超构表面在三维成像与显示技术中的应用
2022-08-31池汉彬段辉高胡跃强
池汉彬,段辉高,3,胡跃强,2*
(1.湖南大学 机械与运载工程学院 国家高效磨削工程技术中心,湖南 长沙 410082;2.湖南大学 深圳研究院 微纳光学器件先进制造实验室,广东 深圳 518000;3.湖南大学 粤港澳大湾区创新研究院,广东 广州 511300)
1 引 言
成像与显示是将研究对象的光场信息通过图像形式进行记录,再通过显示设备再现图像信息的过程。目前,成像与显示技术通常只涉及二维光强信息和色彩信息,缺失了场景深度、目标几何形态和空间遮挡关系等关键的三维信息,使得人们只能通过二维窗口去观察三维世界。随着人类社会和信息技术的发展,传统二维成像与显示技术已经无法满足机器和人眼的需求,对于机器而言,获取更多维度的信息能够保证信息输入的完备性,充分发挥计算机的决策能力;对于人眼而言,人们希望能够直接观看到真实的立体场景,获得沉浸式观看体验。近年来,随着高清晰度高速传感器的出现以及计算机运算能力的提升,三维成像与显示技术得到了深入的研究,并逐渐应用到自动驾驶、机器视觉、智能制造、人脸识别与检测、增强现实(Augmented Reality,AR)及虚拟现实(Virtual Reality,VR)等多个领域中[1-2]。
三维成像技术能够获取并保存物体的空间三维信息和三维特性,根据有无光源可分为主动式和被动式。主动式三维成像通过主动照明获取空间物体的三维信息,需要光源投射和接收装置作为辅助,这增加了系统的复杂度和功耗。目前广泛应用的主动式三维成像技术是点云投射、光束扫描和三维断层扫描。其中,点云投射[3]适合近距离物体的三维探测,处理的数据量小,主要应用于手机等终端设备的人脸识别与检测;光束扫描基于飞行时间法[4]可以实现远距离三维测距,主要应用于智能驾驶的无人车;3D断层扫描[5]检测距离较短,但实时性强,主要应用于显微系统中的动态样品立体成像或表面轮廓检测。被动式三维成像技术通过透镜成像获取包含三维信息编码的图像,系统的复杂度和功耗较低,可以分为透镜阵列型和单透镜型。透镜阵列型三维成像是一种多目视觉方法[6],其典型代表是光场成像[7],通过透镜阵列将光线分散调制到图像传感器的不同位置,然后基于获取的传感器数据拼接成不同视角的图像阵列,使用算法可以从这些图像中估计出深度信息。传统光场成像受到微透镜性能缺陷和本身原理的局限,难以实现高空间分辨率成像[8-9]。单透镜型三维成像是一种基于计算重建深度的单目视觉方法[10],利用聚焦、离焦或者移动视差获取深度感知[11]。基于标准点扩散函数(Point Spread Function,PSF)的离焦成像法[12],通过获取不同离焦程度下的焦深图像序列,但是不同焦深图像的PSF类似,导致测量精度有限。三维点扩散函数(3D-PSF)随着物体深度的不同而产生相应的响应,因此可建立3D-PSF与物体深度的对应关系[13]。3D-PSF相比标准PSF可实现精度和可靠性更高的离焦深度成像,但是基于传统衍射元件的3D-PSF目前存在效率低、体积庞大且难以集成的缺陷。
三维显示技术能呈现出立体逼真的画面,图像不再局限于平面,让观众有身临其境的感观。根据是否需要佩戴辅助设备,三维显示技术可分为裸 眼三维显示[14]和助视式 三 维显示[15-16]两 大类。全息三维显示[17-18]和光场三维显示[19]归类于裸眼三维显示,无需佩戴设备即可观看到具有深度信息的三维影像,极大提升了观看的自由度和舒适度。全息三维显示是未来深度沉浸式裸眼三维显示的理想方法[20]。它包括记录和再现两个过程,记录过程指用光的干涉原理将物光波的振幅和相位信息以干涉条纹的形式记录在感光介质上;再现过程指利用光的衍射原理将特定光线照射在记录介质上,重建出物光波的振幅和相位信息实现逼真的三维显示。光场显示作为光场成像的逆过程,使用微透镜阵列或柱透镜阵列等光场调制器件将编码的光场信息投射到空间中的不同方向,形成由非相干光产生的具有连续视差的真实光场三维场景。光场显示相比于全息三维显示所需数据量较小,被认为是目前最具前景的裸眼三维显示技术之一。AR和VR是学术界和工业界的新兴领域。虚拟图像以沉浸式和交互方式呈现,从而为各种应用程序提供新的用户体验。AR和VR领域的主要平台设备是近眼显示器[15-16],作为下一代交互式显示器,呈现充满用户整个视野的虚拟数字图像(VR),或者与真实场景的透视图相结合(AR),能够提供生动的三维视觉体验。
三维成像与显示设备关注多方面的性能要求,包括宽视场、大数值孔径、高分辨率、连续视差和小型化等方面,然而现有的三维成像与显示设备受到传统光学元件性能缺陷的限制,难以同时满足这些需求。例如,传统折射光学元件通过累计的厚度量来改变单一光学参量,造成功能单一、体积庞大和难集成的缺陷。随着光电子科学技术以及光子集成器件的飞速发展,发展高效率、集成化和紧凑型三维成像与显示系统成为研究的热点[21]。近年来,一种由亚波长尺度的单元结构排布组成的超构表面[22-25]为开发轻薄光学多功能器件提供了变革性的解决方案。超构表面利用亚波长尺度下光与物质的相互作用,通过合理排布并调整纳米单元的形状、大小、位置和取向,对局部电磁场的偏振[26-27]、振幅[28-29]、相位[30-31]和频率[32]等传播特性进行任意操纵,为人工调控电磁波提供了丰富的自由度。研究者开发出了各种功能新颖的超构表面,并成功应用于全息显示[33-35]、超构透镜[36-39]、光束整形[40-44]以及非线性光学[45-47]等领域。超构表面具有多功能、轻薄化、平面化和易集成等优势,有望突破传统三维成像与显示设备的瓶颈,为新型紧凑型三维成像与显示设备提供新方案,因此具有广阔的应用前景。
本文主要综述了超构表面在三维成像与显示技术中的应用进展,对主动式和被动式三维成像进行讨论,其中主动式成像包括点云投射、光束扫描和3D断层扫描,被动式三维成像包括透镜阵列型和单透镜型。然后,介绍了全息显示、光场显示和近眼显示3种三维显示技术。最后,对超构表面在三维成像与显示技术中面临的挑战和未来发展方向进行了展望。
2 超构表面在三维成像领域的应用
传统的三维成像设备由于光源辅助和透镜级联等问题,需要较大体积的设备作为支撑,因此研究体积小、轻量化和易集成的紧凑型三维成像设备成为目前学术界和工业界的研究热点。超构表面具有对光束的灵活调控能力以及超轻超薄易集成的特性,能为实现新型三维成像设备提供一条新的途径。本文回顾了超构表面在主动式和被动式三维成像领域中的应用进展。
2.1 主动式三维成像
主动式三维成像需要配备光源,通过对光源进行发射和调制来获取空间物体的三维信息,该系统较为复杂,包括激光器、投射器和接收器等设备。根据成像原理和对光源调制方式的不同,主动式三维成像技术可以分为点云投射、光束扫描和3D断层扫描。
