基于类噪声信号的等值负荷惯量两阶段辨识方法
2022-09-14吴沛萱张欣然周晋航叶洪波凌晓波
吴沛萱,张欣然,周晋航,陆 超,叶洪波,凌晓波
(1. 清华大学 电机工程与应用电子技术系,北京 100084;2. 北京航空航天大学 自动化科学与电气工程学院,北京 100191;3. 上海电力大学 电气工程学院,上海 200090;4. 国网上海市电力公司,上海 200122)
0 引言
负荷模型是电力系统数学模型的重要组成部分,负荷建模的准确性将直接影响系统仿真分析的可靠性[1]。作为反映负荷机电暂态特性的主导参数,负荷惯量的估计结果将对系统电压稳定[2]、频率稳定[3]和低频振荡[4]的分析结论产生重要影响。然而,考虑到实际负荷的复杂性、时变性和分布性[5],实现负荷惯量的在线、准确估计又是一项极富挑战性的工作。
当前负荷建模工作主要沿用统计综合和总体测辨两大类技术路线。由于统计综合法时效性较低且花费的人力物力巨大,对等值负荷惯量的估计往往采用总体测辨法的思路,即基于对实际量测数据的拟合、通过优化等方法辨识得到预选定模型结构下的各模型参数。然而,由于负荷惯量相较于其他负荷参数的辨识灵敏度低、可辨识性差[6],惯量参数的改变对于辨识目标函数值的影响不明显,这就导致惯量参数寻优困难、难以准确地收敛至全局最优解。
面对上述难题,传统总体测辨法主要采用以下2 种解决办法:①相较于小扰动,大扰动更能充分激发负荷的动态特性,且惯量参数在大扰动下的灵敏度相对更高[7],故尽可能选择故障扰动数据开展辨识;②部分文献考虑到辨识目标函数对惯量参数不敏感,故采用固定惯量为典型值或缩小惯量参数辨识范围的方式对惯量进行近似处理[8-9],以提升其他高灵敏度参数的辨识准确性。显然,上述办法或依赖于故障扰动的产生,或采用人为干预方式忽略了参数的时空变化特性,均无法实现负荷惯量的在线、准确估计。
近年来,广域量测技术的飞速发展和同步相量测量装置的广泛应用为负荷惯量辨识提供了新的思路。由于小波动类噪声信号在电力系统中时刻存在且与系统机电暂态过程所在频段吻合,基于类噪声信号的负荷辨识方法能够准确跟踪负荷的时空变化特性,逐渐成为负荷辨识的主流方法之一[9-11]。基于此,文献[12]进一步提出了一种两阶段类噪声辨识方法,在仿真环境中实现了恒转矩情形下惯量参数的准确辨识。但需要注意的是,恒机械转矩的假设与实际负荷的复杂特性相去较远,由此得到的实测辨识结果将不再可靠,难以反映负荷真实的机电暂态过程。
