基于多核SVM决策融合模型的海面原油多光谱遥感检测研究
2022-08-16戴渝心姜宗辰王海起
戴渝心, 马 毅, 姜宗辰, 杜 凯, 王海起
基于多核SVM决策融合模型的海面原油多光谱遥感检测研究
戴渝心1, 2, 马 毅2, 3, 姜宗辰4, 杜 凯5, 王海起1
(1. 中国石油大学(华东)海洋与空间信息学院, 山东 青岛 266580; 2. 自然资源部第一海洋研究所, 山东 青岛 266061; 3. 自然资源部海洋遥测技术创新中心, 山东 青岛 266061; 4. 哈尔滨工业大学, 黑龙江 哈尔滨 150001; 5. 山东科技大学, 山东 青岛 266590)
海面溢油事故发生后需要进行精准的溢油检测, 从而为溢油事故现场应急响应与海面污染的快速有效处理提供支持。利用哨兵二号(Sentinel-2)多光谱遥感影像, 基于最佳指数因子(OIF)构建光谱特征指数提取海面溢油光谱特征, 基于灰度共生矩阵(GLCM)提取海面溢油纹理特征, 利用巴氏距离法进行特征选择, 构建海面溢油空谱特征数据集。提出了多核决策融合支持向量机(SVM)海面原油检测模型, 对黄海4.27“交响乐号”油轮溢油事故开展检测研究。实验结果表明, 在复杂水色背景下, 经过筛选的最佳空谱特征数据集检测结果的总体精度可以达到89.25%, Kappa系数为0.854,1分数可达0.889; 多核SVM决策融合后的总体精度可以达到90.26%, Kappa系数为0.866,1可达0.898, 总体精度较单核提高了1.0%~8.2%, Kappa系数提高了0.013~0.122,1分数提高了0.009~0.097。实验结果表明, 海面溢油检测模型具有较高的溢油检测精度和模型鲁棒性, 适用于海面溢油检测研究。
遥感; 溢油检测; 特征提取; 支持向量机; 决策融合
随着海洋运输业的发展, 溢油事故频繁发生。油品在海洋中扩散会对生态环境、经济建设、海洋工业、沿岸居民生活等方面造成损失与危害。无论是自然因素还是人为原因引起的溢油事故, 绝大部分都具有突发性和动态性, 给相关部门分析事件性质、部署应急措施带来困难, 遥感技术对此可发挥重要作用。任广波等[1]利用无人机高光谱构建海上溢油检测模型, 得出溢油检测的有效特征波段。除了无人机平台, 目前在溢油检测中Landsat、MODIS和Sentinel-2等卫星遥感平台也有较大贡献[2-7]。杜凯等[8]利用Landsat7 ETM+多光谱影像数据, 基于卷积神经网络模型对太阳耀斑区溢油进行检测, 得到较高精度。Srivastava等[9]利用MODIS卫星数据, 实验得出有利于溢油检测的光谱波段与波段比值。Rajendran等[10]基于不同时期的Sentinel数据进行溢油检测, 分析溢油扩散, 证明了Sentinel传感器在溢油检测方面的良好性能。
支持向量机(support vector machine, SVM)在遥感图像研究中显示出了良好的计算性能, 仅需少量样本即可对目标进行高精度检测。Chaudhary等[11]使用SVM模型对雷达溢油数据进行精确检测, 得出较好的水油分离结果。范剑超等[12]提取溢油局部化非负特征, 以SVM为模型, 利用小样本对“深水地平线”事故的HJ-1星数据进行分类, 得到较高的准确率。SVM核函数与其他参数的选择会影响检测效果, 而传统的单核SVM需要根据研究目标的特性设定核函数, 具有局限性。谭琨等[13]利用不同核函数的SVM对遥感图像进行分类, 实验结果表明径向基核函数的分类精度最高。不同的核函数侧重于不同的特征空间, 从而计算出不同的超平面, 得到多种检测结果, 在一定的方法下不同的核函数能够优势互补, 达到提高精度的目的。
