迭代的水声频率估计算法研究
2022-09-28李言胜张建成秦正昌
李言胜,张建成,颜 琪,秦正昌
(青岛理工大学信息与控制工程学院,山东 青岛 266525)
1 引言
水声频率估计可广泛应用于水下定位与导航、水下目标勘探以及运动水声通信等领域[1]-[6]。常用频率估计算法多建立在信号离散傅里叶变换(Discrete Fourier Transformation,DFT)基础上,着重解决栅栏效应[7]问题。Rife等人在文献[8]中提出双谱线法,利用信号频谱主瓣内最大和次大谱线的幅值比例关系插值来进行频率估计。但当信号真实频率处于DFT量化频率附近时,噪声对次大谱线的影响可能导致插值方向错误,增大估计误差。对此,文献[9]提出修正算法,加入适当的判决条件进行频率搬移,再利用双谱线法得到频率粗估计值进行迭代,提高频率估计精度,但是该算法仍具有抗噪性差的缺陷。文献[10]提出利用信号频谱中幅值最大的三根谱线修正频率估计值,但信号频率位于DFT两量化频率之间的中心区域时,该算法精度不高。文献[11]提出迭代线性预测算法,采用线性预测进行频率粗估计,反复使用变频、低通滤波和抽取运算,降低频率估计信噪比(Signal Noise Ratio,SNR)阈值,提高估计精度,但计算量大。文献[12]提出将高频信号搬移到低频段,低通滤波保留所需频段,以适当频率重采样后进行DFT,达到局部频谱细化的目的,再进行频率估计,估计精度较高,但算法整体结构复杂。上述算法大多利用信号频谱中两个或多个幅值或相位信息对频率估计值进行优化,但在SNR较低时,噪声对信号幅值或相位影响较大,可能导致误差变大。本文仅利用DFT后的最大谱线进行频率粗估计,将粗估计值作为牛顿迭代初始值进行两次迭代,得到最终频率估计值。该算法结构简单,低SNR时依然具有良好的稳定性。
2 水声频率估计算法原理
定义发射信号为

(1)
其中,A0、f0和φ0分别为发射信号的幅值、频率和初相位,fs为采样频率,N为样本点数。
经过水声信道后得到接收信号
n= 0,1,…,N-1
(2)
其中,P为水声信道多途数,Ap、fp和φp分别为信号通过第p条路径的幅值、频率和相位,w(n)为环境噪声。对r(n)进行N点DFT得
m = 0,1,…,N-1
(3)
定义M为R(m)谱线幅值最大处的抽样点,即
|R(M)| = max{|R(m)|}
(4)
由f=mfs/N得点M对应频率值为M,0=Mfs/N,该值即接收信号的频率粗估计值。将M,0作为牛顿迭代初始值进行频率精估计,弥补栅栏效应带来的估计误差。由(3)得关于频率f的幅度谱为

(5)
由数学关系得其一阶导数G′(f)可近似表示为
G′(f) ≈G′(M,0) +G″(M,0)(f-M,0)
(6)
其中,G″(M,0)为G(f)在M,0处的二阶导数,由于接收信号频谱幅值在真实频率处应取得极值,因此令(6)右端等于0,得到关于第一次牛顿迭代后的频率估计值M,1的关系式为
G′(M,0) +G″(M,0)(M,1-M,0)=0
(7)
整理得

(8)

(9)
3 仿真
发射单频信号,幅度为1V,频率为9kHz,初相位为0。样本点数为8192,采样频率为120kHz。水声信道如图1所示,横轴表示时间,纵轴表示幅度,信道中含三条多途干扰,分别较直达波延时2ms、5ms和8ms,频率与直达波相同。

图1 水声信道
所提算法多次迭代性能对比如图2所示,横轴表示SNR,纵轴表示100次试验频率估计值。可看出,所提算法在两次迭代后已达到良好的估计性能,增加迭代次数,估计性能不再有明显提升。因此,本文算法采用两次迭代估计接收信号频率。

图2 多次迭代对比
不同算法频率估计性能对比如图3所示,横轴表示SNR,纵轴表示频率估计值。可看出,SNR较高时,三种算法性能相当,但SNR较低时,所提算法性能更好,即该算法抗噪性更强。

图3 不同算法对比
4 水箱试验
2019年11月在青岛理工大学进行了水箱试验,场景如图4所示。水箱长1.16m,宽0.76m,高0.62m,试验时换能器与水听器均保持静止,布放如图5所示,收发节点间水平距离为0.4m,深度为0.5m。水箱随机信道如图6所示,横轴表示时域抽头数,纵轴表示归一化幅度,可知水箱信道具有强多途干扰。由于试验过程中换能器与水听器的相对位置并未改变,所以多途干扰不会使接收信号产生多普勒频移。

图4 试验场景
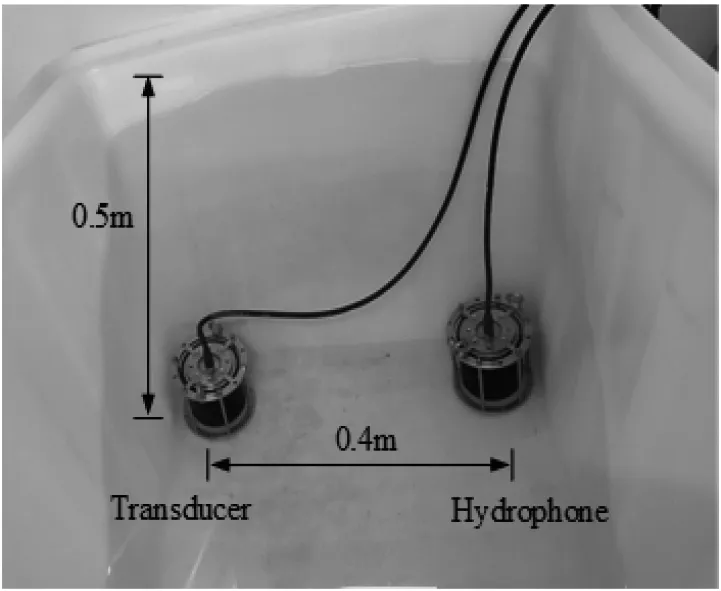
图5 换能器、水听器布放
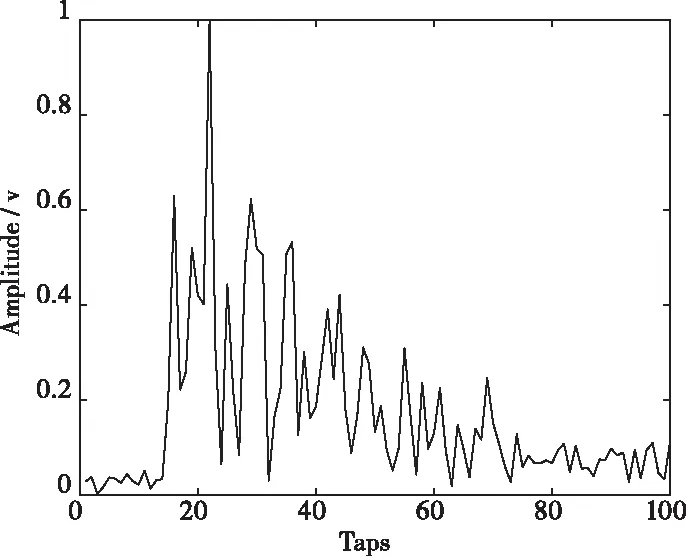
图6 水箱信道
换能器发射频率为10kHz的单频信号,信号持续时长约2.2s,采样频率120kHz,水听器接收信号如图7所示,横轴表示时间,纵轴表示幅度。由于收发节点距离较近,环境噪声较小,因此近似当成无噪声处理。
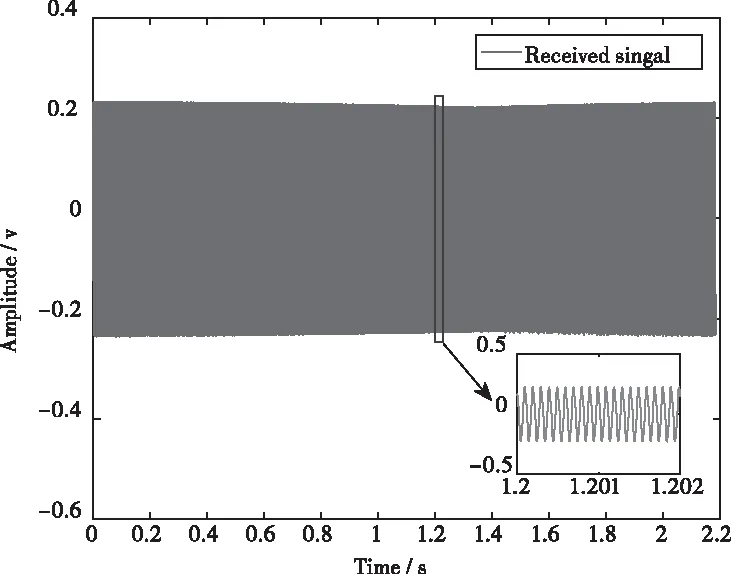
图7 接收信号
在接收信号中人为加入随机高斯白噪声,获得SNR为-20~20dB的接收信号。采用所提算法进行频率估计,结果如图8所示,横轴表示SNR,纵轴表示100次水箱试验平均频率估计值。

图8 频率估计
可看出,随着SNR的提高,频率估计值逐渐趋于稳定,最终与发射频率差值仅为0.033Hz,精度较高。试验验证了本文所提算法在强多途干扰水声信道中的有效性。
5 海上试验
2019年11月在黄海胶州湾小港码头附近海域进行了外场试验,试验地点如图9。试验当天多云转阴,4-6℃,东风2级。试验采用双船作业形式,发射船长17.8m,宽4m,接收船长20m,宽4m,船上配有220V,3000W发电机,保障设备供电问题。

图9 试验地点
5.1 静止试验
接收船和发射船均锚定,两船相距500m,发射船所在海域水深约9m,接收船所在海域水深约12.6m,水听器换能器放置于水下4m,试验参数如图10。

图10 试验参数
换能器依次发射8组不同频率的单频信号,初始频率7kHz,终止频率14kHz,间隔为1kHz,每组信号连续发射两次,每次持续时间为4s,采样频率为120kHz。图11为发射频率9kHz时水听器接收信号,横轴表示时间,纵轴表示幅度。应用所提算法进行频率估计,得到八组不同频率下的频率估计差值(发射信号频率值f0与接收信号频率估计值M,2之差),结果如图12所示,横轴表示发射信号频率,纵轴表示频率估计差值。可看出,所提算法在海上静止试验中仍可进行较为精确的频率估计。但与水箱试验相比,频率估计差值变大,这是实际海洋中信道复杂多变以及环境等诸多因素影响所致。

图11 接收信号(9kHz)

图12 频率估计差值
5.2 漂浮试验
接收船和发射船最初相距700m,接收船锚定,发射船向远离接收船一千多米处漂浮,其余参数同静止试验。仪器显示发射船实时速度约为0.3~0.5m/s,图13给出了两个不同时刻点发射船速度及其与接收船的距离信息,图13(a)显示16时30分发射船速度为0.42m/s(0.53m/s约为1kt),此时两船相距1.11km(1.85km约为1nm);图13(b)显示16时39分发射船速度为0.53m/s,此时两船相距1.29km。

图13 试验信息
换能器依次发射8组不同频率的单频信号,初始频率7kHz,终止频率14kHz,间隔为1kHz,每组信号发射一次,持续时间为4s,采样频率为120kHz。图14为发射频率11kHz时的水听器接收信号,横轴表示时间,纵轴表示幅度。经计算,发射频率为11kHz时,接收信号SNR达到25dB,因此可近似当成无噪声处理。人为加入随机高斯白噪声,获得SNR为-20~20dB的接收信号。应用所提算法进行频率估计,得到不同SNR下的频率估计差值,该差值即为多普勒频移量。已知声波在海洋中的传输速度c约为1500m/s,发射船运动速度的换算公式为v=c|f0-M,2|/f0。

图14 接收信号(11kHz)
换算得到发射船在发射11kHz信号时的速度如图15,横轴表示SNR,纵轴表示速度估计值。

图15 发射船速度(11kHz)
可看出,随着SNR的提高,估计得到的发射船速度逐渐趋于稳定值0.4003m/s,与实时速度相符。
图16为不同发射频率下估计出的发射船速度,横轴表示发射信号频率,纵轴表示速度估计值。可看出,估计得到的发射船速度在0.37~0.48m/s范围内,与试验过程中仪器观测到的实际速度相符,验证了本文算法在海上漂浮试验中的有效性。

图16 发射船速度
6 结论
本文提出了基于牛顿迭代的水声频率估计算法,结构简单,采用DFT和两次牛顿迭代有效解决栅栏效应问题,实现水声频率精确估计。仿真、水箱试验及海上试验结果均表明,该算法在低SNR下具有良好的估计性能,能够实现可靠的水声频率估计。所提算法可为水下定位与导航、水下目标勘探及运动水声通信提供直接技术支撑。