2.1.1 点云投射
点云投射是结构光照明[3]中的关键技术,使用投射器将准直激光束按照一定的规则和模式进行编码重新分配后发射到物体空间中,产生具有均匀强度的点云阵列,然后采集反射回来的随着物体距离和表面三维形貌的不同而发生形变的图案,再计算图案中每个像素的形变量,获得物体的深度信息实现三维成像。点云投射的性能指标主要包括视场、衍射效率和光斑均匀性。传统点云投射使用衍射光学元件(Diffractive Optical Elements,DOEs)[48]来实现,通过不同高度的台阶实现0~π的相位调制,在加工时使用复杂的套刻工艺,对加工提出了较大挑战。传统DOEs的大光栅周期使得在大视场角时受到非期望衍射阶次杂散光的影响,光束衍射效率下降和强度均匀性差,因此DOEs的视场范围有限。超构表面通过亚波长结构单元阵列的谐振或波导响应实现0~2π相位的任意调控,具有更大的设计自由度、亚波长空间分辨率和多参量调控的优势,可以实现大视角、高衍射效率、强度均匀以及选择性衍射等点云投射功能。超构表面采用标准半导体制备工艺,只需一次刻蚀即可完成加工,具有超轻薄和易集成的优势,能与激光器等其他光学元件集成,促进了微型轻薄化三维成像技术的发展。
针对传统DOEs用于大视场点云投射时存在衍射效率低和光束强度均匀性差的问题,Ni等[49]开发了一种偏振无关的硅基超构表面衍射光学元件,实现了具有120°×120°视场角,强度均匀且高效率的2D结构光点云阵列投射,如图1(a)所示。作者使用矢量电磁仿真对超构表面的结构参数进行优化,纳米单元采用4倍旋转对称性的超晶胞设计消除了偏振依赖性,可在1 550 nm的电信波长下工作,衍射效率高达81%。为解决传统DOEs只能实现2π半空间点云投射的限制,Li等[50]提出了一种基于非晶硅的Hermitian共轭加扰超构表面,在不考虑入射光偏振状态的情况下同时实现透射和反射模式,生成了具有压缩信息密度的4π全空间随机点云,如图1(b)所示。由加扰超构表面生成的单个衍射光束衍射角度接近90°,视场角(Field of View,FOV)接近180°,因此可以在透射和反射下实现4-全空间的随机点云生成,并且具有高信息容量(4 404个随机点云),能够辅助结构光3D成像。在生成制备加扰超构表面时使用非晶硅材料和光刻等成熟的半导体制造工艺,有利于商用大批量生产。超构表面也可将光分裂和衍射成具有所需轮廓的多个光束,实现点云的选择性投射。Song等[51]利用基于几何相位的介质超构表面对入射圆偏振光的复振幅进行调制,实现了光束衍射级次选择性出射。该超构表面展示了选定的衍射级出射形成带有单词“META”的图案,而其他衍射级则被抑制,如图1(c)所示。实验表征了其衍射级的分布均匀性和角度,具有极高的传输效率,并且易于集成到复杂系统,可以用于各种光学检测中。在点云投射中,对光束进行大面积像素化控制能良好地辅助三维成像,但是在制造上存在挑战和困难。随着光刻技术的发展,超构表面大面积图案化成为可能。Li等[52]运用浸没式光刻技术在12英寸玻璃晶圆上制备了尺寸为2 500μm×2 500μm的大面积像素化超构表面光束偏转器。如图1(d)所示,21×21的光束偏转器阵列可同时生成441个随机点,或者通过切换光束偏转器的像素点来进行逐像素光束转向,即每个像素设计特定的弯曲角和定向角,以控制传输光束的传播方向。
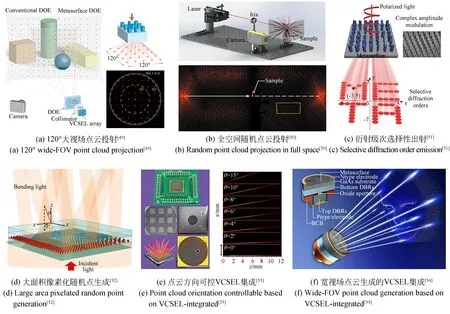
图1 超构表面实现点云投射Fig.1 Point cloud projection by metasurfaces
超构表面与光源进行片上集成是使主动式三维成像设备进一步轻量化和小型化的有力解决方案。比较常见的激光器是垂直腔面发射激光 器(Vertical Cavity Surface-Emitting Laser,VCSEL),其结构由布拉格反射层和多量子阱增益介质组成,它发射垂直于晶圆表面的相干激光束。相比发光二极管(LED)和边发射激光器(EEL)等其他激光器,VCSEL具有阈值电流小、低功耗、晶圆级测试、圆形输出光束轮廓、发射角小、调制速度快,以及能够进行大规模2D阵列制造的优势,因此成为集成光子应用的首选。VCSEL可以发射更高光束质量的激光束,有利于实现高衍射效率的大视场点云投射。单模VCSEL发射的散度通常超过10°,需要额外的光学元件进行光束整形。大多数用于结构光点云投射的超构表面都只是充当光路系统中一个光束整形的器件,仍然存在小型化的空间。因此,将光源和光束整形器件集成到单一的复合系统中,能够显著减小三维成像设备的体积,实现芯片级三维成像设备。Xie等[53]提出了一种VCSEL集成超构表面(MS-VCSEL)阵列,能实现可编程的激光发射和完全任意的光束轮廓控制,如图1(e)所示。他们将VCSEL光源与满足准直相位轮廓的光输出耦合介质超构表面进行集成,在发射表面对VCSEL激光束进行整形,不用改变激光腔,散度降低到0.83°,解决了激光系统的衍射问题。因为超构表面结构是整体集成在VCSEL上,所以互连光损失最小,传输效率高达80%。对MSVCSEL阵列中每个像素的特定电极偏置进行编程,该片上设备可以将光线发射到所需的方向,且不影响整体激光的特性,但点云投射的视场有限。Wang等[54]实现了更大视场范围结构光点云投射的超构表面片上VCSEL集成设备,该设备具有多通道光束阵列生成、高达60°的片上大角度光束转向以及宽视场(约124°)的晶圆级全息光束整形,如图1(f)所示。
2.1.2 光束扫描
在光检测和激光测距(Light Detection and Ranging,LIDAR)[55]三维成像技术中,为了保证较长的探测距离和较高的精度,需要使用额外的器件进行光束扫描。传统LIDAR扫描方式使用可移动的反射镜通过扫描方位角和俯仰角来覆盖整个空间,需要使用机械转动装置,难以实现小型化,且容易受到外部冲击和振动的影响。光学相控阵(Optical Phase Array,OPA)扫描方式存在激光功率插入损耗,对光学系统的功耗要求较高,需要解决系统热管理的关键问题。超构表面具有强大的光场调控能力,因此人们将超构表面应用于光束扫描中。超构表面光束扫描方案主要是基于可调谐有源超构表面,将超构表面与透明导电氧化物(TCO)材料、多量子阱(MQW)、微机电系统(MEMS)、液晶和相变材料等活性介质结合,可对超构表面的相位进行动态调控,实现光束的动态扫描。可调谐超构表面有望替代激光雷达的点扫描或线扫描光学元件,解决现有光束扫描元件的瓶颈问题。
2.1.2.1 TCO材料超构表面
