微波干涉式水听器臂长差测量的硬件电路实现
2022-09-14李鹏梁瑞头薛丙龙
李鹏,梁瑞头,薛丙龙
(湖南天冠电子信息技术有限公司,湖南长沙 410205)
水声探测及通信[1]是国家的重点战略,光纤传感系统在水声通信及探测方面具有重要的工程应用价值。
工程中,光纤传感系统[2]使用的水声传感器均为干涉式水听器,如广泛应用的Mach-Zehnder 型水听器和Michelson 型水听器。干涉式水听器两臂长度差的测量精度[3]决定了干涉式水听器对环境变化的感应精度。
该文对近年兴起的基于微波的测量干涉式水听器臂长差理论进行数理分析,提出了一种采用HMC833 频率综合芯片产生微波调制信号并通过STM32 的ADC 模块采样该信号的硬件实现方法。该方案将干涉光谱转换为波峰波谷,读取相邻谷值功率处扫频微波频率间隔的大小,计算臂长差,并用实验进行了验证。结果表明,该方法具有较高的测量精度,且成本低廉。
1 原 理
1.1 方案概述
光源器件通电后产生一束激光,激光进入电光强度调制器。臂长差射频板中微控制器STM32 控制微波源HMC833 产生调频微波调制信号,调制信号进入电光强度调制器对激光进行调制[4]。调制后的激光信号经过干涉式水听器的两臂发生反射后形成干涉波。干涉波为微波信号,携带水听器两臂长度差值的信息,由水听器输出端进入光电探测器,转换为携带臂长差值信息的电信号。电信号经采样滤波、信号放大与本振频率下变混频[5]后,进入微控制器的ADC 模块。微控制器采集到微波信号的功率与频率信息,通过串口或蓝牙模块发送到上位机或移动终端。上位机解调软件计算微波信号相邻谷值的频率间隔信息,进而计算出干涉式水听器的臂长差信息。
干涉式水听器臂长差测量系统架构如图1所示。
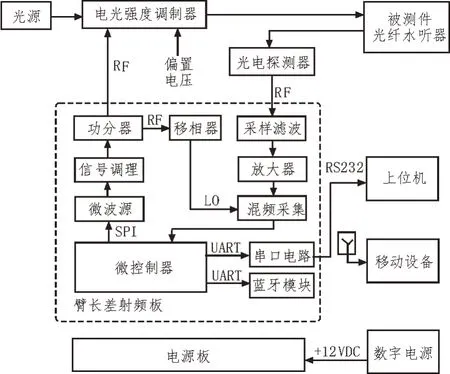
图1 系统架构框图
1.2 测量原理
1.2.1 原理推导
射频微波源产生的射频信号可以表示为式(1):

其中,Vm是输入射频微波信号的幅值,ωm是射频微波信号角频率。
加在电光强度调制器上的偏置电压可以表示为式(2):

根据电光强度调制器工作原理,对应的光相位变化可表示为式(3):

其中,VDC是偏置直流电压,Vπ是电光强度调制器半波电压。
经过微波射频信号调制的激光,通过光电强度调制器最终的输出功率可表示为式(4):

由于A、B均为常数,不对测量结果造成影响,故不加展开。
光电强度调制器输出的光经干涉式水听器后,输出的光强可表示为式(5):
