基于预测模型的无人赛车路径规划算法研究*
2022-07-26龚国铮郑少武钟思祺叶鸣李巍华
龚国铮 郑少武 钟思祺 叶鸣 李巍华
(1.华南理工大学,广州 510641;2.深圳裹动智驾科技有限公司,深圳 518054;3.广州华工机动车检测技术有限公司,广州 510640)
主题词:无人驾驶赛车 路径规划 模型预测控制 操纵稳定性 最优路径
1 前言
保证无人驾驶车辆高速工况下的行驶安全性,是无人驾驶技术推广的难点,而无人赛车更需要稳定可靠的算法保证高速行驶安全性。无人赛车路径规划系统的首要目标是在保证赛车稳定性和安全性的前提下,充分利用轮胎极限以实现最小圈速,因此需要一种能够在极限工况下兼顾赛车效率与安全性的路径规划算法,目前相关研究较少。
早期路径规划算法的研究以图搜索算法、基于采样的算法为主。图搜索算法包括Dijkstra、A*等算法,基于采样的算法以快速扩展随机树(Rapidly Exploring Random Tree,RRT)为代表。目前,图搜索算法构建路网所需的时间较长,而RRT 算法规划路径会导致随机性和曲率不连续的问题,基于最优化理论的路径规划算法可有效解决这些问题,因此近年来得到了广泛应用。
模型预测控制(Model Predictive Control,MPC)是广泛应用于无人驾驶车辆控制领域的算法,近年来也被用于路径规划,如无人驾驶避障。文献[13]提出了一种基于MPC 的统一路径规划方法,该方法可以自动确定车道保持、变道、匝道合并等多种不同的机动模式并进行统一的路径规划,但未考虑车辆的稳定性约束。文献[14]提出一种基于无源MPC 的方法来保持或改善在不确定性下路径规划的性能,通过引入无源约束提高路径规划稳定性,但只控制了转向,没有考虑车速变化。文献[15]提出了一种规划控制耦合的方法,通过设计目标函数和相关约束将规划控制问题转化为最优化问题,但没有考虑侧偏角约束。上述方法大多针对乘用车工况,不适用于无人赛车,且除文献[12]外,均未考虑行驶稳定性约束,若直接用于无人赛车,将增加赛车在高速行驶或路面附着条件较差时失控的风险,此外,还需要考虑边界约束使赛车保持在赛道内行驶。