为此,本文提出了一种适用于实际负荷辨识场景的两阶段类噪声惯量辨识方法。该方法采用两阶段辨识的基本思路,将电磁和机电暂态解耦,有效避免了直接辨识场景下辨识参数过多、部分参数可辨识性差的不利影响;引入二次型转矩来近似类噪声下不同负荷的机械特性,克服了以往方法恒转矩假设的局限性,能够准确辨识不同变转矩情形下的惯量参数;针对实测辨识场景,进一步增设了实测数据处理环节,实现了对实际220 kV 站点等值负荷惯量的稳定、可靠辨识,并从曲线拟合效果和参数稳定性角度验证了所提方法的正确性。本文方法尚属国内外类噪声负荷惯量辨识的首次实际应用。
1 负荷模型结构及负荷转矩特性建模
1.1 Z+M综合负荷模型结构
本文综合考量模型的辨识难度及其对于实际负荷特性的描述能力,选定我国区域电网仿真中常用[13-14]的Z+M 模型作为待辨识的负荷模型。Z+M 负荷模型由静态恒阻抗负荷和动态感应电动机负荷并联组成,其稳态电路结构如附录A 图A1 所示。其中,感应电动机部分的电路参数可以简化为3 个主导电磁参数,如式(1)所示。

式中:Xs为定子电抗;Xm为励磁电抗;Xr为转子电抗;Rr为转子电阻;ω0为定子转速;主导电磁参数X为开路电抗,X′为暂态电抗,T′d0为开路时间常数。
经参数变换后,感应电动机的三阶状态方程可列写为:
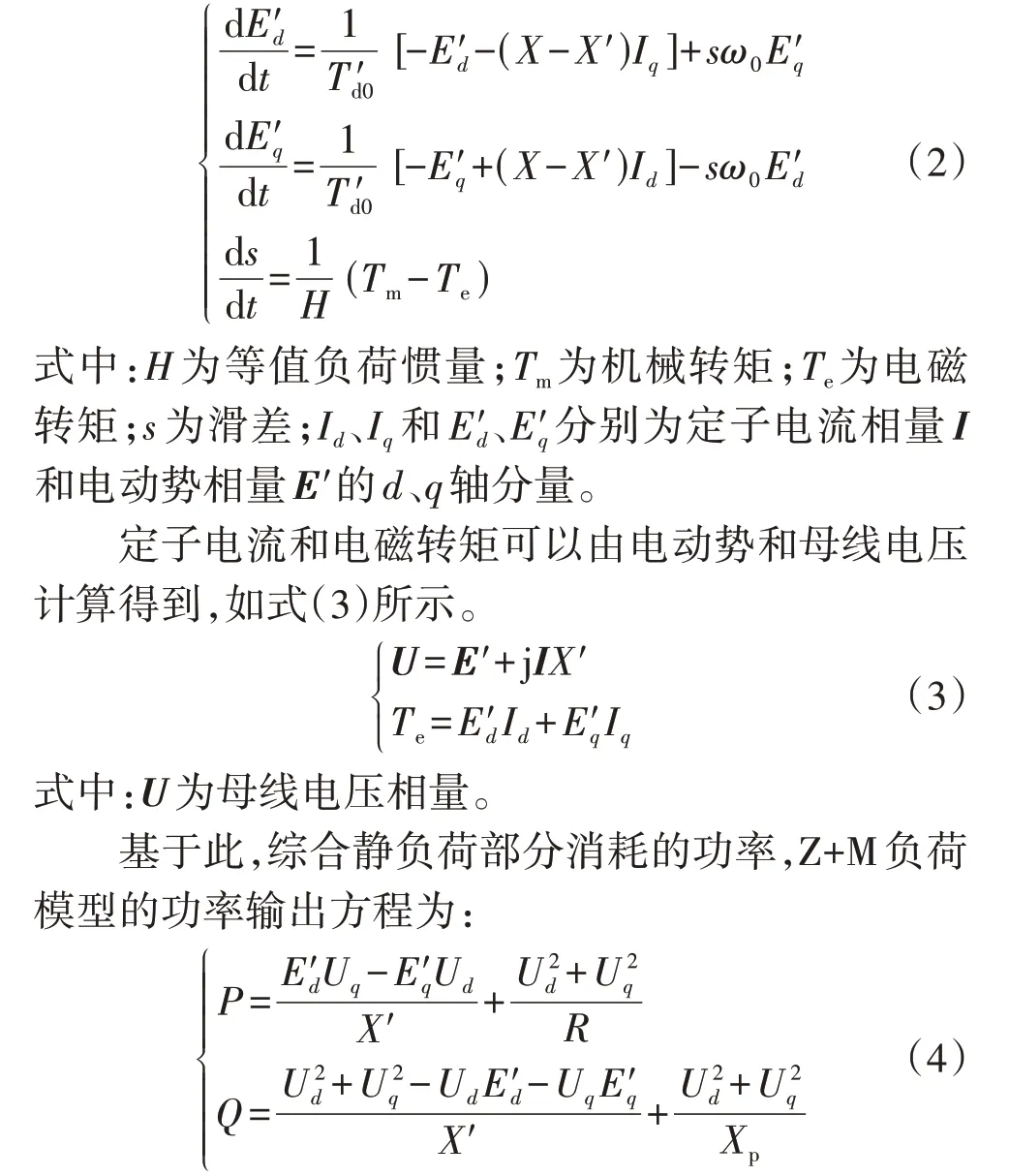
式中:Ud、Uq分别为U的d、q轴分量;R为图A1 中恒阻抗部分的并联电阻;Xp为恒阻抗部分的并联电抗。
1.2 类噪声场景下等值负荷转矩特性建模
本文主要关注的负荷惯量参数主要通过机电状态方程(即式(2)中与滑差相关的第3 个状态方程)对负荷的动态特性产生影响,而机电方程中主要的不确定性来自机械转矩Tm。因此,对等值负荷机械转矩的准确建模将直接影响惯量辨识的可靠性。
在以往负荷建模研究[15]以及PSAT/PSASP 等仿真软件的设置中,机械转矩一般为转子转速的函数,其表达式主要包括恒转矩Tm1、二次型转矩Tm2和指数型转矩Tm33种,如式(5)所示。

式中:T0为常数;ω为电动机转子转速;A、B和C分别为二次型转矩中转速二次方项、一次方项的比例系数和常数项;K1、K2分别为指数型转矩中的常数项、指数项系数;p为指数。