其中,Δθ1=4πfmnl1/c,Δθ2=4πfmnl2/c,Δθ1、Δθ2表示调制激光在水听器两臂分别产生的相位变化量。fm表示经水听器输出的射频信号频率,c表示光在光缆中的传播速度,n表示微波光子在光缆中的折射率。
水听器输出的光信号携带臂长差信息,进入光电探测器,由光强信号转换成电流信号。对电流表达式使用bessel 展开,同时硬件滤除高阶分量,可以表示为式(6):

对该电流信号进行I/V 转换,放大滤波,去除本振频率fm,可得到最终输出信号的表达式如式(7):

研究上式可知,Vout与fm满足余弦函数关系,其周期由臂长差l1-l2决定。因此,只要测得相邻两个Vout为0 的频点fm1与fm2,通过这两个值,可以计算出臂长差为:

1.2.2 范围与精度
干涉式水听器两臂长度差通常在0.3~150 m 之间。设置系统可测量臂长差范围为0.15~200 m,根据式(8)可得微波源扫频信号fm1-fm2应在0.5~690 MHz范围内。扫频信号带宽大于或等于700 MHz 时可满足系统要求。
为满足极限精度要求,以测量精度为1 mm,臂长差为200 m 为例,此时需要微波源的扫频信号频率误差不大于5×10-6Hz。
2 硬件电路实现
2.1 产品组成
微波干涉式水听器臂长差测量硬件可分为如下组件:
1)光源:SLD 光源;
2)电光强度调制器:Mach-Zehnder 调制器;
3)干涉式水听器:支持Mach-Zehnder 水听器和Michelson 水 听器[6];
4)光电探测器:PIN 型光电探测器;
5)上位机:个人电脑;
6)移动终端:具有蓝牙接口的智能手持终端;
7)数字电源:可调数字电源;
8)臂长差射频板:产生扫频微波调制信号,采样光电信息;
9)电源板:系统供电。
2.2 电源板设计
电源板需要为整套采样系统提供稳定电源。电源板输入为+12 VDC。为臂长差射频板提供+6 V电源输出,为电光强度调制器(EOM)提供+10.5 V和+8 V 电源输出,为光电探测器提供±15 V 电源输出。其中较大的电源:一种为输出电压+15 V,电流不小于1 A;另一种为输出电压+6 V,电流不小于2 A。电源板满足工业级使用环境要求。
2.3 臂长差射频板设计
2.3.1 板卡概述
根据系统要求,臂长差射频板应具有以下功能:
1)微波扫频范围为1.7~2.4 GHz(频率宽度不小于700 MHz),输出功率为18 dBm@2 GHz;
