基于六轴空间支架的胫骨骨折端力学环境测量方法研究①
2022-08-31毛芸生叶俊材杨庆华
方 航 毛芸生 叶俊材 杨庆华③
(∗浙江工业大学机械工程学院 杭州310023)
(∗∗浙江工业大学特种装备制造与先进加工技术教育部/浙江省重点实验室 杭州310023)
(∗∗∗浙江医院骨科 杭州310030)
0 引言
六轴空间支架(six-axis special frame)与传统的内固定治疗方法相比具有使用简单、创伤小、不伤害软组织、并发症少、治疗时间短等优点[1-2]。骨折治疗中存在的主要问题之一是难以量化地判断骨折愈合情况[3]。骨折愈合过程通常代表着骨折处骨骼的强度和刚度的稳定增长,即弹性模量的增长[4-5]。目前胫骨骨折愈合分析主要基于射线照相和临床评估,这种分析方法依赖于医生的临床经验[6]。测量骨折端力学环境,对判断骨折愈合情况具有重要意义[7]。
本文设计了基于六轴空间支架的胫骨骨折端力学环境测量方法。经过十几年的发展,针对不同外固定架治疗方式已有相当多的研究成果[4]。文献[8]开发了一种遥测系统通过测量内固定钢板的弯曲载荷来测量骨折端力学环境。文献[9]将应变片布置在单臂外固定架上,通过测量外固定架的应变来间接测量骨折端的受力情况。文献[10]设计了生物力学间接检测系统,并通过动物实验对其进行验证。文献[11]通过有限元方式分析了安装单臂外固定架的股骨整体应力分布情况。文献[12]在外固定架的上下环间安装轴向拉压传感器,通过分析外固定架的轴向载荷分担比来间接判断骨折恢复情况。
上述研究主要研究了基于内固定钢板、单臂外固定架和Ilizarov 外固定架的骨折端力学环境间接测量方法,对基于六轴空间支架的骨折端力学环境测量方法的研究报导较少。本文基于并联Stewart平台的正逆运动学分析,推导出通过基于六轴空间支架的骨折端力学环境测量方法;采用有限元仿真的方法初步验证该计算方法的可行性;建立了力学实验台,通过实验验证了该测量方法的有效性。
1 基于并联Stewart 平台的六轴空间支架受力分析
六轴空间支架系统由固定环、钢针、螺母立柱、可伸缩螺纹杆、胫骨上下端组成[13],其结构如图1所示。

图1 六轴空间支架结构以及受力简图
患者通过手术安装上六轴空间支架后即可开始康复训练[14]。设胫骨顶端受到竖直向下的压力Fup,6 根连杆分别存在一个对上固定环支撑力Fi(i=1,2…,6)。骨折端的支撑力Fmid,将上固定环与上端胫骨看做一个整体,由静力学定理可以得出Fmid的计算公式:

其中Fup和Fi的大小可以通过在外固定架和患者足底或受力点安装传感器等方法获取,关键在于得到连杆上力的方向。
六轴空间支架可以看做一个并联Stewart 平台,也可将连杆看做二力杆,连杆上力的方向即为连杆的方向。在实际患者康复测评过程中,连杆相对于全局坐标系的方向是较难实时获得的,连杆的长度可以直接读出,因此对六轴空间支架机构位置正解,是研究中最重要一步[15]。
首先建立六轴空间支架平台的等效坐标系俯视图,如图2 所示,下平台的中心点O设置为等效坐标系原点,粗实线代表六轴空间支架平台的下平台,细实线代表六轴空间支架平台的上平台,连接上下铰链之间的连杆,用虚线表示。将六轴空间支架的下平台作为静平台,上平台作为动平台。

图2 六轴空间支架平台等效坐标系俯视图
Ai(i=1,2…,6)代表上平台6 个万向节铰点,在上平台坐标系中的矢量为Ai=[Aix Aiy Aiz]T;Bi(i=1,2…,6)代表下平台6 个万向节铰点,在下平台坐标系中的矢量为Bi=[Bix Biy Biz],上平台的位姿K表示为