显然,采用恒转矩对机械转矩进行建模相对粗糙,此时所有与转速及其次方项线性相关的分量均被忽略,这与泵类等常见电动机负荷的转矩特性不符;而与转速相关的二次型和指数型表达式都需要辨识3个参数,其复杂程度及辨识难度相近。
值得注意的是,在本文涉及的类噪声小波动辨识场景下,电动机转子转速ω的变化不大[16],可以认为:

2 类噪声负荷惯量两阶段辨识方法
2.1 总体辨识框架
图1 展示了类噪声负荷惯量两阶段辨识方法的总体框架。在第一阶段,基于电压及功率类噪声数据进行电磁参数辨识,并得到滑差、电动势和定子电流的估计值;在第二阶段,基于一阶段估计变量开展惯量及转矩系数辨识,最终得到负荷惯量参数。2个辨识阶段依次进行、彼此解耦,分别利用感应电动机的电磁和机电状态方程开展参数的优化辨识。下文将分别介绍上述2 个辨识阶段的具体实现方式,并给出面向实测惯量辨识场景的针对性设计。
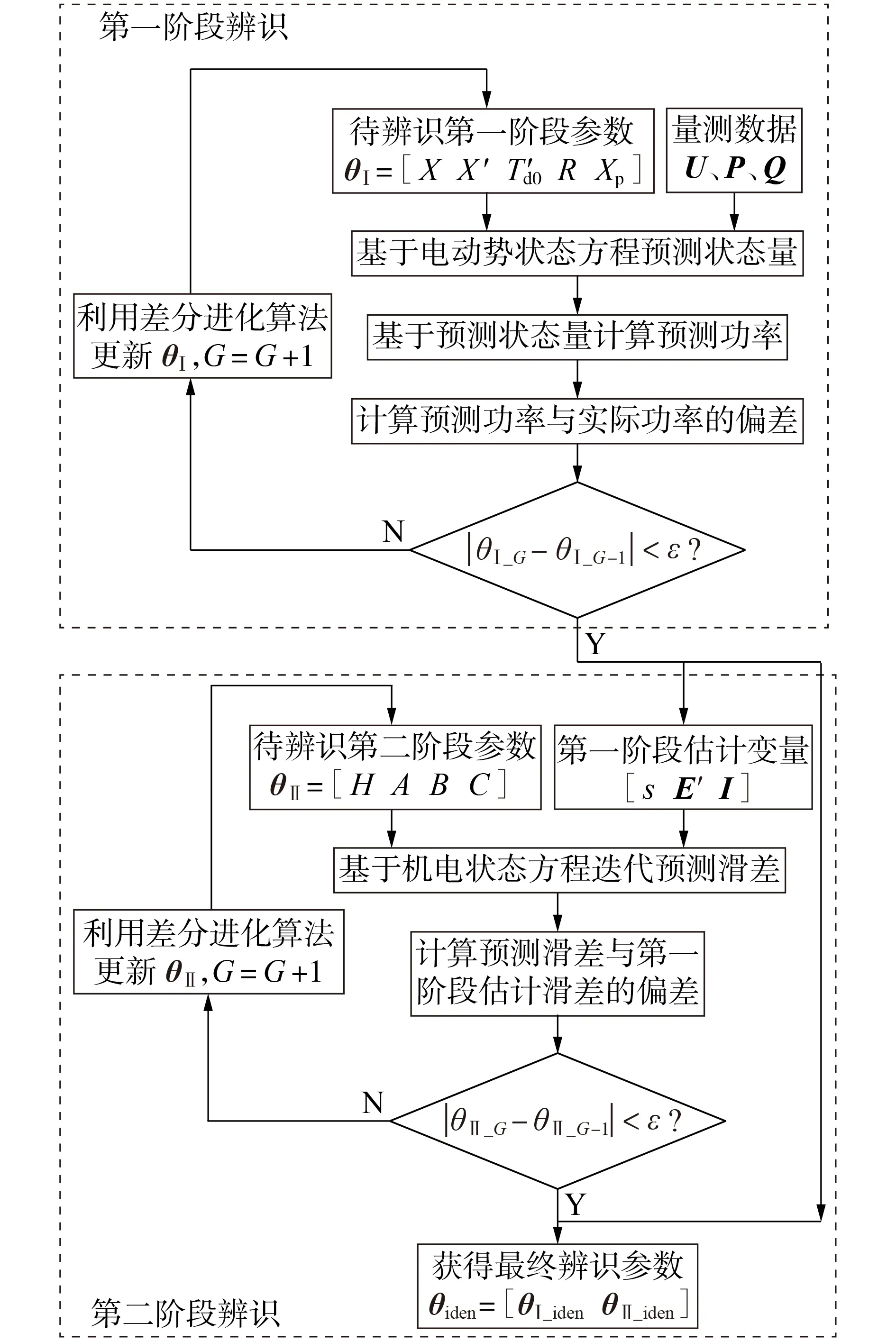
图1 所提两阶段负荷惯量辨识方法框架Fig.1 Framework of proposed two-stage load inertia identification method
2.2 第一阶段电磁参数辨识
第一阶段辨识的主要目的在于得到准确的负荷模型电磁参数,进而准确估计感应电动机动态变化过程中的滑差、电动势等状态变量,为第二阶段基于机电暂态的惯量辨识提供辨识数据基础。
具体地,首先基于负荷模型输出方程(式(4))得到k时刻的感应电动势为:

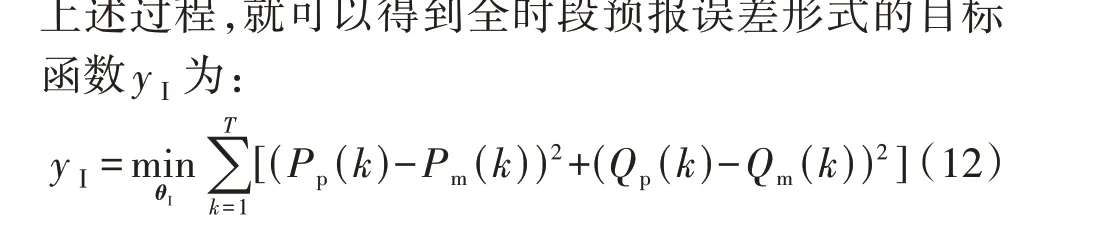
式中:T为离散时间长度。由式(12)可知,第一阶段的辨识目标为预测功率的误差平方和最小,待辨识参数为5 个负荷电磁参数,即θⅠ=[X X′T′d0R Xp]。为避免优化受到初值的影响陷入局部最优,本文采用全局性能较好的差分进化算法进行参数的优化辨识。
2.3 第二阶段惯量参数辨识
在辨识得到第一阶段的最优电磁参数后,可以将其回代得到感应电动势相量E′和定子电流相量I,进而依据式(11)估计出一阶段优化后的电动机滑差s,作为第二阶段辨识的基准值。
同时,电动机滑差的变化还应当满足电动机的机电状态方程,即任意时刻的滑差可以由机电状态方程迭代预测得到:
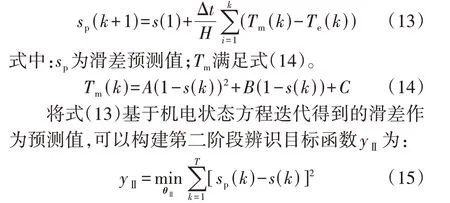
第二阶段的待辨识参数包括4 个机电参数,即θⅡ=[H A B C],这里同样采用差分进化算法开展辨识,最终得到本文主要关注的负荷惯量参数。
2.4 面向实测辨识场景的数据处理环节
在实测辨识场景下,高频噪声、异常值等量测数据质量问题将直接影响后续两阶段辨识的可靠性;与此同时,由于实际负荷特性复杂未知,单次辨识结果的不确定性较强,往往很难反映一段时间的真实负荷特性。为此,需要在基本辨识算法的基础上增添实测数据处理环节,以提升本文方法的实际应用价值。数据处理环节具体包括量测数据预处理和辨识参数后处理两部分。
1)量测数据预处理。
在辨识前,需要对实测同步相量测量单元(PMU)电压幅值和有功/无功功率数据依次进行数据粗筛、异常值处理以及小波去噪处理;此外,需要对功率数据进行低频去趋势操作,以得到适用于辨识的平稳信号。上述步骤的具体设置见文献[17]。
2)辨识参数后处理。
在两阶段辨识后,首先需要去除辨识参数达到预设寻优范围边界的不可靠“早熟”结果。同时,为避免少量离群值对整个时段的惯量估计造成干扰,从统计角度筛去在[Hˉ-σ,Hˉ+σ](Hˉ为惯量均值,σ为标准差)范围以外的辨识结果,取剩余结果的中位值作为整个时段的惯量估计值。
3 仿真算例分析
3.1 仿真算例设置
基于MATLAB 搭建理想Z+M 综合负荷模型,设置模型参数真值为:[X X′T′d0R XpH]=[3.600 0.393 0.376 0.460 0.900 2.000]p.u.。
为模拟系统的类噪声波动,向母线电压幅值中加入经2.5 Hz低通滤波的零均值正态随机扰动。在此基础上进行20 s 的连续时域仿真,得到采样频率为50 Hz 的有功和无功功率信号用于两阶段模型参数辨识,仿真所得类噪声功率曲线见附录A图A2。
同时,为比较文献[12]所提恒转矩惯量辨识方法和本文惯量辨识方法对于不同机械特性负荷的适用性,仿真部分设置了真实负荷转矩特性为恒转矩、二次型转矩和指数型转矩的3种场景。
1)恒转矩负荷。设定稳态滑差s0=0.10,令式(2)中所有状态方程微分项为0,求得稳态转矩为:
3)指数型转矩负荷。设定恒转矩比例为20%,与转速相关的转矩比例为80%,指数项p=1.5,即:
Tm3=T0(0.2+0.8ω1.5)=0.206+0.826ω1.5(18)