2)微波扫频频率误差不大于5×10-6Hz;
3)采样范围为1~3 GHz;
4)RS232 串口通信,支持波特率为19 200 b/s;
5)支持bluetooth4.0。
臂长差射频板设计的关键点为射频电路部分的设计工作,含微波信号源设计、采样滤波器设计。微控制器的信号采集、串口通信以及上位机软件解算功能可采用通用设计方案。
2.3.2 微波信号源
微波射频信号[7]通过电光强度调制器对激光进行调制。相位噪声低、频率稳定性高的微波信号,是激光调制的前提条件。同时,微波信号还应该具备连续调节的能力,即具备按照步进扫频输出的能力。由文献[8]可知,具备相位噪声低、频率稳定性高特点的介质谐振器,调频范围过小;调频范围大的介质谐振器,相位噪声和频率稳定性难以满足要求。该方法选用ADI 公司的微波芯片压控振荡器(VCO)配合锁相环(PLL)结构,输出既能保证相位噪声低、频率稳定性高,又能保证调频范围足够宽的微波调制信号。
该硬件实现方法中锁相环(PLL)结构[9]如图2 所示。该结构主要由输入参考频率分频器(1/R)、鉴相器(PD)、环路滤波器(LPF)、压控振荡器(VCO)和分频器(1/N)五部分组成。
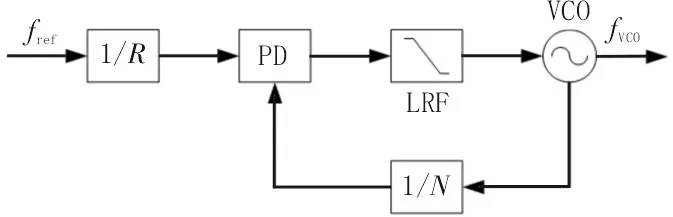
图2 集成VCO的PLL结构
各个部分的作用如下:
输入参考频率分频器(1/R):对输入的频率信号进行分频,分频系数可调;
鉴相器:比较输入端两个频率的相位差;
环路滤波器[10]:锁相环最重要的组成部分,控制环路的稳定性和动态响应,抑制带内外杂散和噪声。一定程度上,环路滤波器决定了锁相环结构的传输特性;
压控振荡器:输出频率随输入控制电压的变化而变化的振荡电路。输出相噪低、稳定性高的连续步进扫频信号;
分频器(1/N):对压控振荡器输出的频率信号进行分频,分频系数可调。
该设计中,采用ADI 公司的一款集成VCO 全功能小数N分频锁相环芯片HMC833[11]搭配环路滤波器完成高精度、低相噪微波信号源[12]。
HMC833包括一个提供23 MHz~3 GHz输出的集成式低噪声VCO、一个用于低压VCO 调谐的自校准子系统、一个超低噪声数字鉴相器(PD)、一个精密控制电荷泵、一个低噪声参考路径分频器和一个小数分频器。
HMC833可达到如下指标:RF带宽为25~3 000 MHz;鉴相器速率为100 MHz;超低噪声为-110 dBc/Hz;品质因数为-227 dBc/Hz;抖动小于180 fs RMS;24 bit 步进,分辨率为3 Hz;精确频率模式;内置数字自测功能。