2021年4月27日, 装载大量原油的“交响乐”号油轮在黄海朝连岛东南海域港口外停泊时遭到进港货轮撞击, 导致船体破裂, 大量原油流入海域, 对海洋和大气环境造成严重影响。以黄海2021年“交响乐号”油轮溢油事故(简称4.27“交响乐号”溢油事故)为研究对象, 筛选出最佳溢油空谱特征数据集, 以单核SVM为分类模型对研究区进行溢油检测, 最后基于决策融合算法实现海面溢油检测结果的多核融合, 更加全面地考虑目标特征, 提高分类精度。
1 研究区与数据
1.1 研究区
以2021年4月27日发生在黄海海域的两外籍货轮相撞事故为研究对象。该溢油事故具体发生在黄海朝连岛东南海域(图1), 由于巴拿马籍杂货船“义海”轮(SEA JUSTICE)与利比里亚籍锚泊油船“交响乐”轮(A SYMPHONY)相撞造成海面溢油。本文对2021年5月18日该事故造成的溢油进行检测, 所选研究区大小为3 400×3 400像素, 处于当日海面油膜密集区域。
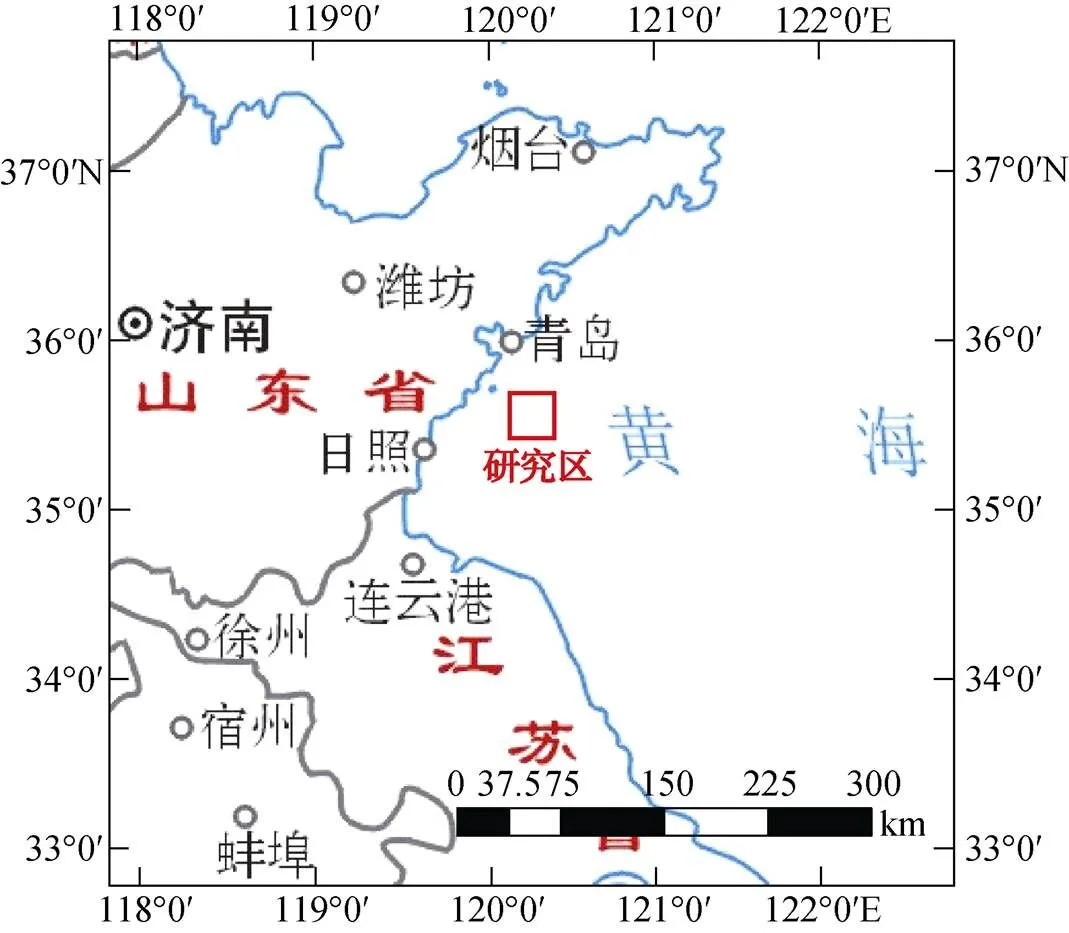
图1 研究区位置图[审图号: GS(2019)1819号]
1.2 数据
本文所使用的数据为Sentinel-2卫星 MSI传感器的多光谱遥感影像数据。Sentinel-2是欧洲航天局发射的高分辨率多光谱成像卫星, 目前共有2A和2B两颗卫星, 覆盖13个光谱波段, 地面分辨率最高可达10 m。基于Sentinel-2于2021年5月18日对研究区拍摄的L1C级产品, 对其中6个适用于溢油检测的波段数据进行大气校正、重采样和反射率归一化等预处理。Sentinel-2各波段参数见表1。
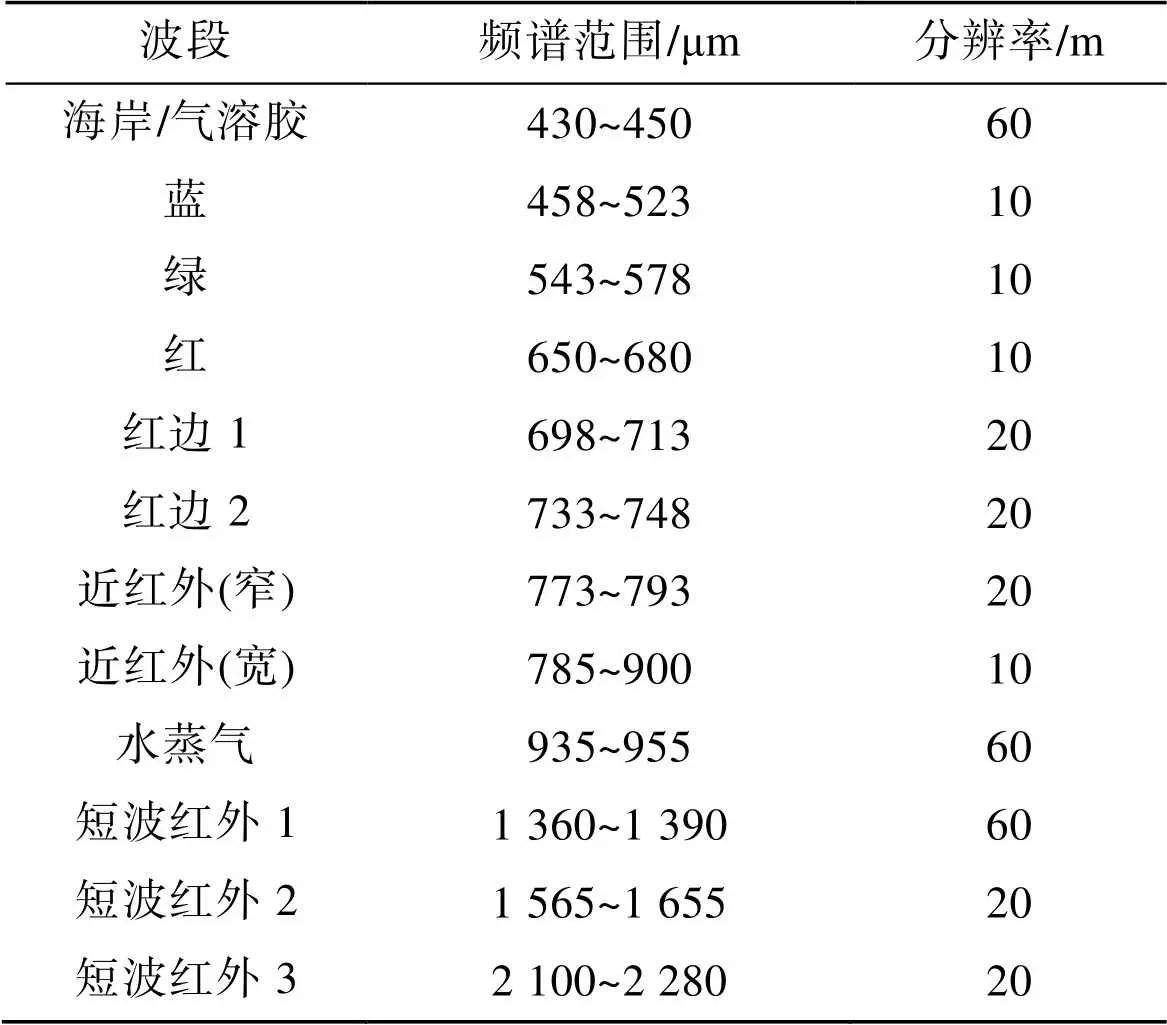
表1 Sentinel-2波段数据参数
海面油膜与清洁海水的反射率和辐射亮温在可见光以及近红外波段具有差异性[14]。乳化油在近红外和短波红外的反射率高于海水, 油包水型乳化油在约1 610 nm处的短波红外波段反射率高于水包油型乳化油, 而在可见光波段其反射率较低, 呈暗色调[5]。所以本文选择Sentinel-2的蓝、绿、红、近红外(宽)、短波红外2和短波红外3这6个波段进行光谱分析, 分别用B1—B6表示。图2为研究区的真彩色合成影像, 红、绿、蓝三个通道分别对应664.5 nm、560 nm和496.6 nm。
对归一化的Sentinel-2多光谱遥感影像数据进行光谱指数计算和归一化指数计算, 扩充光谱特征数据, 以获取更有利于区分油-水特征的光谱信息。除光谱特征外, 还对研究区的纹理特征进行了分析。
如表2所示, 共选取训练样本16 325个像素, 测试样本152 837个像素, 比例约为1︰9, 包含油膜与海水两个类别。样本数据的空间分布如图3所示。
对训练样本进行光谱采样, 取各波段溢油与海水采样点平均值, 生成反射率光谱曲线。从图4中可以看出, 油膜的反射率整体高于背景海水, 这是由于研究区溢油发生乳化导致的, 乳化油的反射与散射较强, 并且太阳耀斑也会对油膜和海水的明暗变化产生影响。
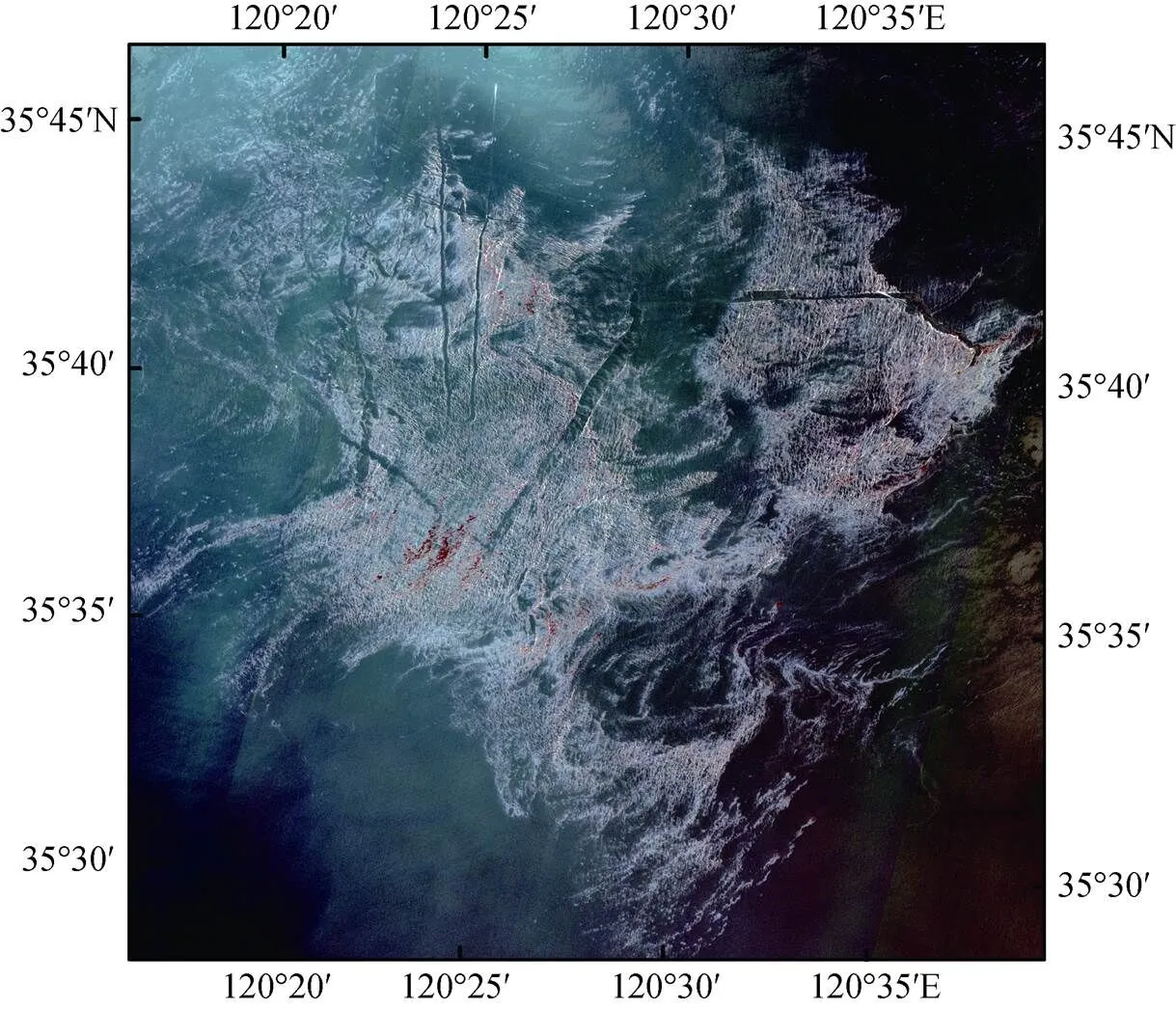
图2 研究区真彩色影像
