基于I/F起动和扩展卡尔曼滤波的永磁同步电机全速域无传感器控制方法*
2022-09-01赵毅恒宁博文卢少武
赵毅恒, 宁博文, 卢少武, 刘 江
(武汉科技大学 冶金自动化与检测技术教育部工程研究中心,湖北 武汉 430080)
0 引 言
永磁同步电机(PMSM)以其结构简单、体积小、重量轻、效率高的特点,广泛应用于各种领域。随着永磁材料技术的不断提高,对PMSM的研究也不断成熟,电机性能不断提高。PMSM的控制需要检测转子的位置,一般是通过在电机轴上安装速度传感器来获取转子位置和速度信息。由于速度传感器受工业环境的限制和生产成本的影响,采用无速度传感器控制已经成了当下研究的热点[1]。
当前常见的无传感器控制算法有传统滑模观测器算法[2-3]、模型参考自适应算法[4]、扩展卡尔曼滤波器(EKF)算法[5-6]等。卡尔曼滤波器是在线性最小方差估计基础上发展起来的一种递推算法,在系统噪声和测量噪声均存在的情况下依然能保持系统的准确观测。EKF算法则是卡尔曼滤波算法在非线性系统的扩展应用,适合电机中高速范围内的速度估计。
电机运行在零速和低速时,有用的信噪比较低,导致EKF算法在电机起动时对转子位置和速度的检测会失效。在需求量庞大的家电领域,例如洗衣机、空调这类对电机低速起动没有严格限制,但对高速调速性能有一定要求的场合,可以采用恒电流频率比(I/F)进行电机低速的起动。I/F起动策略是一种电流闭环、转速开环的控制,通过在原有的同步坐标系中给定一个新的电流旋转矢量,使给定的电流矢量恒加速旋转至指定速度,带动电机的转子旋转,到达指定速度后电机的转速围绕给定转速波动并逐渐收敛至给定值,以完成I/F起动过程[7-8]。