具体地,设定辨识窗长为4 s,等距选取20 个辨识窗,在上述3 种场景下分别开展本文所提两阶段惯量段辨识和恒转矩惯量辨识。
3.2 参数可辨识性分析
在开展参数辨识前,需要对类噪声条件下各参数的可辨识性进行分析。参数的可辨识性反映了给定量测下参数辨识的难易程度,国内外负荷建模研究通常采用灵敏度或轨迹灵敏度方法开展参数的可辨识性分析[7,18-19]。基于此,本文参考文献[7]定义负荷参数的可辨识性S,如式(19)所示。

式中:θi为待研究参数真值;θ-i为剩余参数真值;Δθi为设置的参数摄动量。从公式定义来看,上述可辨识性指标反映了在相同电压激励下,各负荷参数在真值附近改变相同比例后功率输出的偏差。具体地,定义参数摄动量为真值的1%,在二次型转矩场景下计算式(9)所示各参数的可辨识性指标。
经计算,在直接辨识场景下,Z+M综合负荷模型中各模型参数[X X′T′d0R XpH A B C]对应的可辨识性指标分别为[5.869 47.90 0.966 69.51 18.19 0.052 10.95 12.21 3.375]p.u.,从大到小(辨识难度从低到高)排序为:R>X′>Xp>B>A>X>C>T′d0>H。
相较于其他参数,电动机转子开路时间常数和负荷惯量较难辨识,而负荷惯量的可辨识性指标又要比开路时间常数低1 个数量级,这是由于类噪声信号激励下电动机负荷的机电暂态过程激发不够充分,滑差变化不够显著。因此,在类噪声场景下直接辨识出负荷惯量参数比较困难;而本文第一阶段辨识聚焦于电动机的电磁暂态过程,能够准确估计电动机滑差的变化,进而降低后续惯量参数辨识的寻优难度。
3.3 第一阶段电磁参数辨识准确性分析
由于第一阶段辨识不涉及等值负荷的机电特性,故这里只展示场景3(指数型转矩负荷)的辨识参数总体分布情况,以说明第一阶段辨识的准确性。
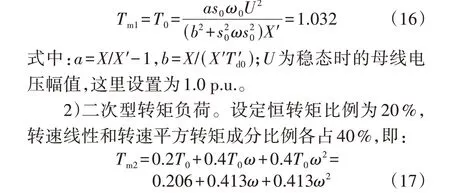
第一阶段仿真辨识参数的分布情况如图2 所示。图中纵轴参数单位为标幺值,后同。由图2 可见,除极少数离群点外,第一阶段各辨识参数分布在设定的真值附近,上下浮动较小。经计算,第一阶段辨识参数的均方根误差均值仅为0.076,这说明第一阶段辨识结果稳定、准确。
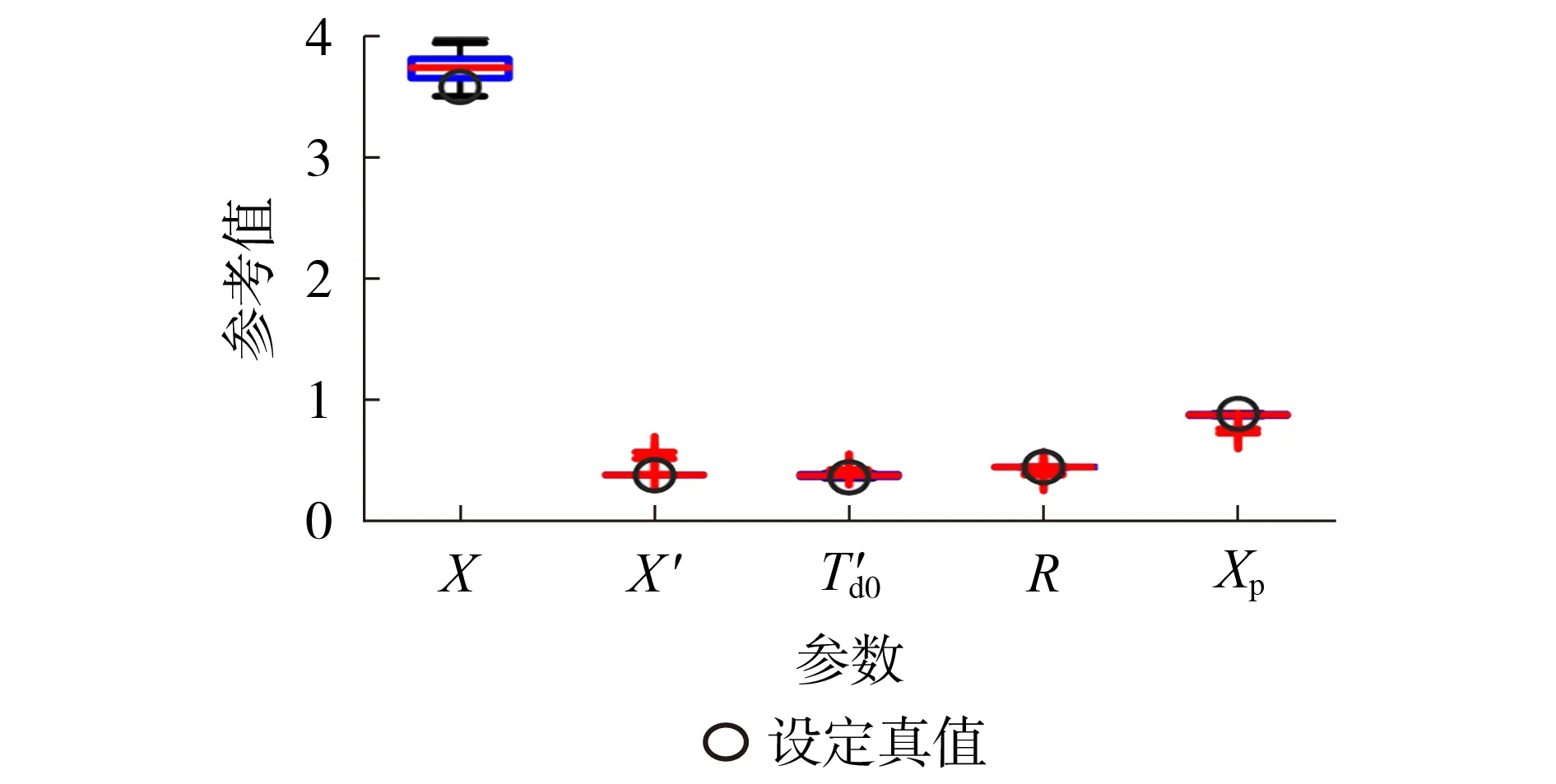