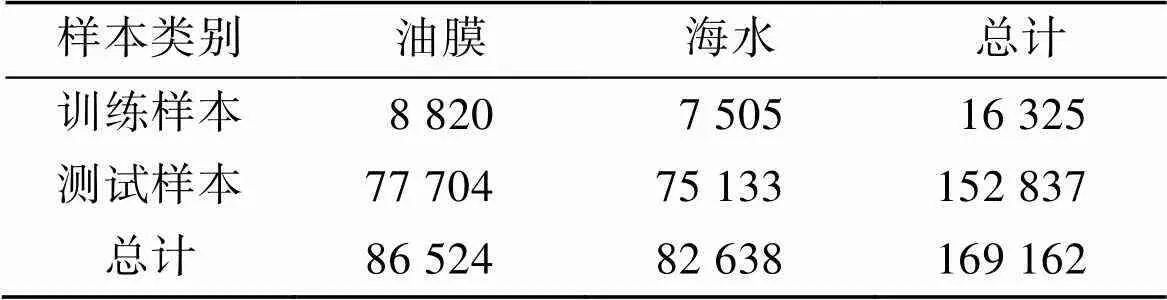
表2 训练与测试数据样本像素数量
2 模型与方法
2.1 特征选择
研究区水色背景略为复杂, 单一光谱波段难以准确表示溢油特征, 多波段组合可以得到更多的油-水信息, 所以对所选的6个光谱波段进行指数计算, 补充更能表征溢油的光谱特征数据。OIF最佳指数法综合考虑了单一波段与多波段数据之间的相关性, 可用于选择遥感数据中的最佳波段组合, 公式如下:

图3 训练与测试数据空间分布
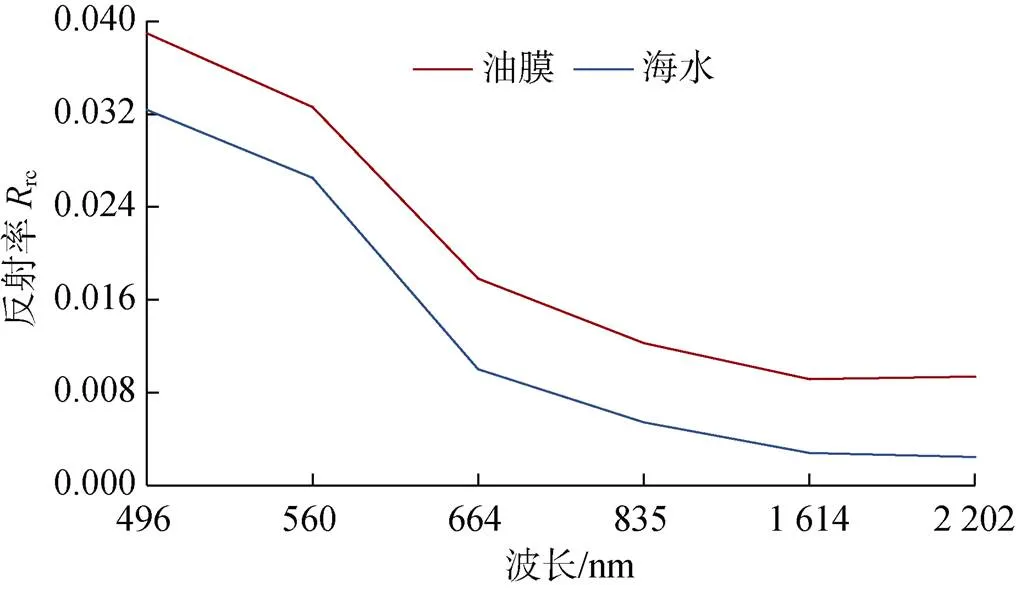
图4 油膜与海水光谱
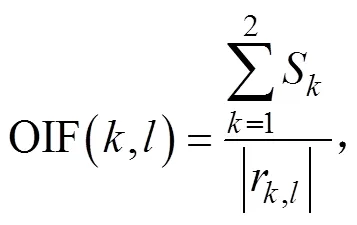
式中,S表示第波段的标准差, r表示波段和波段的相关系数。标准差越大, 相关系数越小, 随之OIF指数越大, 波段组合所包含的信息量越多。对OIF最高的4组波段进行组合, 生成油-水光谱差异性更强的光谱特征, 最终共得到单一光谱波段和指数组合光谱特征14个。
除光谱特征外, 还引入了研究区的纹理信息实现溢油检测分析。首先对Sentinel-2遥感数据进行主成分分析, 提取出第一主成分用于获取纹理特征, 降低数据维数, 减少噪声干扰。基于灰度共生矩阵(gray-level co-occurrence matrix, GLCM)分别在8个方向上得到第一主成分的8个特征(均值、方差、协同性、对比度、相异性、熵、角二阶矩和相关性), 并对每个特征的8个方向取平均值。窗口大小决定了纹理的真实性和计算速度, 所以采取窗口大小为3×3和5×5的两组计算, 共得到16个纹理特征用于构建最佳空谱特征数据集。
将所得光谱特征数据与空间纹理数据相结合, 构建对溢油检测更加有效的空谱特征数据集。然而并非特征越多越有利于模型检测, 特征冗余不仅会造成过大的计算量, 降低计算效率, 而且易造成模型过拟合, 影响检测精度。计算每个特征的油-水巴氏距离, 筛选出最佳空谱特征。巴氏距离(bhattacharyya distance,B)在分类中被用来评估类间可分离性, 其公式如下:
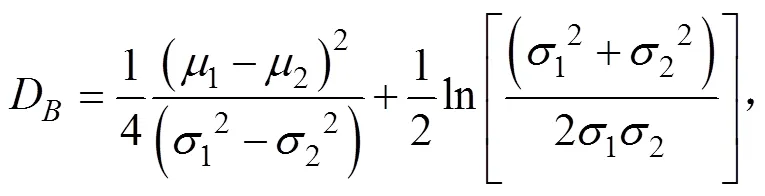
式中,μ表示第类样本的均值,σ表示第类样本的标准差。
2.2 海面溢油单核SVM检测模型
支持向量机通过对映射到高维空间的样本进行划分超平面从而实现分类[15]。不同的核函数会生成不同的高维度映射空间, 影响分类结果[16]。利用SVM实现海面溢油检测, 结合4种核函数的分类结果进行后续的多核决策融合, 对比单核与多核的分类结果, 实现更准确有效的溢油检测。
实验中选择了径向基核函数(radial basis function, RBF)、线性核函数(Linear)、多项式核函数(Polynomial)和Sigmoid核函数。RBF核函数以欧氏距离来度量样本间的相似性, 具有平移不变性与计算简单等优势, 可以将数据映射到无限维度。线性核函数参数少, 计算速度快, 更适用于线性可分的数据。多项式l核函数能使线性不可分的数据经过升维变得可分, 但会相应提高计算复杂度。Sigmoid核函数是神经网络中常用的阈值函数, 具有很好的分类能力, 但其应用条件受到一定限制[17]。所选核函数的表达式见表3。
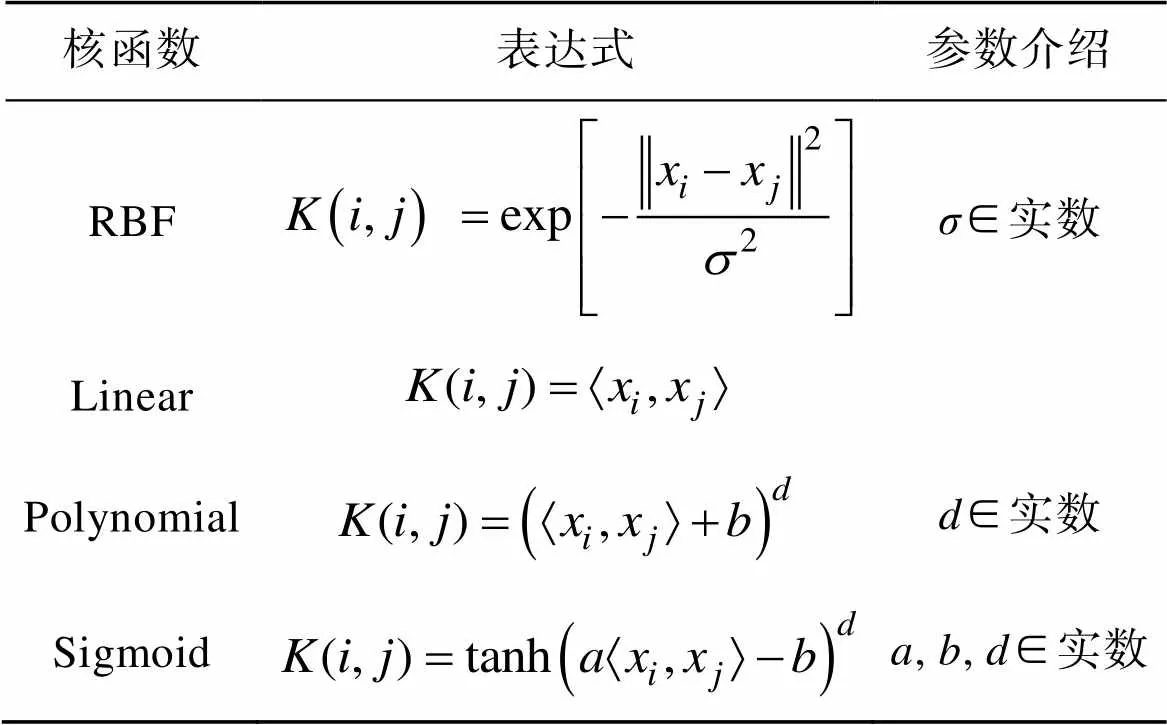
表3 核函数表达式