由于I/F起动给定的角度和EKF估计的角度存在角度差,直接进行两种状态的切换会使电机转矩产生较大的波动,影响系统稳定[9]。为此,本文通过设计反馈调节器,以该角度差作为反馈输入以达到减小切换过程中给定电流和角度差的目的,同时避免切换过程中电流减小带来的角度差的波动,保证切换的顺利进行,并通过仿真验证该方法的可行性和有效性。
1 PMSM数学模型
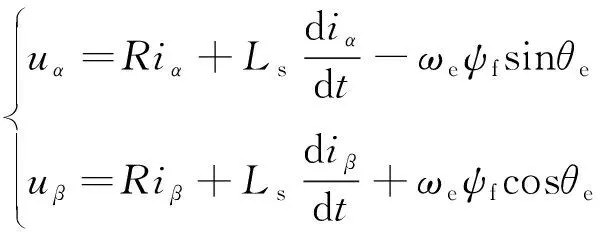
本文采用表贴式PMSM设计无速度传感器控制算法,表贴式PMSM在三相静止坐标系α-β下的数学模型为
(1)
式中:uα、uβ、iα、iβ分别为电机两相静止坐标系α、β轴下的电压和电流;R、Ls、ψf分别为定子电阻、定子电感和永磁体磁链;ωe、θe为分别为电机的电角速度和转子电角位置。
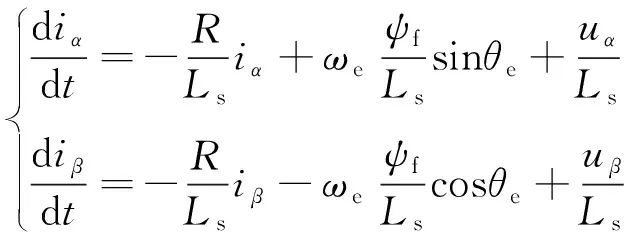
将式(1)变换为电流方程可得:
(2)
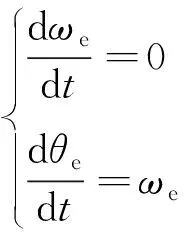
选取iα、iβ、ωe、θe作为状态变量,考虑到电机的机械响应远慢于电气响应,在较小的采样周期内转速可以认为近似不变,可以得到
(3)
进一步可以得到状态空间方程为
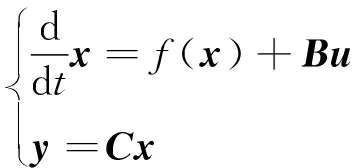
(4)
为构建EKF,将状态空间方程(4)离散化得到:

(5)
式中:V(k)为系统噪声;W(k)为测量噪声。
2 EKF