综上,路径规划算法研究大多未综合考虑边界约束与车辆行驶稳定性约束问题,因此,本文面向无人驾驶电动方程式赛车,提出一种基于预测模型的路径规划方法,将多种约束下的无人赛车路径规划问题转化为二次规划问题,基于预测模型完成问题的求解,设计多组仿真测试,利用CarSim/Simulink 仿真验证算法性能,并与其他方法进行对比。
2 车辆动力学预测模型
2.1 车辆动力学建模
复杂的车辆模型会降低算法效率,为兼顾效率与精度,使用自行车模型对赛车进行建模,为简化计算,只考虑车辆的平面运动,忽略车辆的俯仰与侧倾运动,建立如图1所示的车辆动力学模型,基本动力学方程为:
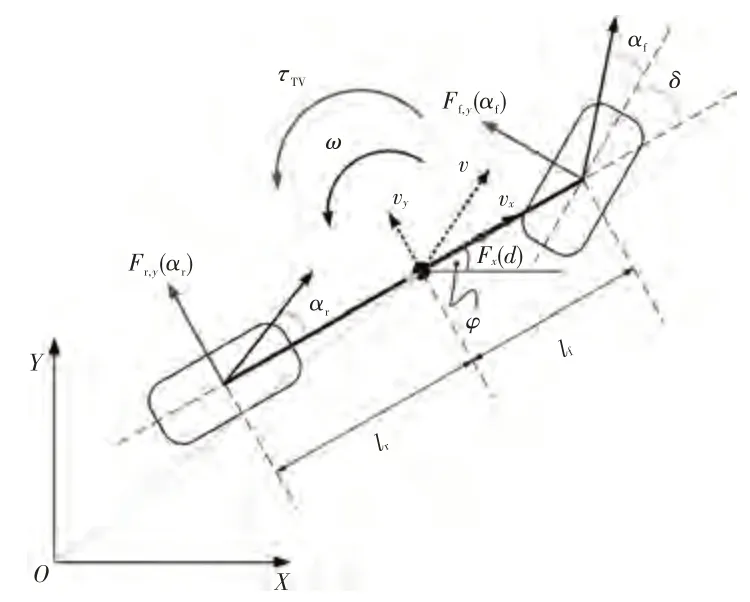
图1 车辆动力学模型
式中,为车辆质量;I为车辆绕轴的转动惯量;、分别为质心到前轴和后轴的距离;()为全局坐标系下质心的坐标;为质心航向角;v、v分别为车辆坐标系下质心的纵向、横向速度;为车辆横摆角速度;为前轮转角;、分别为前、后轮的侧向力;F为车辆所受纵向力;=(-)为附加扭矩,由比例控制器建模;=δv/(+)为运动学理想目标角速度;为比例控制系数,与底层控制器有关。
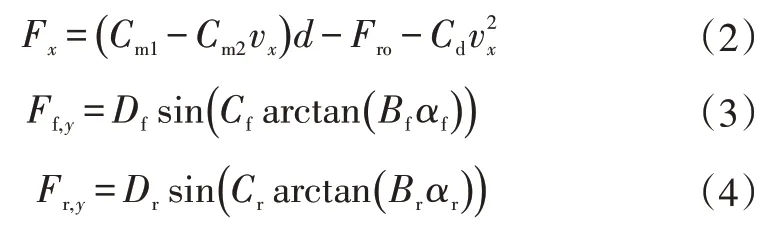
考虑赛车与路面的相互作用,选择魔术公式轮胎模型对轮胎侧向力进行建模与计算;假设赛车动力由直流电机提供,且为后轮驱动,赛车纵向力F由直流电机模型及所受阻力建模。计算公式分别为:

2.2 预测模型构建
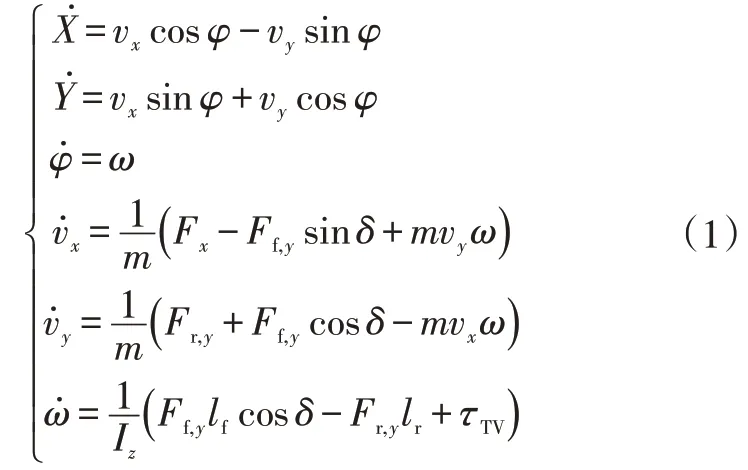
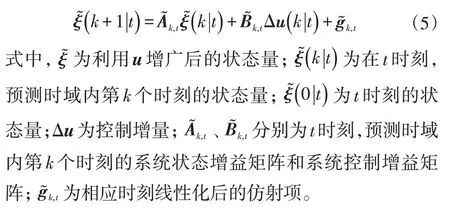
为对车辆行为进行预测,需要对此非线性动力学模型进行预处理,将其转化为线性预测模型。定义系统状态量=(X,Y,φ,v,v,ω),系统输入量=(),利用一阶泰勒展开对式(1)车辆模型进行线性化处理,接着利用零阶保持器(Zero-Order Hold,ZOH)进行离散化处理,车辆的动力学模型可表示为:
3 模型预测路径规划算法
为设计无人赛车的路径规划算法,需要分析无人赛车的行驶目标,通过目标函数设计及施加约束,将路径规划问题转化为二次规划(Quadratic Programming,QP)问题并求解,得到满足赛车行驶要求的路径。
3.1 设计系统输出量
设计系统输出量是模型预测控制问题的关键,首先假设所有道路中心线坐标及对应的道路宽度已知。
算法解决的是在中心线已知情况下的赛车路径优化问题,首先对中心线建模,具体做法是对其进行参数化处理,定义∈[0,]为参考路径弧长变量,其中为路径总长度,通过三次样条插值可以将中心线坐标(,)表示成关于的函数()和(),可进一步求出中心线的方向角()。
令为道路起点到车辆最近中心线的弧长,其计算公式为:

MPC 问题的系统输出量通常为横向误差与纵向误差,但与的求解是非线性问题,且需要涉及的求解,尽管与车辆当前位置对应的可通过求解式(6)获得,但对于预测优化问题,难以利用(6)求出预测时域内每个时刻的。

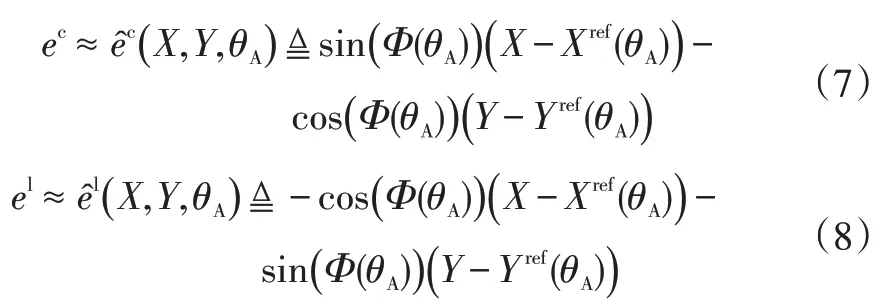
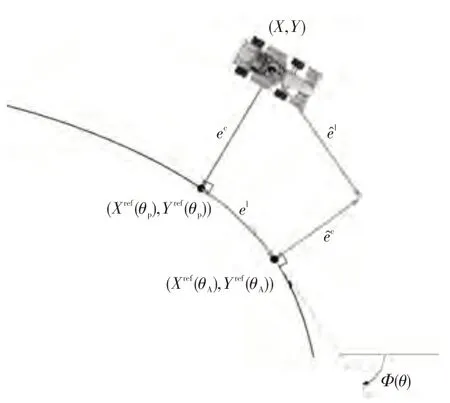
图2 车辆横、纵向误差真实值与近似值的对比
3.2 线性时变模型预测局部规划算法

3.2.1 目标函数
对于系统输出量,首先作以下设定:
设计目标函数时,考虑到赛车在指定时间内的行驶距离尽可能远,而可通过控制控制赛车的行驶距离,因此首先需要最大化,同时,为减少的估计误差,需要最小化;此外,仅考虑行驶距离求解得到的轨迹过于曲折,并非理想轨迹,相较于平滑轨迹,其总体角速度较大。为得到平滑轨迹,将角速度作为惩罚项加入到目标函数中,得到的目标函数为:
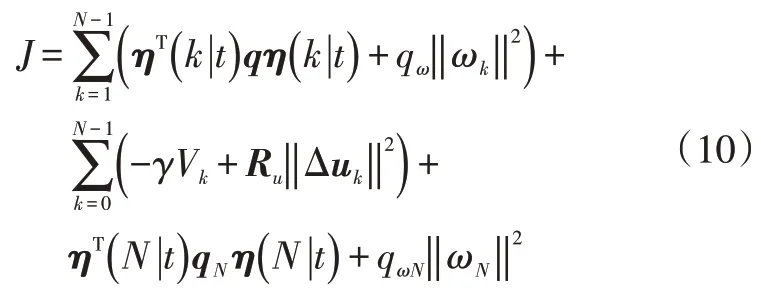