图5为本文所构建的海面溢油SVM检测模型示意图。首先对得到的研究区光谱与纹理特征进行特征选择, 筛选出最佳溢油空谱特征数据集, 再进行多个单核SVM的溢油检测, 不同核函数通过不同的原理划分超平面, 寻找最大间隔, 得到不同的分类结果, 最终进行决策融合。具体决策融合的算法原理与过程在下一节中详细说明。

图5 海面溢油SVM模型流程图
注: RBM: 径向基核函数; Linear: 线性核函数; Polynomial: 多项式核函数。下同
2.3 多核SVM决策融合模型
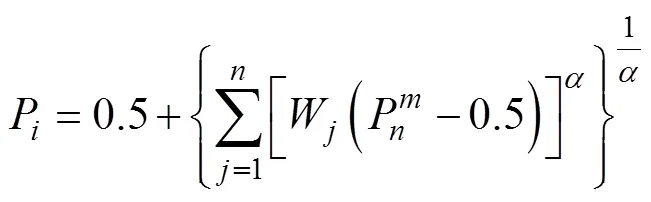
本文的决策融合方法基于模糊隶属度, 逐像元地判定融合后各像元的所属类, 具体决策融合规则如下。对于同一位置的像元, 若该位置所属类在各单核SVM分类结果中相同, 则将这一类别赋予决策融合后的相应位置像元; 若各单核SVM分类结果不同, 则比较该位置像元周围3×3窗口中最多的类别, 若某一单核的类别与其他单核相应3×3窗口中出现次数最多的类别相同, 则将这一类赋予决策融合后的像元; 若不符合上述情况, 则计算该像元在各单核分类结果中属于各类别的隶属度, 通过公式(3)计算得到该位置像元对于各类别的隶属度, 将隶属度高的类别作为最终决策融合的结果。

3 结果与分析
3.1 精度评价指标
本文将总体精度(overall accuracy,O)、Kappa系数和1分数作为精度评价指标, 计算公式如下:
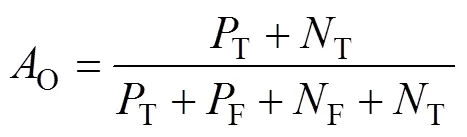

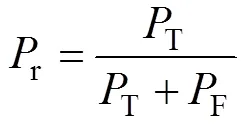
式中,T为标签为油膜且分类结果也为油膜的像素个数,T为标签为海水且分类结果同为海水的像素个数,F为被误分为海水的油膜像素个数,F为被误分为油膜的海水像素个数,r为准确率,e为召回率。
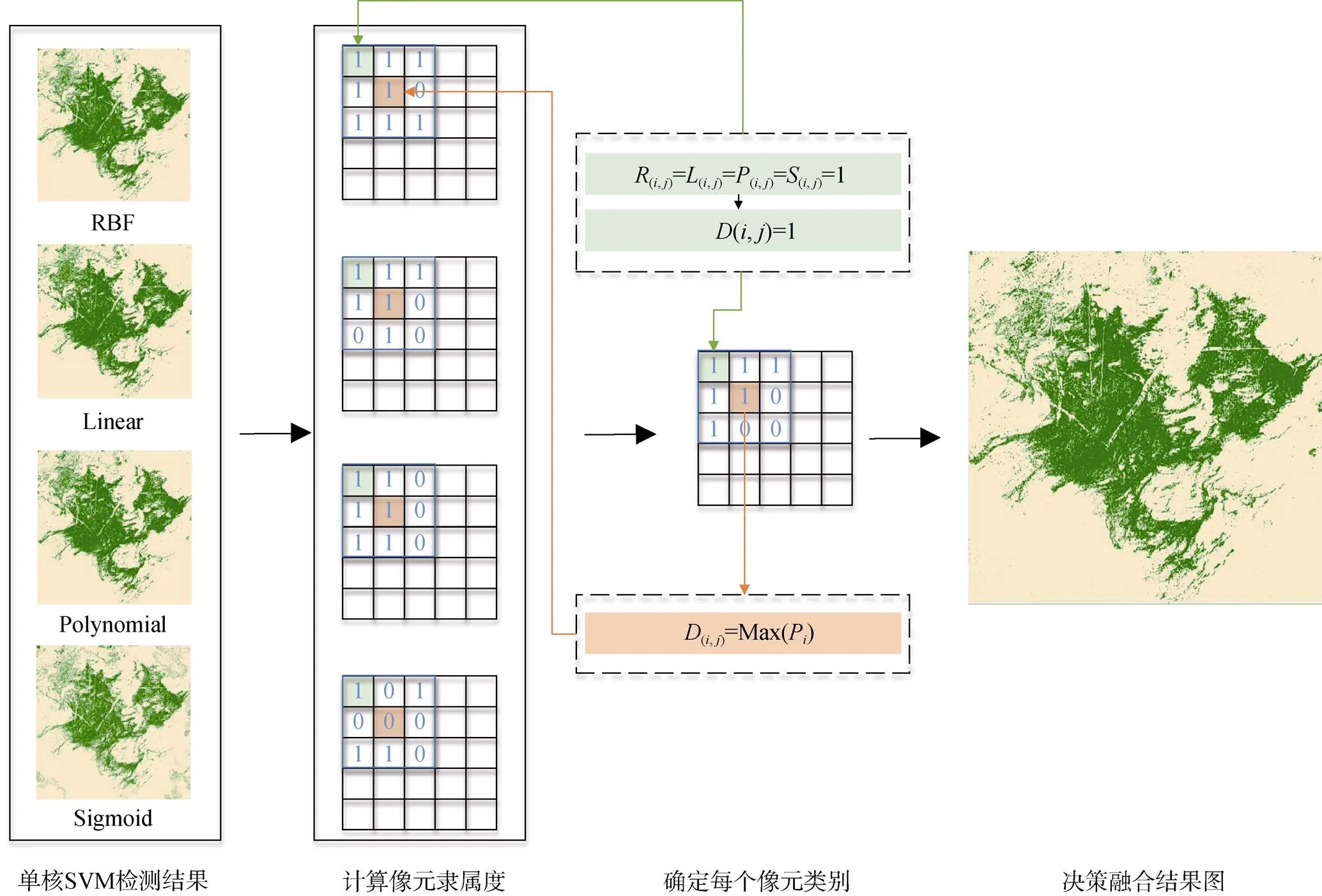
图6 多核SVM决策融合海面溢油检测模型
O是分类正确的像元数与总像元数的比值, 能够评价分类的总体准确率, 但不适用于各类别测试样本数量不均衡的情况, 本文实验中油水样本空间分布均匀、像元数量均衡, 可用O表征分类精度。
Kappa系数可用来判定分类效果, 基于混淆矩阵计算得出, 其值通常在0~1。可以衡量样本数量是否均匀, 越不平衡的混淆矩阵越低, 能利用评价分类精度的可靠性。
1分数是评价二分类模型准确度的指标, 综合考虑了准确率与召回率, 其取值范围在0~1。1分数越大, 模型分类效果越好。
3.2 构建空谱特征数据集与溢油检测分析
3.2.1 光谱与纹理特征的提取
本文首先运用上述方法提取出研究区的光谱特征。本文选择的6个Sentinel-2多光谱遥感数据波段组合的OIF值如表4所示。OIF值越大, 两个波段间的相关性越小, 波段组合后所包含的有效信息越多, 冗余信息越少。选择OIF最大的前4个波段组合, 即B1与B6、B1与B5、B2与B6、B2与B5。
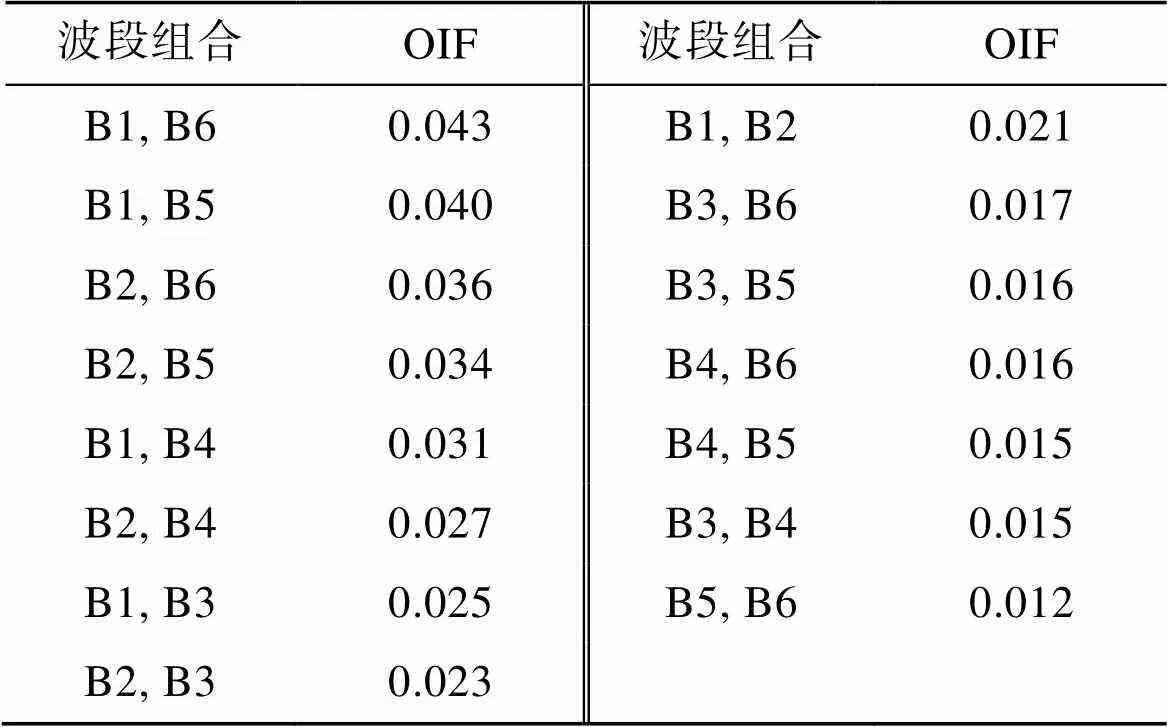
表4 波段组合OIF
对上述所选的波段组合进行比值指数计算和归一化指数计算, 得出新的光谱特征数据。表5为波段组合光谱参数, 其中Bi表示Sentinel-2影像第波段的反射率。最终本文得到6个Sentinel-2单一光谱波段和8个光谱指数, 共14个光谱特征数据用于后续最佳空谱特征数据集的筛选。
