基于滑模控制的并联DC/DC变换器均流控制策略*
2022-08-04刘晓东石文龙张前进刘宿城郝陈军孙海涛
刘晓东,石文龙,张前进,刘宿城,郝陈军,孙海涛
(1.安徽工业大学电力电子与运动控制重点实验室,安徽 马鞍山 243032;2.国家电网抚顺供电公司,辽宁 抚顺 113000)
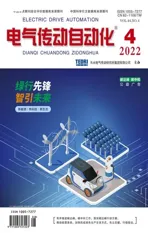
随着电力电子技术的迅猛发展,直流分布式电源并联已成为大功率直流供电系统的重要运行方式,其系统结构如图1所示。相对于传统的集中式供电而言,分布式电源模块并联可以改变并联模块数量来应对不同功率的负载,使系统更灵活;模块化设计利于实现冗余功能,提高系统可靠性;开关频率的提高,增大了系统的功率密度[1]。分布式并联的DC/DC变换器广泛用于低压直流微电网、通信设备、计算机系统以及不间断直流供电系统[2-6]。由于分布式多模块并联的Buck变换器为非线性时变系统,而传统的均流方法很难实现复杂的非线性控制策略,所以采取非线性控制策略有重要的理论意义和实用价值。
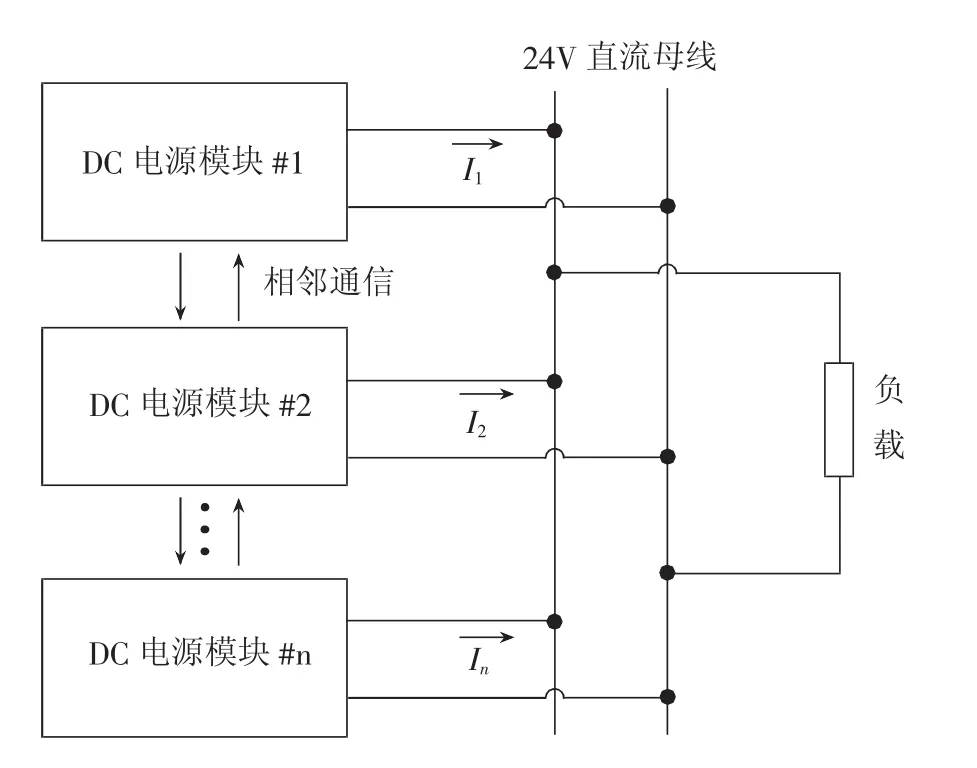
图1 分布式并联直流供电系统结构图
本文针对分布式并联的Buck变换器系统,使用鲁棒性更强的积分滑模(ISM)控制器实现在电路参数不一致以及负载发生突变时,提高输出电压抗干扰能力和动态性能;其次,为解决分布式并联系统的均流问题,基于离散一致性算法,只增加了稀疏弱通信环节,即可使分布式系统最终状态达到一致;最后,通过仿真验证了所设计的控制器既提高输出电压的动态品质和抗扰性,又能实现多模块并联电源的均流控制,提高系统的稳定性。
1 基于离散一致性算法的分布式均流控制
多个电源模块并联通过下垂控制,母线电压未达到额定电压,容易造成系统不稳定。因此多个电源模块可通过分布式协同控制,仅与相邻模块通信即可实现输出功率均衡、恢复母线电压、即插即拔等功能。
基于图论,考虑由n个电源模块组成的系统,该网络拓扑如图2所示,构成无向图G={V,E,A}。其中节点集合为V={v1,v2,…,vn},vi则表示为第i个节点。边集合E⊆V×V,边eij=(vi,vj)表示节点之间连通的边,邻接加权矩阵A=[aij],其中非对角元素aij用来表示第j个模块的在第i个电源模块的权重,若存在通信aij>0,否则aij=0且对角元素aij=0[13]。
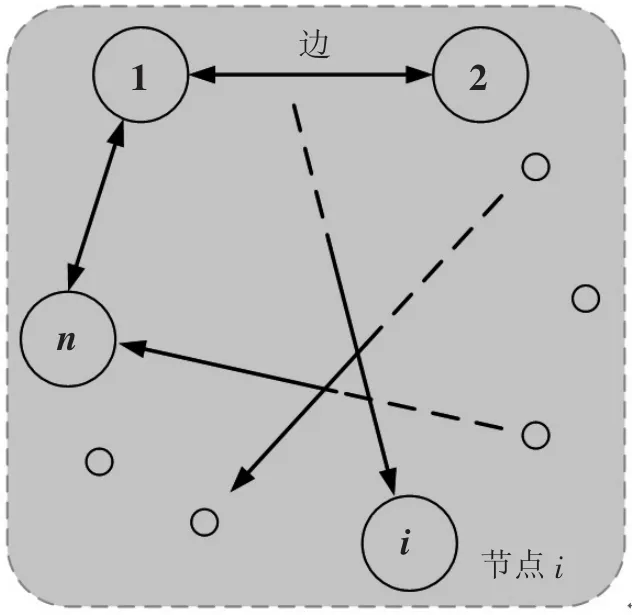
图2 多电源模块通信网络拓扑图
度矩阵D=diag{d1,d2,…,dn},令度矩阵D的行总和等于邻接矩阵的行总和,即则图G的拉普拉斯矩阵L=D-A,矩阵L的次小特征根决定一致性算法的收敛速度。令状态变量X(k)=[x1(k),x2(k),…,xn(k)],xi(k)表示节点i在k时刻的状态变量。对于任意节点i第k时刻的离散一致性算法可以表示为:

式中,ε为加权系数,通过改变ε的大小可以调节算法的收敛速度。考虑整个系统状态变量,令矩阵P=I-εL,将上式写成如下矩阵形式:

根据Perron-Frobenius定理,对P非负矩阵有左特征向量v=[1,1,…,1],使Pv=v成立,且存在右特征向量wT=[1,1,…,1]T,使wTP=wT和vTw=1成立。则有由上面的定理可以将式(3)改写为:

对于整个系统拓扑的有向图如果是平衡的,即[1,1,…,1]TL=0,则任意节点的状态变量最终会收敛到其初始值的平均值:

图3为所提出系统的控制结构图,包含2个电源模块的物理层、通信网络层和控制层。物理层由2个电源模块并联到同一直流母线上。网络层中每个模块与相邻模块互相通信,实时交换母线电压和输出电流。控制层中由下垂控制实现电流均衡,一致性算法补偿电压跌落且进一步提高均流精度,最终实现恢复母线电压。

图3 分布式并联系统控制结构图
图3控制层中通过电压观测器和电流观测器,由电压偏差量和电流校正项共同作用,来调节每个电源模块的电压参考值,进一步提高了系统的均流精度。由电压观测器产生的修正项如式(2)所示,而电流观测器产生的电流校正项△i可以表示为:

式中,ci为耦合系数,为第i个电源模块的标准值,可以写为。当所有电源模块电流一致时,电流修正项为零,如果电源模块电流之间有不一致,调节器将调整电流校正项以恢复平衡。
2 积分滑模控制器的设计
2.1 并联Buck变换器数学模型
以两个电源模块并联的Buck变换器为例,电路拓扑如图4所示。图中,Vin、Vo和iL分别为直流输入电压、输出电压和电感电流,S、D分别为可控开关管和续流二极管,L、C和R分别为电感、电容和负载电阻。考虑Buck变换器工作在连续导通模式。
图4 并联Buck变换器的电路拓扑
由并联Buck变换器在可控开关管导通和关断下的微分方程,可以得到Buck变换器的状态空间表达式为:
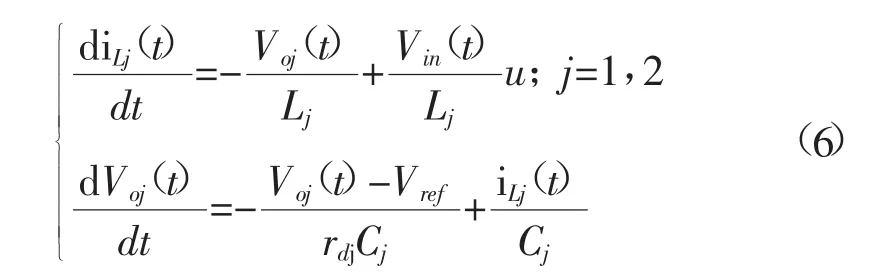
式中:iL(t)为电感电流;Vo(t)、Vin(t)分别为输出、输入电压;u为开关管导通占空比,0≤u≤1。
由于输入电压的不可控性,采用输出电压作为状态变量,电感电流作为控制变量,控制输出电压跟踪到参考电压值。定义输出电压误差:

式中:x1、Vref分别为输出电压误差和输出电压参考值。则输出电压误差积分x2为:

联合式(6)、式(7)和式(8),在无扰动的情况下,可以得出Buck变换器控制系统的状态方程:
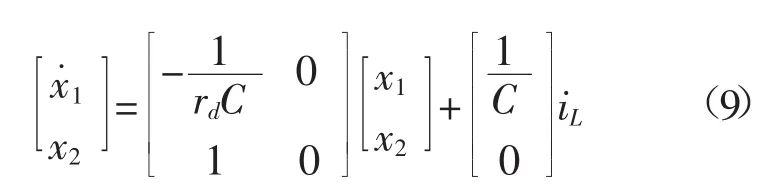
考虑外部负载扰动的影响,根据状态方程(9)对扰动进行分离,可得系统状态矩阵、输入矩阵和扰动项分别为:
2.2 积分滑模面设计
本文基于电压跟踪误差x1以及电压跟踪误差的积分x2,设计积分滑模面:

式中,S、c1和c2分别为所设计的积分滑模面、输出电压误差增益和输出电压误差积分增益,且c1>0,c2>0。
滑模控制过程可以分为两个模式,如图5所示。在趋近模式中,轨线从空间内任意初始位置趋近滑模面,在切换控制下,使运动轨迹始终维持在滑模面附近;在滑动模式下,当滑动模态存在,且滑模面S=0上有稳定的平衡点X=0时,轨线沿着滑模面稳定在平衡点处。
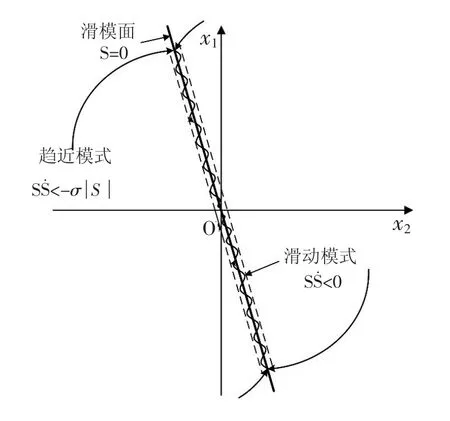
图5 滑模控制过程示意图
通过Lyapunov函数,判别系统的稳定性,设计出滑模函数的参数C。
假设系统为:

并且系统是稳定的,即状态矩阵A的特征根都在左半平面,则存在任意的正定矩阵P>0、Q>0,使得XT(ATP+PA)X=-XTQX成立。令输入变量u=-kX+v,As=A-kB,即输入变量u为线性控制。将u带入式(6)中得:

对于任意的正定矩阵P>0,Q>0,使AsTP+PAsT=-Q。
定义Lyapunov函数V=XTPX>0。∀X≠0对V求导得:
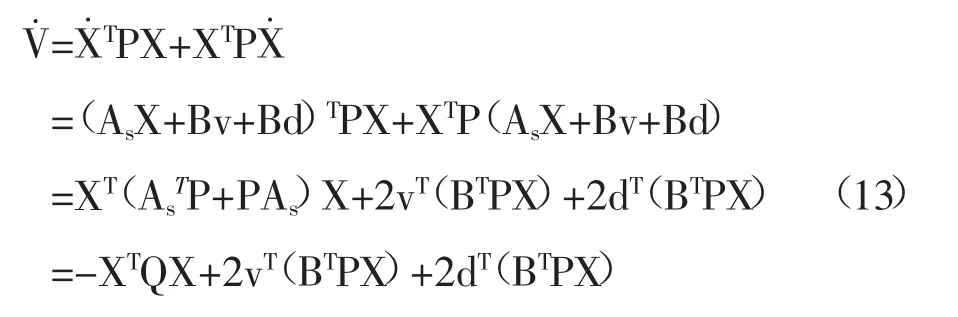
如果取滑模函数S=BTPX=CX,当系统达到滑模面上时,S=0。此时=-XTQX<0。由Lyapunov稳定性判据,当C=BTP时滑动模态稳定,系统存在滑动模态,且最终收敛于X=0。为了简化计算,方便工程实现,一般选取CB=I。
趋近模式中S≠0,为了保证系统在有限时间内达到滑模面上,需要设计Buck变换器输入变量I使得SS<-σ‖S‖(S≠0,σ>0)。
由式(4)、(5)可以得出滑模S的时间导数:

由CB=I,且当控制变量IL为等效控制变量Ieq时,可以得出等效控制为:

等效控制下的状态轨迹为理想的滑模运动。仅当系统状态已经处于滑模面上,在等效控制下保持系统状态在滑模面上滑动,并不能使系统在有限时间内趋近滑模面。为了改善趋近阶段的动态品质,需要加入切换控制项来控制滑动轨迹,使运动轨线最终到达滑模面S=0上。控制器进一步修正为:


式中,ε为边界层厚度。

将式(14)、式(16)和式(17)代入式(18)中,可得

引入初始值x2(0)消除了由于积分误差导致初始轨迹到滑模面时间过长的问题,提高系统启动过程的响应速度。
综上所述,选取适当的滑模面S保证系统滑动模态存在,设计参数C将直接影响滑动模态的稳定性和动态品质。对于控制项的设计,应满足在滑模控制下系统在有限时间内到达滑模面,且维持在滑模面附近。在只了解系统参数和外部扰动的上下界的情况下,引入切换函数不仅能抑制由于参数变换和外部扰动带来的抖振,且不依赖于系统的精确模型,具有较强的鲁棒性。
3 仿真结果与分析
为了对所提方法进行验证,依据图3中在Matlab/Simulink中搭建由两个Buck变换器并联的模型,并且在控制方法上与传统双闭环PI控制进行比较。Buck变换器的具体规格见表1。
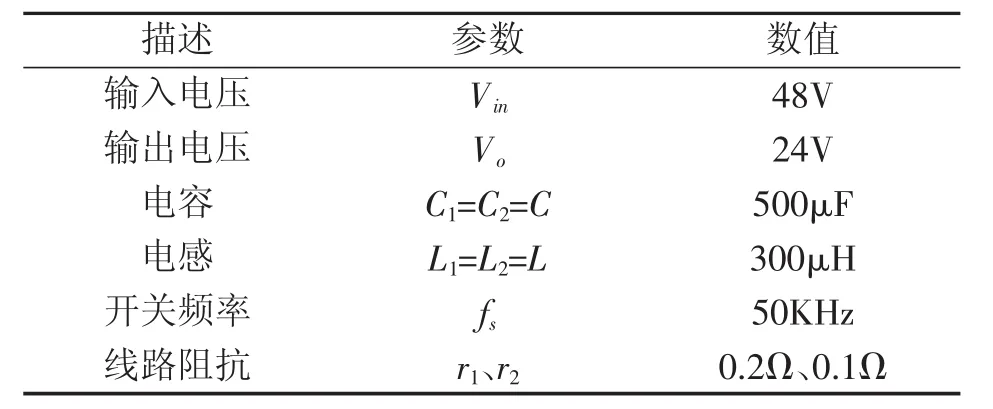
表1 Buck变换器规格
先将各个仿真的控制器的参数调至相对最优,在线路阻抗未知的情况下,下垂系数采用相同值rd=0.2。假设系统母线电压参考值为24V,负载在t=0.5s和t=1s时,由3Ω→6Ω→3Ω跳变。图6(a)、(b)分别显示了,在分布式一致性算法PI控制下和在所提的分布式一致性算法滑模控制策略下母线电压和输出电流的仿真波形。可以看出在采用所提的控制策略下,负载跳变前补偿由下垂带来的母线电压跌落,以及负载跳变后母线电压仍能恢复至额定值,不同外特性条件下输出电流实现均流。
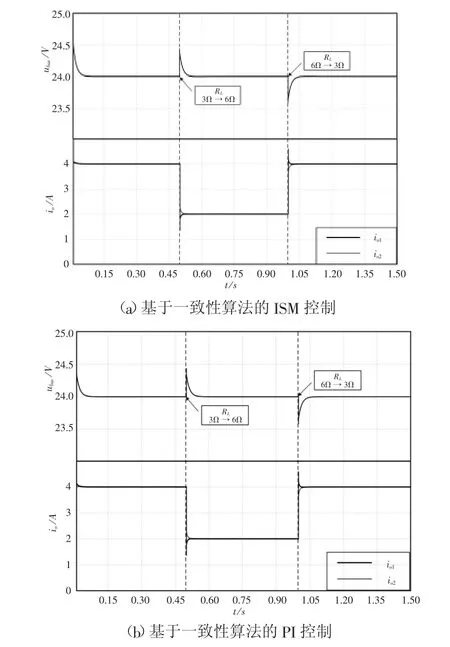
图6 负载跳变中母线电压和输出电流波形
图7为突加、突减负载时母线电压瞬态特性曲线,可以看出当并联变换器负载发生跳变时,母线电压恢复过程时间以及动态响应均比PI控制更优。