图2 第一阶段仿真辨识参数的分布情况Fig.2 Distribution of identified parameters in first stage
进一步地,20 号辨识窗经第一阶段辨识后估计的滑差曲线如附录B 图B1 所示,容易看到第一阶段滑差的估计值与真实值几乎完全一致,这表明第一阶段辨识能够为第二阶段的惯量辨识提供可靠的辨识基准。
3.4 不同场景下两阶段辨识方法的适用性验证
在得到一阶段估计的状态变量后,分别采用文献[12]恒转矩惯量辨识方法和本文惯量辨识方法对3 种场景下的负荷惯量进行第二阶段辨识。这2 种方法在二次型和指数型转矩场景下的滑差曲线拟合情况见附录B 图B2。由图可见:本文惯量辨识方法在2 种场景下均可以较好地拟合第一阶段估计的滑差曲线;恒转矩惯量辨识方法得到的滑差拟合值则产生了明显偏离,这说明恒转矩惯量辨识方法无法适用于变转矩场景,所辨识的惯量值将不再可靠。
为反映惯量辨识的总体准确性,图3 进一步展示了上述2 种方法在不同场景下的惯量辨识值分布情况。由图可见:本文所提变转矩惯量辨识方法能够适应不同的负荷机械特性,辨识惯量参数的准确性高、分散度低;而文献[12]所提辨识方法只能准确辨识恒转矩负荷的惯量,对于二次型、指数型转矩负荷的辨识稳定性差且惯量参数误差较大。

图3 不同场景下惯量辨识值的分布Fig.3 Distribution of identified inertias in different scenarios
3.5 量测误差对惯量辨识准确性的影响
考虑到类噪声信号的波动幅值较低,量测误差可能会对两阶段辨识造成较大干扰。为此,需要研究不同水平的量测误差对于惯量辨识值准确性的影响,以验证实测辨识场景下数据预处理的必要性。具体地,分别向有功功率和无功功率信号注入标准差为类噪声波动幅值0.1%、0.5%、1%和2%的零均值正态随机扰动,并对上述3 种转矩场景下的含噪信号分别开展20 次两阶段惯量辨识,辨识结果统计如表1所示。由表1辨识惯量均值和标准差可看出,不同场景下惯量辨识值的整体精度和稳定性会随着量测误差水平的提升而变差。特别地,当量测误差较大(如表1中2%误差水平)时,惯量辨识的准确性会显著下降,这是由于量测误差造成的第一阶段电磁参数及状态变量估计偏差又被引入了第二阶段惯量辨识过程,原本较高的量测误差被进一步“放大”。因此,在实测辨识场景下,需要对原始PMU 量测数据进行数据预处理,以保证后续辨识结果的可靠性和稳定性。

