石墨烯增强复合材料悬臂板的气动颤振分析及振动抑制研究*
2022-08-24韩若凡陈杰张伟
韩若凡 陈杰 张伟
(北京工业大学机电学院,北京 100124)
引言
气动弹性现象是指:飞行器作为弹性体在气动载荷的作用下将产生振动,同时结构的振动将改变流场的分布,从而影响气动载荷的大小,这种现象将一直持续下去,直到飞行器达到平衡或者发散的状态[1].各种气动弹性力学现象都是由弹性力、惯性力和气动力三者之间的相互作用引起的.颤振是一种气动不稳定现象,是典型的气动弹性问题,大振幅的颤振将影响飞行器结构的飞行安全性,是飞行器设计人员最为关注的问题之一.
薄板结构被广泛应用于飞行器当中,当飞行器的飞行速度逐渐增大时,由于结构不断从气流中吸取能量,振动幅度会随速度的增大而增大.当飞行器的速度超过颤振临界速度时,从气流中吸取的能量大于结构阻尼所引起的能量消耗,系统就会从稳定状态变成发散状态,结构在某一瞬时就会发生灾难性的破坏[2].为了提高飞行器的安全系数,对颤振问题和颤振主动抑制的研究是十分有意义的.
国内外学者对颤振以及对颤振现象的抑制,做了许多相关研究.Prakash 和 Ganapathi[3]用有限元程序研究了热环境对功能梯度材料制成的平板的超音速颤动行为的影响.通过计算复杂特征值问题的解决方案,发现热梯度会降低临界颤振速度.Chen[4]分析了正交各项异性复合层压矩形板在空气动力压力和横向激励作用下的颤振和非线性动力学.通过对特征值问题的求解,研究了复合材料层合板颤振发生的临界马赫数.基于非线性方程,分析了极限环振荡与临界马赫数之间的关系.Moon和Hwang[5]提出了一种最佳控制设计来控制带有压电致动器的超音速复合板的颤动,以较低的控制输入即可获得较高的最大可抑制动压力.Reddy[6]设计了一种自适应输出反馈控制器,通过使用前缘和后缘控制面驱动来抑制非线性机翼截面上的气动弹性振动.Oh和Li[7]开发了用于圆柱压电叠层壳的空气热弹性分析的几何非线性有限元.结果表明主动压电致动可以有效地增加空气动力学临界压力.Li[8]研究了使用压电材料的超音速梁的主动气动弹性颤振特性,结果表明表面加入压电材料,可以显著改善梁的气动性能.Peng等[9]应用负速度反馈控制算法,分析了具有分布式压电传感器和主动振动控制执行器的复合材料层合板的振动抑制.
石墨烯或石墨烯薄片(GPL)是一种碳填充的聚合物复合材料,具有极高的机械、电和热特性,并能降低生产成本.此外,理论和实验上的研究已经证明,向原始聚合物基质中添加少量GPLs可以显著改善其机械性能[10-14]、热性能[15,16]和电性能[16].Fang等[17]制备的聚苯乙烯片材纳米复合材料掺入了0.9%质量分数的GPL片材,这使得杨氏模量显著提高了57.2%.King[18]等通过添加6%质量分数的GPLs,制备了GPLs增强复合材料,并通过实验测试发现纳米复合材料的杨氏模量从2.72GPa提高到3.36GPa.Fan等[19]研究了GPLs增强界面对碳纤维/环氧树脂复合材料的热氧化稳定性的影响.结果表明,层间剪切强度和弯曲强度分别增加了18%和15%.Lin等[20]发现,GPLs增强的聚甲基丙烯酸甲酯复合材料的杨氏模量和剪切模量会随着GPLs质量分数的增加而增加,但随着温度的升高而降低.Wang等[21]研究了不同GPL尺寸对GPL/环氧纳米复合材料力学性能的影响.他们的研究表明,较大的GPL尺寸可以显著提高拉伸模量,但会降低纳米复合材料的强度.Song等[22,23]研究了多层GPL纳米片增强板在轴向压缩和横向载荷下的自由振动、屈曲和强迫振动问题.结果表明将少量GPLs分散到环氧基质中可以显著改善临界屈曲载荷并降低振动响应.
综上所述,学者们从理论、仿真及实验等多个方面对结构的颤振行为以及颤振的控制进行了研究,同时针对GPLs增强复合材料的结构特性也进行了广泛的研究.但目前结合压电反馈控制与GPLs增强材料来对颤振进行抑制的研究还十分有限.GPLs增强材料优异的力学性能为我们抑制颤振提供了新的思路.本文研究了石墨烯增强复合材料悬臂板的主动气动弹性颤振特性以及对颤振的压电抑制.材料参数的计算基于修改后的Halpin-Tsai模型.根据经典板理论和一阶活塞理论,通过Hamilton原理来推导GPLs增强复合材料压电悬臂板的运动方程,分析了GPLs质量分数和GPLs的三种不同分布(X-GPLs,U-GPLs和O-GPLs)对临界颤振气动压力的影响.对基于反馈的主动振动控制进行了数值研究.详细讨论了反馈增益对临界颤振点和临界颤振点附近响应的影响.
1 构建方程
1.1 材料属性的影响
本文假设GPLs的质量分数随着板的厚度方向逐层呈线性变化,如图1所示,文章研究了三种类型的GPLs增强体分布类型,分别为X-GPLs分布,U-GPLs分布和O-GPLs分布.O-GPLs分布表示GPLs含量在中间层最高,在顶层和底层最低;XGPLs分布表示GPLs含量在中间层最低,在顶层和底层最高;U-GPLs分布则表示GPLs增强体在复合材料中均匀分布.

