未来无人驾驶汽车的传感器方案发展趋势(上)
2022-09-09安徽程增木
◆文/安徽 程增木
无人驾驶汽车系统主要包括感知、定位、决策、规划、控制等模块,感知模块是无人驾驶汽车的“眼睛”,其将感知的结果传输给后续模块供其使用。感知模块主要使用的传感器包括摄像头、激光雷达和毫米波雷达等传感器。本文重点介绍激光雷达和摄像头。
一、激光雷达传感器的组成及工作原理
激光雷达是利用可见光和近红外光(多为950nm波段附近的红外光)发射一个信号,经目标反射后被接收系统收集,通过测量反射光的运行时间而确定目标的距离。激光雷达具有高分辨率、强抗干扰能力、可全天时工作、信息量丰富的优点,可应用于无人驾驶汽车中,但是其容易受到大气条件以及工作环境的烟尘的影响。
激光雷达主要由激光发射系统、激光接收系统、信息处理系统和扫描系统四部分组成,其结构示意图如图1所示。
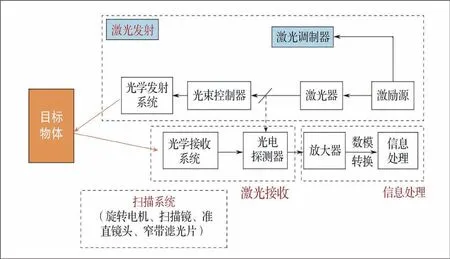
1.激光发射系统
激光发射系统的激励源周期性地驱动激光器,发射激光脉冲,利用激光调制器通过光束控制器控制发射激光的方向和线数, 最后通过光学发射系统将激光发射至目标物体。
2.激光接收系统
激光接收系统经光学接收系统光电探测器接收目标物体反射回来的激光, 产生接收信号。
3.信息处理系统
信息处理系统将接收信号经过放大处理和数模转换后, 由信息处理模块计算,获取目标表面形态、 物理属性等特征, 最终建立物体模型。
4.扫描系统
扫描系统以稳定的转速旋转,实现对所在平面的扫描,并产生实时的平面图信息。
激光雷达的工作原理与雷达非常相近,以激光作为信号源,由激光器发射出的脉冲激光,打到地面的树木、道路、桥梁和建筑物上,引起散射,一部分光波会反射到激光雷达的接收器上,根据激光测距原理计算,就得到从激光雷达到目标点的距离。脉冲激光不断地扫描目标物,就可以得到目标物上全部目标点的数据,用此数据进行成像处理后,就可得到精确的三维立体图像。
在激光雷达前端有一个光学发射和光学接收系统,在发射系统后端有N组发射模块,在接收系统后端也有N组与发射模块对应的接收模块。当激光雷达开始工作时,N组发射模块和N组接收模块在系统电路的精确控制下,按照一定的时间顺序轮流工作,发射和接收激光束。编码器是一种用于运动控制的传感器,它利用光电、电磁、电感等原理,检测物体的机械位置及其变化,并将此信息转换为电信号作为运动控制的反馈,传递给各种运动控制装置。光学旋转编码器属于编码器中较为特殊的一种,它通过光电转换,可将输出轴的角位移、角速度等机械量转换成相应的电脉冲以数字量输出,可以精确地测试电机角位移和旋转位置。旋转电机带动扫描镜按照一定的顺序和速度旋转,将激光器发出的激光束发射出去,然后反射回来的激光束通过光学接收系统进行处理计算,这样就可以形成光学扫描,其工作原理如图2所示。

摄像头是光线通过镜头进入摄像头内部,然后经过红外滤光片过滤红外光,最后到达光感传感器(主要包括CMOS和CCD两种),光感传感器可以将光学信号转换为电信号,再通过内部的模数电路转换为数字信号,然后传输给控制器。摄像头具有成本低、结构简单、感知距离远、视角范围大等优势,但是其受周围光线影响交大,容易受到光源及环境的干扰。
视觉传感器主要由光源、镜头、图像传感器、模/ 数转换器、图像处理器、图像存储器等组成,其主要功能是获取足够的机器视觉系统要处理的原始图像,如图3所示。