HMC833 没有集成环路滤波器,需要单独设计环路滤波器[13]。先分析环路滤波器的设计需求。设分频器(1/R)的频率为1 Hz,推导锁相环电路的传输特性,经拉普拉斯变换,可以得到如下表达式:

其中,θv是压控振荡器输出频率信号的相位值,θi是输入参考频率信号的相位值,Kd是鉴相器的增益,Kv是压控振荡器的增益,F(s)是环路滤波器的传输特性函数,N是分频器(1/N)的分频参数。
可以看到,锁相环电路属于负反馈系统。环路滤波器的响应特性F(s)决定了系统的开环特性。恒定导致-90°相移。因此在设计锁相环结构环路滤波器时,需要谨慎考虑相位问题。环路滤波器需要预留30°~50°的相位预量[14]。
该设计中采用预留较大相位预量的无源滞后超前滤波器,环路滤波器电路如图3 所示。根据仿真结果可知,可达到44.1°的相位预量。环路滤波器仿真结果如图4 所示。微波信号仿真结果如图5 所示。
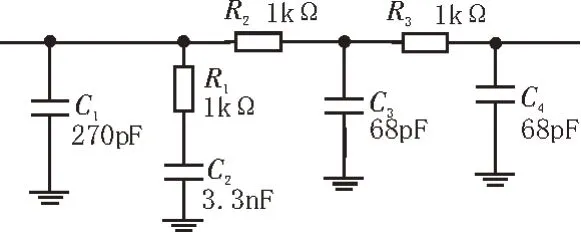
图3 环路滤波器电路
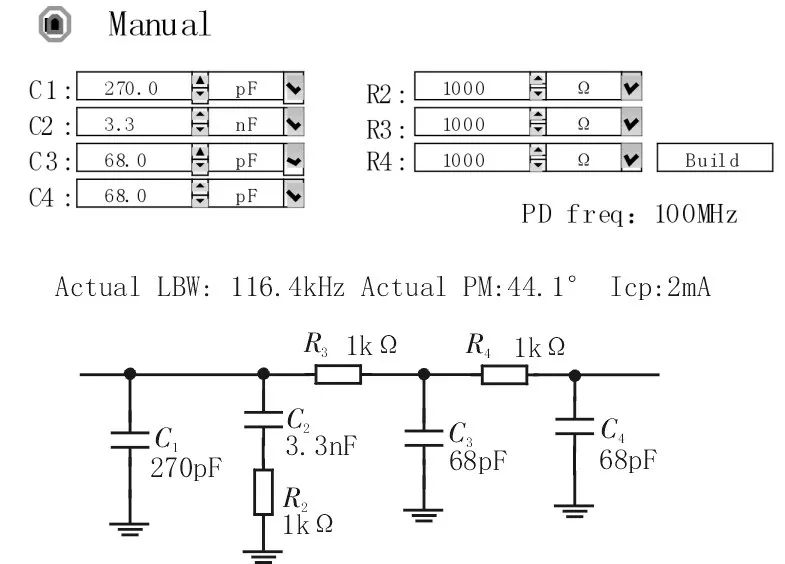
图4 环路滤波器仿真结果
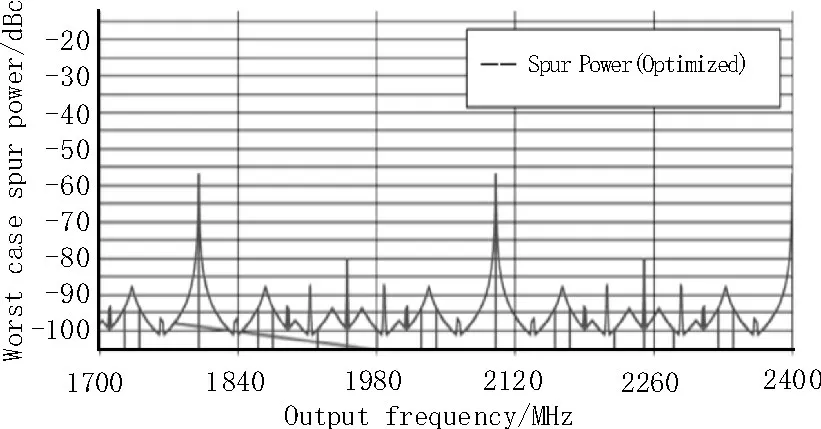
图5 微波信号仿真结果
2.3.3 采样滤波器
干涉式水听器输出的激光信号携带了臂长差信息,经光电探测器由光强信号转换成电信号,进入臂长差射频板。臂长差射频板完成对电信号的滤波、移相和信号采集。具体包含以下电路:采样滤波电路、微波放大电路[15]、信号解调电路和AD 采样电路。
经过采样滤波器滤波,减小信号中的带外噪声,提高微波信号的信噪比,才能进入微波放大电路。该系统的工作频段在1.7~2.4 GHz 之间,频率宽度不小于700 MHz。倍频覆盖范围为3.4~4.8 GHz。根据此要求,采样滤波器通带拐点的频率需大于2.4 GHz,阻带拐点的频率需小于3.4 GHz。比较常规的低通滤波器有源滤波器、切比雪夫无源滤波器、巴特沃斯无源滤波器。切比雪夫I 型低通滤波器[16]在过滤带衰减快,在通频带等幅起伏,而且比巴特沃斯滤波器需要的阶数少,具有更高的矩形系数。另外,切比雪夫I 型滤波器的极点大体分布在椭圆轨迹线上,而非单位圆上,具备比巴特沃斯滤波器更高的系统稳定性。可见切比雪夫I型低通滤波器更加符合设计需求。