本文应用EKF观测电机速度和转子位置,实现电机中高速运行阶段的无传感器闭环控制。EKF是卡尔曼滤波器在非线性系统的应用,通过将非线性系统进行局部线性化,再进行跟踪,实现对目标状态最优估计。EKF的状态估计大致分为两个阶段,第一阶段是预测阶段,第二个阶段是校正阶段[10],具体分为以下六个步骤:

(6)


(7)
(3) 计算协方差矩阵:

(8)
式中:F(k)为雅可比矩阵;Q为系统噪声V的协方差矩阵。
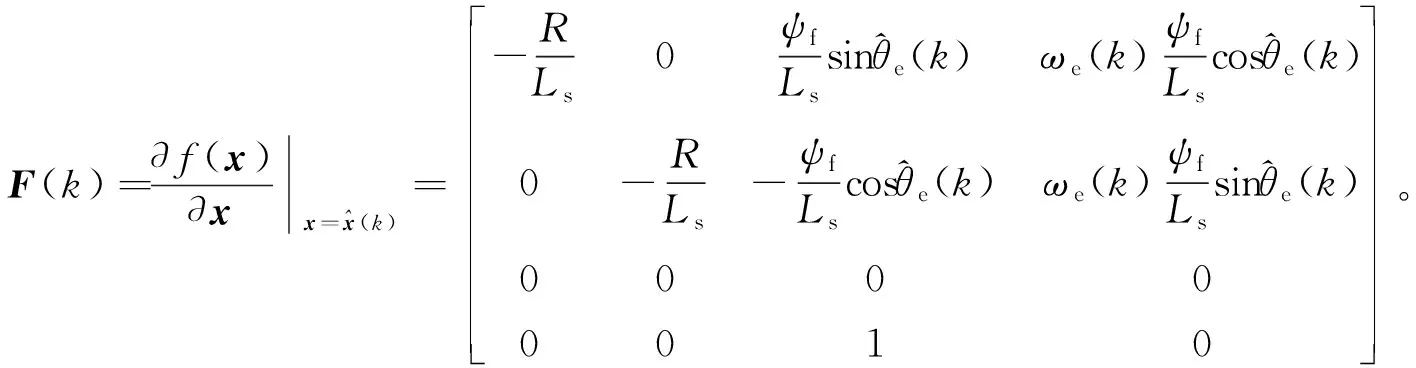
(4) 计算增益矩阵:

(9)
式中:R为测量噪声W的协方差阵。
(5) 状态矢量估计:

(10)
(6) 计算估计误差协方差矩阵:

(11)
由于系统的干扰噪声和测量噪声是随机的,实际运用中对于系统和测量噪声的协方差矩阵一般通过经验和仿真确定,选择的数值对算法的收敛性及估计精度有很大的影响,本文通过仿真调试后选择给定参数为
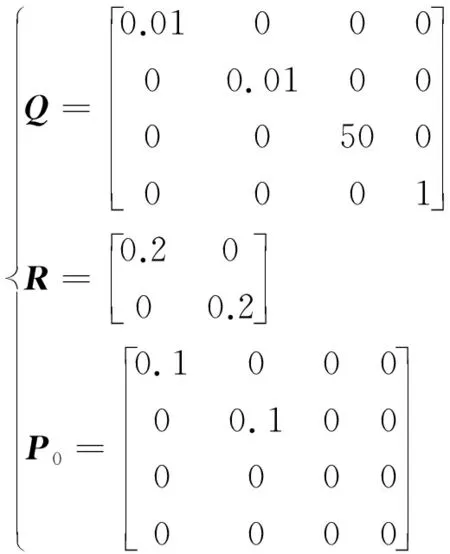
(12)
3 基于转矩电流自平衡的无传感器起动过渡控制策略
3.1 I/F起动策略

(13)
PMSM转矩方程为
Te=1.5pIsψfsinδ
(14)
运动方程为
(15)
式中:δ为电机的功角,δ=θ1-θ2;速度n*=at;p为磁极对数;a为电机起动加速斜率;Is为定子电流,当Te-Tl=0时刻,电角度为θl。
电机起动时,随着δ角度不断增大,电机转矩增大,当δ大于θl时,电机开始加速,当δ小于θl时,电机减速。这种“转矩-功角自平衡性能”,使得电机起动时围绕给定速度加速运动,当给定的速度过大,超过最大起动速度时电机会失步。由于给定加速度的突变会导致超调,加速过程采用变加速的方式起动,在给定速度加上一阶惯性环节:
(16)
式中:Tc为惯性环节时间常数。
惯性环节使得给定速度平滑地达到指定速度,可以有效减少电机达到指定速度时的超调。图1是电机开始起动时刻,即Te=Tl时电流矢量图。
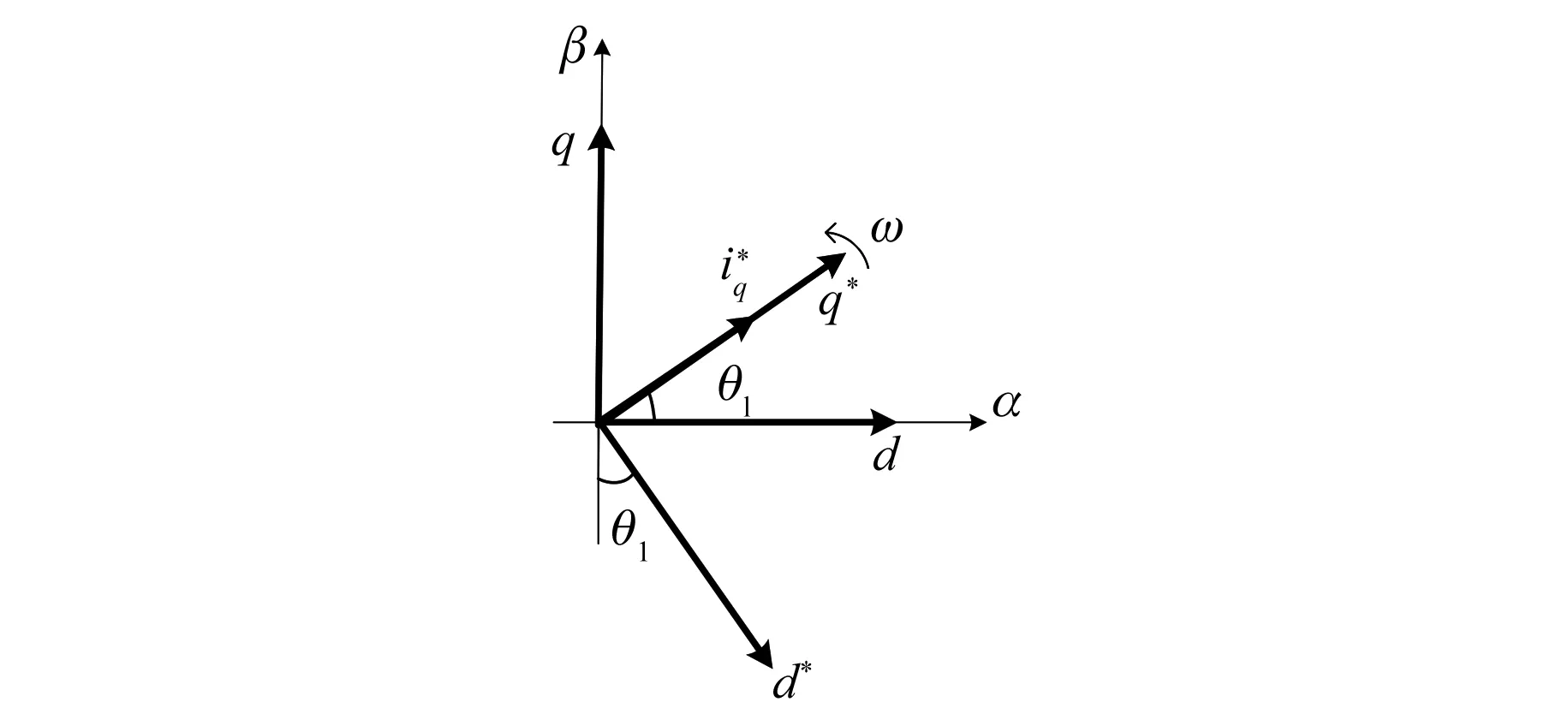
图1 电机起动时电流矢量图
3.2 转矩电流自平衡切换策略分析
I/F控制采用的是速度环开环、电流环闭环的控制方式,EKF控制是电流速度双闭环控制。在两种控制方法切换时,I/F起动位置角的给定θ*需要切换为EKF估计的位置角θekf,两者相差的电角度为
θerr=θekf-θ*
(17)
根据转矩公式(14)可知强行切换电流和角度时,角度的突变会导致电流和转矩有很大的脉动。所以在切换的过程中,需要减小q轴电流,使切换前后电流接近,并使I/F起动给定的电流矢量在实际的q轴上的电流分量尽可能的大[12]。

(18)
在常规方法中ks的取值越大,切换时间越短,转速波动随之变大。在给定电流减小到一定值后切换到闭环控制,此过程由于电机到达切换转速时,闭环后实际的q轴电流未知,如果电流过小可能会导致电机出现失步,故减小的电流值不能设定的过小。同时当电流减小后直接切换到速度闭环控制,会导致转矩突变,对电机的稳定运行十分不利,若再缓慢减小角度误差,会使过渡时间太长,不利于实际运行。
为此本文提出一种改进方法,考虑到切换电流和两者输入角度差的关系,在I/F控制起动达到匀速阶段后,电机负载不变时,根据“转矩-功角自平衡”,由式(14)可知在一定范围内控制电流和功角δ的关系成负相关且两种切换前后的角度差为
(19)