表1 量测误差对惯量辨识精度的影响Table 1 Influences of measurement error on inertia identification accuracy
4 实测数据分析
为校验本文所提实测惯量辨识框架的可靠性和适应性,选取上海某220 kV 负荷站点2021 年3 月24日16:28—16:38(时长为10 min)的PMU量测数据进行类噪声负荷惯量辨识。所用待辨识数据为站内2号主变高压侧电压幅值、电压相角、注入有功和注入无功量测值,采样频率为25 Hz。具体地,在整个时段内等距选取100个辨识窗,设置辨识窗长为4 s,系统容量基值定为10 MV·A。分别对每个辨识窗的量测数据进行预处理,经两阶段惯量辨识后,共得到25组有效的辨识参数。
4.1 第一阶段电磁参数辨识效果
经第一阶段电磁参数辨识后,6 号辨识窗的有功功率和无功功率拟合情况见附录B 图B3。容易看到,数据预处理可以有效地去除实际功率量测中的低频趋势项和高频噪声波动,从而提升待辨识数据的可用性。在此基础上,第一阶段辨识拟合效果优良,说明第一阶段的电磁参数辨识结果比较准确,能够为第二阶段提供可靠的状态变量估计。图4 进一步展示了第一阶段辨识参数的整体分布情况。
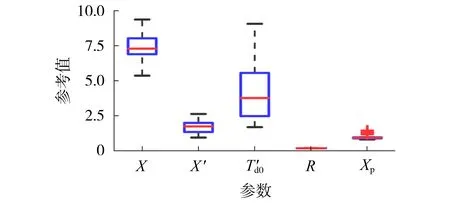
图4 第一阶段辨识电磁参数分布情况Fig.4 Distribution of identified parameters in first stage
由图4 可知:第一阶段辨识得到的[X X′R Xp]4 个电磁参数在统计分布上均具备较好的集聚特性;而T′d0参数较高的分散性可能与其灵敏度较低、辨识难度较大有关,这与3.2节可辨识性分析的结论相符。总体来看,上述结果与等值负荷在短时段内动态特性变化不大的一般认知基本相符,从另一个角度验证了第一阶段辨识的可靠性。
4.2 第二阶段惯量参数辨识效果
为突出说明本文惯量辨识方法对于实测数据的适应性,本节对比了本文方法与文献[12]所提恒转矩惯量辨识方法经第二阶段辨识的辨识结果。图5举例说明了这2种辨识方法对于滑差的拟合效果。
