激光导引AGV 导航故障分析及维护
2022-09-11张发讯李海军韩泽楷
张发讯,李海军,牛 鑫,韩泽楷
(云南白药集团健康产品有限公司,云南昆明 650504)
0 引言
AGV(Automated Guided Vehicle,自动导向车)在智能制造领域自动化物流系统中起到关键作用,它代替人工重复搬运的工作,减少人工成本,解决人工搬运货物的安全问题。
1953 年一台由拖拉机改造的设备在一间杂货仓库沿着布置在空中的导线运输货物,这标志着AGV 的诞生。随后AGV 小车相关研究逐步发展,20 世纪80 年代末国外的AGV 达到发展的成熟阶段。中国AGV 发展历程较短,为改变长期依赖进口的局面,国家加大在AGV 领域的投入,经过不懈的努力在AGV 领域取得一定的成效。1995 年AGV 技术出口韩国,标志着自主研发的机器人技术第一次走向了国际市场。1996 年,利用NDC 技术生产了第一套AGV 验证系统,这是中国制造的第一台激光导引AGV 以及第一台全方位运动AGV 小车。随后激光导引型AGV 不断完善,得利于其定位精度高,行驶路径灵活多变,能适用于各种环境等优点得到广大用户的认可。随着“工业4.0”和“中国制造2025”这两个概念的提出,AGV 具有长时间搬运、搬运量大、柔性高、搬运路线多变等优势深受各大智能制造企业的青睐。目前,激光导引、磁带导引以及二维码导引成为国内AGV 产品主要的导航方式[1]。
激光导引AGV 通过参照物不同又分为环境导航方式和反射板导航方式。环境导航方式是通过提前对AGV 运行环境一些固定不变的物体进行测量,作为AGV 行驶过程中的参照物来确定AGV 的位置;反射板导航方式是预先在AGV 运行环境中布置好反射板,通过测量计算每一块反射板在布局中的坐标,以反射板作为AGV 运行的参照物。环境导引方式对环境要求比较高,反射板导航方式适用于大部分场所[2]。
1 激光导航原理简介
为了让AGV 准确定位自己在布局中的位置,需要事先对该环境进行特殊处理。首先在AGV 运行环境中布置反射板,然后把安装在AGV 上的激光扫描器LS2000 调平。在设计AGV 的时候会定义一个参考点为坐标原点,建立一个车辆的坐标系,通过测量激光扫描器中心点到参考点的距离得到激光扫描器在车辆坐标系中的坐标,AGV 设计时以两个后轮的中心点为坐标系原点如图1 所示[3]。此外把激光扫描器坐标写入车辆控制器中,再通过测量软件连接上AGV,手动牵着AGV 行走,LS2000 发射激光并接收反射板反射回的光束,测量软件通过计算反射光线的夹角和距离可以确定反射板的位置,激光扫描器接收到反射板返回的光线如图2 所示。这样便可以得到各个反射板的坐标,再把这个反射板坐标文件导入到布局设计软件中就可以得到一个二维坐标系的布局。在这个布局里面设计好AGV 的行走路线并导入车辆控制器和上位电脑中,AGV 沿着设计的路径行驶,激光扫描器连续的测量与反射板的角度和距离,车辆控制器通过这些数据结合AGV的驱动、转向编码器的反馈值就可以计算出AGV 在整个布局中的位置。车载控制器和LS2000 的通信连接关系如图3 所示[4]。
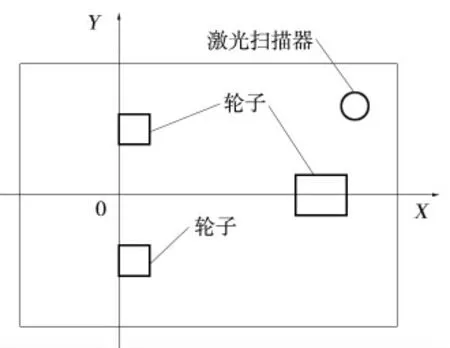
图1 AGV 设计时以两个后轮的中心点为坐标系原点