式中,=(,);q=(,);、分别为横向误差和纵向误差的权重,与MPC 算法不同,横向误差将被赋予较小的权重,使车辆能充分利用宽赛道的优势搜索出行驶距离最远的轨迹;V、Δu为预测时域内第个控制量;ω为预测时域内第个角速度,与上述分析相对应,ω为为保证轨迹的平滑,防止轨迹变化不平缓而加入到目标函数中的惩罚项;q为角速度的权重;为状态量的权重;R为控制量的权重矩阵;、、q分别为第个状态横向误差、纵向误差、角速度的权重。
将式(9)代入式(10)中并化简,目标函数可进一步整理成标准二次型的形式:矩阵。
3.2.2 边界约束
采用半空间约束的方法对赛车的行驶边界进行限制。假设预测时域内第个点(X,Y)对应的为,将边界约束定义为左、右边界点((),())、((),())切线组成的半空间,如图3所示。
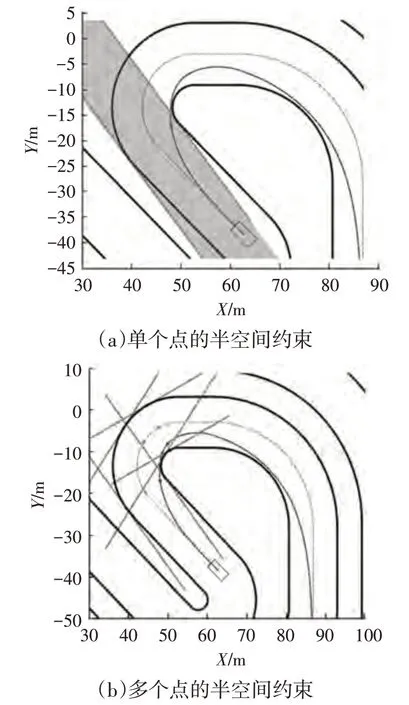
图3 边界约束
边界约束可表示为:

式(12)的物理含义见图3。在图3a中,中心线右侧是车辆预测轨迹,单个点对应的边界半空间约束是两侧边界点的切线所包围的区域。
3.2.3 横、纵向行驶稳定性组合约束
为避免车辆运行过程中失去操纵稳定性,基于横向、纵向行驶稳定性设计了线性行驶稳定性组合约束,包括滑移稳定性约束和轮胎极限约束。
3.2.3.1 滑移稳定性约束
滑移稳定性约束主要保证车辆横向稳定性,基于安全驾驶包络,在横向动力学模型的v-相轨迹图中划出一个使车辆状态收敛于平衡点的平行四边形区域,如图4所示。滑移稳定性约束如下:
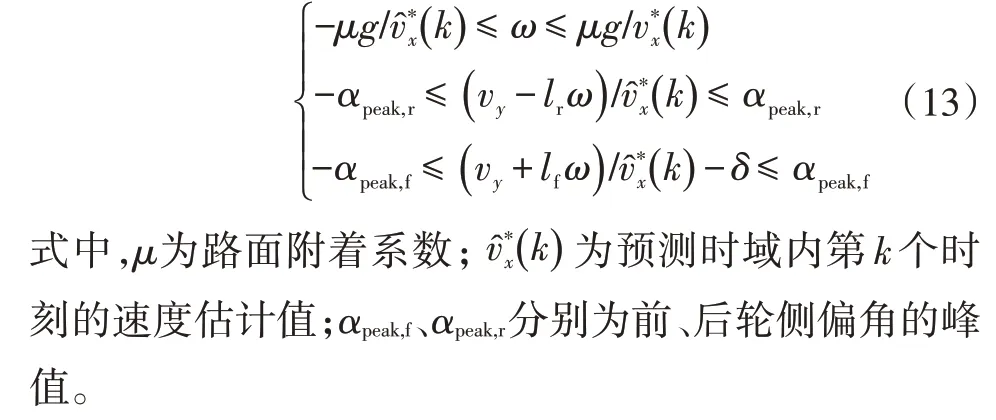
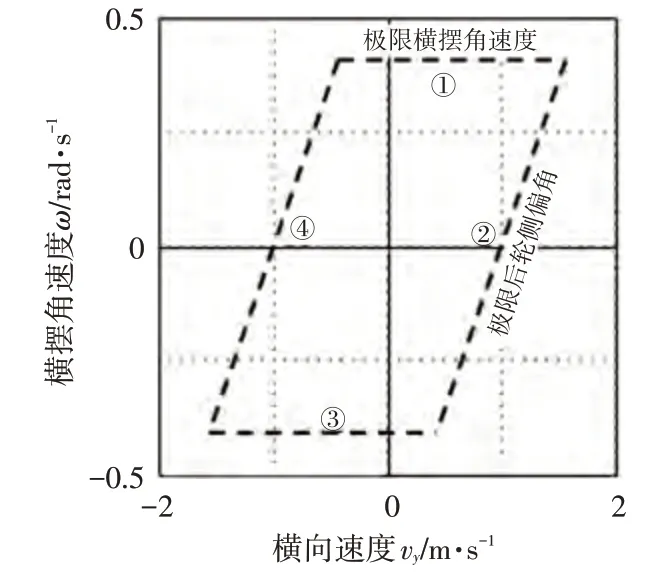
图4 安全驾驶包络范围
图4 中的①、③为最大横摆角速度约束,对应式(13)第1 个不等式;②、④为给定纵向速度的最大轮胎侧偏角约束,对应式(13)第2、第3个不等式,其中,第2个不等式约束是后轮侧偏角的约束,第3个不等式约束是前轮侧偏角约束,图中只绘制了第2个不等式约束的情况。
3.2.3.2 轮胎极限约束
为了保持赛车的操作稳定性,需将横、纵向力约束在附着椭圆内。因此,提出一种简化轮胎极限约束的方法,来约束整车横、纵向加速度对轮胎力进行限制:

式中,a、a分别为车辆质心处的纵向、横向加速度。