TCO材料通过控制电压来调节有源层中的电荷浓度,进而改变有效折射率,实现对光束的动态导向能力,具有高速调制和低电压偏置的优点。铟锡氧化物(ITO)是最常用的TCO材料之一,它在近零区域(ENZ)时的介电常数εITO在-1~1之间,使得在近红外波长时电磁积聚层附近的电场限制增大,具有良好的电可调性能。Huang等[56]提出并验证了一种栅极可调的超构表面,可以对超构表面反射的平面波的相位和幅度进行动态电气控制。如图2(a)所示,该动态可调超构表面由Au天线、Al2O3间隔层和ITO衬底组成,其中Au天线用作栅极,ITO作为场效应通道。在天线栅极和底层接地平面之间施加电偏置时,Al2O3/ITO界面上的载流子浓度通过形成电荷积累层或消耗层而增加或减少,实现ITO的复介电常数的调制,使得入射光与天线的相互作用发生变化,进而控制反射光的方向。实验表明,施加2.5 V的栅极偏置电压,可在10 MHz的调制速率下产生180°的相移和30%的反射率变化。为了证明±1衍射级的偏转角度,模拟了在施加3.0 V偏置电压下不同光栅周期的远场强度,通过选通4,3,2个天线的子组,实现了-40°~40°的大范围扫描,视场达到80°,如图2(a)所示。采用结构参数优化的不同天线材料或采用双门控方法,可进一步增大相位调谐范围。Shimanesh等[57]提出了双门控场效应可调谐超构表面天线阵列。如图2(b)所示,该双门控超构表面结构由铝背反射器、栅极电介质/ITO/栅极电介质异质结构和具有“鱼骨”图案的周期性铝纳米天线阵列组成。在每个有源超构表面天线的电介质间隔内具有两个电荷积累/耗尽层,它们提供了双门控:一个位于顶部天线与ITO层之间,另一个位于背板反射器与ITO之间,因此每个超构表面元件允许施加两个串联的独立电压控制MOS场效应通道。顶部和底部的ITO/栅极-电介质界面在施加的外部偏置电压下表现出电荷积累或耗尽,这种载流子密度的调制促使ITO层的复折射率大范围地变化,从而实现更广泛的相位可调性。在1 550 nm波长下,施加6.5 V偏置电压,实现了0~303°的连续相移和89%的相对反射率调制,具有良好的光束控制能力。
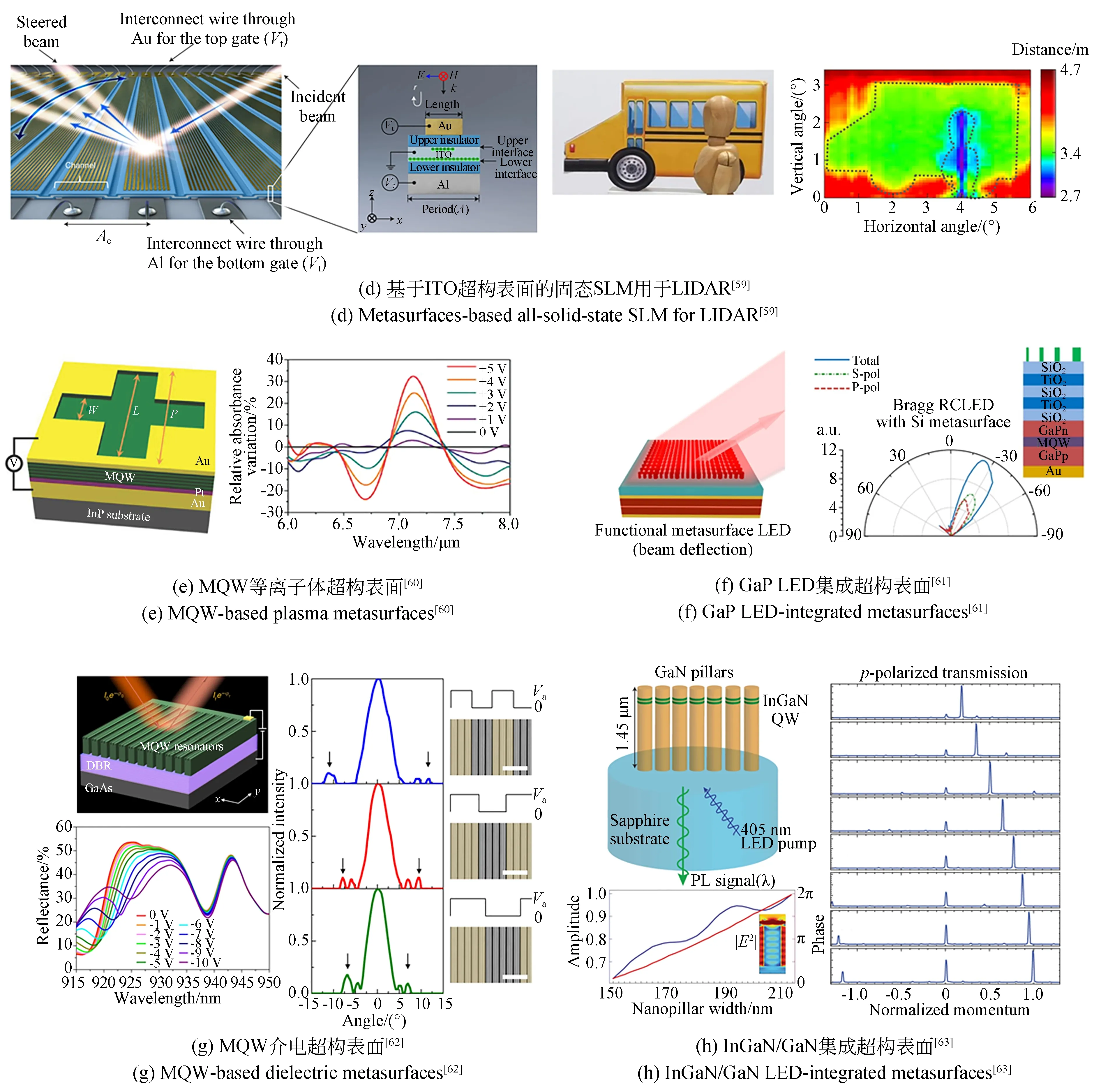
图2 基于TCO材料或MQW架构的超构表面实现光束扫描Fig.2 Metasurfaces based on TCO materials or MQW architecture for beam scanning
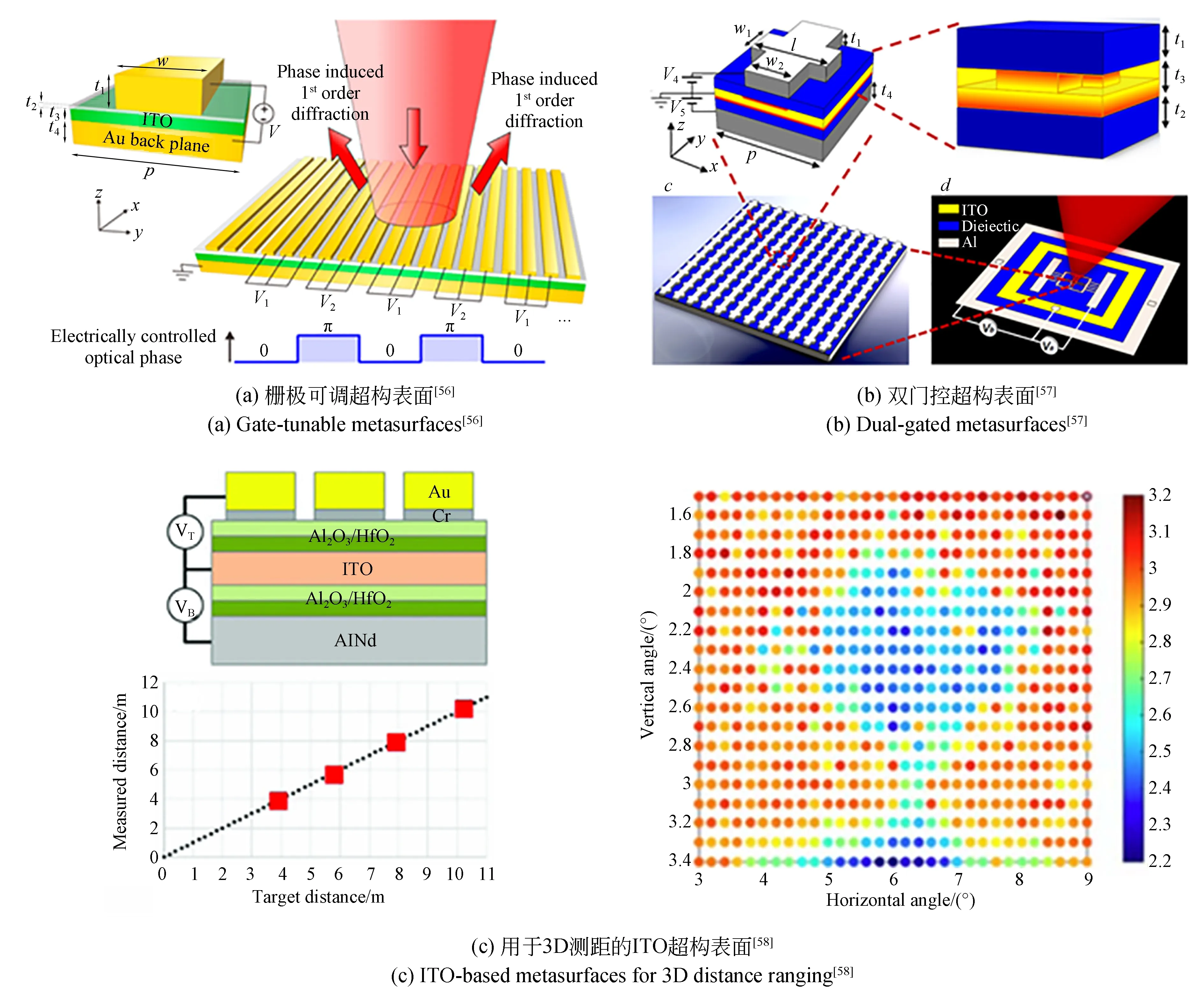
Sun等[58]首次成功使用基于TCO的电可调有源超构表面进行了3D深度扫描。如图2(c)所示,该超构表面由有源氧化铟锡(ITO)层的等离子体谐振器阵列组成,使用两个单独的偏置控制0~360°的幅度和相位调制,通过适当的偏置组合可在恒定反射率下实现0~360°的相位调制或者在恒定相位下实现16%的反射率变化。实验中,使用四级锯齿相位光栅进行动态光束控制,在允许范围内以任意角度控制光束,边模抑制比达到2.7 d B。如图2(c)所示,结合飞行时间原理,成功演示了3D距离测距,能够以<4 cm的精度测量长达10 m的距离,扫描角度、角度步长和分辨率分别为6°×4°,0.2°×0.2°和31×21=651。如图2(c)所示,3D测距中测量与实际距离之间的误差低于0.3 m,并且由于超构表面阵列的高分辨率,图像边缘可以很好被检测出来。2021年,三星在该文章的基础上开发了一款全固态扫描仪[59],使用相同结构配置的电可调等离子体超构表面阵列组成的空间光调制器(Spatial Light Modulator,SLM)实现光束扫描功能,如图2(d)所示。在顶层和底层施加两种不同的电压偏置,可以独立调整反射系数的实部和虚部,实现360°的幅度和相位控制,提供完整的波前调制。虽然该器件的扫描角度仅为8°,衍射效率仅为1%,但是具有5.4 MHz的切换速度和283 fJ/μm-2的能耗。图2(d)为1.56μm工作波长下激光雷达系统3D深度探测的效果,模拟街景由模型车和人组成,人物、模型车和屏幕的距离分别为2.4,3.4和4.7 m,获得了扫描区域深度图,所有目标的测量值和实际距离相一致,通过提高设备效率和边模抑制比以及优化发射器和接收器的光学配置,可以进一步提高检测范围和精度。
2.1.2.2 MQW半导体超构表面
量子阱(Quantum Well,MQW)是一种产生量子尺寸效应的异质结半导体激光器架构。MQW体系结构可在可见光和近红外波段依靠电光调制实现快速光折射率调制,能实现高达k MHz的调制速度,广泛应用于高端光电子器件中。随着超构表面的发展,基于MQW半导体架构的超构表面被提出。早在2014年Lee等[60]将MQW架构与等离子体超构表面结合,实现了具有纳秒级响应时间和中红外宽调谐范围的电可调器件。如图2(e)所示,220 nm厚的MQW半导体层夹在接地平面和等离子体纳米谐振器图案化的金属层之间,在672 nm和712 nm波长附近实现了强表面吸收(或反射率)的调制,将偏置电压从0 V更改为+5 V,在712 nm波长处出现超过30%的吸光度变化,因此可用于光束控制。Wu等[61]开发了一种在可见光或近红外波段工作的基于电光可调谐III-V多量子阱的全电介质有源超构表面平台。如图2(g)所示,超构表面的外延III-V异质结构由GaAs衬底、分布式布拉格反射器(DBR)和1.23μm的未掺杂MQW层组成,简称MQW/DBR/GaAs。MQW可在915~920 nm波长的近带隙区域中调制0.01~0.05的折射率实部,并且通过将超构表面与Mie共振和导模共振的混合,部分蚀刻的双缝MQW光栅结构使得在916 nm和963 nm附近的反射率下降。在7 V偏置电压下增强了917 nm波长附近的电光调制,从而产生约270%的反射率变化和70°的相移。MQW折射率实部的电光调制会引起反射光的红移,通过实验验证了动态光束转向的功能,施加3 V的偏置可以产生大约10°的扫描角(20°FOV),并且可对MQW超构表面阵列上的每个单元元件进行单独电控。
MQW半导体超构表面架构最显著的优点是可以直接在III-V组晶圆上单片生长,并与LED、边缘发射器和VCSEL等光源同时集成,使设备整体更加小型化。比较典型的激光光源是LED,它发出非相干的朗伯形状光,具有低成本、低功耗和长寿命等优点,但是需要额外的光学系统来精确控制发射光的波前。大多数超构表面只能在大空间相干性的激光照射下才能正常工作,而LED的大角度朗伯散射模式和空间低相干性,使得超构表面器件难以在LED上集成。Khaidarov等[62]通过将GaP LED架构与超构表面集成来控制发射光栅的特性,GaP LED结构由多个量子阱(MQW)组成,发射波长约为620 nm,如图2(f)所示。这种设计极大地减少了LED发射角度,可根据超构表面的相位分布来引导和塑造发射光束。如图2(f)所示,该集成超构表面可以实现约30°的光束偏转,但从发射效率和泵涌功率之比可得效率较低(3%)。针对LED光发射效率低的问题,Iyer[63]等提出了InGaN/GaN量子阱结构的超构表面,可在任意角度产生窄的单向传输和发射波瓣。如图2(h)所示,所制备的超构表面由嵌入在衬底上的GaN柱和100 nm GaN覆盖层的InGaN/GaN MQW发光相柱组成。该量子阱通过405 nm的LED光泵浦激发,当发射光通过GaN柱向基板时产生相位延迟。氮化镓柱被设计成具有平面内的相位梯度,从而诱导动量改变了某些通道中远场辐射光的局部密度。这种对耦合通道的选择性修改会导致非对称和单向发射,并增强光致发光对所选通道的影响。通过实验测量,总量子效率和空气耦合外部量子效率分别提高了7倍和100倍。