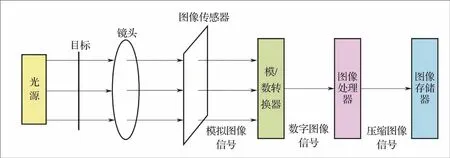
光源是一个物理学名词,世界上的物体有的发光,有的不发光,我们把能够自行发光且正在发光的物体叫作光源,如太阳、打开的电灯、燃烧的蜡烛等都是光源。
镜头是视频传感器的关键部件,它的质量好坏直接影响着摄像头的指标。镜头相当于人眼的晶状体,如果没有晶状体人眼看不到任何物体。 如果没有镜头,那么摄像头所输出的图像就是白茫茫的一片,没有清晰的图像输出。
图像传感器通常使用电荷耦合器件(CCD)或互补金属氧化物半导(CMOS) 技术将光转换为电信号。图像传感器的任务本质上就是采集光源并将其转换为平衡噪声、灵敏度和动态范围的数字图像。图像是像素的集合,暗光产生暗像素,亮光产生较亮的像素。图像传感器能够确保摄像头具有正确的分辨率以适合应用,分辨率越高,图像细节越高,测量准确度越高。
模/数转换器即通常所说的A/D转换器,是将模拟信号转变为数字信号的电子元件,能够把输入的电压信号转换为输出的数字信号。
图像处理器是一个进行分类、合成等处理的软件。它通过取样和量化过程,将一个以自然形式存在的图像变换为适合计算机处理的数字形式,包括图片直方图、灰度图等的显示。图片修复,即指通过图像增强或复原来改进图片的质量。
图像存储是指各种图形和影像在存储器中最多可以存储多少帧的视频信号。数字图像文件存储方式主要有位映射图像、光栅图像以及矢量图像等。
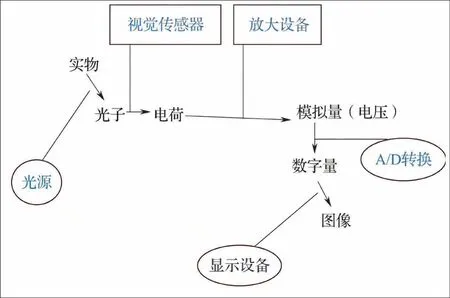
车载视觉系统是能够让汽车具备视觉感知功能的系统,利用视觉传感器获取周边环境的图像,并通过视觉处理器进行图像的分析和理解,进而转换为相应的定义符号,使汽车能够辨识并确认物体位置及各种状态。被拍摄的物体经过视觉传感器的镜头聚焦到视觉传感器上面,视觉传感器由多个X-Y纵横排列的像素点组成,每个像素点都由一个光电二极管及相关电路组成。光电二极管将拍摄到的光线转变成对应的电荷,在相关电路的控制下逐点输出,经放大、A/D转换,然后形成数字视频信号输出,最后通过显示屏还原后,就可以看到和拍摄场景一样的图像了,如图4所示。
在2021年的广州车展中,不少车企展出了搭载激光雷达的车型,主要包括小鹏G9、沙龙机甲龙、哪吒S、飞凡R7、极狐阿尔法S全新HI版。为什么激光雷达越来越多的搭载在即将量产的车型上?首先,激光雷达具备分辨率高、稳定、可采集三维数据等优势,激光雷达点云经过处理后可以获得目标的距离、角度、反射强度、速度等信息,生成目标的多维度图像,并且激光雷达可全天时工作,相比于毫米波雷达,激光雷达可实现对金属物体的检测,并且相比于摄像头,激光雷达的探测距离更远。从技术角度来说,激光雷达可以弥补摄像头和毫米波雷达的不足,满足后续高阶自动驾驶的系统要求。
现在给大家展示的车型有可能是以后各位读者接触到的高阶自动驾驶版车型,大家阅读后可以了解到硬件传感器配置方案和应用场景,有助于各位对无人驾驶有一个初步的了解。
让我们看一下,近两年搭载激光雷达车型(以后你可能买到的车型)在技术和应用场景两方面有什么亮点吧。笔者将从市场表现以及技术两方面分析本次新推出车型的无人驾驶感知系统传感器性能表现。
各家主机厂的传感器配置、应用功能及场景如表1所示。