加速度矢量被限制在半径为的摩擦圆中,如图5所示。
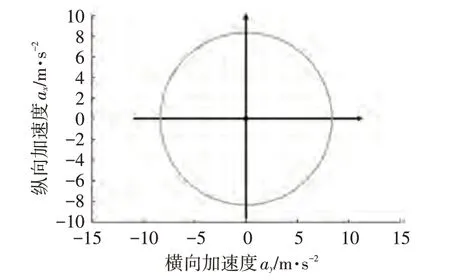
图5 加速度摩擦圆
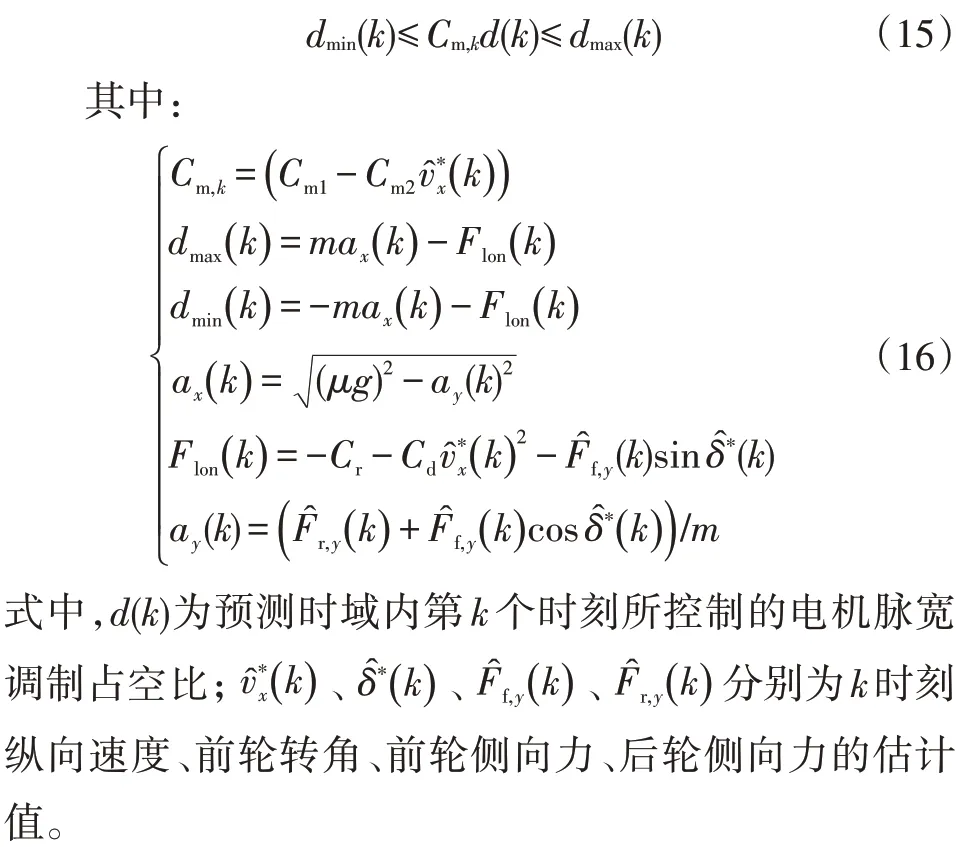
为简化求解,将式(14)转化为线性约束,在时刻求解纵向控制量时,将变量v、v、、视为常量,即第个预测时域采用估计值进行替代,将轮胎极限约束转化为只关于纵向控制量的线性约束:
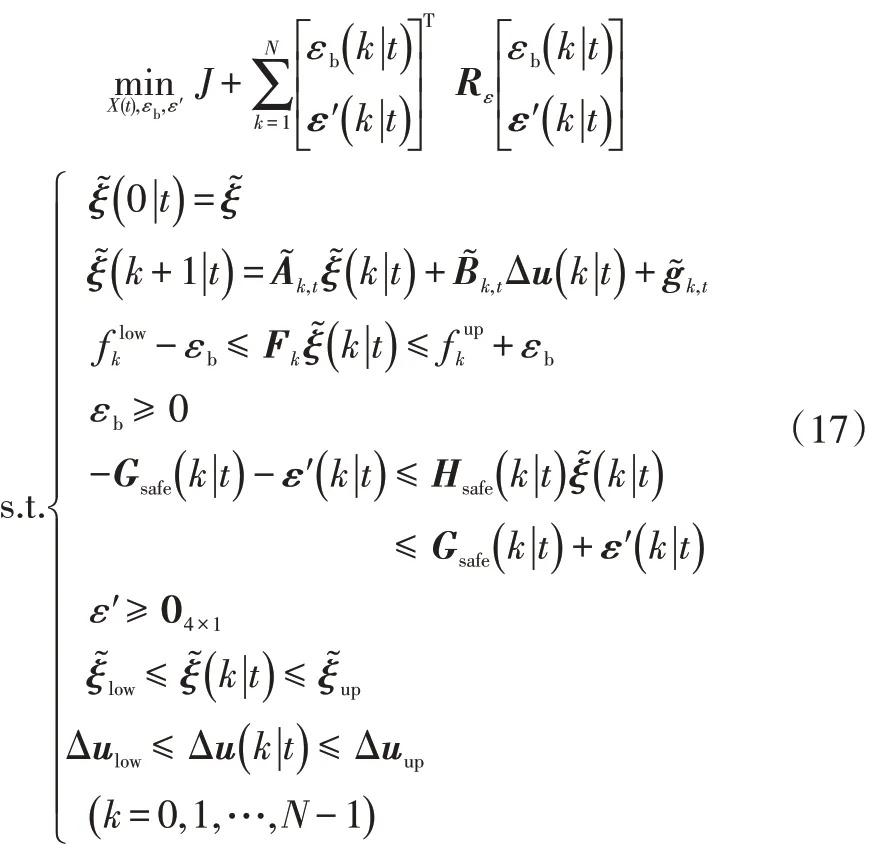
3.2.4 构建优化问题
通过目标函数设计并综合考虑多种约束,可以构建如下最优化问题:

4 仿真分析
4.1 局部规划算法仿真

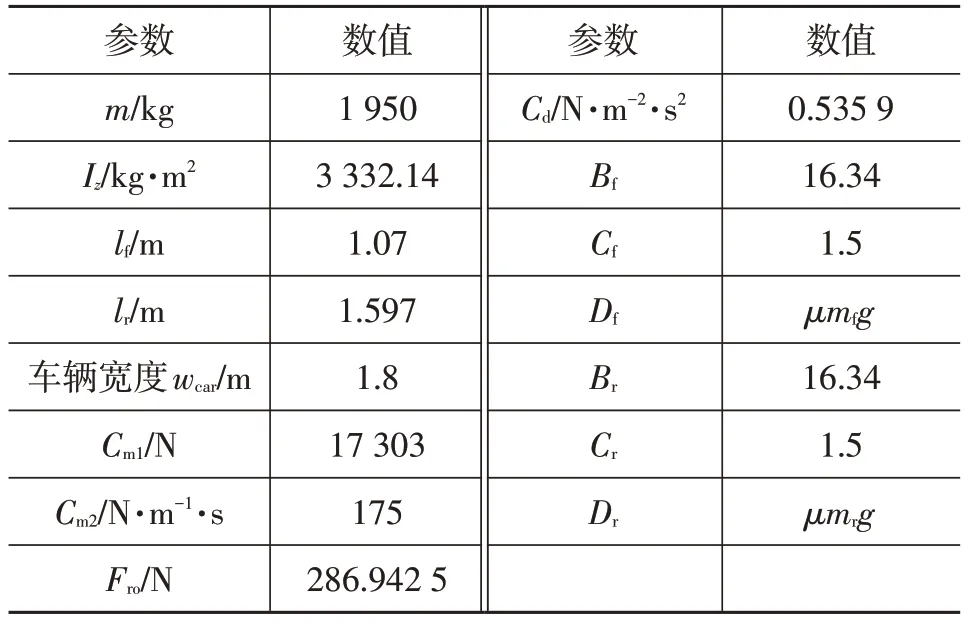
表1 车辆模型参数
后轴侧滑比前轴严重,因此设定前轮侧偏角峰值大于后轮。算法使用的仿真路径如图6所示,设定仿真时间为200 s,更新频率为500 Hz,预测时域=90 s,预测时域时间间隔=0.05 s。
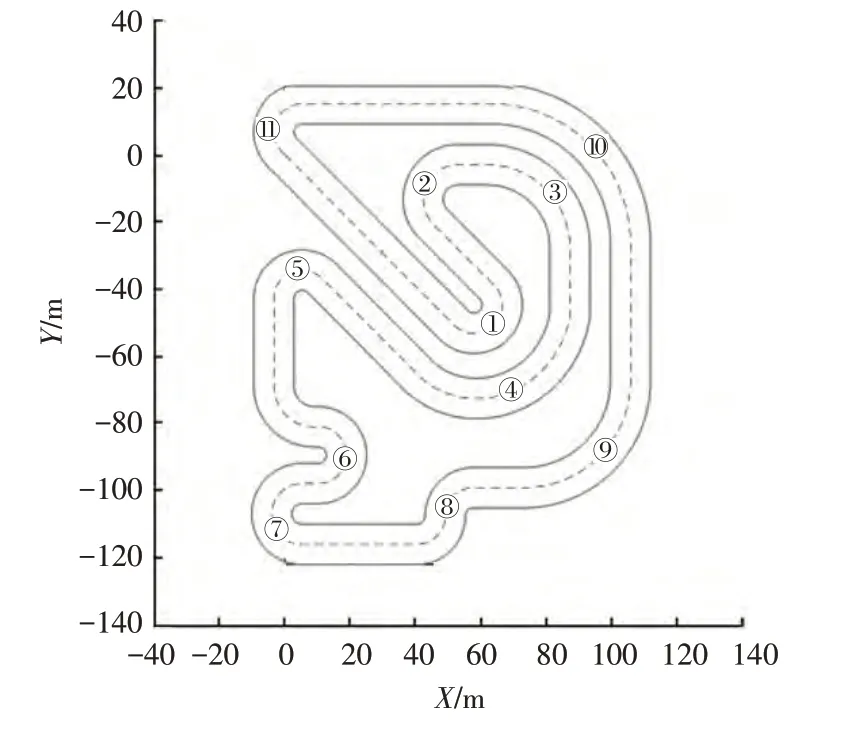
图6 仿真路径
仿真结果如图7~图10 所示。由图7 可以看出,高附着系数(=0.85)条件下,未加入约束的赛车在11 号弯道处出现了严重的后轴侧滑,赛车因未能预知侧滑危险而导致失控,由图10 可看出,此时赛车前、后轮侧偏角出现较大的峰值,说明赛车因过于追求速度而忽略了其稳定性;由图8 可看出,加入稳定性约束后赛车的行驶速度降低,提高了行驶的稳定性;图9显示,赛车行驶过程中充分利用了地面的附着力,加速度矢量基本在摩擦圆内。由图7a 可知,加入约束后赛车轨迹更加平滑,为保证车轮抓地力的稳定,在各弯道处,赛车的转弯半径会适当增大,使赛车顺利过弯,更符合实际行驶状况。
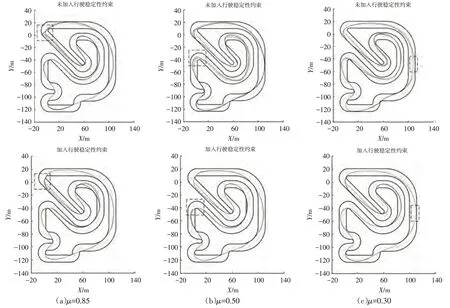
图7 车辆行驶轨迹
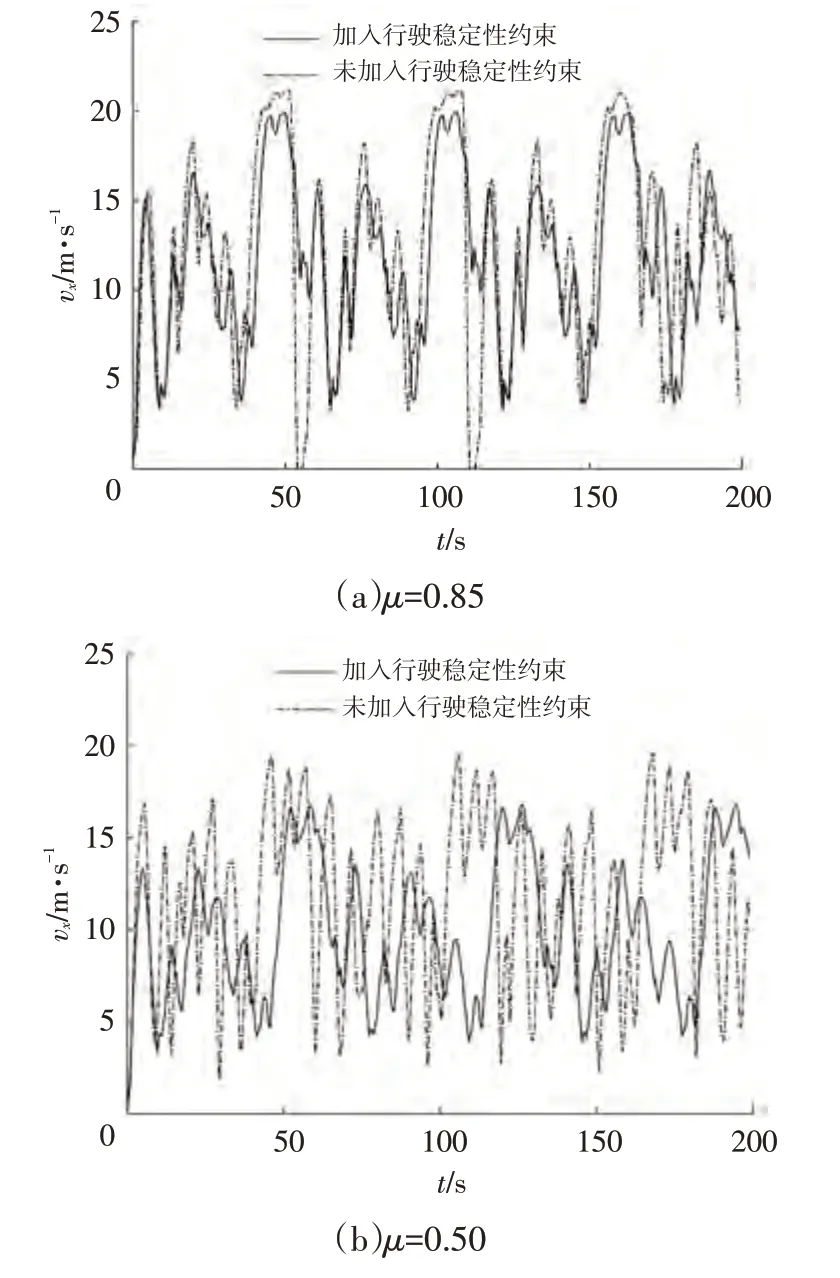