式中,P0为上平台中心点相对于下平台坐标系中的位置矢量,δ为上平台坐标系绕x、y、z轴的欧拉角矢量。上平台坐标系相对于下平台坐标系的旋转矩阵为

上铰点在上平台坐标系中的向量可变换为该点在下平台坐标系中的向量。由式(2)可得各连杆的长度li(i=1,2,…,6)。

正向运动学求解的思路是设定初始上平台位姿,通过逆向运动学求解出6 根连杆的长度;通过牛顿迭代法,不断修正上平台的位姿,直到求解出连杆的长度与实际测量连杆的长度差值的最大值max|Δli(6)|,当其小于允许偏差时停止计算。其算法流程图如图3 所示。

图3 六轴空间支架正向运动学算法流程图
由六轴空间支架正向运动学可求得当前连杆长度下上平台的姿态K。由式(3)可得各连杆上的力。

其中|Fi|为连杆上所受力的大小,可通过连杆上的传感器直接读出,力的方向是一个关于K的函数,由式(2)可得。在已知6 根连杆上力的大小和方向的情况下,代入式(1),得到骨折端的受力情况。
2 六轴空间支架系统的有限元分析
本节采用ANSYS Workbench 仿真分析六轴空间支架系统的受力情况,对第1 节所得计算方法进行验证。
建立六轴空间支架系统的有限元分析模型,在ANSYS Workbench 采用patch independent 算法对其进行网格划分,网格划分后的模型如图4 所示。参考国内外文献资料,得到六轴空间支架系统各个部件的材料属性[16-17],如表1 所示。将得到的材料属性输入到Workbench 中。

表1 各材料参数
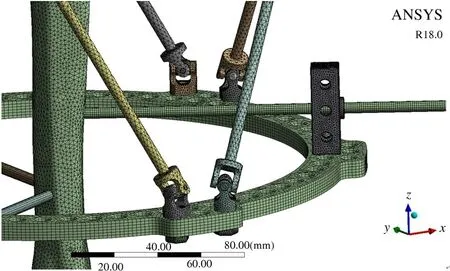
图4 网格划分模型
相比于实际的六轴空间支架模型,有限元分析需对模型做出以下假设:(1)六轴空间支架各部件连接紧密;(2)外固定架和骨骼、愈伤组织为各项同性材料;(3)外部载荷沿着轴向均匀地施加在上端骨骼上表面;(4)忽略肌肉、软组织等对骨骼与钢针的力;(5)愈伤组织和上下断骨接触面完全约束,不存在平移和旋转;(6)忽略万向节之间的摩擦力;(7)下端断骨与地面相对静止,不存在平移或旋转。
对模型进行求解计算,ANSYS 求解得到各连杆以及骨折端的受力情况,图5 为Workbench 得到的连杆和骨折端受力情况图。

图5 Workbench 中六轴空间支架受力情况
表2 为愈伤组织弹性模量为0.5 MPa、轴向压力500 N 时各部位的受力大小。

表2 六轴空间支架各部位受力情况
显然,连杆和骨折端上的径向力远小于轴向力即连杆上轴向力,因此将连杆和骨折端上轴向力当做该部位所受力是可行的。在已知各杆杆长和轴向力的情况下,根据第1 节正运动学计算方法,得到各连杆上力的方向。根据式(1)计算骨折端所受力Fmid,与Workbench 仿真得到骨折端轴向力Fs进行对比,得到计算公式的误差率ρ;同时计算骨折端轴向载荷分担比η[18],即骨折端所受的轴向力与施加的压力的比值。