图1 石墨烯分布模型Fig.1 Graphene distribution model


1.2 结构建模
石墨烯增强复合悬臂板结构模型如图2所示,板的顶部和底部为压电层,中间为石墨烯增强复合材料,长、宽和总厚度为a,b,H.石墨烯增强复合材料的厚度为h.根据位移-应变方程,板的应变表示如下:

图2 结构示意图Fig.2 Schematic of the structure


2 自由振动
石墨烯增强复合材料悬臂板模型的具体尺寸和材料参数如下:

可以通过Rayleigh-Ritz得到结构的固有频率和振型.悬臂板的模态函数可以表示为:

将式(18-20)带入到式(17),令H=h,通过特征值求解得到GPLs质量分数为0.3%时的固有频率,与有限元方法得到的固有频率对比如表1所示.结果表明本文所得到的结果和通过有限元方法所得到的结果相近,验证了本文方法的有效性.

表1 与有限元方法固有频率对比Table 1 Natural frequency comparison with finite element method
随着GPLs质量分数的变化,结构的固有频率也会发生改变,固有频率的相对变化率(ωωM/ωM)×100%随着GPLs质量分数的变化率如图3所示,其中ωM为纯环氧树脂基体的固有频率.可以看到:随着GPLs质量分数的增加,石墨烯增强复合材料悬臂板的固有频率相对变化率总是大于零,这说明GPLs的加入使得结构的固有频率提高.更高的固有频率,体现了GPLs对结构的刚化作用,有利于提高结构的气动稳定性.并且X-GPLs分布对固有频率的提高效果大于U-GPLs分布和O-GPLs分布.图4为模型的前六阶振型.

图3 固有频率随石墨烯质量分数的相对变化率Fig.3 Relative change rate of natural frequency with graphene mass fraction

图4 悬臂板前六阶振型Fig.4 The first six mode shapes of the cantilever plate
3 颤振分析


4 数值模拟
λ的实部和虚部随着无量纲气动力β的变化如图5所示.在无量纲气动力β=33.706时,图5(a)中特征值的实部由负变正,同时图5(b)中特征值虚部此时会发生汇合,此时的βi称作无量纲临界颤振气动压力,意味着颤振现象的发生.图6为颤振发生前后板的响应,可以看到颤振发生后,响应开始发散,逐渐趋于无穷.

