变电站智能巡检机器人巡视路线优化
2022-09-26陈行晓陈群锋
杨 杰,杨 曦,陈行晓,陈群锋
(国网浙江省电力有限公司检修分公司,浙江 杭州 311232)
随着机器人制造技术的不断进步与完善,变电站智能巡检机器人在变电站日常的设备运维管理中发挥的作用越来越显著。通过对智能巡检机器人的合理运用,其在变电站运维工作中的应用主要体现在现场设备各类型巡视、设备的红外测温及表计数据抄录、设备现存缺陷隐患的跟踪等方面[1]。在500 kV变电站无人值守的深入推进的背景下,为更好的对事故应急状态下变电站电气设备的运行状况进行掌控,运用智能巡检机器人代替运维人员对故障设备进行先期巡检,将发挥越来越重要的作用。
智能巡检机器人系统由计算机监控后台、通信导航系统、充电电源系统、机器人本体等组成,以机器人技术、电力设备非接触检测技术、多传感器融合技术、模式识别技术、导航定位技术以及物联网技术等各类技术为支撑,能够以全自主、本地或远方遥控模式代替或辅助人工进行变电站巡检,巡检内容包括设备温度、仪表等,具有检测方式多样化、智能化、巡检工作标准化、客观性强等特点。同时,系统集巡视内容、时间、路线、报表管理于一体,实现了巡检全过程自动管理,并能够提供数据分析与决策支持[2]。
1 智能巡检机器人系统现状分析
目前,变电站的智能巡检机器人已实现对全站电气设备的红外和可见光的覆盖,通过预设的巡视任务,对全站不同区域电气设备进行不间断的周期性的巡检,而对于新增的有特殊要求的任务,则须要通过人工进行设置。现场实际勘查中,以事故处理时的需求为导向,通过现场的智能巡检机器人长期以来的运行状况数据进行分析整合,并结合模拟故障,对智能巡检机器人在事故处理时的运行状况进行检验,得出智能巡检机器人在对设备进行巡视时,按照预定设置的路线,遵循设备间隔顺序依次对各设备进行巡检,若事故处理时,须对特定间隔的特定设备进行快速检查,但智能巡检机器人的行进路线并未按照最短路线进行,而是从外围绕了一圈,这样就无法满足事故应急时的快速响应。
2 智能巡检机器人路线的改进
无人值守变电站内发生电气设备异常及故障等情况时,由于现场没有运维人员在第一时间去现场获取故障设备信息,主站除了通过监控后台、工业视频等设备及时了解相关信息,也须通过现场的智能巡检机器人对故障设备进行更进一步的全面观测。
在事故应急处理状态下,须现场的智能巡检机器人能够快速高效的到达故障设备所在位置,并获取现场故障设备的关键信息。目前,变电站内的智能巡检机器人采用感应激光点位的方式进行定位巡检,智能巡检机器人沿着事先规划设置的路径对设备展开巡视检查。变电站现场激光点位的设置基本上是按照日常巡视的行进路线进行铺设,通过观察机器人对不同区域设备的巡视情况,发现智能巡检机器人存在着巡视路线不够合理及绕道等现象,在事故应急过程中,就无法快速到达某些故障设备所在位置,进行现场设备运行状况的信息采集。
智能巡检机器人在对变电站现场电气设备进行巡视检查时,能否顺利到达目标设备,其导航系统在其中扮演了非常重要的角色。导航系统引导智能巡检机器人到达目标设备,依靠的是场地中巡检线路上铺设的激光点位,智能巡检机器人通过其底盘上安装的传感器来接收巡检线路上的激光点位信息,以此来引导机器人按照相应的巡检路线到达目标设备所在位置[3]。因此,装有激光点位的巡检路线的位置布局如何确定,也将最终影响智能巡检机器人的路线选择及事故应急时的处理效率。
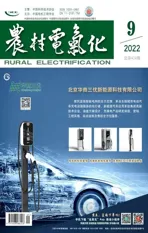
对于500 kV 变电站常规的AIS 设备,其设备区域的分布特点一般包括500 kV设备区、220 kV设备区、主变及35 kV 设备区,智能巡检机器人则根据巡检线路上的激光点位对上述区域展开巡视。依据站内设备布局及智能巡检机器人的导航方式特点,采用几何模型进行环境建模[4],将500 kV 变电站内设备环境抽象化为智能巡检机器人的导航轨迹模型,其典型的轨迹模型如图1所示。
如图1 所示模型可知,按照目前的巡视轨迹,能够满足智能巡检机器人对站内电气设备各个巡视点的覆盖。智能巡检机器人按照设定好的的巡视路线对各个间隔设备依次开展巡检和红外测温等工作。

图1 典型巡视轨迹模型图
当现场电气设备发生故障或异常情况时,此时主站须无人值守变电站内的智能巡检机器人立即启动应急任务对现场故障设备进行巡检,由于发生故障或异常的设备存在着随机性,假设机器人在图1中的1 号点位,故障或异常设备在220 kV 设备区的2号点位,由图1的机器人导航轨迹图可知,智能巡检机器人行进的最近距离路线是经3 号点位一侧到达目标设备,由此可知,此段路线从220 kV设备区一侧绕了一段路,并非最优路线,在事故应急时,影响了智能巡检机器人到达故障设备的时间。
通过对变电站电气设备所处位置的现场运行环境进行勘察分析,并结合智能巡检机器人本体的底盘驱动结构特点及其直行转弯时对周边空间的要求,发现可以充分利用变电站现场的电缆盖板及在符合安全及机器人运行条件的位置增设相应巡视路线,以此来扩展智能巡检机器人巡视轨迹的多样性和可选择性。
变电站现场的电气设备的位置布局比较复杂,而在变电站设计之初,就预留了相应充足的空间给电缆进行布设,因此电缆盖板所在的路线上基本能够躲开设备障碍物,符合作为机器人巡视路线选项的条件。
在对变电站现场地理环境及设备布局特点进行深入调查分析后,选取合适的电缆盖板所在通道或新增部分通道作为智能机器人巡检线路的补充,可以有效完善机器人的导航轨迹,提高机器人的巡检效率。现场电缆盖板设计时一般高于路面水平位置,须在电缆盖板与巡视路面之间铺设适合机器人行进的斜坡路。在充分合理利用现场电缆盖板通道及新增部分通道的基础上,可将智能机器人的典型巡视导航轨迹模型优化为图2所示。
图2 改进后典型巡视轨迹模型示意图
由图2 可知,当智能机器人在充电房中待命或在执行巡检任务中接收到事故应急响应任务命令时,由于可供选择的路径增多,经过设定好的路线规划方法计算,灵活选择就近巡视轨迹对目标设备进行巡检,可有效提高事故应急响应速度。
若能再变电站设计之初,通过统筹协调规划,引入道路交通路线规划的可行理念,提前规划预留智能机器人的巡视路线,可有效提高智能机器人巡视路线的合理性和实用性。
3 结束语
鉴于智能巡检机器人在变电站实际使用过程中,在执行任务过程中的路径选择存在不足,不能实现快速的响应。本文在充分分析产生的原因以及现场实际勘察基础上,充分利用变电站内的电缆盖板或增加辅助道路等形式,丰富机器人的路线选择,当机器人处在静止或运动过程中接到应急指令时,能够快速找到就近路线,采用合适的算法进行路线规划,提高了到达目标设备的实效性。