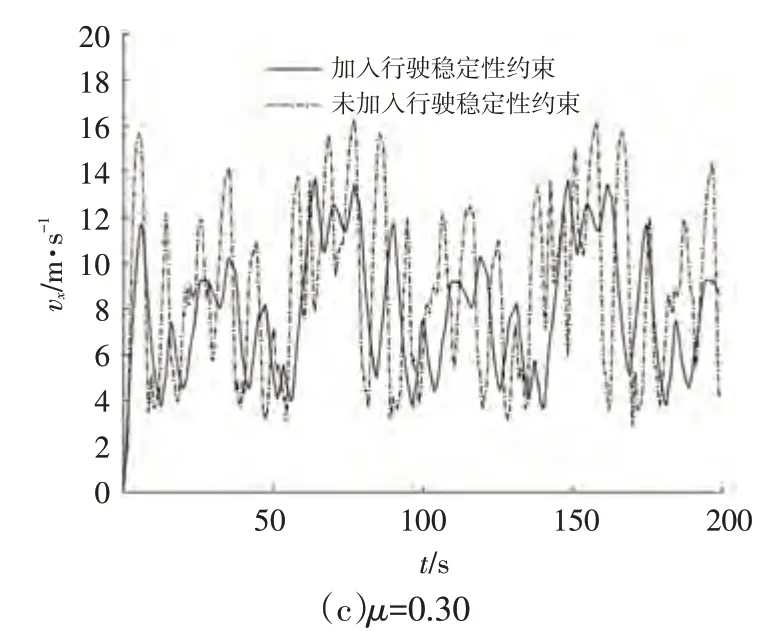
图8 行驶速度对比
中等附着系数(=0.50)和低附着系数(=0.30)条件下,未加入约束的赛车在多个弯道处(如5号弯道)出现不同程度的后轴侧滑,由图9 可知,算法均高估了地面所能提供的附着力,使得赛车在过弯时地面附着力不足,因此出现一定程度的前后轴侧滑,图10中的侧偏角峰值也说明了这一问题。另一个需要注意的问题是这2种工况下11号弯道并没有出现如图7a一样严重的侧滑,原因是预测模型在计算轮胎侧偏力时也会考虑附着系数,为保证边界约束,在中低附着系数时赛车过11号弯道不会加速到很高的速度。而高附着系数(=0.85)时因为算法高估地面附着力的作用,同时未能通过预测模型预知可能的侧滑失控危险,导致在11 号弯道处加速到较高的车速后无法及时减速;加入行驶稳定性约束后虽然降低了行驶速度(图8),但是保证了赛车在边界范围内稳定行驶,由图7c 可看出,在8~10 号弯道处赛车出现了驶出赛道的情况,若在实际行驶中可能已经发生了碰撞,但加入约束后的结果显示赛车行驶状况良好,且能够有效利用地面附着力(图9)。由于本文算法并非车辆控制算法且未以最小化横向控制误差作为优化目标,因此没有定量比较不同地面附着条件下的横向误差。
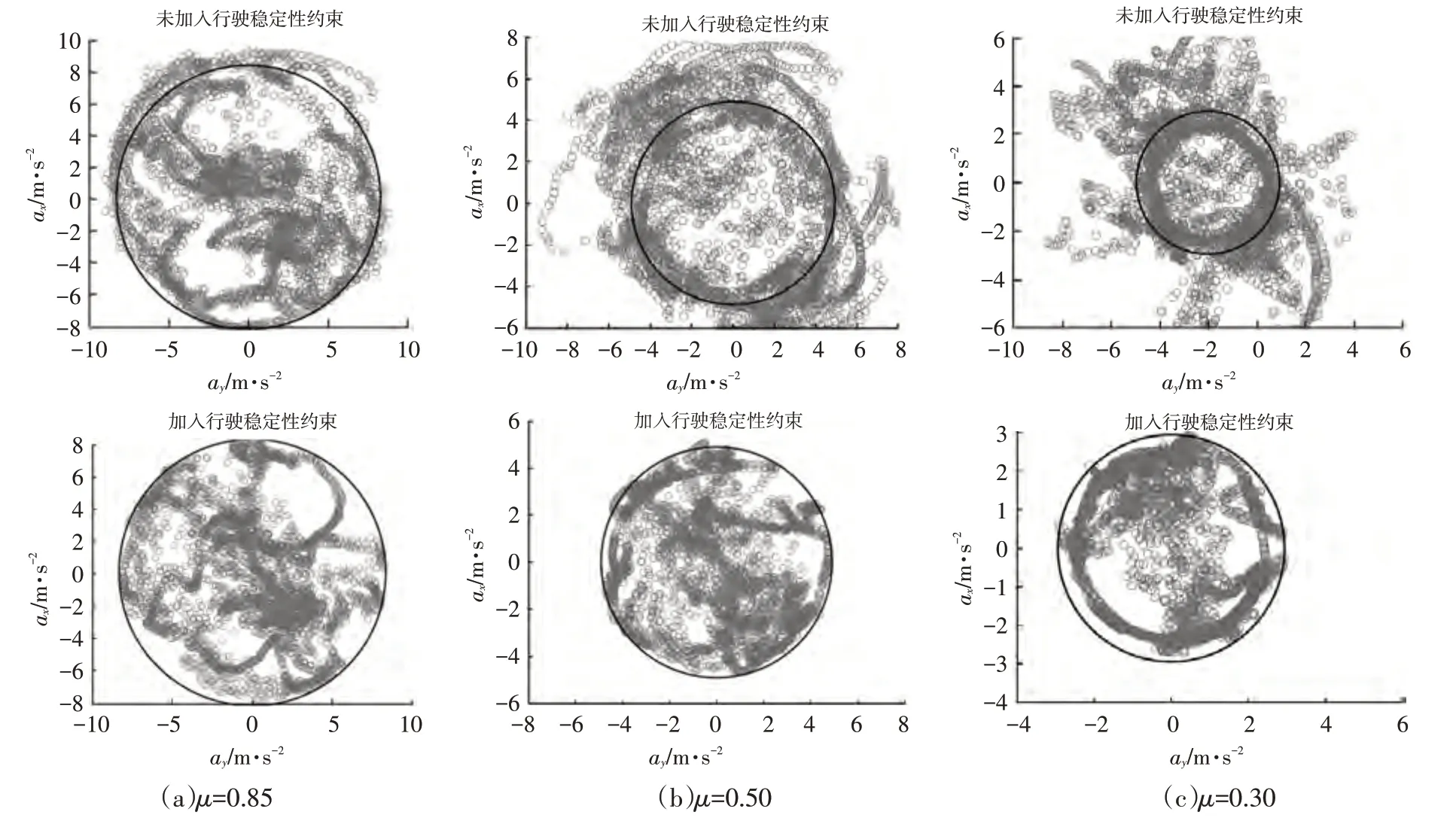
图9 质心加速度aX-aY散点图
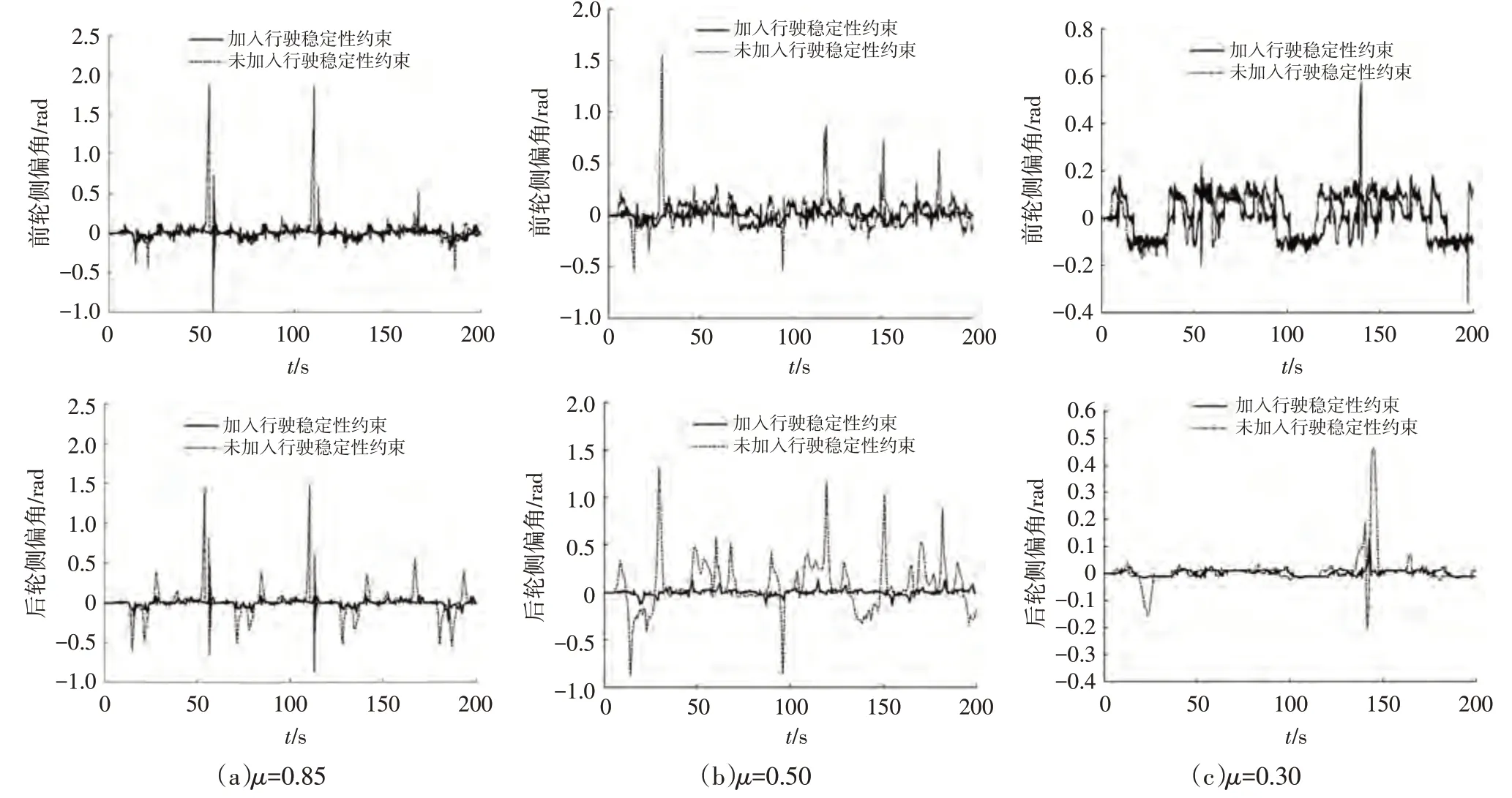
图10 前、后轮侧偏角对比
由图10可看出,在3种路面附着条件下,侧偏角约束使前、后轮侧偏角,尤其是后轮侧偏角大幅减小,避免了前、后轴侧滑的风险,前轮侧偏角总体位于[-0.2,0.2]rad区间内,后轮侧偏角总体位于[-0.1,0.1]rad区间内,符合滑移稳定性约束。设置前轮侧偏角大于后轮侧偏角主要有两方面原因:首先是后轴侧滑会引发更大的危险,车辆容易因甩尾而引发失控;其次是实践中发现,如果前轮侧偏角设置得过小,优化结果不能满足约束条件,难以求解,同时,约束前轮侧偏角会间接约束前轮转角,过大的约束会出现转弯困难的问题。侧偏角在[-0.1,0.1]rad区间时,轮胎侧向力处于线性区域,对结果进行统计分析发现,后轮侧偏角基本位于该区间内,前轮侧偏角90%以上也位于该区间内,侧向力位于线性区域内可减小轮胎模型线性化处理后的精度损失。