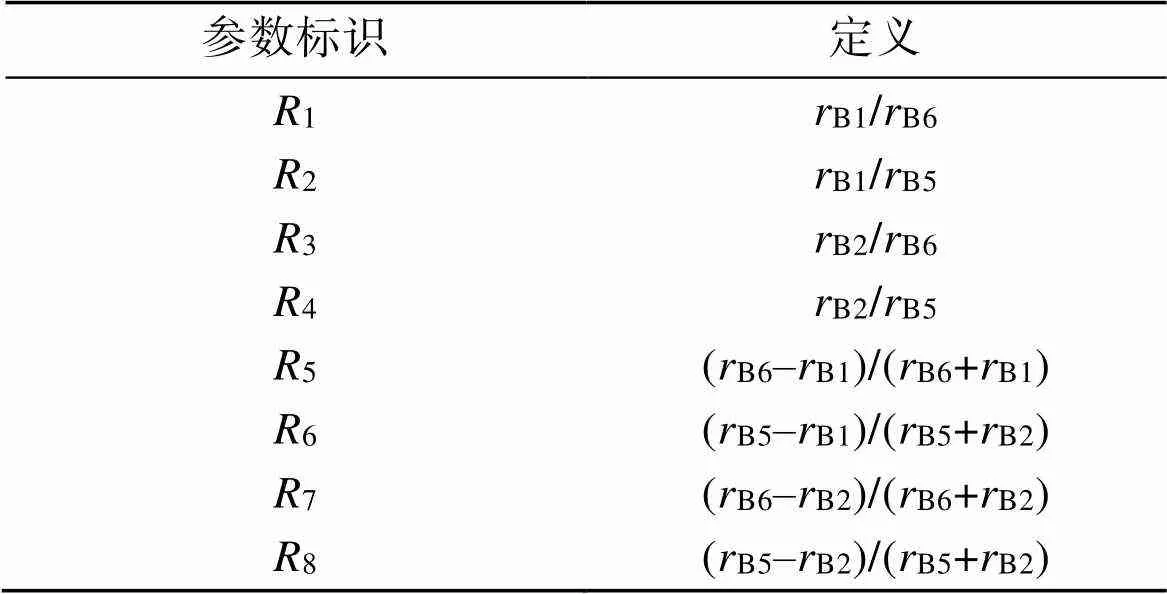
表5 光谱波段组合参数
通过GLCM得到的16个纹理特征在本文中表示为均值(Mean_)、方差(Variance_)、协同性(Homogeneity_)、对比度(Contrast_)、相异性(Dissimilarity_i)、信息熵(Entropy_)、二阶矩(Second Moment_)和相关性(Correlation_), 其中窗口大小为3×3时,为1(例如Mean_1); 窗口大小为5×5时,为2(例如Mean_2)。最终得到用于筛选最佳空谱特征数据集的单波段光谱特征、光谱指数特征和纹理特征共30个。
3.2.2 建立空谱特征数据集
为了使光谱特征与空间纹理特征结合后能最大化发挥各自优势、减少信息冗余与计算量、提高模型检测效率, 引入巴氏距离对备选的光谱特征与纹理特征进行评价, 具体数据如表6所示。
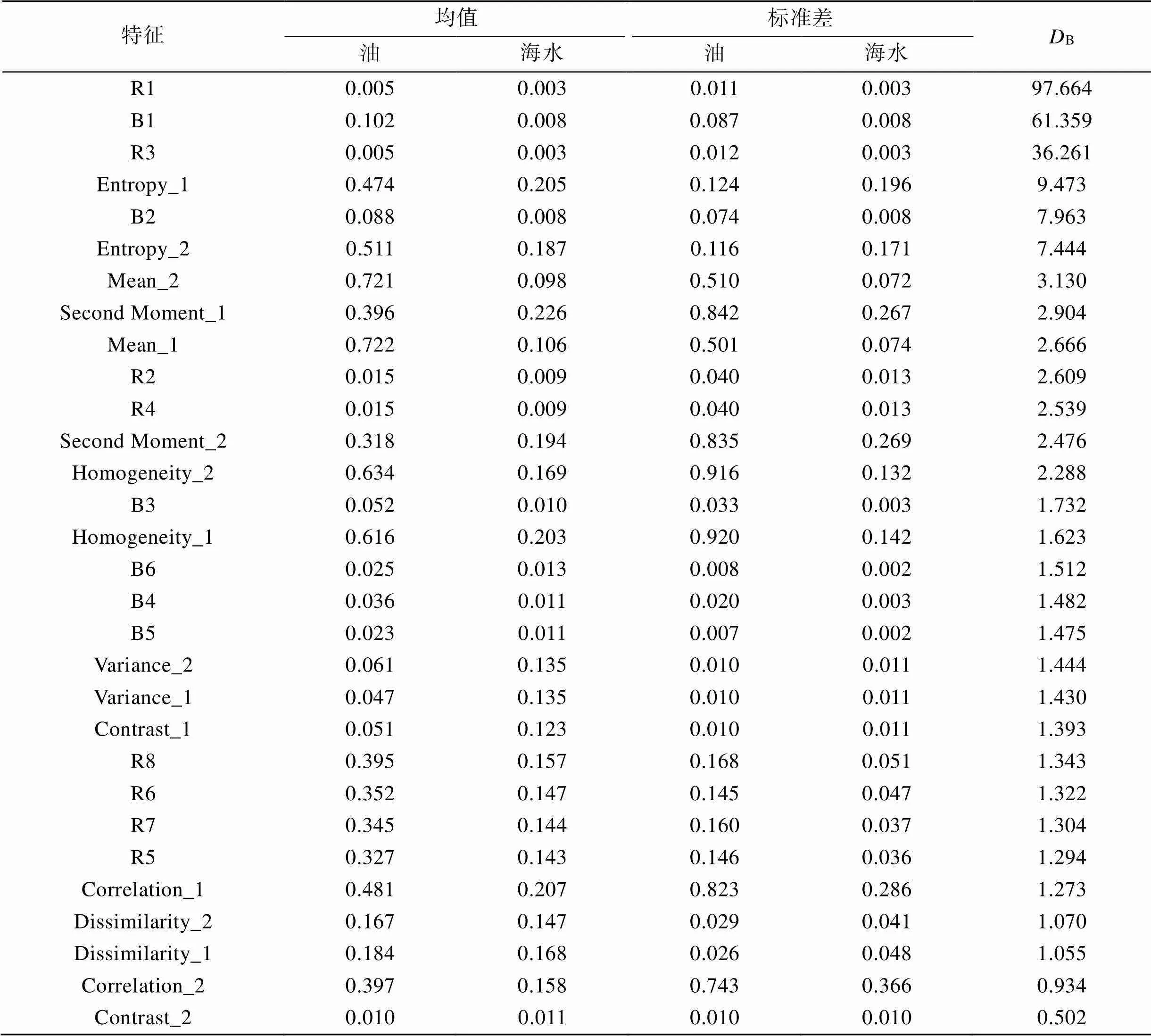
表6 光谱与纹理特征巴氏距离
由表6可以看出R1、B1和R3的B达到了10以上, 明显高于其他特征, 而Correlation_2和Contrast_2的B未达到1, 表示在这2个特征中油水可分性差, 不利于溢油检测。图7是R1、B1、R3和Correlation_2、Contrast_2的特征图, 从目视上可以看出B高的3个特征油水对比明显, 可分度高, 而B较小的2个特征噪声过多, 几乎无法区分出溢油与海水。
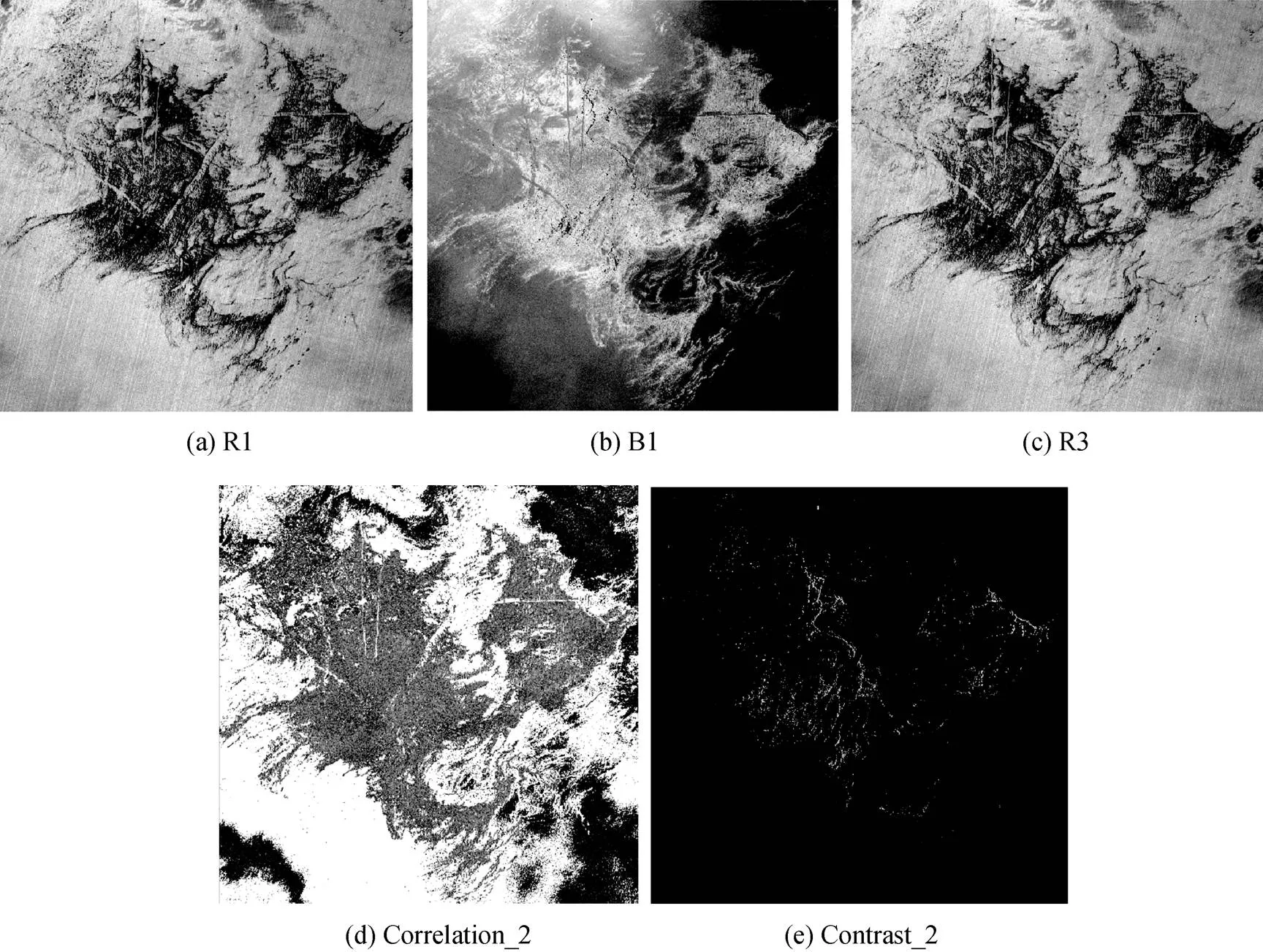
图7 部分光谱纹理特征图
从B1光谱特征图中可以看出, 船只和云雾的亮度与溢油相似, 存在同谱异物现象, 仅从光谱特征训练模型会混淆分类目标。从Correlation_2纹理特征图中可以看出, 由于本研究区溢油与其他噪声的灰度值变化特征相近, 灰度共生矩阵进行纹理提取时会造成不同目标具有相似纹理的情况。所以, 要对光谱与纹理特征进行分析筛选, 以求达到优势互补的作用, 降低同谱异物和相似纹理的影响。此外, 还需对特征数量进行选择, 一味增加特征量会生成冗余噪声信息, 使模型计算效率和分类准确率降低。
为了确定最佳空谱特征数据集的特征数量, 本文开展不同特征量的溢油检测对比试验。按照B从大到小的顺序选择前5、10、15、20和25个特征量进行叠加, 选取总样本的10%用于训练, 90%用于测试, 以RBF为核函数的SVM作为分类模型, 分类结果如图8所示。
从图8(a)能够明显看出特征量为5的分类结果中能够明显看出油水误分严重, 尤其在受海雾与传感器影响的四角处, 检测效果不佳。其他4组不同特征量的分类结果表现较好, 均能清晰区分出溢油形状, 噪声相对较少, 但仍有细微差别, 可在具体的精度评价中体现出。图8(f)为表现最好的20个特征量与精度较差的5个特征量分类结果差异, 能清晰看出特征量为5的检测结果于东北角与西南角分类错误较多, 这是由于特征参量不足, 导致SVM发生过拟合。
表7为5个不同特征量溢油检测的精度评价表, 能够看出特征量个数为20时, OA、Kappa系数和1分数均为最高, 分类效果最理想; 25特征量分类结果的各精度指标与20特征量相差甚小, 也具有很高的准确率和可靠性, 但过多的特征量会造成信息冗余, 甚至易产生过拟合现象, 不利于提高分类准确率; 特征量个数为5时, 3个精度评价指标均为最低, 溢油检测油水混淆严重, 分类效果最差, 与目视判断分类结果图一致。