因此,可以通过对θerr反馈调节来减少给定电流的大小,并使得θerr减小,达到同时减小给定电流和θerr,最终收敛到id=0控制点的目的。图2是过渡过程中给定电流所在的给定轴旋转的角度θ1带动电机转子实际转过的电角度θ2时的矢量图。电机无传感器控制中实际的位置角θ2由EKF估计的位置角θekf得到。
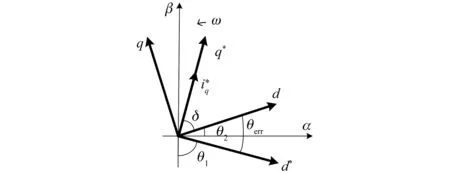
图2 过渡过程电流矢量和实际转子位置示意图
对于表贴式PMSM,转矩的极值通过对式(14)求导,可得电机的最佳控制点为
(20)
求得此时位置角度差
(21)
θerr min=0
(22)
由于电机切换过程中转速基本保持不变,可以认为Te=Tl,且为常值,即:
Te=1.5pIsψfsinδ=1.5pIsψfcosθerr
(23)
在id=0的I/F起动矢量控制方式下,Is等于q轴上的电流Iq,可以得出电流Iq与θerr的关系:

(24)
由上述分析可以得到不同的负载情况下Iq-θerr的工作曲线如图3所示。
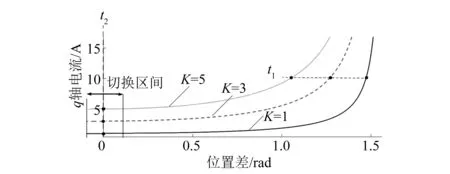
图3 q轴电流和位置角度差工作曲线
图3中t1为切换前过渡过程的开始时刻,此时逐渐减小电流,t2为工作曲线第一次运行到θerr=0的时刻。过渡过程中随着电流的减小,电流变化对θerr的影响逐渐增大,到达t2时刻后工作曲线会在θerr=0工作点附近来回运动,此时若不及时的切换到速度电流双闭环控制,电流很小的波动会引起θerr的振荡,甚至发散。
针对这一问题,通过对反馈调节进行改进,在θerr较大时加大电流反馈调节的作用,在θerr靠近0时减小调节作用。根据这一特点,在PI调节器前增加一个调节器,设定调节器倍率系数为