对于路径规划算法,求解时间是算法评估的另一个重要指标,算法使用开源求解器HPIPM 求解,算法平均单次二次规划的求解时间为46.4 ms,其求解时间直方图如图11 所示,可知算法在90%以上情况下能在85.5 ms 内给出结果,表明求解时间不会出现较大的波动,算法稳定性良好,且具有较高的计算效率。
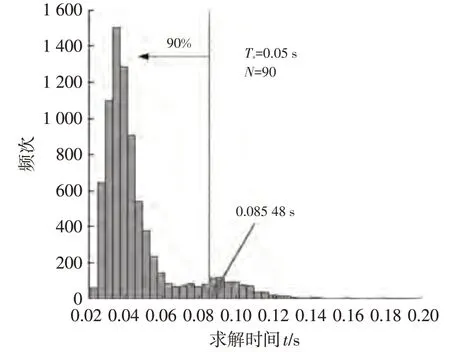
图11 求解时间直方图
4.2 方法对比
为说明本文方法的优势,与2 种不同方法进行对比。首先与传统方法RRT*进行对比,为验证算法在复杂环境下的性能,选取图6 中的1 号U 型弯道进行算法对比,本文方法参数设置与上一节相同,附着系数=0.85,对比结果如图12所示。
由图12可看出,本文算法较RRT*算法规划的路径更加平滑,为进行量化评估,对所规划的路径进行曲率等指标的对比,结果如表2所示。由表2可知,在已知相同赛道信息的情况下,本文算法能以更短的路径驶过更远的中心线距离,表内的通过时间是指车辆在已知速度规划结果的情况下驶完规划路径所需的时间,为进行公平对比,均使用文献[22]所提出的速度规划算法。
表2 数据显示,在规划起始点相同的情况下,本文算法的规划路径更加平滑,数值上表现为最大曲率和平均曲率均较小,因而经过速度规划,算法能够得到更高的平均速度,以更短的时间到达路径的终点。表内的求解时间是算法10 次运行的平均时间,可以看出,在求解时间上RRT*算法比本文算法更具优势,因为本文算法需要求解二次规划问题,且参照序列二次规划(Sequential Quadratic Programming,SQP)算法进行循环优化,本文共进行了5 次迭代优化,平均每次求解时间为25 ms 左右,也符合图11 的分布,算法最终收敛到图12b的结果。