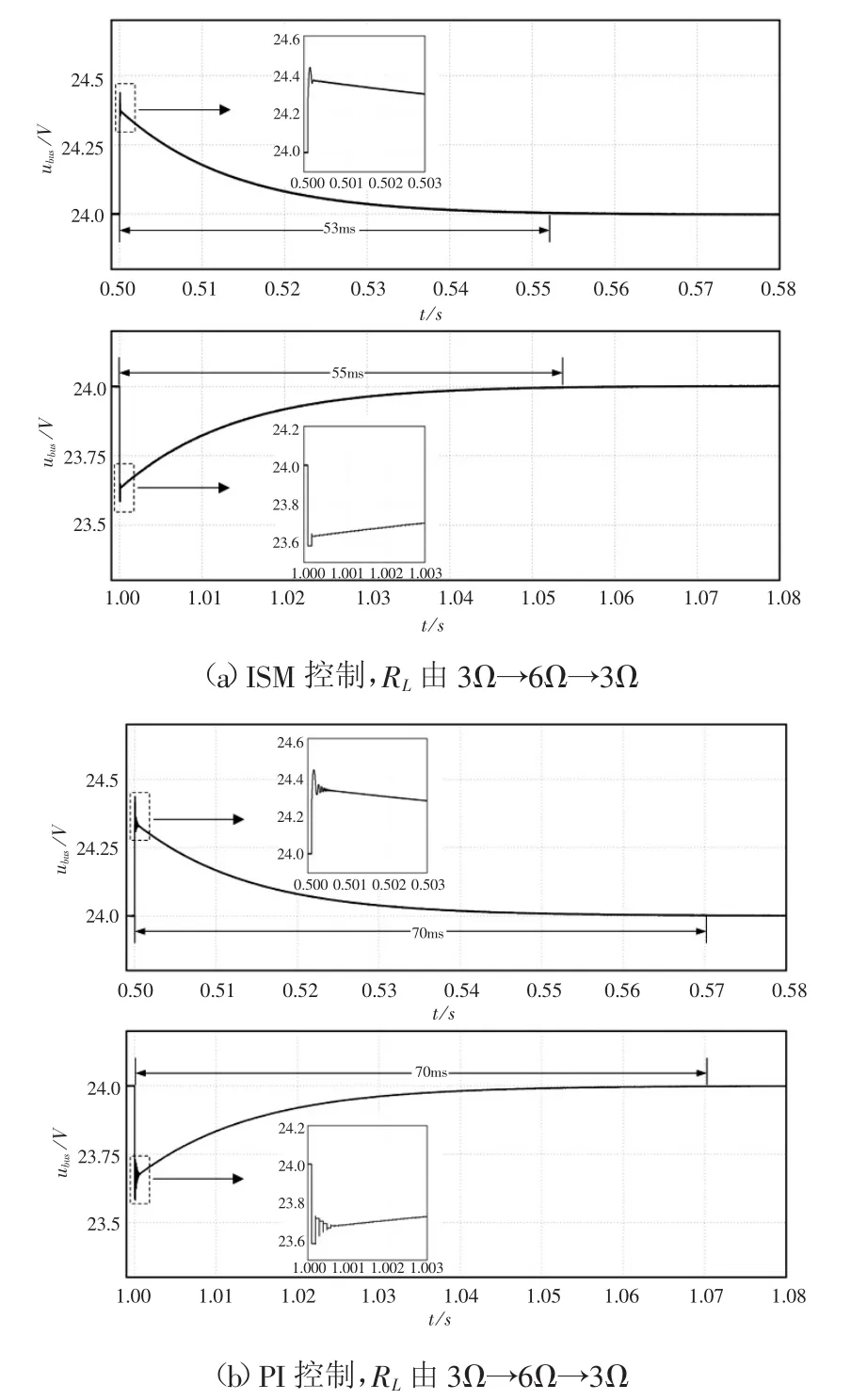
图7 负载跳变时分布式并联系统的母线电压瞬态特性
图8为在负载跳变时输出电流实现均流的瞬态特性。可以看出此方法可以实现电流均衡,由于均流的时间由一致性迭代的次数决定,上述控制均采用相同的一致性算法,因此均流时间几乎一致,但采用本文策略在负载跳变时,输出电流非常稳定几乎没有振荡,其动态性能相比PI控制更优。
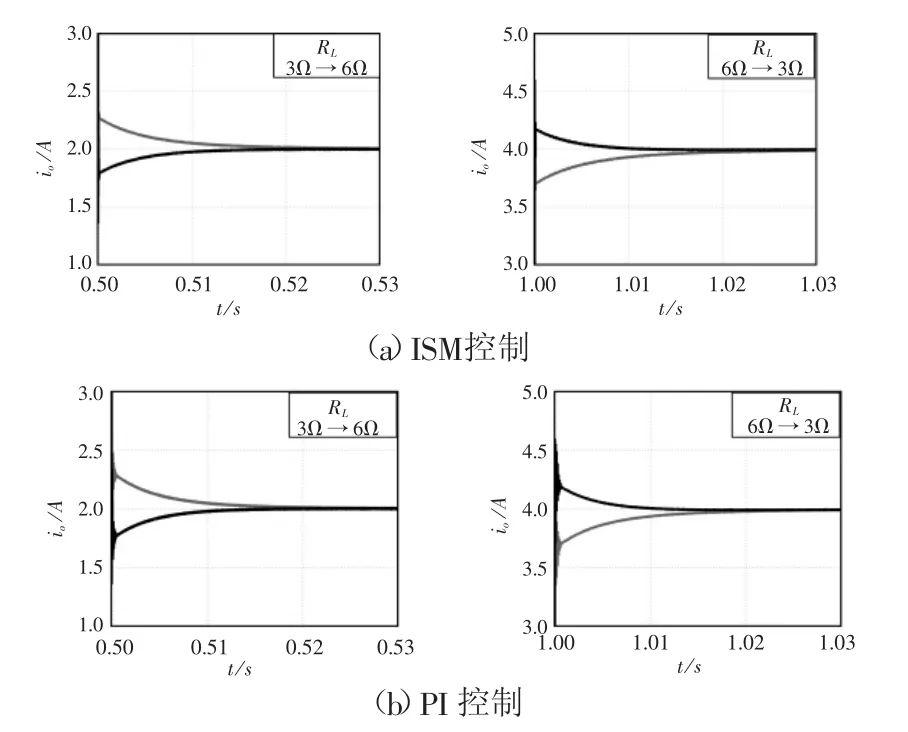
图8 输出电流动态均流波形
图9为两个模块并联的电感电流波形,电感电流从4A变为2A,再从2A恢复到4A的过程。可以看出系统受到阶跃负载扰动时,采用基于一致性算法的ISM控制下,电感电流超调量和恢复时间均小于PI控制,证明了所提控制方法响应速度快、控制精确度高的性能优势[15]。

图9 电感电流输出波形
4 结论
本文主要研究了大功率直流供电系统中并联均流控制方法,提出使用基于一致性算法的积分滑模(ISM)控制。针对并联DC/DC变换器在负载发生严重扰动的情况下,仍能保持良好的动态性能、强鲁棒性和可靠性。并将传统基于一致性的PI控制及基于一致性的ISM控制做了对比,结论如下:
(1)传统下垂控制仅能实现输出电流均分,并没有考虑母线电压的跌落,因此存在电压偏差问题,系统不能保持稳定;基于一致性算法的下垂控制既可以实现输出电流均衡,又能使母线电压偏差得以消除,但负载严重扰动时其动态性能难以满足要求。
(2)本文提出基于一致性算法的积分滑模(ISM)控制。不仅可以实现消除母线电压偏差,解决电流均衡问题,而且在系统受到扰动时,可以使分布式并联Buck变换器系统响应速度和抗干扰能力得到提升。