(25)
n的值越大,对于上述调节作用越明显,λ的取值决定调节器的作用范围。整个负反馈调节过程为
(26)
e(t)=keθerr
(27)

图4为反馈调节器框图,图5为增加调节器后的不同的负载情况下Iq-θerr的工作曲线。

图4 反馈调节器框图
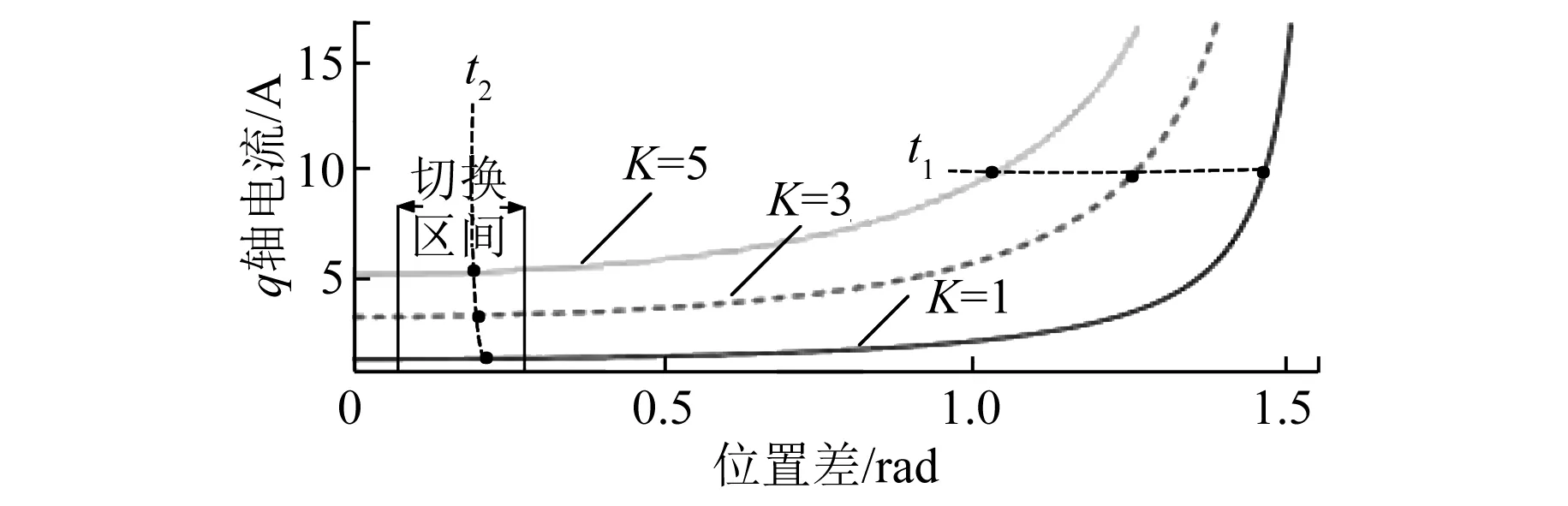
图5 加调节器后q轴电流和位置角度差工作曲线
从图5中可以看出,此方法改变了Iq-θerr曲线上的工作范围,在θerr减小到一定值时会迅速减少反馈调节器的输出,使得t2时刻新的平衡点靠近而不达到θerr=0,并保持q轴电流和θerr稳定的状态,避免了因θerr的极性变化造成θerr发散而导致切换失败的情况。根据新的工作范围,在切换前q轴电流和θerr减小到了一定值且基本保持不变,转矩趋于稳定,同时保证了切换前后的电流相匹配。在无调节器和有调节器情况下,切换前过渡过程q轴电流的对比示意图如图6所示。
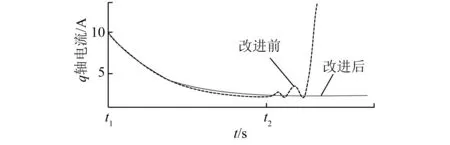
图6 切换前过渡过程q轴电流对比示意图
4 仿真分析
为验证本文提出方法的有效性,在MATLAB/Simulink中搭建基于I/F起动和EKF相结合的PMSM无速度传感器控制系统模型,整个仿真系统框图如图7所示。
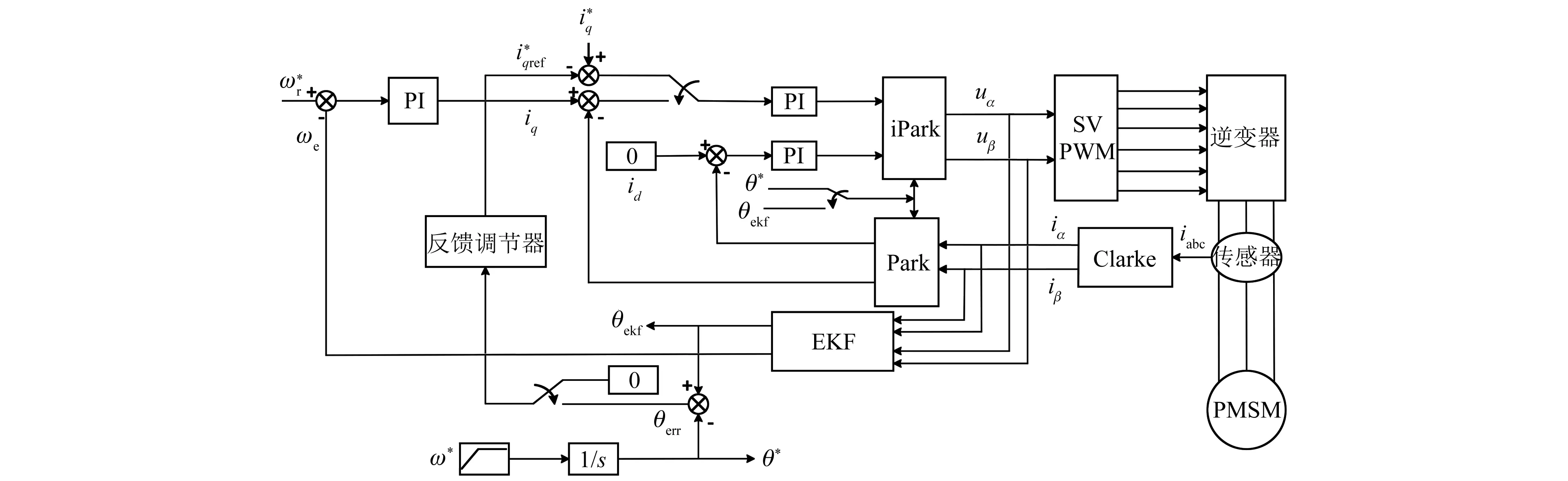
图7 PMSM无速度传感器控制系统框图