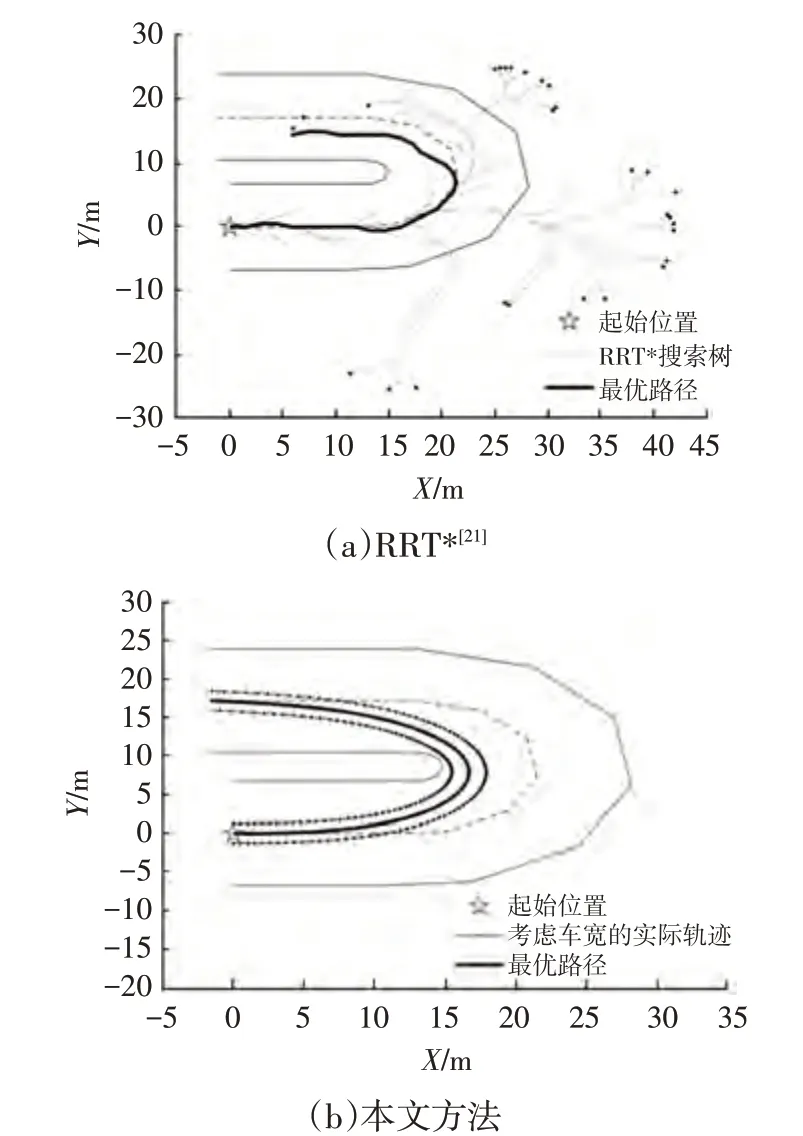
图12 本文算法与RRT*算法的对比结果
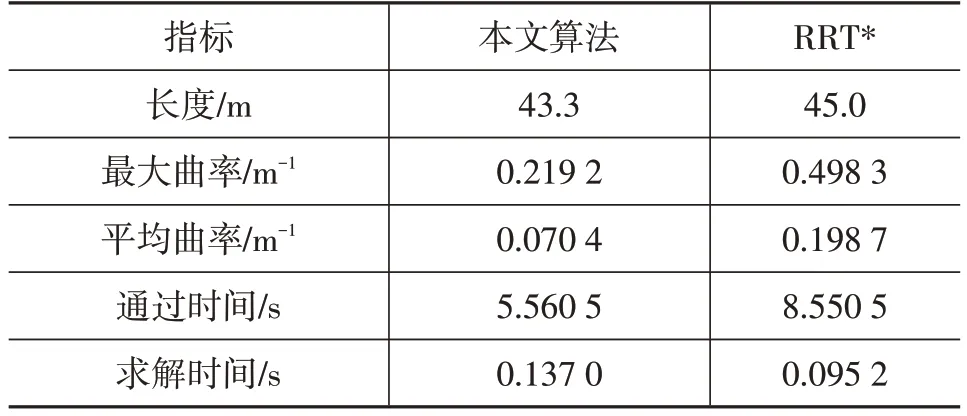
表2 本文算法与RRT*算法规划路径的指标对比
此外,还与同样基于最优化理论的文献[8]所提出的方法进行了对比,结果如图13所示。
图13b 是在CarSim 上利用本文方法得到的实际行驶轨迹,参数设置同上一小节,附着系数=0.85。由图13b 可看出,在多个U 型弯道处,本文算法能够充分利用车辆动力学模型与赛道宽度信息,使赛车转弯半径尽可能大以保持较高的车速。表3显示了2种方法在性能上的差异。
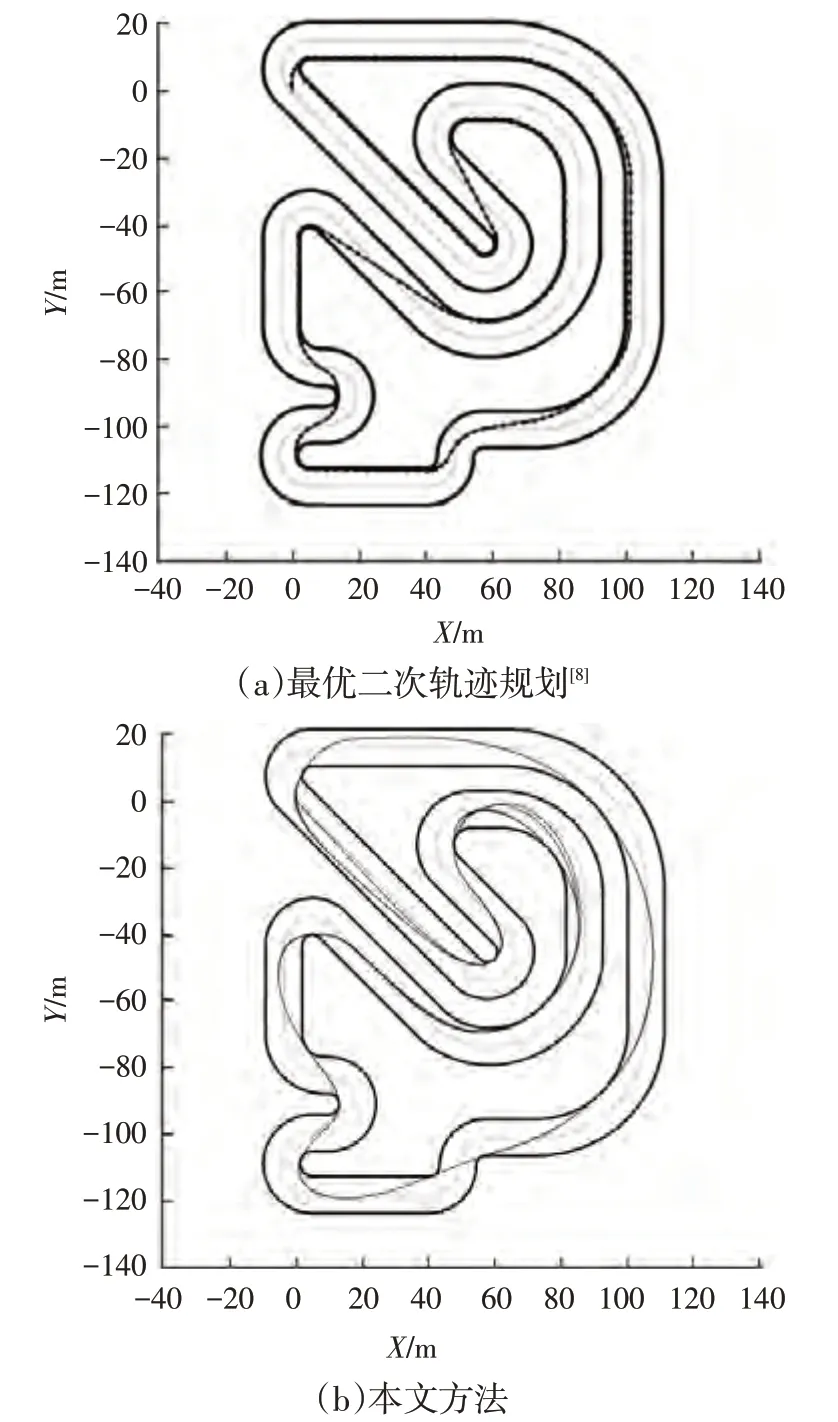
图13 本文算法与文献[8]所提出的方法的对比
表3中的圈速是指车辆通过赛道一圈所用时间,最优二次轨迹规划算法圈速也是经文献[22]的速度规划算法后求得的,为使计算结果更接近真实值,限制规划速度的最大值与本文算法在CarSim仿真过程中能达到的最大值相等。由于所得的圈速只是理论值,所以对比方法的圈速必然比表中的60.747 6 s 长,也比本文算法在仿真过程的实际圈速57.765 2 s长,同时,本文算法在路径曲率上的数据更小,因此更具优势。此外,由于最优二次轨迹规划算法是全局规划的算法,求解时间比本文算法平均单次求解时间要长。
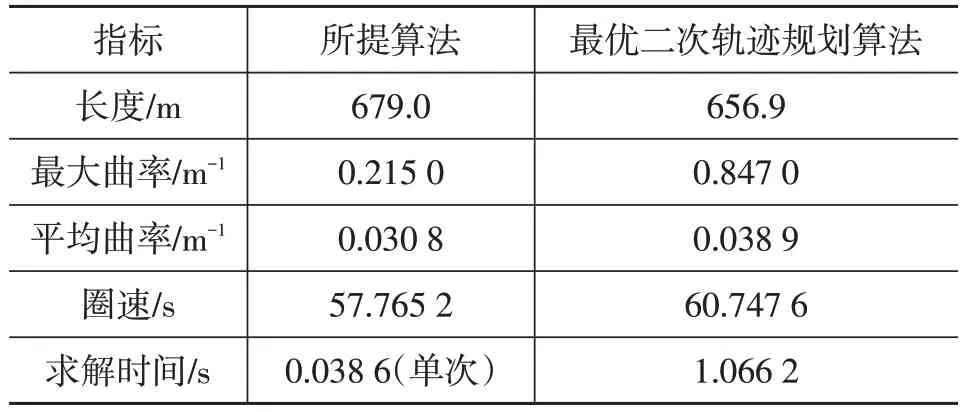
表3 本文算法与文献[8]所提出的方法规划路径的指标对比
5 结束语
本文提出了一种基于预测模型的路径规划算法,充分考虑赛车的行驶稳定性,解决了高速行驶时无人赛车在不同路面附着条件下的路径规划问题。仿真验证结果表明:在不同附着条件下,所提出的算法均能使赛车在赛道内稳定行驶;与未加入稳定性约束的算法相比,该算法可以有效减小车辆前、后轴侧滑的风险,且求解时间能够满足实时性要求;将本文方法与传统方法和基于最优化理论的方法进行对比,结果显示,本文方法在道路曲率、通过时间、圈速上均优于对比方法,证明了其优越性。