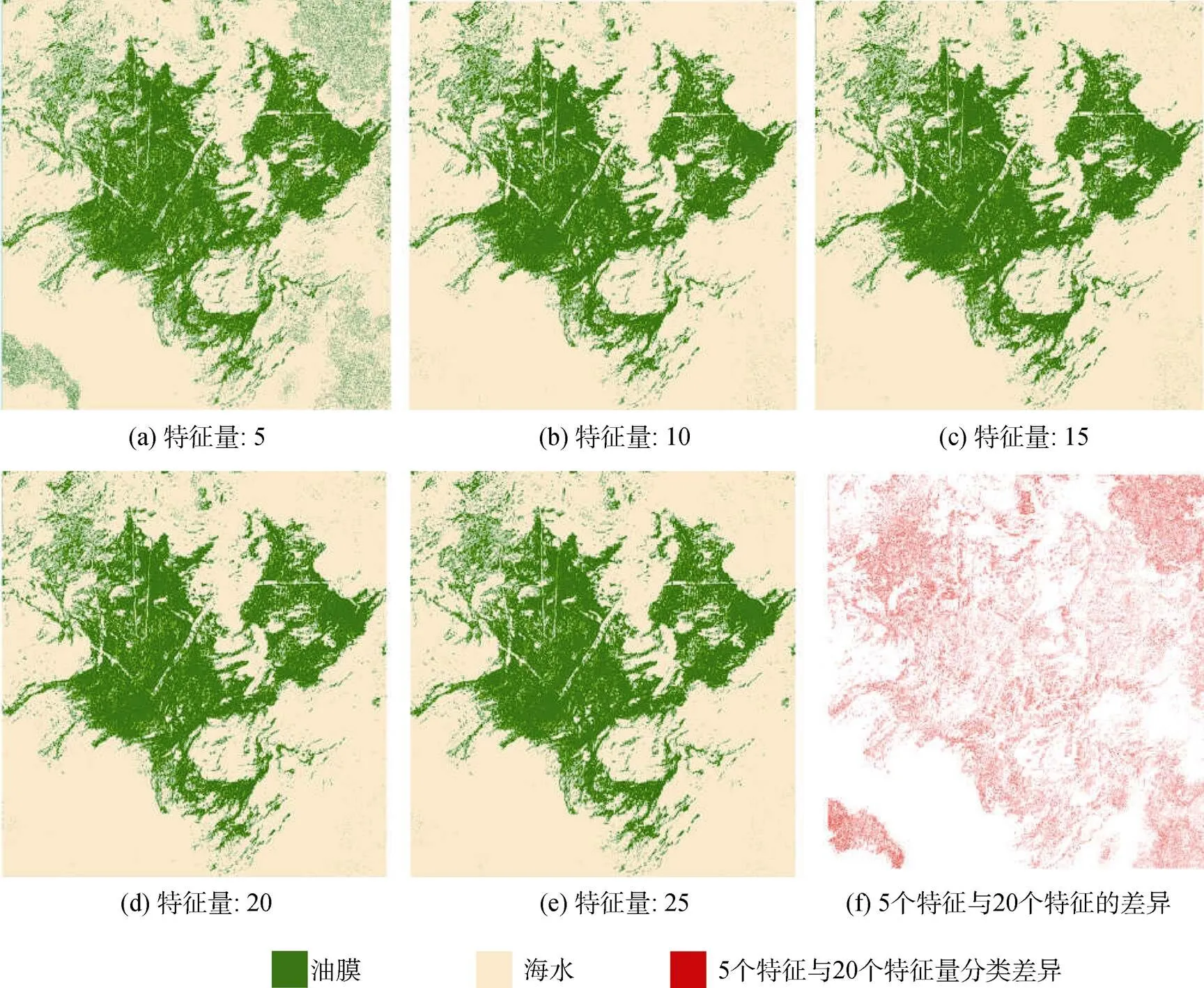
图8 不同特征数量RBF核函数分类结果图
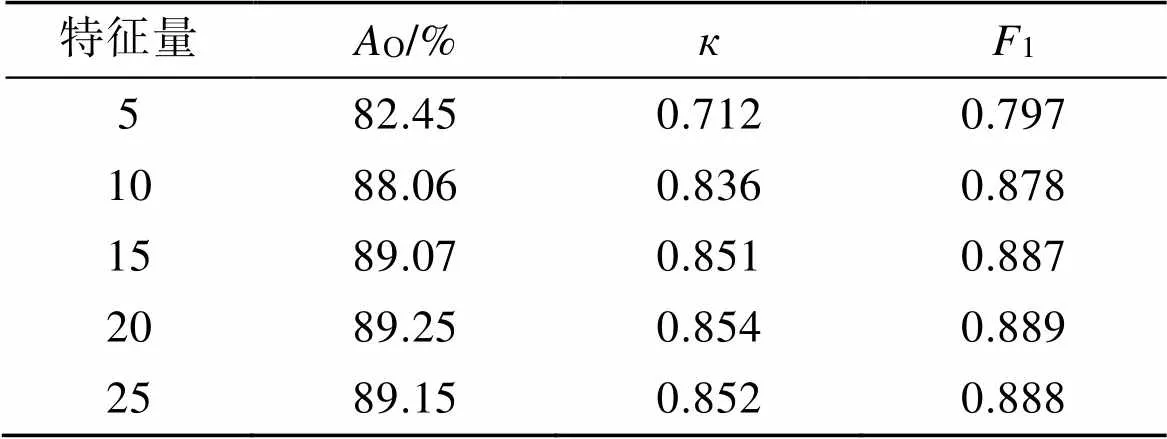
表7 不同特征数量溢油检测的精度表
经过对实验结果的分析, 本文最终选择B从大到小排列的前20个特征量作为最佳溢油空谱特征数据集。
3.3 基于不同特征数据集的溢油检测
为了检验筛选出的最佳空谱特征数据集是否具有溢油检测优势, 对比了不同类型数据集的检测结果。本文选将单波段光谱特征、光谱指数特征和纹理特征分别叠加, 相互组合, 共得到7个涵盖不同类型与特征数量的特征数据集。
依然选择总样本的10%用于训练, 90%用于测试, 以RBF为核函数的SVM作为分类模型, 分类结果如图8所示。可以看出, 图9(c)光谱指数和图9(b)单波段光谱的油水分类造成了大量信息损失, 且在研究区右侧边缘处与左下角存在许多误分现象。单波段+纹理与指数+纹理的分类结果相对较好, 但均左上角在少量海水被错误分类为溢油。相比之下, 指数+纹理、光谱+纹理与单波段+指数+纹理的分类结果更好, 油水对比明显, 噪声更少, 但在许多细节处仍没有本文筛选的最佳空谱特征数据集分类准确, 存在许多细碎的海水区域被误分为溢油。
表8详细列出了不同特征数据集的特征数量与分类精度, 光谱指数与单波段光谱的1较低, 均未到0.8。光谱指数的O最低, 仅为78.07%, 与最佳空谱特征数据集的O相差11.18%, Kappa系数相差0.181,1分数相差0.151, 无论是分类图还是具体的精度数值上光谱指数特征集的分类效果均不佳。虽然单波段+指数的分类结果在分类图中相较单波段光谱特征集与光谱指数特征集有明显变化, 但在精度指标的数值上提高并不多。
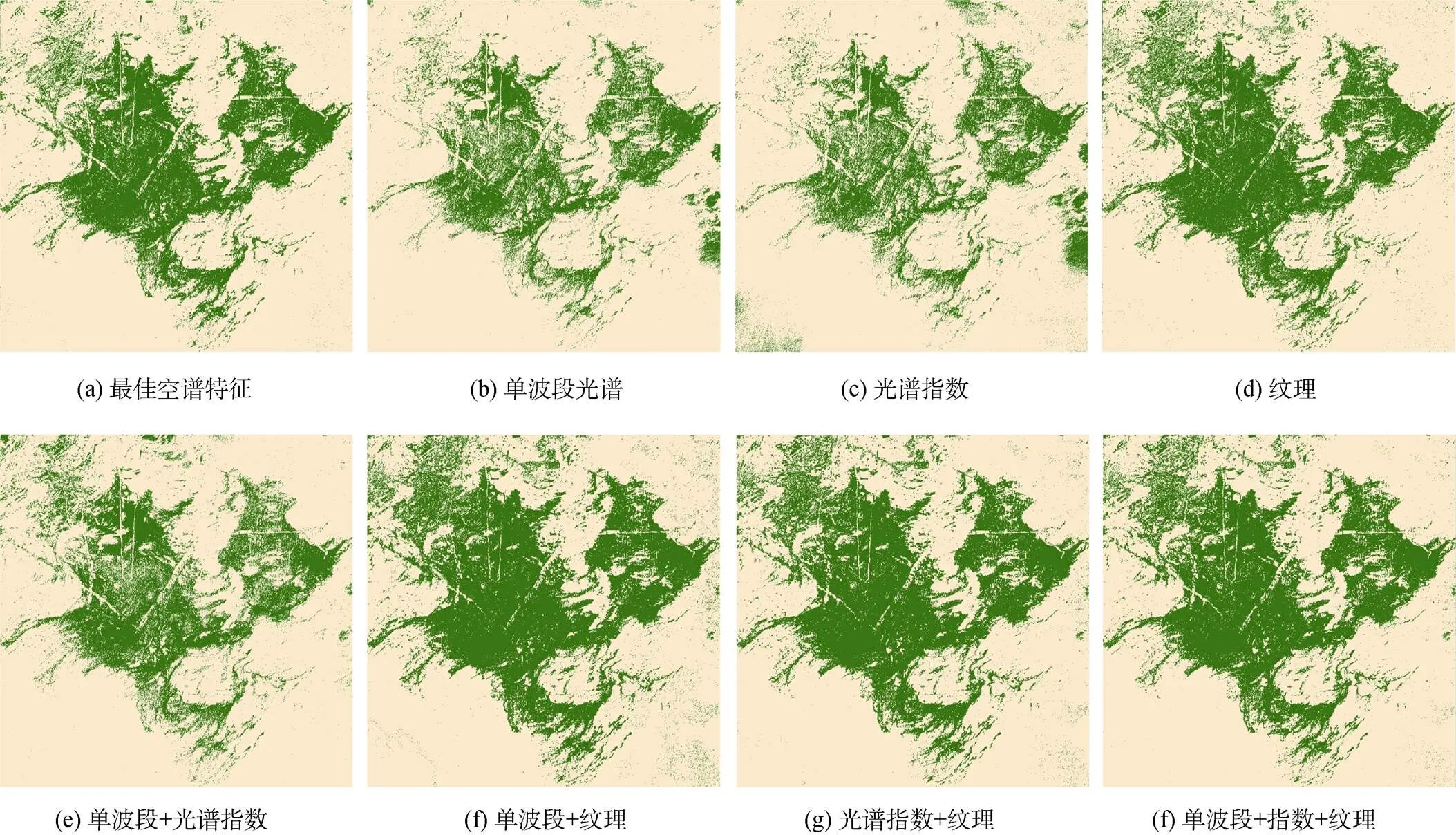
图9 不同特征数据集RBF核函数分类图
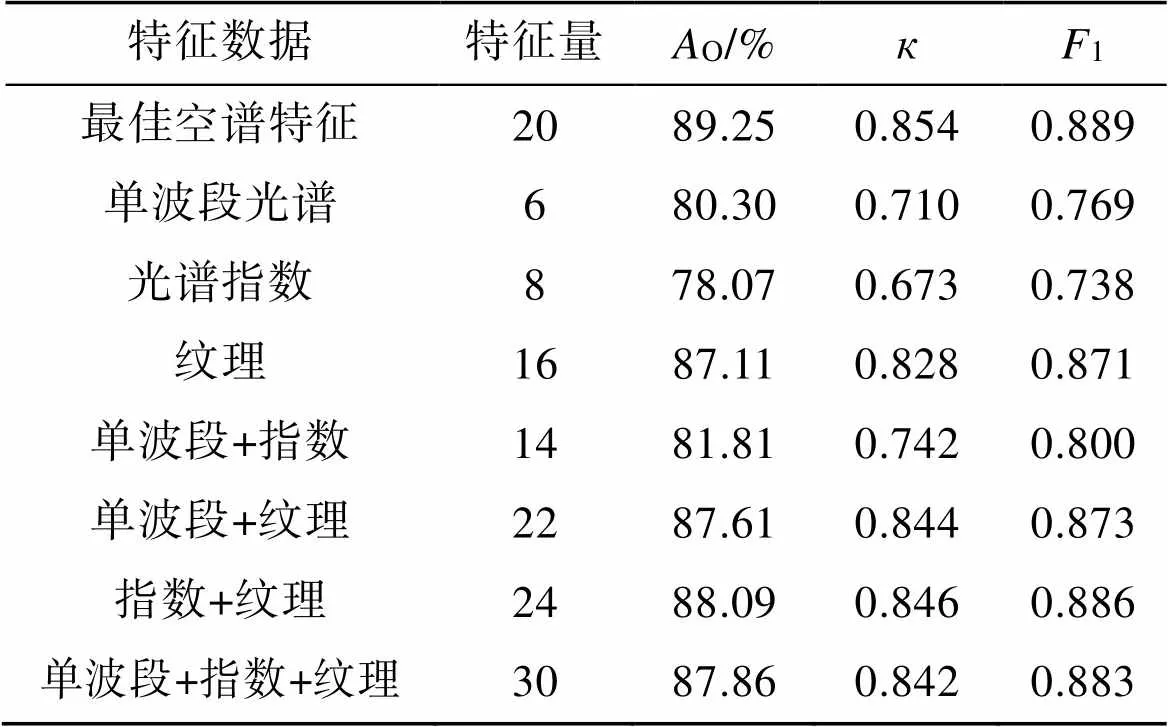
表8 不同特征数据集精度评价表
在作为对比实验的7个特征数据集中, 精度最高的是指数+纹理特征集, 其O达到88.09%, Kappa系数为0.846,1分数为0.886, 但其3个精度评价指标均低于本文筛选出的最佳空谱特征数据集,O相差1.16%, Kappa系数相差0.008,1分数相差0.003。
实验结果表明本文筛选出的最佳空谱特征数据集溢油检测O、Kappa系数和1分数均高于其他特征数据集, 展现出更高的精度与一致性。这也再一次验证了并非特征的数量越多分类效果越好。
3.4 多核SVM决策融合模型与单核模型溢油检测
在确定了本研究的最佳空谱特征数据集后, 将该数据集应用到不同的单核SVM模型中, 引入基于模糊隶属度的决策融合算法实现多核SVM决策融合溢油检测, 单核与多核的分类结果如图10所示。
不同的核函数所得出的分类结果均不一致, 从整体上看, RBF、Linear和Polynomial核函数相差不大, 差别主要在研究区左上与右侧边缘处。Polynomial的碎斑较少, 但对于左上油水分布复杂的区域并没有得到较好的处理。从图11可以看出Sigmoid单核分类结果与多核SVM决策融合后存在很大差异, Sigmoid核函数分类错误较多, 初步分析, 由于训练集中存在混合像元、过拟合现象等因素, 使得Sigmoid核函数没有正确区分出某些纹理特征中易被混淆的像元。