中PMSM参数设定为,极对数Pn=4,定子电感Ls=8.5 mH,定子电阻Rs=2.875 Ω,磁链Ψf=0.175 Wb,转动惯量J=0.01 kg·m2,阻尼系数B=0.008 N·m·s。I/F起动给定的加速斜率为a=125.6 rad/s2,初始给定电流为10 A,角度差反馈环节调节器参数取n=3、λ=2,EKF输入为电机在静止坐标系下的定子电压和定子电流,输出为转速和转子估计位置。图8是电机空载和负载Tl=2 N·m时完整运行过程的速度变化情况,I/F起动速度在1 s后达到600 r/min,进入切换状态,在2.5 s后进入电流速度双闭环控制,在3 s给定1 000 r/min,4 s给定800 r/min。
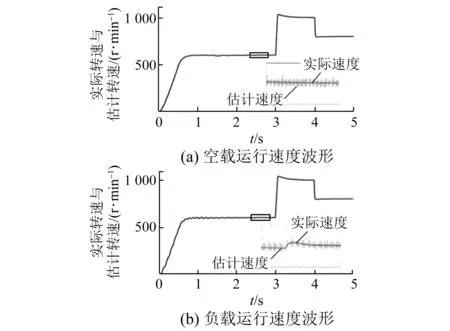
图8 无速度传感器控制系统速度响应波形
图9是在上述负载Tl=2 N·m情况下整个过程q轴电流的变化,图10是电机切换过程中I/F给定位置、EKF观测位置和实际位置。图11是切换状态中的θerr的变化。可以看出,在反馈调节器的作用下,位置角度差随着电流的减小自动减小,在θerr靠近0前趋于稳定,切换前后电流基本保持一致。
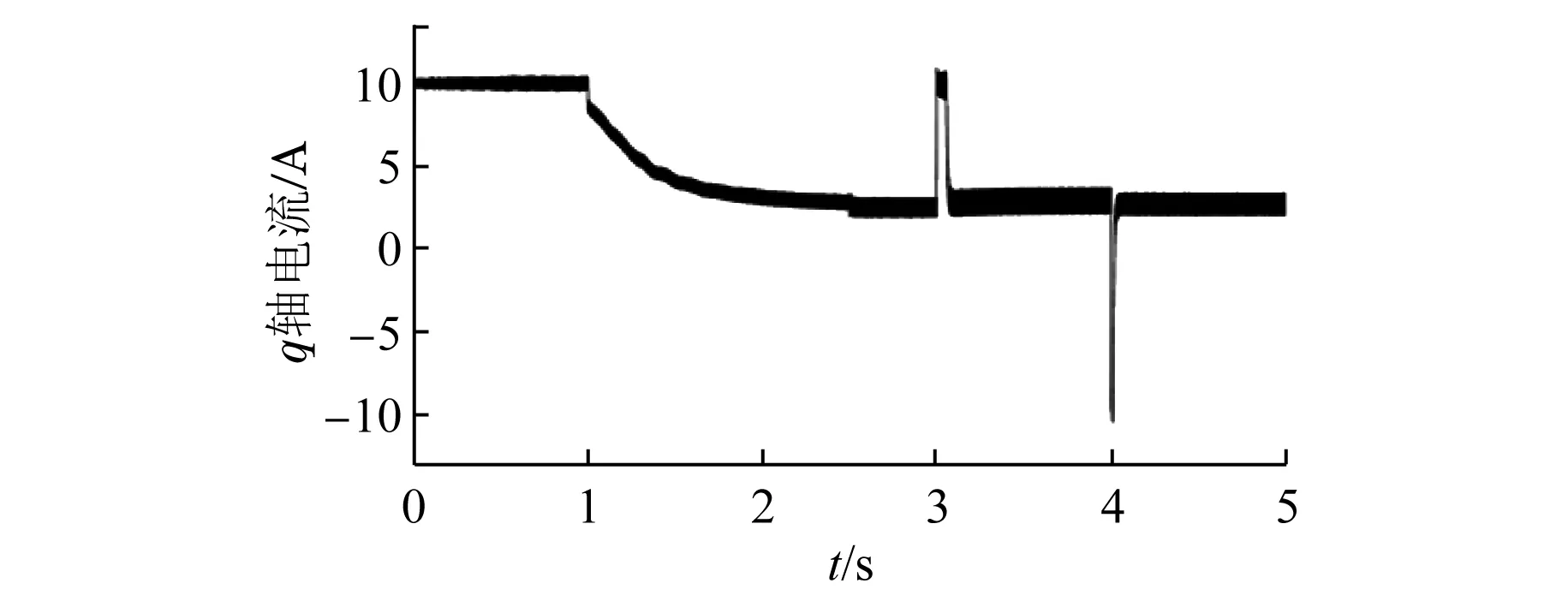
图9 起动和加速减速全过程q轴电流
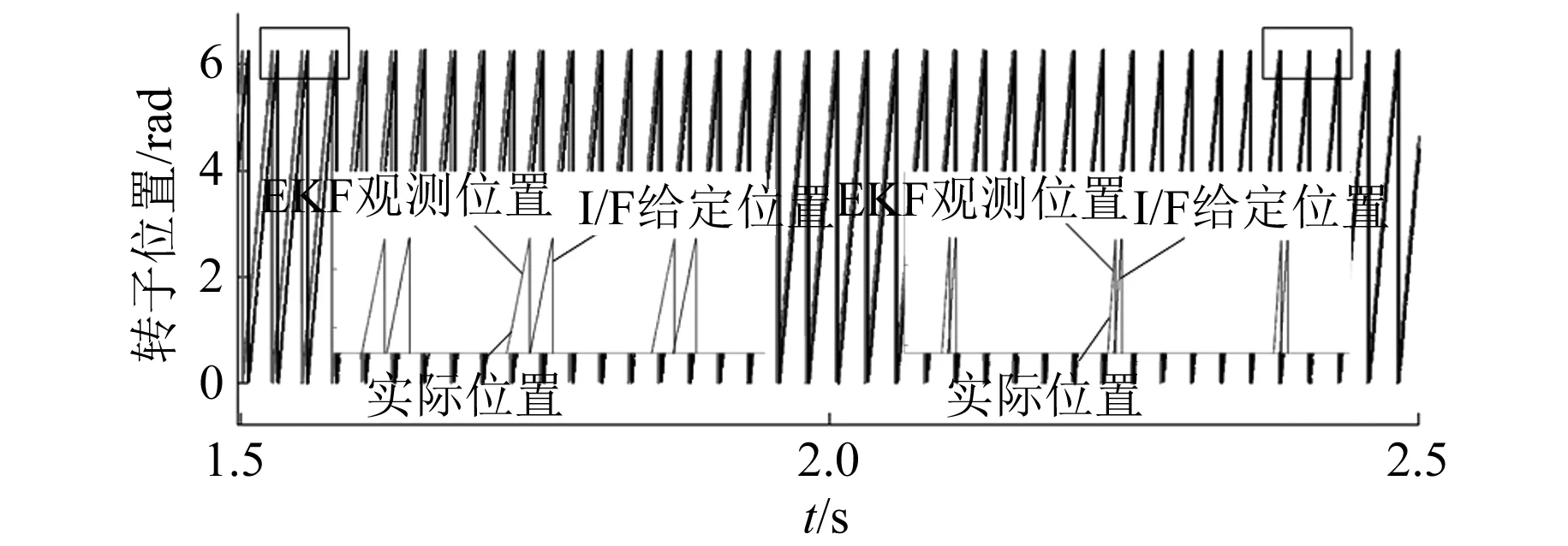
图10 切换状态中I/F给定位置、EKF观测位置和实际位置
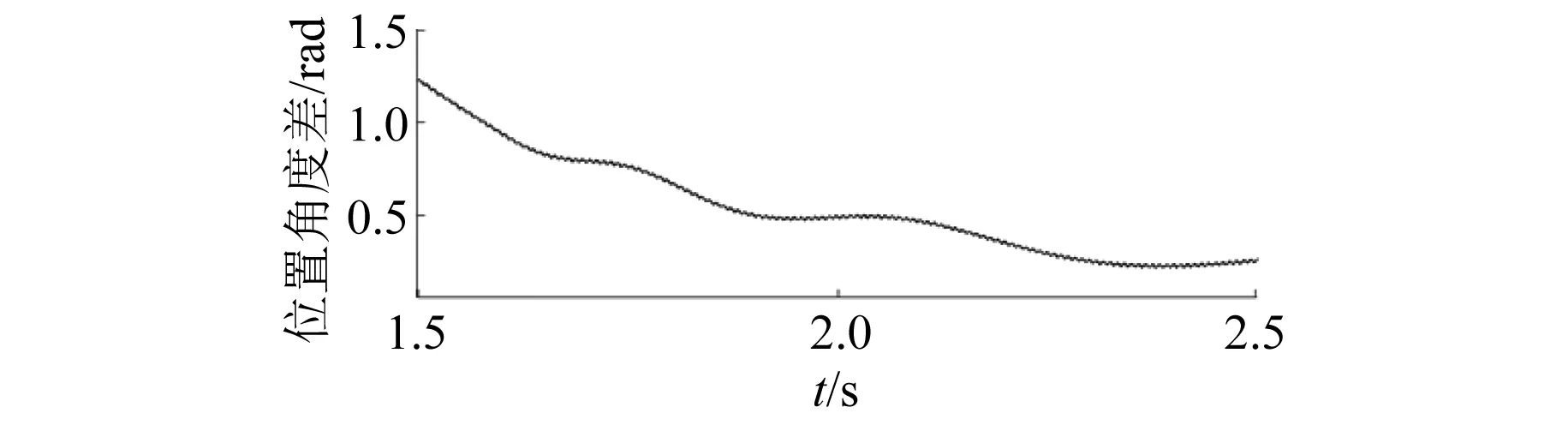
图11 切换状态中位置角度差θerr