修改愈伤组织的弹性模量,通过仿真得到在轴向压力为500 N 时,计算公式的误差率ρ和骨折端轴向载荷分担比η随着骨折端愈伤组织弹性模量E增加的变化情况。如图6 所示。观察图6 可以发现,随着骨折端愈伤组织弹性模量的逐渐增加,即代表骨折不断愈合,骨折端轴向载荷分担比η逐渐增大,该计算方法的误差率ρ逐渐降低。在弹性模量较小时,其误差率相对较大,是由于弹性模量较小时其连杆上受力较大,连杆上径向分力相对较大,因此直接将连杆轴向力近似为连杆所受力会产生一定误差。除此之外,在愈伤组织弹性模量较小时,受到轴向压力时其骨折端会产生较大变形,导致外固定架产生一定位移,其连杆实际方向与通过Stewart 并联机构正运动学计算得到方向的有一定偏差,也会产生一定的误差。随着骨折端愈伤组织弹性模量增大,这些影响误差率的因素都会减弱,其误差率逐渐接近于0。由此可以初步判断,通过该计算方法来计算骨折端受力环境是可行的。

图6 误差率和轴向载荷分担比变化图
在弹性模量增大的初期,其骨折端轴向载荷分担比η增大的速率较快,在弹性模量增大的后期,其骨折端轴向载荷分担比η增大的速率逐渐降低。可以发现在骨折愈合初期,连杆上承载了较多的力,而随着骨折的逐渐愈合,骨折端承载的力逐渐增大,因此将骨折端轴向载荷分担比作为判断骨折愈合的依据是可行的。
3 基于六轴空间支架的骨折端轴向加载力学实验
搭建实验台,通过3D 打印弹性模量与人体骨骼相类似的骨折模型[19],在骨折端安装型号为DYDW-006 的三轴力传感器,在传感器与下断骨模型之间置入不同弹性模量的聚二甲基硅氧烷(PDMS)作为愈伤组织模型。将骨骼模型穿针固定于六轴空间支架的上下环上,在六轴空间支架的连杆上安装单向力传感器,测量连杆上的受力情况。在实验台的上部安装了FESTO DSBC-40-50 气缸,气缸活塞杆处安装了拉压传感器,实时输出气缸轴向压力的大小。安装过程中应保证研究对象的居中性和竖直性,减少不必要的误差。图7 为六轴空间支架系统安装示意图。

图7 六轴空间支架系统安装示意图
PDMS 方便制作成不同弹性模量,有良好的稳定性[20-21],可以较好地模拟断骨处愈伤组织。制作5 个弹性模量不同的PDMS,来替代随着骨折不断愈合逐渐变硬的愈伤组织。5 个PDMS 根据其弹性模量大小排序,其中弹性模量最大的为1 号PDMS,最小的为5 号PDMS。其弹性模量经过测量依次为3.01 MPa、2.03 MPa、1.46 MPa、1.05 MPa、0.51 MPa。
参考人在康复训练期间腿部的受力大小[22],通过调节电磁阀控制气缸压强,使气缸输出0~500 N的轴向压力,通过气缸处的传感器、三向力传感器和6 个连杆单向力传感器实时测量气缸输出力、骨折愈合处受到的三向力、6 根连杆上力的大小。一组实验后更换不同弹性模量的PDMS,模拟断骨处愈伤组织和骨痂由软到硬的变化情况。图8 为轴向力加载实验图。

图8 轴向力加载实验图
通过控制电磁比例阀逐渐加大气缸输出气压,增大气缸输出压力,传感器的采样频率为2 Hz,将5 号PDMS 放置在骨折端,每个输出压力下采集200 s以上的数据,分析在每次加载时,各传感器受力变化情况。图9 为200 N 轴向压力下,传感器测量得到的骨折端轴向力随时间变化情况。观察曲线可以发现,当轴向压力加载至200 N 瞬间,骨折端受到的轴向压力约为71.4 N,随后逐渐减小,80 s 后压力值逐渐稳定,约为70.4 N。选取不同弹性模量的PDMS愈伤组织替代物,在不同的轴向压力下重复上述实验,发现均在约100 s 后达到相对稳定状态。因此,为了避免受压材料力学特性导致的误差,设置本实验在每组轴向压力下的采样时间为200 s,取传感器后20 s 测得数据的平均值作为该轴向压力下传感器的读数。