2.1.2.3 MEMS集成的超构表面
超构表面与MEMS集成实现光束扫描与传统激光雷达的扫描方法类似,超构表面作为反射调制器件,通过MEMS驱动超构表面的基板移动或者MEMS驱动超构表面产生形变来实现光束扫描功能。基于第一种机制,Arbabi等[64]提出了一种MEMS集成的可调谐超构透镜,通过驱动超构表面基板进行小移动,来实现光焦度的大范围调谐,即焦距的调节,如图3(a)所示。实验表明,915 nm聚焦二极管激光器的焦点位置可以偏移约60μm,调制速度为2~4 kHz。该设备的阵列可以在同一芯片上制造,实现多个不同焦距的镜头扫描不同深度。但是,这种方法需要较高的偏置电压(高达80 V),仅能实现μm级别的移动。基于第二种机制,即通过驱动超构表面形变实现光束扫描,Holsteen等[65]设计了一种悬浮硅(Si)超构表面,通过添加一个电压控制的驱动元件,实现了时间颜色控制、动态光束控制和可见光范围的光聚焦等多项功能,调制速度为1 MHz,偏置电压为2~3 V。该超构表面器件使用高指数Si纳米结构,具有强大的Mie光学共振,可提供对光散射的有效局部控制。使用绝缘体上硅(SOI)技术将不同的基于Mie谐振器的超构表面悬浮在硅衬底上方,对各种光学功能进行机械调谐。Mie共振可以通过MEMS控制,调制发生在衬底和Si超构表面之间的法布里-珀罗共振模式,进而改变超构表面阵列尺寸来实现光束控制。如图3(b)所示,悬浮Si超构表面在600 nm波长处覆盖了12°的扫描角度(视场角24°),其偏置电压为1.2 V。
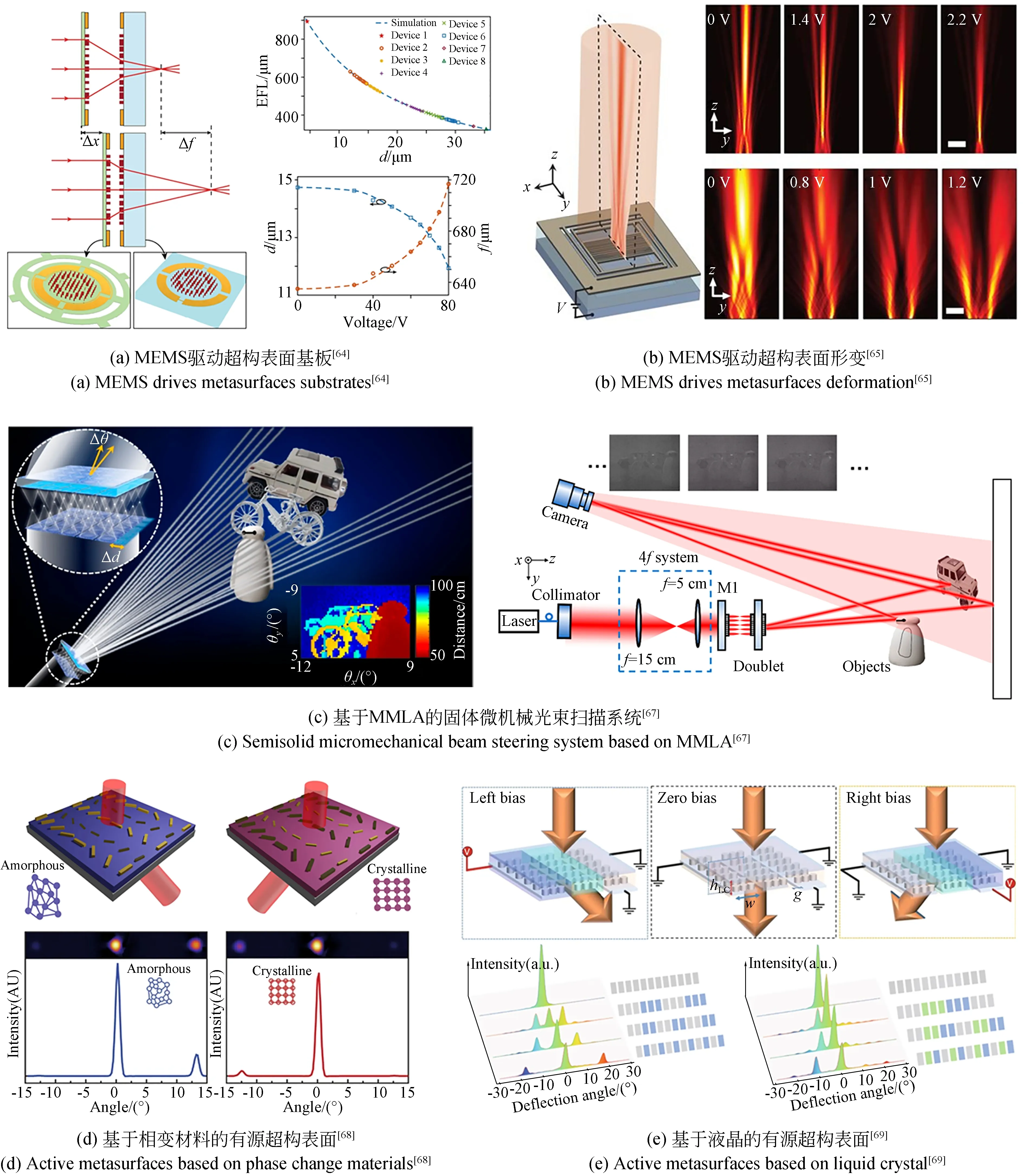
图3 基于MEMS集成、相变材料或液晶的超构表面实现光束扫描Fig.3 Metasurfaces based on MEMS integration,phase change materials or liquid crystal for beam scanning
研究人员开发了众多的方案来实现特定场景下的光束控制和扫描。偏心微透镜阵列(DMLA)[66]是一种MEMS光束扫描方案,它作为机械和全固态方法的过渡技术,继承了固态方法的紧凑性和快速特性以及笨重的机械方法的高分辨率和功率容差,但是受限于传统微透镜的性能。超构表面的亚波长调制性能可以高效地实现极小F数的透镜,打破传统透镜光学元件的瓶颈,同时超构表面超轻超薄的特性减小了MEMS驱动所负载的惯性,将超构表面透镜替代传统微透镜作为光束扫描方案中可以实现高效率、高精度、大视场和高速的光束扫描。最近,Chen等[67]将一组共焦的单层超构表面微透镜阵列和双层超构表面微透镜阵列组合,开发了基于超构表面透镜阵列的半固体微机械光束扫描系统(Micromechanical beam steering system based on Micrometa-Lens Arrays,MMLA)。入射光束通过第一组微透镜阵列聚焦后由双层超构表面微透镜阵列准直出射,通过控制两组微透镜阵列之间的微位移可以实现出射光束的大角度控制,如图3(c)所示。MMLA具有极小的F数,在微小位移下对出射角度具有极大的控制能力,在较大视场下拥有良好的像差校正能力和出光口径比例,以及接近衍射极限的角度分辨能力,有利于远距离和深空探测的应用。实验在70μm的最大离轴位移量下得到30°×30°的视场角和0.14°的角分辨率,器件体积小于0.5 mm3。将MMLA应用在激光雷达中进行模拟街景的三维深度扫描,可以清楚地识别物体的轮廓和结构,验证了该系统的3D深度扫描能力。
2.1.2.4 相变材料或液晶超构表面
相变材料也是一种制备有源可调谐超构表面的材料,它在外部热、光和电的刺激下,在非晶态和晶态之间快速和重复切换,具有红外区高折射率对比度和非挥发性特性。Yin等[68]提出了一种相变材料高度集成的等离子体有源超构表面,实现了不依赖于机械变形的光束转向和变焦。如图3(d)所示,该超构表面由50 nm厚的相变材料有源层(Ge3Sb2Te6)、15 nm厚的防氧化层(ZnS:SiO2)和40 nm厚的Au天线超构表面组成。有源层在沉积时处于非晶态,在加热到160°时切换到结晶态。配置两组不同类型的等离子纳米天线A和B,它们具有不同的等离子共振。在非晶态下,一组在3.1μm处共振,而另一组在2.28μm处共振;在结晶状态下,共振分别移动到4.1μm和3.1μm。因此,每个天线都与非晶态和晶态相互作用,从而改变衍射光束的衍射角,实现了光束扫描功能。
SLM在激光雷达三维成像中具有广泛的应用,能够在不改变强度的情况下重新配置每个像素透射或反射光的相位延迟,一般使用液晶(Liquid Crystal,LC)来实现。LC分子在外加电压下能够沿给定方向动态控制折射率。基于LC的SLM的大像素尺寸提高了投影图像的分辨率和FOV。在保持LC层所需厚度的同时进一步缩小像素尺寸存在相互串扰的问题,严重限制了其潜在的应用。Li等[69]将TiO2超构表面与LC集成,实现了亚波长像素尺寸的小型化SLM。通过修改超构表面纳米天线周围的液晶方向来改变局部共振,以亚波长像素调制透射光波前。如图3(e)所示,在液晶夹层中集成205 nm高度的超构表面结构,可在660~670 nm波长内,根据液晶分子取向(0°,45°和90°)实现三级相位延迟。超构表面由3个纳米盘单元排列组成,提高了衍射效率,模拟预测在665 nm处的一级衍射效率为48%。如图3(e)所示,该三能级SLM,通过施加0,3.5和8 V的偏置电压实现一阶偏转,角度约为11°(FOV为22°)。与传统的SLM相比,该超构表面集成的SLM的像素尺寸减小三分之一,液晶厚度减小一半以上。