图12是空载条件下按不同的比例k取值均匀减小电流的常规切换方法和本文改进切换方法的对比。当k取100时电流下降较快,当k取10时电流下降较慢,常规方法给定的切换电流大小减小为5 A。图13是电机带负载Tl=2 N·m起动时常规切换和本文改进方法的起动对比图,从图12、图13中可以看出,常规方法在切换前后电流变化较大,导致转速产生波动,而改进的切换方法在切换前后电流基本相等,转速波动小。
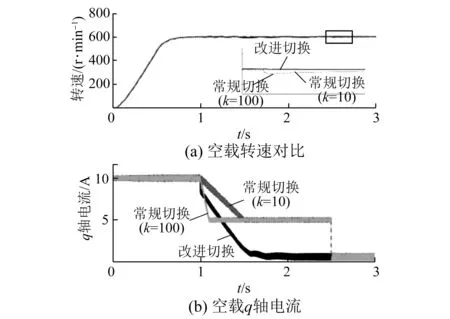
图12 空载起动至切换过程常规和改进方法电流转速对比图
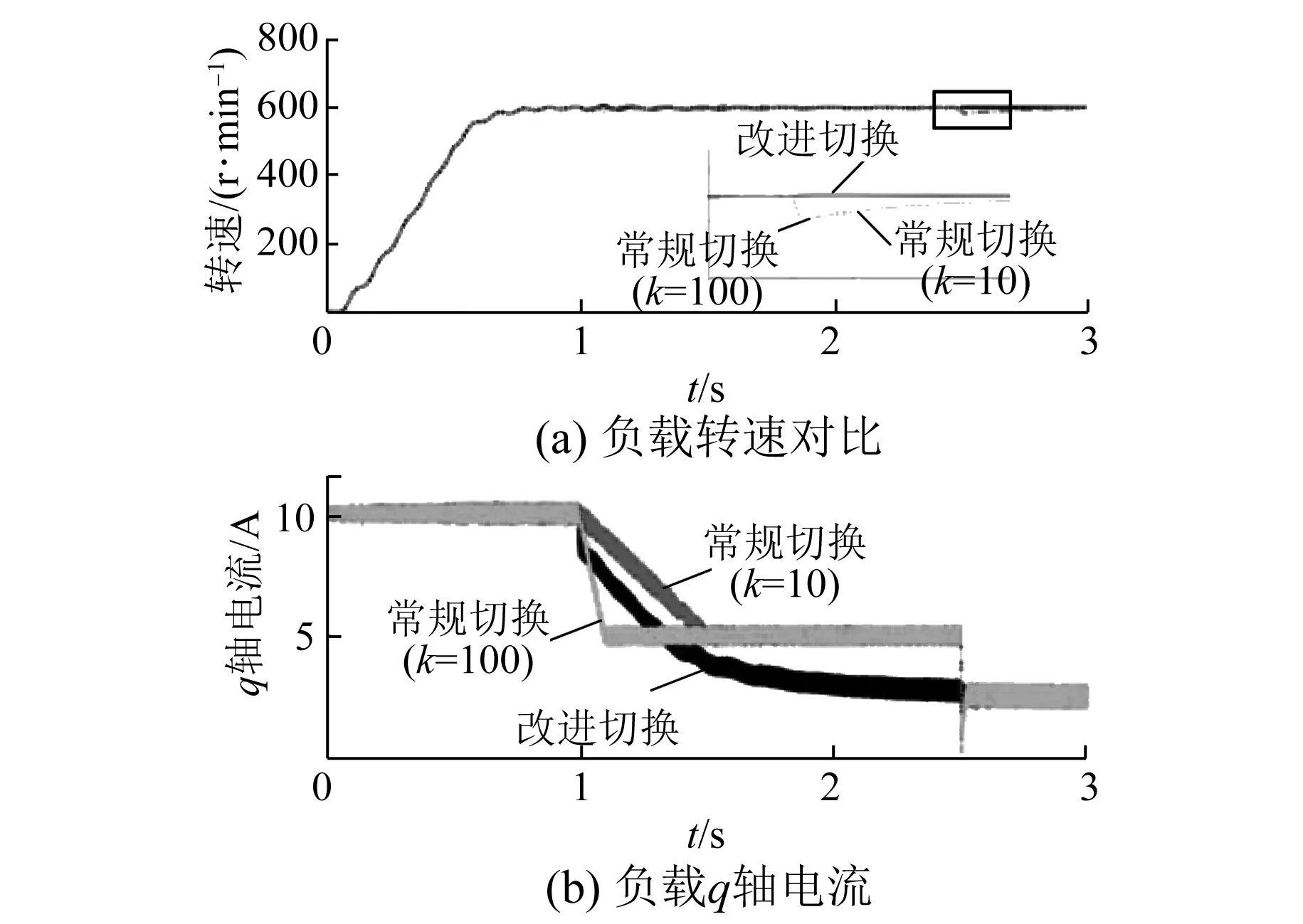
图13 负载起动至切换过程常规和改进方法电流转速对比图
图14为负载Tl=6 N·m时,常规方法中给定电流减小为5 A时的起动速度曲线,可以看出在给定较大负载情况下,由于给定电流过小,此时常规方法电机起动失败,而改进方法则可以正常运行。
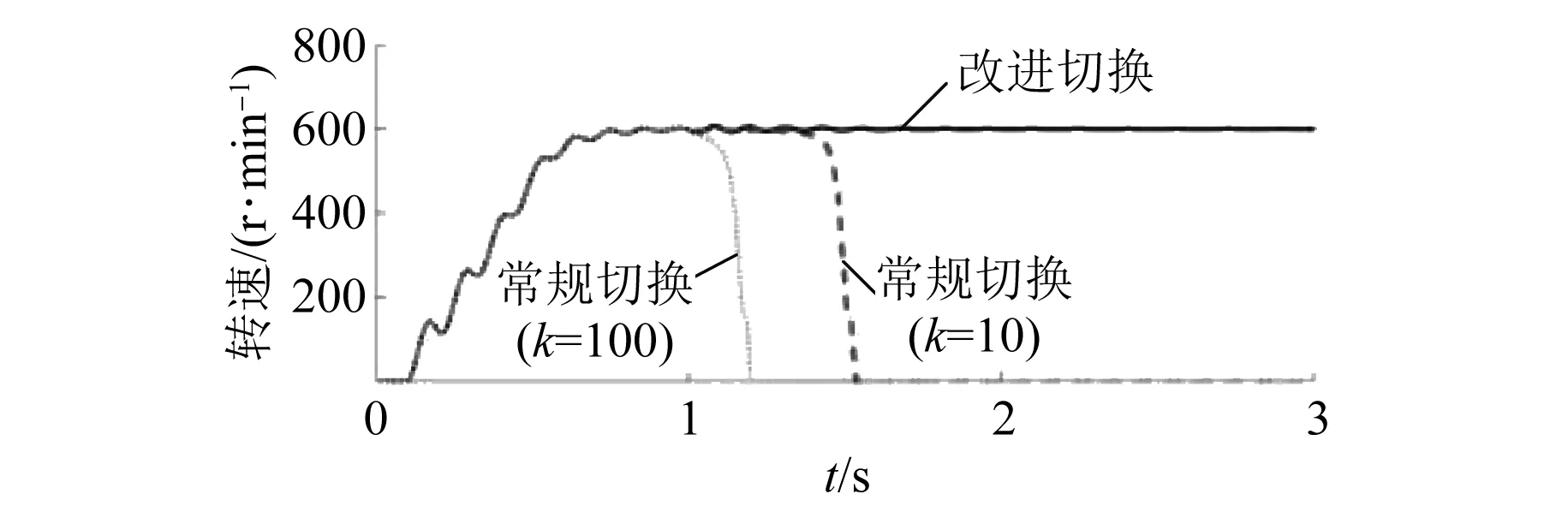
图14 较大负载下起动转速对比图
从以上分析可以看出,本文提出的方法在切换前q轴电流减小到一定值后,同切换后EKF无传感器闭环控制的q轴电流大小基本一致,切换后转速保持稳定,整个切换过程对于不同的负载具有较强的自适应性和鲁棒性,与常规切换方法相比,切换过程更稳定。
5 结 语
本文针对PMSM全速域范围无速度传感器运行问题,在零速和低速阶段采用I/F起动,中高速切换为EKF闭环控制,并设计了一种合理的过渡方式来切换电流和位置。仿真结果表明,该方法可以实现PMSM全速范围下的稳定运行,在低速时以电流闭环的方式起动,满足各种负载的要求,中高速状态下EKF能准确估计电机的位置,所设计的切换方法保证了过渡过程的可靠性和平稳性。