图2 激光扫描器接收到反射板返回的光线

图3 LS2000 与车载控制器的通信连接关系
2 导航原理分析
通过上述AGV激光导航的原理可以得出:
(1)反射板的位置一经固定测量后坐标就是唯一的。
(2)LS2000 安装固定后其坐标相对于车体是不变的。
(3)LS2000 是通过发射激光并接收反射板的反射光线来确定AGV 在布局中的坐标的。
由此可见,反射板激光导航方式虽然定位精度高,但是需要在AGV 运行环境中安装大量反射板并且受反射板位置限制。
3 故障分析及故障处理
在云南白药生产物流现场遇到过很多AGV 丢导航的实例。通过3 个实例结合激光导航原理分析造成AGV 导航丢失或导航精度下降的情况,并给出导航维护的方法。
(1)由于生产需要,现场设备的摆放位置不能绝对固定,需要时进行调整。因此导致AGV 每次经过这个设备时会丢导航。
故障原因及处理办法:经过现场观察分析激光扫描器识别到的反射板数据(表1)。发现该设备上安装了一块反射板,但激光扫描器并没有测到这块反射板的数据。经过对激光导航原理的分析结合实际情况得出结论,由于设备移动了位置,反射板位置也发生变化,AGV 在使用的布局中这块反射板的位置与实际位置产生偏差,因此AGV 不能识别这块反射板,从而导致经过该机组时丢失导航信号。所以在使用AGV 时要注意反射板的安装位置,如果反射板位置发生变化,需要及时对反射板重新测量并把新测量后的文件输出到车辆控制器中,测量后激光扫描器在该点识别到的反射板数据见表2。

表1 移动机组后AGV 丢导航的数据

表2 重新测量反射板后AGV 在同一个点识别到的放射板数据
(2)使用环境的变化。例如:地面潮湿、地面坑洼等外部原因,AGV 在使用半年后发现在站台装卸货时偏差较大。
故障原因及处理办法:通过对AGV 吊装检查时发现胶轮腐烂磨损严重,更换轮子后AGV 在站台装卸货时没有再出现偏差过大的问题。由此可见轮子磨损导致车身倾斜,激光扫描器的坐标发生变化,收到反射板反回的光线角度和距离发生改变,所以AGV 移动的位置会出现偏差。因此在使用过程中要定期对AGV 驱动轮和支撑轮检查,及时更换损坏的轮子,保证AGV 正常工作。
(3)有2 台AGV 在使用一段时间后发现总是不定点的导航丢失,其他车辆工作正常没出现丢导航的情况。
故障原因及处理办法:观察发现丢导航的AGV 激光扫描器镜面已经覆盖一层粉尘,用干净的棉布擦拭干净后AGV 便不再出现丢导航的情况。由此可见激光扫描器镜面污染会导致接收不到反射板的光线。为了验证反射板被污染,反光性下降导致激光扫描器不能识别到反射板,模拟了一个实验,实验数据见表3。首先测出正常情况下反射板的数据(表3 的数据1),把一块反射板完全遮挡再测量此时的反射板数据(表3 数据2),把反射板表面污染使得反光性下降在测量此时的反射板数据(表3 数据3),把这3 组数据做对比可以得出结论,当反射板被遮挡、或被污染导致反光性降低时也会导致AGV 丢导航。所以在日常使用中要注意清洁激光扫描器的镜面,并保证反射板不被遮挡,如果发现反射板表面泛黄,反光性降低的要及时更换。

表3 三种情况下测量得到反射板的数据
4 结束语
通过上述实例以及激光导引的原理可以得出以下结论:①反射板位置变化,实际位置和测量位置的坐标不一致,导致AGV 丢导航;②如果轮子磨损严重,激光扫描器倾斜也会导致导航精度降低或者出现丢导航的情况;③反射板表面泛黄反光性降低、反射板被遮挡或者激光扫描器的镜面污染,激光扫面器接收不到反射板返回的光线,就会出现导航精度低或者丢导航的情况。因此在AGV 的使用和维护时也要注意对AGV 导航环境的维护,及时发现问题,才能保证生产顺利进行。