多核SVM决策融合后的图像并没有遗留Sigmoid中错误分类的问题, 克服了RBF的噪声问题, 保留了研究区中央较多溢油区域的分类细节。从表9中单核与多核决策融合的精度数据可以看出: 在单核SVM溢油检测中, RBF、Linear和Polynomial均有很好的分类表现, 其中RBF的O最高, 达到89.25%, 而Polynomial的1分数最高, 达到0.890; Sigmoid的各评价指标均为最低, 与分类图的效果一致。表10为多核SVM决策融合分类结果的混淆矩阵, 测试集油膜与海水样本数量均衡, 总体分类准确率高, 分类错误的情况多为油膜误分为海水。多核决策融合的O、Kappa系数和1分数均高于单核模型,O提高了1.0%~8.2%, Kappa系数提高了0.013~0.122,1分数提高了0.009~0.097。多核决策融合算法将各单核的优势互补, 进一步提高了海面溢油检测的准确性。

图10 单核与多核SVM溢油检测分类结果

图11 Sigmoid与多核决策融合分类结果差异图
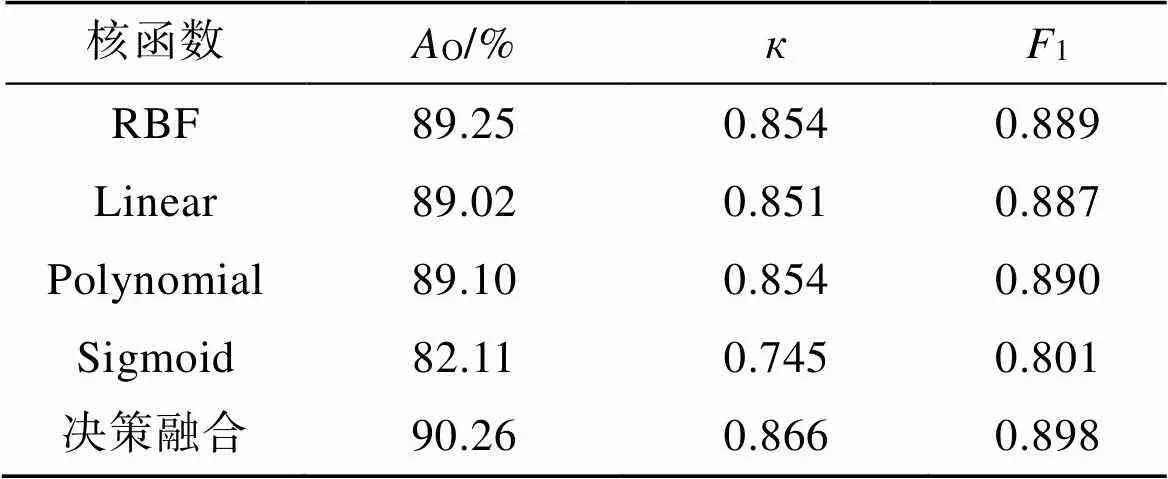
表9 单核与多核决策融合精度评价表
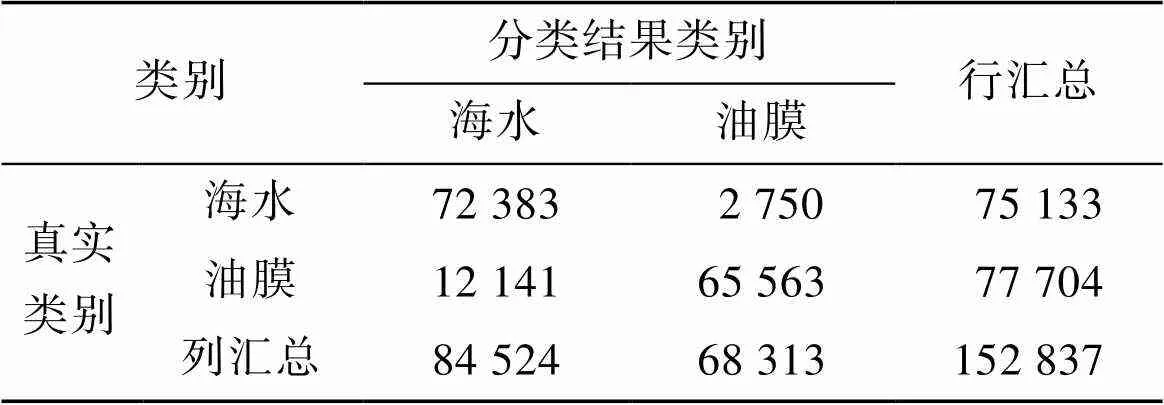
表10 多核SVM决策融合混淆矩阵
4 结论与展望
利用Sentinel-2多光谱遥感数据构建光谱和纹理特征, 基于巴氏距离筛选出最佳空谱特征数据集, 再构建SVM海面溢油检测模型从背景海水中区分出油膜, 最后将单核SVM分类结果通过算法进行决策融合与精度评价, 得出结论如下:
1) 以巴氏距离最大为准则, 对构建的30个单波段光谱、光谱指数和空间纹理特征进行评价, 组建不同特征量的溢油空谱数据集。经过对比实验, 最终得出蓝光/短波红外(R1)、蓝光(B1)、绿光/短波红外(R3)和熵(Entropy_1)等20个特征组成最佳溢油检测空谱特征数据集, 适用于Sentinel-2卫星遥感溢油检测。
2) 对于不同的特征数据集进行基于RBF核函数的SVM模型分类, 结果显示, 本文构建的最佳空谱特征数据集对应的分类精度最高, 相比指数+纹理特征集的O提高了1.16%, Kappa系数提高0.008,1分数提高0.003; 与光谱指数特征集相比,O增加了11.18%, Kappa系数提高0.181,1分数增加0.151。
3) 提出的多核SVM决策融合溢油检测模型的精度在各个指标上均有提升, 与单核模型相比O提高了1.0%~8.2%, Kappa系数提高了0.013~0.122,1分数提高了0.009~0.097。
基于特征选择方法可以筛选出检测准确率更高的最优特征数据集, 多核决策融合可以无需进行核函数的选择而达到更高的检测精度, 为海面溢油多光谱遥感检测的特征选择与方法提供重要参考。值得注意, 决策融合后虽对噪声得到改善, 但未完全解决暗油膜与复杂背景海水的同谱异物或相似纹理的情况, 还需进一步改善检测效果, 且在4个单核SVM模型与多核决策融合模型的分类结果均将船只错误分类为溢油, 这是由于本研究区船只的遥感反射率和灰度纹理特征与油膜相似。溢油检测研究中可以通过舰船检测方法识别船只并将其掩膜。
[1] 任广波, 过杰, 马毅, 等. 海面溢油无人机高光谱遥感检测与厚度估算方法[J]. 海洋学报, 2019, 41(5): 146-158.