不同调控方式实现的动态可调谐超构表面光束扫描方案,具有不同的优势和特性。TCO适用于近红外和中红外波段,调制速度可达几十MHz,具有高载流子密度,可以在大调谐范围显著地改变折射率。MQW适用于可见光和近红外光波段,具有更高的调制速度(kMHz),可直接在晶圆上生长,并与LED、边缘发生器和VCSEL等激光光源集成,实现设备的小型化。相变材料,例如GST通过改变温度可以在非晶相和结晶相之间快速切换(ns级),在红外波段具有高折射率对比度和非挥发特性,但是其加工制备难度大。液晶的分子取向受外部电场控制,施加电压可以在太赫兹到可见光的宽波段内工作,但是调制速度只有kHz,切换时间为ms级。MEMS系统通过形变实现连续的光束扫描,信息采集更加完整,但是视场角有限,且其机械结构存在一定的惯性。因此,要根据不同的光束扫描场景选择适用的有源超构表面方案,能够更好地辅助主动式三维成像技术。
2.1.3 3D断层扫描
3D断层扫描是一种三维显微技术,使用扫描仪对样本多个横截面进行拍摄,然后重建出3D图像。传统3D断层扫描需要用到复杂的机械转向部件,增加了显微系统的复杂度。超构表面可以帮助显微镜在没有复杂机械部件的情况下实现3D断层扫描解析活细胞。Li等[70]通过几何相位设计了大色散的超构透镜来简化断层扫描技术。超构透镜由GaN纳米柱按同心环图案化阵列排布组成,其特性与波长相关,在可见光下聚焦在目标的不同区域,可实现非运动方式的3D断层扫描,如图4(a)所示。该高数值孔径超构透镜在可见光波段可以获得高成像分辨率,并且大色散的设计使它在一定成像距离时具有高纵向分辨率,对一组沿光轴排列的旋转孔玻片进行成像,可以在获得的图像中区分不同的旋转孔,验证了断层扫描的功能。对青蛙卵细胞进行显微3D断层扫描,显示了散焦-聚焦-散焦过程的清晰演变和高分辨率,因此可以区分细胞膜和细胞核的深度。
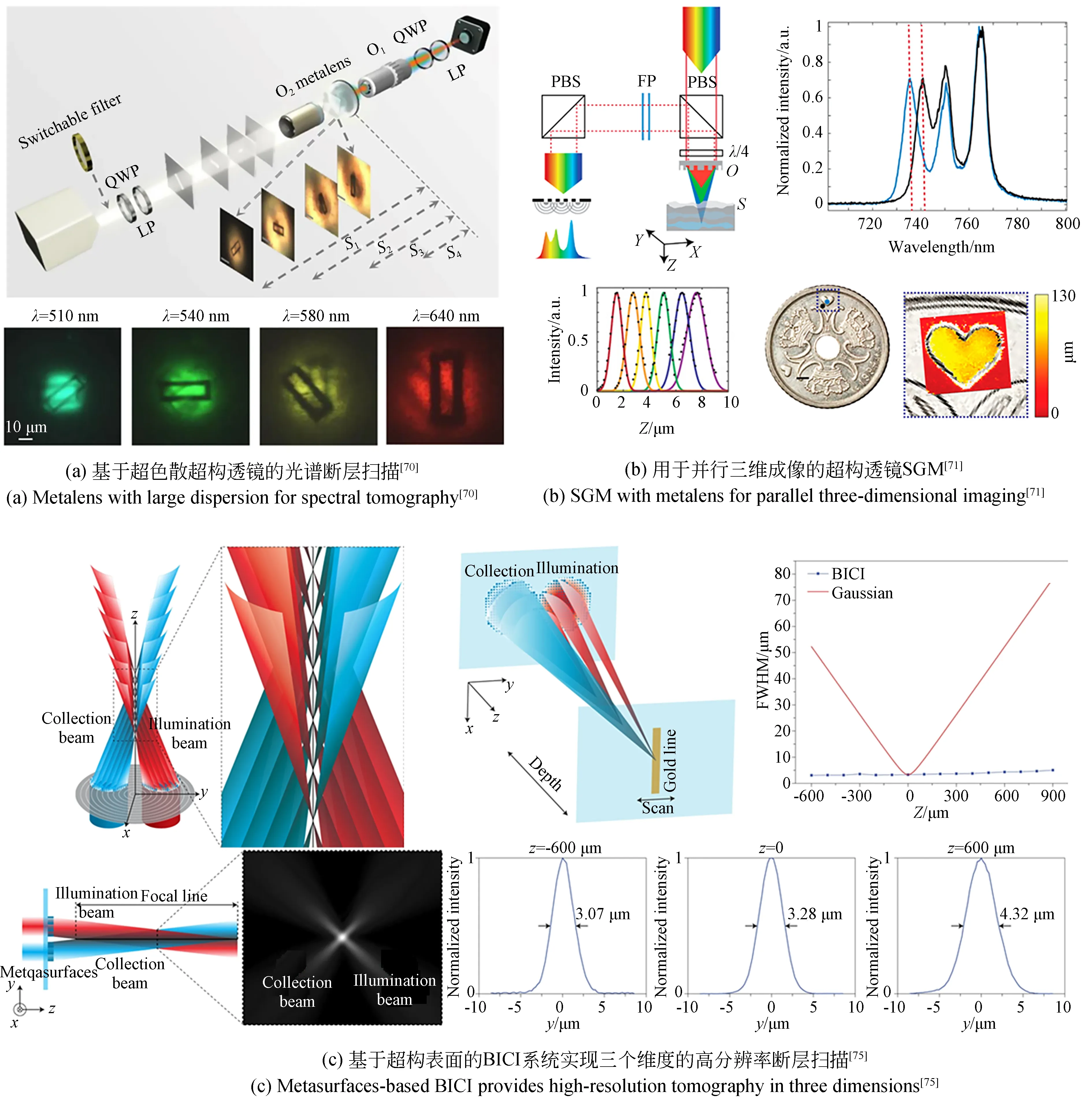
图4 超构表面用于3D断层扫描Fig.4 Metasurfaces for 3D tomography
传统的三维生物显微中,获取深度信息通常需要在轴向维度上进行额外的扫描,牺牲部分的空间分辨率以保证时间分辨率,因此动态生物的快速高分辨三维成像仍有待完善。Edrei等[71]提出了一种光谱门控显微镜(Spetrally Gated Microscopy,SGM)。SGM通过共振失配来抑制离焦光,实现光谱抑制。如图4(b)所示,SGM利用超构透镜的强色散进行波长多路复用,可以在单次拍摄下对不同深度平面同时进行采集,从光谱的变化信息中获取深度信息。该系统有效利用了光谱域的信息维度,有助于实现快速高分辨3D成像。实验对硬币进行3D成像,选择硬币的一部分区域,记录该区域内两个点的光谱,通过光谱与深度的转换关系获得硬币的深度信息,但是成像的深度范围较小,仅为微米级别。在相对较大的深度范围内保持高分辨率的光学成像一直是动态生物显微成像所追求的目标。传统的共焦[72]和双光子显微镜[73]等显微成像方式仅能够对焦点周围的狭窄区域实现高分辨率成像,且需要额外的扫描部件相对于目标进行轴向平移实现深度分辨成像,成像深度仅为几百微米。光学相干层析成像(Optical Coherence Tomography,OCT)[74]利用相干门控的原理捕获散射组织的实时深度分辨图像,但由于衍射的问题只能实现毫米深度的三维成像,因此横向分辨率和聚焦深度之间相互制约。最近,Pahlevaninezhad等[75]提出了一种双射光收集成像(BICI)的概念,能实现三个维度的高分辨率断层扫描。利用超构表面的调制能力,在成像光路中布置了照明和收集两条路径,沿焦线定义的照明光和收集光在空间中一一对应,如图4(c)所示。应用BICI克服了高分辨率OCT的局限性,在1.25 mm深度范围内具有约3.2μm的横向分辨率,能够在大深度范围内实现高分辨率成像。
2.2 被动式三维成像
被动式三维成像技术通过透镜会聚光线到图像传感器进行成像,再对图像传感器采集到的数据进行处理获取三维信息。与主动式三维成像技术相比,被动式三维成像不需要复杂的投射器和接收器等设备辅助,可以极大地减小系统的复杂度和功耗。被动式三维成像根据成像时使用的透镜数量和原理可以分为透镜阵列型和单透镜型。
2.2.1 透镜阵列型三维成像
透镜阵列型三维成像是使用多个透镜拍摄具有不同视差信息的多幅图像,再通过图像之间的匹配关系计算出场景的深度信息。光场成像是一种典型的透镜阵列三维成像技术,能同时捕获光线的强度和方向信息。传统的光场成像使用微透镜阵列作为光调制器,存在加工困难和固有性能缺陷的问题,限制了其应用和发展。超构表面可以实现透镜会聚功能,称为超构透镜。相比传统微透镜,超构透镜无需级联透镜即可实现色差校正,使成像设备进一步小型化。目前,可见光波段的宽带消色差超构透镜的幅面尺寸较小[76],因此有人提出使用空间孔径复用的超透镜阵列进行光场成像,有望实现大孔径高分辨成像,为紧凑型光场三维成像设备的实现提供了新途径。
2019年,Lin等[77]通过合理调节纳米柱和纳米孔的结构参数进行相位设计,实现了补偿纵向色差的可见光宽带消色差超构透镜。通过空间孔径复用制造60×60的超构透镜阵列,用于可见光全彩成像的光场相机,可在传感器上生成全彩色的元素阵列图像,再通过计算机图像渲染,拼接出具体不同焦深的多幅图像,最后使用算法估计出深度信息。整个过程计算量较小,能够进行动态实时深度感知,如图5(a)所示。虽然光场成像可以使超构透镜实现更高分辨率的成像,但是空间分辨率和角度分辨率相互制约,而图像传感器的总像素数量有限,所以光场成像的最终图像分辨率仍然较低。2020年,Park等[78]提出了一种基于偏振复用介电超构表面的虚拟移动超构透镜阵列(VMMA),它在不进行物理移动的情况下,通过简单地调整入射光束的偏振态来实现采样位置的横向移动,如图5(b)所示。通过设计超构透镜的相位分布实现偏振复用,使得每个超构透镜单元在不同偏振光入射时焦点产生移位。成像时采样间隔减半,在不牺牲角分辨率的情况下,采样分辨率增加了2倍,再通过算法拟合图像,光场图像信息量通过时分复用移位方案增加了4倍,最终图像分辨率增加4倍,并且深度信息不会退化。光场成像常用于三维显微成像中,使许多生物和临床应用成为可能。单粒子跟踪(Single Particle Tracking,SPT)[79]是研究生物动态过程的显微成像技术,它使用基于微透镜阵列的光场成像可以实现三维SPT[6],但是受到光传播时衍射效应的限制,在横向分辨率和焦深之间存在衍射强加的折中关系,难以在相对较大深度范围内进行高分辨率光学成像。2019年,Brongesma等[80]提出了一种实现三维单粒子跟踪的光场超构表面,通过相位复用设计了具有相同轴向焦距的三焦点超构透镜,单次拍摄下生成3幅单个珠子的不同图像,如图5(c)所示。该光场超构表面可以适配未经修改的显微镜,以更高的空间分辨率收集3D信息,克服了基于光场的方法在空间分辨率方面的损失,唯一的代价就是牺牲了FOV。三维显微成像的目标非常小,因此减少FOV并不是关键问题。在0.5 mm×0.5 mm×0.3 mm体积内进行多个荧光粒子的同时跟踪,该方法具有亚微米水平和微米水平轴向分辨率。