图9 六轴空间支架各连杆以及骨折端受力变化
将通过传感器得到各连杆所受力、气缸输出力以及各连杆的长度数据代入第1 节推导的骨折端轴向力计算方法,得到骨折端轴向力的计算值Fmid。根据式(4)计算误差率ρ,根据式(5)计算骨折端的轴向载荷分担比η。
图10 为5 号PDMS 在不同施加压力下,骨折端轴向力、轴向载荷分担比η以及轴向力计算误差率ρ的变化图。随着施加压力的增加,误差率逐渐降低,骨折端轴向载荷分担比逐渐增大。在施加压力较小时,误差率降低较为明显,轴向载荷分担比也存在一定波动。这是由于初期施加力较小,各部件间存在间隙,且传感器在读数较小时可能存在的零位误差,导致施加力较小时理论公式的误差相对较大,这也导致在施加压力较小时其骨折端轴向载荷分担比有相对较大的波动。随着施加压力增大,各杆件间结合都较紧密,误差率降低,且误差率波动也减小。同时随着施加压力的增大,PDMS 被压缩,其弹性模量增大[23],轴向载荷分担比也因此增大。

图10 5 号PDMS 实验数据分析图
一组实验后将骨折端的PDMS 取出,换上弹性模量不同的PDMS 重复上述实验过程,得到骨折端轴向力计算值,计算其误差率ρ以及骨折端力轴向载荷分担比η。
如图11 所示,不同的PDMS 在相同的施加压力下的骨折端力计算值误差率不同,但误差率都随着施加压力的增加略微减小,在施压压力较小时变化较大,除了弹性模量最小的5 号PDMS 模型之外,当施加压力增大至100 N 以后变化区域平缓;明显看出在相同施加压力下,PDMS 的弹性模量越大,其误差率越小,这是由于PDMS 弹性模量越大,连杆所受压力越小,连杆上由于力方向不完全沿着轴向所带来的误差越小,并且在PDMS 弹性模量较大时,骨骼的轴向位移较小,因此外固定架的位移也较小,导致误差减小。这也与第2 节ANSYS 的仿真结果相印证。即使是误差率最大的5 号PDMS,在较大的施加压力下,其误差率在10%左右,随着PDMS 的弹性模量增加,其误差率逐渐降低至2%以内,该误差值是骨科医生可以接受的,低于基于坐标变换理论分析Ilizarov 骨外固定架矫形力[24]的误差水平。

图11 5 种PDMS 在不同施加压力下误差率的变化情况
如图12 所示,不同PDMS 骨折端轴向载荷分担比不同,且随着施加压力的增大其轴向载荷分担比也略微增大。其中弹性模量最小的5 号PDMS 随着施加压力的增加,其轴向载荷分担比增大的幅度较明显,这是由于弹性模量较小的PDMS 在受到上端骨骼施加的轴向压力时,会产生较大的形变,导致其弹性模量有所增加;而其余弹性模量较大的PDMS形变量较小,因此轴向载荷分担比变化不明显。这也与ANSYS Workbench 仿真情况相符合,骨折端愈伤组织弹性模量越大,其骨折端受力的轴向载荷分担比越大,因此通过计算骨折端轴向载荷分担比判断骨折的恢复程度是可行的。

图12 5 种PDMS 在不同施加压力下轴向载荷分担比的变化情况
4 结论
针对目前骨折愈合过程中医生难以获得骨折端受力情况并判断骨愈合程度的问题,提出了基于六轴空间支架的骨折端力学环境测量方法。通过仿真的方法以及六轴空间支架的轴向加载力学实验,验证了该测量方法在仿真环境与实验室环境下的数据一致性。实验结果表明,通过该方法可以准确地得到骨折端的受力情况,并以此帮助判断骨折愈合程度。
目前该项目正在与医院开展合作研究,针对该方法进行定性研究。未来的研究工作可以根据该项研究成果,申请临床或动物实验。实时测量到患者骨折端的受力情况,根据该数据指导患者康复训练,判断骨折愈合情况和拆除矫形支架的最佳时期。