图5 两阶段滑差拟合情况示例Fig.5 Examples of slip fitting of two data segments
由图5 中第一阶段估计滑差变化曲线看到,实际负荷的机电特性十分复杂,除主导的低频趋势外还包含一些更高频的波动,这可能是等值母线下大量不同机械特性负荷的聚合结果。即便如此,采用本文变转矩惯量辨识得到的拟合曲线仍然可以大体反映实际滑差的变化趋势;而采用恒转矩惯量辨识方法得到的拟合曲线比较平缓,拟合效果较差,这说明恒转矩的假设过于简单,不再适用于实际惯量辨识场景。总体定量来看,本文方法第二阶段的辨识拟合误差均值为7.72×10-5,相较于文献[12]所提方法下降了约40%,这进一步验证了本文方法的有效性。图6 直观展示了经参数后处理后10 min 时段内的惯量辨识结果。
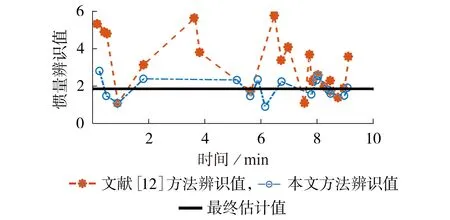
图6 10 min时段内负荷惯量辨识结果Fig.6 Load inertia identification results of studied 10-minute period
这里采用本文方法得到的所有有效结果的中位值作为整个时段的惯量估计值(即图6 中的最终估计值),得到Ĥ=1.88,此结果与IEEE 工业电动机推荐值及我国实际电网仿真采用的典型值大致处于同一水平[20]。同时注意到,本文方法在10 min 短时段内的辨识值基本稳定在估计值Ĥ附近,而文献[12]所提方法得到的辨识值分散性更强、离群点更多,说明采用本文变转矩假设辨识出的惯量值具备更高的可信度。综上所述,相较于已有方法,本文方法能够适应实测惯量辨识需求,获得准确、可靠的类噪声负荷惯量估计结果。
5 结论
本文提出了一种类噪声两阶段负荷惯量辨识方法,并基于仿真算例和实测辨识场景对所提方法的准确性和实用性作了分析、验证,最终得到以下结论:
1)本文两阶段负荷惯量辨识方法能够在类噪声条件下辨识出负荷电磁参数和各状态变量,最终获得准确的负荷惯量参数,整体的辨识拟合效果优良;
2)相较于恒转矩惯量辨识方法,本文方法能够适应不同转矩特性负荷的类噪声辨识需求,更能反映实际负荷的真实机电暂态特性;
3)增添实测数据处理环节后,本文方法能够在实际电网类噪声场景下实现惯量及其他负荷参数的稳定、可靠辨识,具备一定的实际应用价值。
附录见本刊网络版(http://www.epae.cn)。