根据ADI公司仿真工具得到的仿真结果如图6-8所示。可确定七阶切比雪夫I 型低通滤波器满足设计需求。其中,滤波器频率拐点设置为2.6 GHz,源端阻抗和负载端阻抗按照常规设置为50 Ω,带内纹波的阈值设置为1 dB。
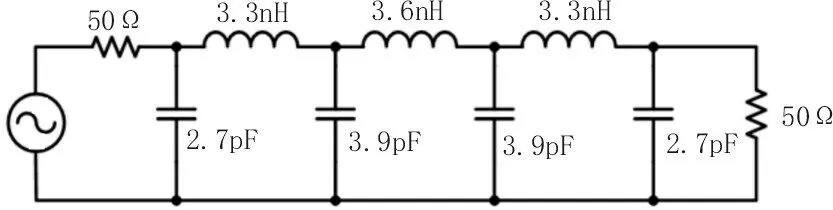
图6 七阶切比雪夫I型低通滤波器
微波调制信号的频率较高,PCB 布板时,走线的寄生电容也会影响采样滤波器性能。所以仿真设计得到的参数只能作为一个参考。
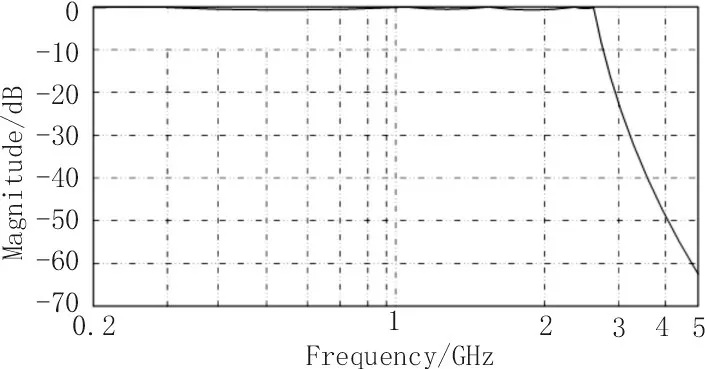
图7 低通滤波器频率响应图
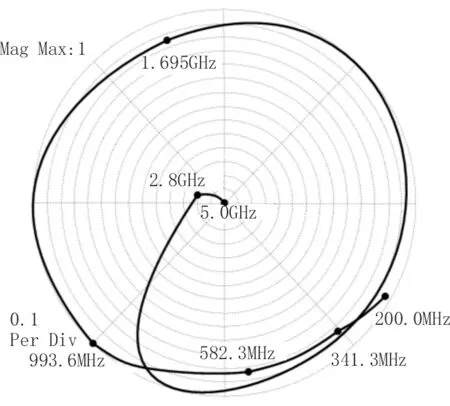
图8 低通滤波器极点分布图
2.3.4 其他电路
选用STM32F373 作为控制芯片,实现微波源参考频率、串口RS232 通信、蓝牙通信、微波源控制、外部通信、内部通信等功能。
该芯片主要有以下特点:采用ARM 架构32 位Cortex™-M3 内核;72 MHz 运行频率;3 个16 位模数转换,多达21 个通道;12 个DMA 通道;3 个USART通道;3 个SPI 通道;11 个定时器;256 kbytes FLASH。
该芯片具有较强的处理能力,内部集成了丰富的接口,外围电路简单,功能扩展空间大,技术成熟可靠。
3 实物验证结果
该方案硬件电路中,STM32 控制器控制微波源以3 Hz步进向M-Z光强调制器连续发射1.7~2.4 GHz的扫频信号,对进入水听器的激光进行调制。激光经水听器两臂反射后,形成带臂长差信息的干涉光信号。光电探测器将光信号转换成电信号,经采样滤波器滤波后,由STM32采集混频功率信息。STM32将采集到的混频信息通过串口发送至上位机数据解码软件,转换为干涉光谱的波峰波谷,并换算出真实臂长差数据。
经实际测量,臂长差为0.15 m 时,测量精度可达±0.01 mm;臂长差为200 m时,测量精度可达±0.2 mm。由此可得,该方案硬件方案测量误差可控制在10-6量级。
4 结论
该文介绍的微波干涉式水听器臂长差测量的硬件实现方法,其扫频电路、环路滤波、采样滤波、射频放大、功分移相等各个电路环节都经过了多方对比分析与仿真。其测量长度、测量精度可覆盖光纤阵缆公司通用的测量检验需求。经实物测量,与国外进口水听器臂长差测量设备相比,具有覆盖性全、测量精度高、成本低的特点,是一种较好的硬件实现方案。