图5 基于超构表面透镜阵列的三维成像Fig.5 Three-dimensional imaging based on metasurfaces-lens array
超构透镜阵列在其他三维成像中也有所应用,Liu等[81]使用基于几何相位的结构单元设计了3个六边形的TiO2超构透镜形成阵列,实现了紧凑型像差校正的三维定位设备。3个超构透镜分别成3个图像,使用互相关的梯度下降算法对它们进行单色像差校正以提高成像质量,再分析匹配3个图像的平移关系获取深度信息,如图5(d)所示。总尺寸为379.5μm的超构透镜阵列能实现水平和垂直定位,且具有较高的相对定位精度(0.60%~1.31%),如图5(c)所示。当使用更大数值孔径(NA)的超构透镜时,可以进一步提高定位精度,在小型化定位系统和高精度紧凑型视觉传感器中具有应用潜力。透明样品的定量相位成像(Quantitative Phase Imaging,QPI)[82]在多种生物医学应用中发挥着至关重要的作用,如即时护理和体内应用等。QPI系统通常需要设置干涉来检索相位信息,光学系统复杂而庞大,使得微型QPI显微镜直到现在仍然不可实现。Kwon等[83]提出了一种具有3个优化超构透镜的双平面光学系统(QPGM)用于相位显微成像。该系统充分利用了超构表面的偏振和空间复用功能,垂直级联了两个超构表面层,可同时捕获3种不同的干涉图样,再通过反演得到3张相位,使用三步移相算法的相位检索方法[84],通过差分干涉对比提取定量的相位梯度信息,进而提取样品的亚微米尺度轴向分辨率的高度信息,如图5(e)所示。
2.2.2 单透镜型三维成像
在基于透镜阵列的三维成像中,通常需要将透镜按照基线间距进行排布,以满足深度测量的精度,这无疑增大了系统的体积。透镜阵列三维成像获取多幅图像后通过算法处理得到深度信息,处理的数据量较大,时效性较差。在系统体积和数据量方面,单透镜型三维成像系统显得更具优势。单透镜三维成像技术主要是通过离焦的方式,根据PSF随物方深度的变化来获取深度信息。传统离焦法通过镜头的物理移动获取焦深图像序列,需要机械装置辅助且测量精度有限。DOEs可进行相位掩膜定制,在透镜相位之外增加额外的相位,使得PSF具有深度识别的特性。例如双螺旋点扩散函数(DH-PSF),设计相位掩膜使得成像时随深度变化而产生旋转的PSF,通过分析图像的功率倒谱,可计算物体的深度和强度信息。但是,目前的DH-PSF存在效率低、体积庞大且难以集成的缺点。
超构表面灵活的相位设计结合计算成像等图像处理方法进行辅助,可以实现更加快速和高精度的单透镜离焦法三维成像。Guo等[85]通过空间孔径共享在单个超构透镜上设计了2种不同焦距的透镜相位分布,可在横向和纵向分离的不同空间位置形成两幅具有不同散焦属性和透视关系的图像,再通过简单的算法对齐图像,提取目标的二维深度图。如图6(a)所示,直径为3 mm的超构透镜可测量10 cm距离内的深度,每个输出像素使用少于700个浮点运算,并且仅涉及25×25个像素空间领域,因此计算数据量较小,可实现实时深度计算。如图6(a)所示,在不同真实场景下进行深度测量实验,超构透镜可以对蜡烛火焰等动态透明物体进行深度测量,证明了其深度测量的优异性能。超构透镜在成像时色散严重,这种色散会影响成像质量,许多研究都是尽力消除色散,但是色散也可以作为额外自由度辅助计算三维成像。Tan等[86]利用超构透镜对不同波长的光线具有不同光焦度的特性,提出了紧凑、单次和被动的3D成像相机。超构透镜将不同波段的RGB三色光聚焦在不同深度的散焦图像上,再通过两个卷积神经网络U-Net进行图像重建,恢复出深度图和RGB纹理信息,如图6(b)所示。在可见光谱下,对直径为1 mm的超透镜进行数值模拟,结果表明它能够捕获0.12~0.6 m的3D深度信息和纹理信息。
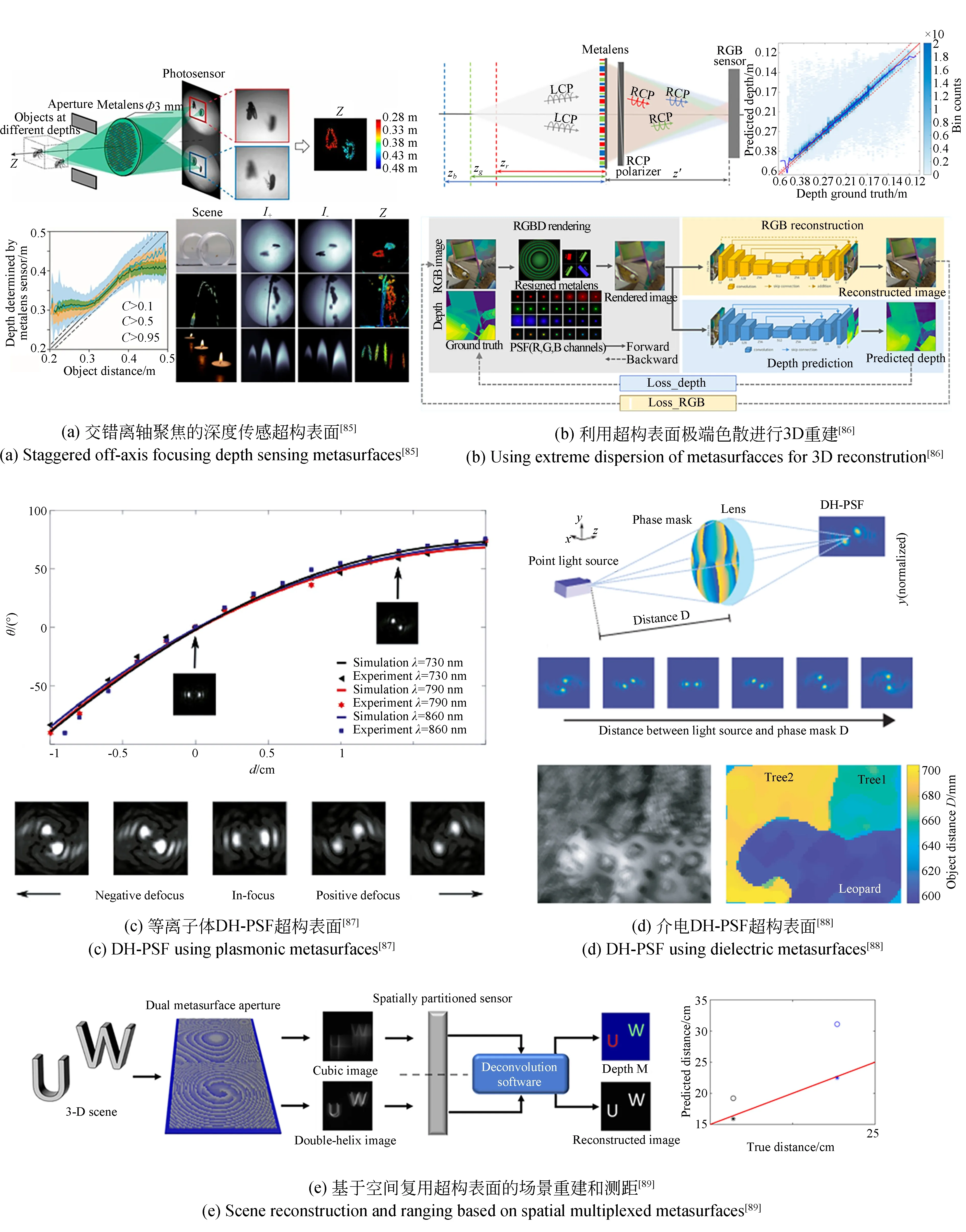
图6 超构表面用于基于离焦深度的三维成像Fig.6 Metasurfaces for three-dimensional imaging based on defocus from depth
超构表面独特的相位设计功能,可突破传统DH-PSF的瓶颈,实现紧凑型DH-PSF离焦深度成像系统。Jin等[87]根据几何相位原理设计了透镜会聚相位掩模与DH-PSF相位掩模相互组合的等离子体超构表面,极大缩小了DH-PSF元件的体积。如图6(c)所示,轴上单物点和轴外双物点的成像和深度在120°的大范围内近似保持线性关系,有效深度约为20 cm,深度测量的分辨率为6(°)/cm,其传输效率为70.3%,能够在可见光波段和多个入射偏振态下工作。但是金属存在的欧姆损耗限制了透射效率,于是Jin等[88]设计了基于全电介质的DH-PSF集成惠更斯超构透镜。利用共振惠更斯圆柱形的硅(Si)纳米柱阵列对超构透镜以及DH-PSF进行物理相位编码。在近红外波段实现了高透射率,通过DHPSF的旋转角度可以推断出距离信息,如图6(d)所示。但是DH-PSF只适用于近轴衍射波,所以导致其存在轴向分辨率低,数值孔径低和视场角小等问题。为了提高DH-PSF获取的二维强度图和深度图的分辨率,Colburn等[89]将三次方相位掩模和DH-PSF相位掩模并列排放于单个超构表面,能在可见光波段对场景中的深度信息被动编码成两个互补PSF,通过同时产生聚焦加速光束和聚焦旋转光束来扩展景深并提高精度,最后对捕获的数据进行反卷积解码,重建出二维强度图和深度图,计算视场上Gouy相位的变化来估计超构表面的场曲,测距误差仅为1.7%,如图6(e)所示。
3 超构表面在三维显示领域的应用
随着人们生活水平的不断提高,传统二维显示设备已经无法满足人们的观看需求,三维显示是未来显示设备的发展趋势。三维显示设备主要有裸眼3D显示屏和近眼3D显示器,它们追求的性能目标是大视场、连续视差、轻薄化和小型化等,现有的三维显示设备还无法同时具备这些性能[90]。超构表面具有良好的光束波前操纵能力和多功能轻薄集成的优点,能作为三维显示设备的关键光学器件,例如多焦点[91]以及功能集成[92]的超构表面等,为开发性能更优的新型紧凑型三维显示设备提供了新途径。
3.1 三维全息显示
传统的光学全息术需要复杂的拍摄过程来记录目标物体的光束干涉图案和参考路径,难以实现虚拟物体的全息重建[93]。1966年,Brown和Lohman发明了计算机生成全息(Computer Generated Holography,CGH),使用物理光学理论来生成干涉图案[94]。CGH需要复杂的光场调制能力,可以使用SLM等数字光场调制器进行全息显示[95],但是像素尺寸大,调制原理存在固有缺陷。超构表面拥有强大的光场调制能力,可以用于生成全息图,即通过物理和数字理论计算,并根据设计的相位分布排列超构表面的结构单元,组成目标CGH图案。与传统的CGH调制设备相比,超构表面设计全息图具有自由度大、空间分辨率高、噪声低、空间带宽积宽,以及消除多级衍射等优点[96]。Huang等[97]于2013年使用基于几何相位的等离子体超构表面首次实现轴上3D超全息图,消除了传统全息术多级衍射的影响,具有宽视场和高分辨率的优势。首先,通过数字合成和数字计算生成3D CGH,然后再根据超构表面几何相位的原理,将3D CGH的相位信息编码到超构表面结构单元阵列中,最后通过传统的光传输方案重建图像。如图7(a)所示,在810 nm波长的圆偏振光照射下,设计制备的喷气机3D CGH超构表面在轴上重建了喷气机的3D全息图像。调整物平面远离超构表面,可以得到一系列2D图像,可以清晰地看到焦点随着距离的移动而变化,证明了3D全息图像具有深度信息,但是只限于轴上的深度信息。Li等[98]使用石墨烯氧化物制备超构表面创建了宽视角3D全息图。石墨烯基材料是一种芳香碳原子层,具有出色的电子和光学特性。采用单飞秒脉冲光束对石墨烯氧化物进行非热还原,可以调制多级折射率,然后根据3D宽视角图像的全息相关性编写相位调制。如图7(b)所示,将高数值孔径(NA)物镜和超构表面结合,使每个焦点的尺寸减小到重建光束的亚波长尺度,从而增加视角。当像素尺寸减小到0.55μm时,视角增加到52°。
根据RGB波长多路复用可组合成彩色3D图像,但是在实现全彩全息时,工作带宽的增大会产生严重的串扰,影响全息图像质量。因此,如何在宽波段下减少不同颜色之间的串扰成为实现彩色3D全息的关键。Xiong等[99]提出了一种克服串扰的新方法,设计了单一类型等离子体超构表面,将离轴照明方法应用到超构表面全息术中,不同波长的激光束斜射在由纳米狭缝天线形成的超构表面上,然后将设计角度的输出光束叠加以形成最终的多色图像,并且克服了不同颜色之间的基本串扰。如图7(c)所示,通过实验展示了在立体空间中重建全彩色超全息图像,3D对象由RGB点源集合表示,然后将全息图平面上的复振幅计算为由所有点源组成的整个3D物体的光场叠加,设计了一个由20个不同颜色光点组成的3D彩色螺旋图案。在z轴的不同位置使用CCD相机捕获全息图案,可以获得颜色不同的星图,验证了3D图像的深度信息。这些使用超构表面生成3D全息的研究大多数是通过多幅2D全息图像拼接成3D全息图像,其图像的角度是固定的,无法在多个视角下观察到3D图像,使得其在三维显示领域的应用受到限制。Choi等[100]于2020年提出了一种能提供双目深度线索的超构表面立体全息技术。如图7(d)所示(彩图见期刊电子版),超构表面由几个全息图块(绿色和蓝色框)组成,根据不同的观察方向(绿色和蓝色箭头)显示目标3D对象相应的2D全息投影。渲染了一个由3条杆组成的3D结构,体积为25 μm×25μm×25μm,这3条杆位于不同的深度:上杆、中杆和下杆分别位于z轴上相对于目标结构中心的-12.5,0和+12.5μm处。超构表面重建的3D全息图由多张全息图片段组成,沿平行于x轴的子午线的观察角度生成目标3D结构的2D投影,从-30~+30°的观察角度以10°的步长渲染出透视投影,实现了具有双目深度线索的立体效果,如图7(d)所示。

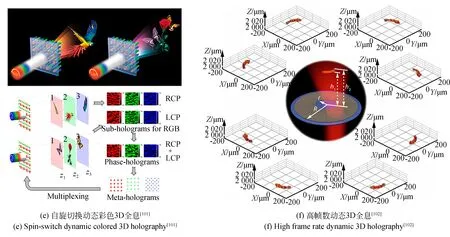
图7 超构表面用于3D全息显示Fig.7 Metasurfaces for 3D holographic display
随着静态全息技术的成熟,人们开始研究动态全息,实现动态的3D全息是全息显示的最终目标。Hang等[101]提出了一种自旋切换全息3D全彩场景的介质超构表面,其超分子由3种不同的超原子组成,能够独立调制红光、绿光和蓝光。通过改进的G-S算法检索3D全息图的波前,设计超构表面的相位分布,实现改变照明圆偏振光的螺旋度来切换重建的全息3D全彩图像,大大增加了设备的信息容量。如图7(e)所示,使用633,532和473 nm波长重叠的激光束组成的右旋圆偏振光照射超构表面,会出现3D全彩鹦鹉。当右旋圆偏振光照明切换到左旋圆偏振光时,图像会变成一朵带蝴蝶的花朵。这两个3D场景都被分成了3个切片,鹦鹉(花蝴蝶)的前翅(第一只蝴蝶)、身体(花)和后翅(第二只蝴蝶)分别在距离超构表面5,7和9 mm处生成。在可见光下实现高帧数的动态3D全息是实现三维显示最理想的效果。2020年,Gao等[102]提出了一种基于空间通道多路复用的大帧数高帧率的可见光动态3D超构表面全息,可以实现228个不同的全息帧和可见光范围内极高帧速率的动态全息显示。如图7(f)所示,一个环形的全息超构表面具有8个空间通道,每个空间通道在立体空间中重构一个3D箭头,使用激光束依次照射每个空间通道,可以进行平滑的动态3D全息显示。
3.2 光场显示
光场显示使用折射透镜组成的光场调制器件,将编码的光场信息投射到空间中的不同方向,形成具有连续视差的真实光场3D场景,被认为是目前最具前景的裸眼3D显示技术之一[103]。然而,传统折射微透镜的像差严重影响了重建3D场景的观看质量,而具有容许像差的小焦距微透镜需要级联多个光学元件,制造的难度、复杂度,质量和体积都会增大。超构表面作为新型的平面光学元件,能以亚波长空间分辨率进行波前调制,并具有良好的像差校正能力,有望弥补传统光场显示的不足。Zhang等[104]设计了一种两层相邻的电介质超构透镜阵列用于光场显示。两层超构透镜具有不同的相位分布,分别对不同偏振旋向的入射光进行调制,提供了更大的优化自由度,在离轴入射时具有更好的成像性能。但是仍然需要权衡空间分辨率与角度分辨率之间的关系。Zhang等[105]结合几何相位和传播相位设计了偏振复用的双功能超透镜阵列并用于近眼光场显示器。如图8(a)所示,焦距和间距可以根据入射光的偏振状态进行切换,进而调整观察分辨率和出瞳直径,提高了灵活性。这些超构透镜阵列光场显示只能在单一波长下实现,不满足人眼的全彩显示需求。Fan等[106]设计了一种宽带消色差氮化硅(SiN)超透镜阵列,在白光下用于光场显示中重建全彩的3D场景。如图8(b)所示,“3”和“D”的3D场景用算法编码,然后在光场显示的过程中重建具有深度信息的图像,并随着聚焦位置的变化而逐渐清晰和模糊。超构透镜阵列包含60×60个偏振不敏感的超构透镜,每个超构透镜中的纳米单元都经过精心设计,有效消色差折射率分布在430~780 nm,具有近衍射聚焦的分辨率。此外,该消色差超构透镜阵列仅由单层超薄厚度为400 nm的氮化硅层组成,适合片上混合CMOS集成和光电子信息的并行处理。

图8 超构表面用于光场显示Fig.8 Metasurfaces for light field display
裸眼3D显示器是最符合人眼观看习惯的理想显示设备,但是其研制目前还存在许多技术难题。全息3D显示所需的信息量太大,使用现代电子设备难以实现有效传输,导致全息3D显示器的刷新速率和FOV有限。光场3D显示作为全息3D的采样形式,可以极大减小数据量,是目前实现3D显示器的最佳选择。Qiao等[107]提出了一种裸眼全息采样3D显示,采用超构表面光栅调制每个像素点的相位信息形成聚合视点,改善了串扰和边界调节冲突带来的视觉不适。当视点紧密排列时,全息采样3D显示可以近似为一个连续的光场,即光场3D显示,使用二维光栅和纳米压印手段制备了大规模超构表面光栅视场调制器,并与平板显示器兼容构建了3D显示屏,在LED白光照明下实现高刷新率且无视觉疲劳的动态全彩3D显示,如图8(c)所示。但是现有的显示面板的分辨率有限,光场3D显示的空间分辨率、角度分辨率和视角之间会相互制约。例如,要实现具有1K空间分辨率和3°垂直和水平方向角度分辨率的3D显示,需要具有50K分辨率的显示面板来实现150°的视角,现有的显示面板难以满足分辨率要求。Qiao等[108]提出并制备了一种具有空间变异分辨率的光场3D显示屏,它由具有不同形状的超构表面光栅混合排布而成。根据观察频率投射空间变化的信息,即密集封装的视图排列在中心,而稀疏排列的视图分布在外围,在中心视角区域能够呈现平滑过渡运动视差的高分辨率图像效果,而在外围视角则采样分辨率低,但是增大了视角,如图8(d)所示。这种方法抑制了冗余的深度信息并将FOV扩大到与2D显示面板相当的范围,通过演示具有视频速率的全彩色3D显示器,水平视角达到了160°。
3.3 近眼显示
AR及VR近眼显示设备作为下一代交互式显示设备,面临着视野(FOV)、眼眶、角度分辨率、动态范围和正确的深度提示等性能上的挑战。为了提供友好的佩戴体验,AR和VR追求轻量级的紧凑型外形。然而,上述要求往往需要相互权衡,这使得高性能AR/VR眼镜的设计特别具有挑战性。
超构表面具有任意波前整形能力以及超轻超薄的优点,能用于实现性能更加完善且轻薄的近眼显示设备,因此成为AR/VR领域的研究热点。2018年,Lee等[109]开发了一款使用超构表面目镜的AR近眼显示系统,具有超宽FOV、全彩成像、高分辨率和大眼眶的优势。该超构表面基于几何相位和介电材料进行设计,实现了虚拟图像投影和透明度控制。如图9(a)所示,系统由超构表面目镜、光束投影仪、4f中继系统、分束器、二向色镜和圆偏振器组成,通过实验演示了3D全息AR显示,将图像浮动显示在空间中,图像随着焦点的变化变得清晰和模糊。随着元宇宙概念的提出,对VR显示设备提出了更高的性能要求。为了解决超构表面的色差问题,Capasso团队[110]利用来自多个区域的光进行相长干涉和色散工程来实现原色的衍射限制,设计了消色差聚焦的超构透镜,并将它应用于VR系统,实现了紧凑型的光纤扫描近眼显示器。VR效果展示如图9(b)所示,通过向声光调制器施加多级电压来创建3D效果的灰度图像。该超构透镜也可用于AR显示,通过光学组合器混合虚拟对象和现实场景,设计多焦点的RGB消色差超构透镜来生成深度线索,使得成像效果更加真实立体。AR和VR的近眼显示器存在辐辏调节冲突,严重影响观看的舒适度,因此Song等[111]针对这些问题,开发了大出瞳的紧凑型全息3D显示器。该显示器具有10 mm×8.66 mm的大出射光瞳,能够渲染具有约50K活动数据点和0.5~2 m连续深度的3D场景,并以AR方式与现实世界重叠,同时提供视差和调节线索,解决当前3D显示器存在的会聚-调节冲突,如图9(c)所示。

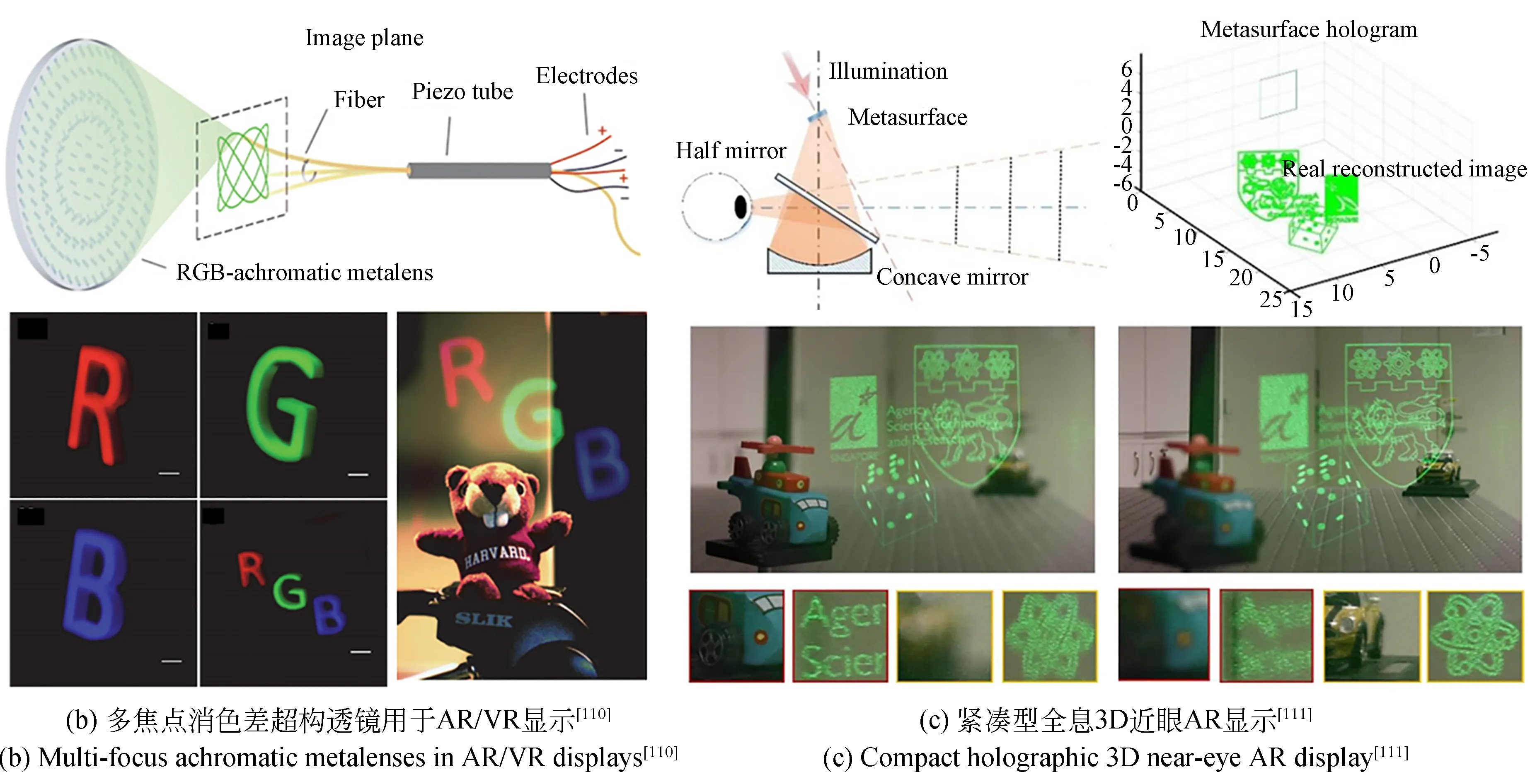
图9 超构表面用于近眼显示Fig.9 Metasurfaces for near-eye display
4 总结与展望
本文重点介绍了超构表面在三维成像与显示技术领域的应用进展。当前三维成像与显示技术受到传统光学元件的限制,存在体积庞大和不同性能之间相互制约等问题。超构表面作为新型的平面光学调制器件,具有灵活的光场调控能力以及多功能、轻薄和易集成的优势,在三维成像与显示领域具有广阔的应用前景。在主动式三维成像中,超构表面作为点云投射器件,有利于产生大视角、高效率和强度均匀的点云阵列;作为光束扫描器件,可以实现动态的大范围扫描,无需辅助的机械部件;作为显微系统的断层扫描器件,有利于对动态生物标本进行快速实时成像。在被动式三维成像中,超构表面的色差校正以及近衍射极限聚焦功能可以实现高质量的紧凑型光场成像和离焦成像设备。在三维显示领域,超构表面作为关键光学器件,在高性能和轻薄型三维显示设备中发挥了巨大的优势。
虽然超构表面在三维成像与显示领域的研究取得了丰厚的成果,但是仍然面临许多挑战。在点云投射方面,超构表面将入射激光束衍射成点云阵列,仍然存在零级衍射,衍射效率不够高和点云数量不足的缺陷,目前仅能在较短的距离内进行有效的三维成像,因此需要提升超构表面的性能,实现更高质量的光束投射。大多数超构表面实现的光束扫描方案,只能实现一维点扫描,并且最大视场仅为商用的最低标准,且还未实现连续扫描。在被动式三维成像和三维显示领域中,大多数成像设备用于可见光波段,因此超构透镜的全彩成像是其中的关键,但是目前的全彩消色差超构透镜的数值孔径、效率和带宽等性能会相互制约。超构表面实现的三维全息显示还只是具有深度信息的二维全息图投影,并不是连续立体的三维全息。随着超构表面设计复杂度的提高,不同功能通道之间的串扰问题以及效率问题仍然有待解决。因此,超构表面需要在性能提高和功能拓展等方面不断改进和突破。
超构表面的未来发展方向包括人工智能赋能的超构表面逆向设计和可调谐的多功能集成超构表面。近年来,通过快速电磁仿真方法和学习框架的联合优化,超构表面的性能已有所改进,包括数值孔径、工作带宽和衍射效率等方面的改进[112-113]。然而,这些性能之间存在相互制约的关系,使得超构表面透镜仍难以满足商业化需求的高效率、宽视场和宽工作带宽的消色差成像[114]。发展人工智能算法辅助超构表面的逆向设计,能够实现具有更高自由度的任意纳米单元结构设计,为超构表面的性能优化和功能调控提供更大的设计空间,已经通过高级电磁优化[112,114-119]和深度 学习[120-122]得到验证。目前,研究人员开展了各种功能性超构表面光学系统的研究,例如偏振相机[123-124]、光谱仪[125]和光场相机[77,106]等,但 是 现有的超构表面功 能 单 一 和 固定,在光学系统中充当光学器件时需要较大的空间光路,没有发挥超构表面集成化的优势,限制了光学系统的实时性和适用性。主动可调谐多功能集成的超构表面是拓展其应用场景的关键[126],通过超构表面与活性介质和光源等其他元件的片上集成,有望实现批量生产的芯片级功能型三维成像与显示系统。在未来,人工智能赋能的超构表面逆向设计和可调谐的多功能集成超构表面的研究为三维成像与显示系统带来了超越传统方法的巨大机遇,并推动光学系统向着革命性的小型化和多目标功能方向发展。