REN Guangbo, GUO Jie, MA Yi, et al. Oil spill detection and slick thickness measurement via UAV hyperspectral imaging[J]. Haiyang Xuebao, 2019, 41(5): 146-158.
[2] SUN S, HU C, TUNNEL J W J. Surface oil footprint and trajectory of the Ixtoc-I oil spill determined from Landsat/MSS and CZCS observations[J]. Marine Pollution Bulletin, 2015, 101(2): 632-641.
[3] 苏伟光, 苏奋振, 杜云艳. 基于MODIS谱纹信息融合的海洋溢油检测方法[J]. 地球信息科学学报, 2014, 16(2): 299-306.
SU Weiguang, SU Fenzhen, DU Yunyan. MODIS based spectral and texture integration oil spill detection method[J]. Journal of Geo-information Science, 2014, 16(2): 299-306.
[4] HU C, LIAN F, HOLMES J, et al. Remote sensing estimation of surface oil volume during the 2010 Deepwater Horizon oil blowout in the Gulf of Mexico: Scaling up AVIRIS observations with MODIS measurements[J]. Journal of Applied Remote Sensing, 2018, 12(2): 026008.
[5] 陆应诚, 刘建强, 丁静, 等. 中国东海“桑吉”轮溢油污染类型的光学遥感识别[J]. 科学通报, 2019, 64(31): 3213-3222.
LU Yingcheng, LIU Jianqiang, DING Jing, et al. Optical remote identification of spilled oils from the SANCHI oil tanker collision in the East China Sea[J]. Chinese Science Bulletin, 2019, 64(31): 3213-3222.
[6] 沈亚峰, 刘建强, 丁静, 等. 海洋一号C星光学载荷对海面溢油的识别能力分析[J]. 遥感学报, 2020, 24(8): 933-944.
SHEN Yafeng, LIU Jianqiang, DING Jing, et al. HY-1C COCTS and CZI observation of marine oil spills in the South China Sea[J]. Journal of Remote Sensing (Chinese), 2020, 24(8): 933-944.
[7] 包萌, 张杰, 张晰, 等. 光谱信息与纹理特征结合的GF-1海上溢油检测研究[J]. 海洋科学进展, 2020, 38(3): 504-512.
BAO Meng, ZHANG Jie, ZHANG Xi, et al. Oil spill detection from GF-1 images with spectral and textural feature[J]. Advances in Marine Science, 2020, 38(3): 504-512.
[8] 杜凯, 马毅, 姜宗辰, 等. 海面太阳耀斑区的溢油光学遥感CNN检测方法研究[J]. 海洋科学, 2021, 45(4): 22-30.
DU Kai, Ma Yi, JIANG Zongchen, et al. Detection of oil spill in the sun glint region of optical remote sensing data based on the convolutional neural network method[J]. Marine Sciences, 2021, 45(4): 22-30.
[9] SRIVASTAVA H, SINGH T P. Assessment and development of algorithms to detection of oil spills using MODIS data[J]. Journal of the Indian Society of Remote Sensing, 2010, 38(1): 161-167.
[10] RAJENDRAN S, VETHAMONY P, SADOONI F N, et al. Detection of Wakashio oil spill off Mauritius using Sentinel-1 and 2 data: Capability of sensors, image transformation methods and mapping[J]. Environmental Pollution, 2021, 274: 116618.
[11] CHAUDHARY V, KUMAR S. Marine oil slicks detection using spaceborne and airborne SAR data[J]. Advances in Space Research, 2020, 66(4): 854-872.
[12] 范剑超, 王涛. 基于非负矩阵分解和支持向量机的墨西哥湾溢油HJ-1星遥感图像分类[J]. 海洋环境科学, 2015, 34(3): 441-446.
FAN Jianchao, WANG Tao. HJ-1 satellite remote sensing image segmentation in the oil spill of Mexico Gulf base on the non-negative matrix factorization and support vector machine[J]. Marine Environmental Science, 2015, 34(3): 441-446.
[13] 谭琨, 杜培军. 基于支持向量机的高光谱遥感图像分类[J]. 红外与毫米波学报, 2008(2): 123-128.
TAN Kun, DU Peijun. Hyperspectral remote sensing image classification based on support vector machine[J]. Journal of Infrared and Millimeter Waves, 2008(2): 123- 128.
[14] LU Y C, LI X, TIAN Q J, et al. Progress in marine oil spill optical remote sensing: detected targets, spectral response characteristics, and theories[J]. Marine Geodesy, 2013, 36(1): 334-346.
[15] CORTES C, VAPNIK V. Support-Vector networks[J]. Machine Learning, 1995, 20(3): 273-297.
[16] 李广洋, 寇卫利, 陈帮乾, 等. 多核学习算法及其在高光谱图像分类中的应用研究进展[J]. 地球信息科学学报, 2021, 23(3): 492-504.
LI Guangyang, KOU Weili, CHEN Bangqian, et al. Multiple kernel learning algorithm and its application research progress in hyperspectral image classification[J]. Journal of Geo-information Science, 2021, 23(3): 492-504.
[17] 汪廷华, 陈峻婷. 核函数的选择研究综述[J]. 计算机工程与设计, 2012, 33(3): 1181-1186.
WANG Tinghua, CHEN Junting. Survey of reserch on kernel selection[J]. Computer Engineering and Design, 2012, 33(3): 1181-1186.
Multi-spectral remote sensing detection of marine oil spill based on multi-kernel SVM decision fusion model
DAI Yu-xin1, 2, MA Yi2, 3, JIANG Zong-chen4, DU Kai5, WANG Hai-qi1
(1. College of Oceanography and Space Informatics, China University of Petroleum (East China), Qingdao 266580, China; 2. First Institute of Oceanology, Ministry of Natural Resources, Qingdao 266061, China; 3. Technology Innovation Center for Ocean Telemetry, Ministry of Natural Resources, Qingdao 266061, China; 4. Harbin Institute of Technology, Harbin 150001, China; 5. Shandong University of Science and Technology, Qingdao 266590, China)
After an oil spill accident, accurate oil spill detection is needed to support the on-site emergency response to the accident and the rapid and effective treatment of sea surface pollution. In this paper, a sentinel-2 multispectral remote sensing image is used to construct spectral feature indices based on the OIF index to extract the spectral features of oil spills on the sea surface. The texture features of oil spills are extracted based on the gray level co-occurrence matrix (GLCM). The feature selection method is used to construct an optimal texture and spectral feature dataset of oil spills on the sea surface. In this paper, a multi-core decision fusion support vector machine (SVM) model is proposed to detect the oil spill accident of the “A Symphony” tanker in the Yellow Sea. The experimental results show that under the complex water-color background, the detection results of the optimal texture and spectral feature dataset reach 89.25%, the Kappa coefficient is 0.854, and the1-score is 0.889. After multi-kernel SVM decision fusion, the OA, Kappa coefficient, and1-score reach 90.26%, 0.866, and 0.898, respectively. The OA, Kappa coefficient, and1-score increase by 1.0%–8.2%, 0.013–0.122, and 0.009–0.097, respectively, compared with those of the single-kernel SVM. The experimental results show that the proposed oil spill detection model has high accuracy and robustness, and the proposed method is suitable for oil spill detection.
remote sensing; oil spill detection; feature extraction; support vector machine (SVM); decision fusion
Aug. 24, 2021
[Natural Science Foundation of China, No. 61890964; Joint Funds of the National Natural Science Foundation of China, No. U1906217]
P76
A
1000-3096(2022)07-0011-13
10.11759/hykx20210824001
2021-08-24;
2021-11-29
国家自然科学基金重大项目 (61890964); 山东省联合基金项目(U1906217)
戴渝心(1998—), 女, 硕士研究生, 主要从事遥感图像处理与应用研究, E-mail: dyx0726@fio.org.cn; 马毅(1973—),通信作者, 男, 研究员, 主要从事海岛海岸带遥感与应用研究, E-mail: mayimail@fio.org.cn
(本文编辑: 丛培秀)