图5 特征值随无量纲气动力的变化Fig.5 Variations of the eigenvalue with respect to the dimensionless aerodynamic pressure

图6 时域响应对比图Fig.6 Time domain responses:a comparison
通常可以通过提高自身的刚度来提高结构的气动稳定,结构的临界颤振气动压力随着GPLs增强体质量分数增加的变化如图7所示,随着GPLs增强体质量分数的增加,结构的临界颤振气动压力随之增加,X-GPLs分布相比U-GPLs分布和OGPLs分布能更好地提高结构的气动稳定性.
下面GPLs增强体取O-GPLs分布,质量分数为0.3%来研究反馈控制对颤振现象的抑制效果.
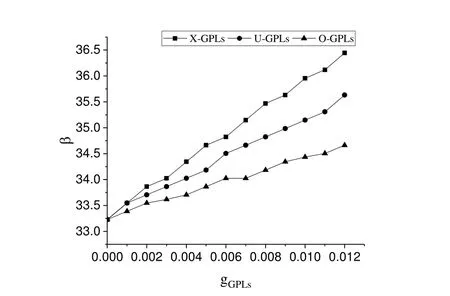
图7 临界无量纲颤振气动压力随石墨烯质量分数的变化Fig.7 Variations of critical dimensionless flutter aerodynamic pressure with respect to graphene mass fraction
图8和图9分别展示了三组不同的加速度反馈增益下的加速度反馈控制,对结构临界颤振气动压力的影响.可以发现随着Ka增加,结构的临界颤振气动压力也随着增加,这表明在一定范围内,更高的加速度反馈增益可以提供更好的颤振抑制效果.图9表示三组不同的位移反馈增益下的位移反馈控制对结构临界颤振气动压力的影响.同样可以发现随着Kd增加,结构的临界颤振气动压力也随着增加,这说明在一定范围内,位移反馈增益越高,对颤振抑制效果也越好.因此,两种反馈控制都可以有效地增加结构的临界颤振气动压力,从而提高结构的气动特性.

图8 不同加速度反馈增益下,特征值随无量纲气动力的变化Fig.8 Variations of eigenvalues with respect to dimensionless aerody⁃namic force under different acceleration feedback gains

图9 不同位移反馈增益下,特征值随无量纲气动力的变化Fig.9 Variations of eigenvalues with respect to dimensionless aerodynamic force under different displacement feedback gains
图10和图11分别展示了加速度反馈控制和位移反馈控制,在控制前后结构的位移响应对比及相对的反馈控制电压,可以看到控制后的位移响应不再发散,幅值逐渐衰减.

图10 加速度反馈控制效果Fig.10 Control effect of acceleration feedback

图11 位移反馈控制效果Fig.11 Control effect of displacement feedback
5 结论
本文主要研究了石墨烯增强复合材料悬臂板的颤振特性及颤振的压电抑制,利用Halpin-Tsai模型及混合率计算了石墨烯增强复合材料板的等效材料参数,通过Rayleigh-Ritz法得到了石墨烯增强复合材料悬臂板的固有频率,并与有限元仿真进行了对比.研究了石墨烯增强复合材料悬臂板的固有频率和无量纲临界颤振气动压力,随不同分布下GPLs增强体质量分数的变化情况.研究了利用压电层进行加速度反馈控制和位移反馈控制对结构气动稳定性的增强作用.结果表明:
(1)不论是X-GPLs分布,U-GPLs分布,还是O-GPLs分布,都使石墨烯增强复合材料板的固有频率提高,其中X-GPLs分布的提高效果要大于UGPLs分布和O-GPLs分布.
(2)添加GPLs增强体就可以使结构的临界颤振气动压力提高.对于石墨烯复合材料增强悬臂板,X-GPLs分布相比于U-GPLs分布和O-GPLs分布可以更好地提升结构刚度及气动稳定性.
(3)不论是加速度反馈,还是位移反馈控制,都可以有效地抑制颤振,使石墨烯增强复合材料悬臂板的临界颤振气动压力增加.
(4)加速度(位移)反馈控制后板的响应相比于控制前的响应,不再发散且振幅快速衰减.
附录A
文中涉及到的矩阵的具体表达形式如下:

