PC104 架构的多信息同步航空电磁收录系统研制*
2022-07-25王言章周险峰王世隆
王言章,王 麒,3,周险峰,王世隆*
(1.地球信息探测仪器教育部重点实验室,长春 130012;2.吉林大学仪器科学与电气工程学院,长春 130012;3.北方自动控制技术研究所,太原 030006)
0 引言
时间域电磁法(time domain electromagnetic method,TEM)近年来被广泛用于复杂地形的地质勘查中。航空TEM 因其机动性强,覆盖范围大,适应能力强等特点,在地质勘查领域发挥着越来越重要的作用。
国内外均有比较成熟的直升机TEM 系统,目前已有多套系统运用于全球地质勘测。比如加拿大的VTEM 系统,该系统中实现了最高50 kHz 带宽的X、Y、Z 3 个空间分量二次场电压的数据收录,采样率为192 kSa/s,同时,该系统在吊舱上悬挂有两个GPS 用以定位当前吊舱位置,但该系统未提及GPS等辅助信息的收录存储。丹麦的SkyTEM 直升机时间域电磁系统发射波形为梯形波或方波,其收录系统利用两块18 位的AD 芯片,实现了5 MSa/s 采样率的电磁数据采集,高采样率收录系统解决了关断时间后采集AD 数据量少的问题,该系统接收传感器有X、Z 两个方向。国内在2012 年研发的CHTEM-I系统,填补了国内直升机TEM 研究的空白,该系统使用NI 公司的采集卡完成航空电磁数据的收录,最高采样率为200 kSa/s,同时将GPS、雷达等辅助类信息也一并进行了收录;二者使用LabVIEW 上位机软件进行数据同步,精度为毫秒级别。中国科学院电子学研究所研制的CAS-HTEM 收录系统采用双通道增益的策略,可以实现6 个通道的数据采集,具备三轴的观测能力。
本文提出一种通过PC104 架构下的数据采集卡和GPS 串口模块实现电磁数据和GPS 辅助信息数据的收录方案,并使用FPGA 芯片,采用异步FIFO、串口流数据字头与边沿检测等关键技术,实现了连续的航空电磁数据与非连续性串行类数据的同步关联。与目前传统的基于NI 公司的数据采集卡设计的航空电磁收录系统相比,实现了整体性能的提升。
1 时间域航空电磁法基本原理
直升机TEM 系统工作原理如图1 所示。首先,整套系统通过发射线圈发射双极性周期性的脉冲电流,包括三角波和梯形波等等。该瞬变电流会产生一次场信号,当地下金属矿物或水资源感应到发射线圈产生的一次场信号时,会从地下开始产生涡流。形成感应二次场,二次场信号呈e 指数衰减的趋势。根据法拉第电磁感应定律

图1 直升机时间域航空电磁法原理图

由于二次场信号呈e 指数衰减,所以接收到的感应电压也为e 指数衰减的形式。当存在变化的磁场时,闭合线圈中会产生变化的电压。所以,接收系统通过接收线圈可以采集到变化的二次场电压信号。
在采集到完整的二次场电压信息后,需要对航空TEM 数据进行抽道处理。由于原始二次场信号为双极性波,所以,首先需要对负极性波根据时间轴进行翻转处理;然后将翻转后的信号进行叠加处理,最后将二次场感应电压的衰减曲线每一个周期内的波形进行分割,并对每个周期的第i 段数据进行绘图,该过程称为抽道。抽道后形成的曲线称为剖面曲线。由于地下高阻低阻异常体会产生不同的感应电压响应,所以根据剖面曲线便可获取地下金属矿产资源的信息,从而达到勘测的目的。
数据采集卡只能采集电压信息,无法将非连续的串口信息与电压信息相同步。这样就大大降低了GPS、雷达等串口信息收录的有效性,使得数据在后期的处理上,无法定位电压信息的地理位置信息,为了保证精确确定地理位置信息,收录系统需要将此刻的GPS 串行信息一同收录。同时,采集卡在采集信号的过程中,并无法向发射系统发出启动指令,发射系统脉冲信号的发出与收录系统信号的接收会产生不同步的现象,在后期数据抽道处理的过程中,无法描述抽道叠加的具体采样点。考虑到航空TEM 发射系统电磁辐射强、干扰大等因素,收录系统在开启采集后,需发出指令完成对发射系统的控制,从而实现同步。
2 系统设计
2.1 数据采集卡的选择
国内CHTEM-I 系统中使用的感应线圈最大带宽可达到71 kHz。且同时考虑到TEM 系统发射电流关断时间短,仅为1 ms~5 ms 的特点,电磁数据的采集需要选择高精度AD 芯片的数据采集卡,并使其采样率尽可能高,这样更有利于完整保留原始二次场电压信号中的信息。
航空TEM 系统为了得到全方位的电磁数据,大多选择多轴线圈完成空间中多个方向的数据收录。假设空间为三维坐标系,则收录系统应收录X、Y、Z 3 个分量的一次场与二次场电压数据,同时,为了观测实时的发射电流变化,方便事后数据处理,应收录发射电流数据,通过以上计算与设计,收录系统数据采集卡模块应至少具有4 个通道,满足同时收录四路电磁数据的需求。
通过计算,以200 kSa/s 采样率,6 个采样通道为例,每秒钟总线中的数据量为3.43 MB,PC104 架构下的32 位的PCIe1.0 总线速率可以达到2.5 GB/s,可将AD 芯片中的数据实时传输给上位机软件。
根据上述计算与分析,本文选用PC104 架构的PCIe104-24DSI6LN 数据采集卡进行航空电磁类数据的收录,该采集卡采用24 位AD 芯片CS5381,采样率可以达到192 kSa/s,满足探测需求。该采集卡拥有6 个差分的采集通道,除此之外,还有同步端(SYNC)与时钟端(CLK)用以采集卡的串联使用,以便完成同系列下多采集卡更多通道的数据采集。数据采集卡部分指标如表1 所示。

表1 PCIe104-24DSI6LN 数据采集卡参数指标
2.2 系统总体设计
依据第1 节对时间域航空电磁法的理论分析和对数据采集卡的性能要求,同时考虑到目前传统的基于PXI 架构的航空电磁收录系统体积大等问题,本节设计了基于PC104 架构下的收录系统总体框图,如图2 所示。

图2 总体系统设计框图
采集卡信号输入端连接接收线圈,通过PCIe总线与PC104 控制器进行连接,完成电磁类数据通讯。GPS、雷达辅助等串口流信息采用UART 通信的方式与FPGA 连接,经过FPGA 对数据进行整合处理后,发送给控制器软件,形成多种数据的共同存储。
基于PC104 架构的时间域航空电磁收录系统如图3 所示。图中左侧是PC104 架构的控制器与采集卡,右侧为FPGA 板卡,用于实现采集卡输出信息通信。串口模块与控制器通信方式为RS232。

图3 基于PC104 架构的时间域航空电磁收录系统
2.3 PC104 架构的收录系统软件平台设计
PC104 架构的收录系统软件平台基于C 语言进行搭建,具体设计框图如下页图4 所示。各部分通过多线程实现CPU 的合理分配与调用。

图4 软件平台搭建
通过对底层驱动中数据采集卡DMA 的传输能力进行测试,得到不同数据量的AD 数据通过DMA进行传输使用的时间与文件存储时间的关系图,如图5 所示。
通过图5 可以看出,当存储时间选择为2 s 时,文件存储所耗费的时间与DMA 传输的时间的占比最低,此时CPU 可分配的资源和空间达到最大,系统最为稳定。但是通过综合考虑到串口流数据的存储等因素,该收录系统的上位机软件文件存储时间选择为1 s。

图5 文件存储时间与调用驱动函数的占比
当数据从底层驱动中以DMA 的方式进行读取时,CPU 内存的分配采用“乒乓操作”的形式进行。当一片缓存区的内存空间被数据写满之后,进行第一片缓存区的队列写入和两片缓存区的转换。采用“乒乓操作”的方法,不仅避免了因上位机软件反复读写底层驱动而带来的CPU 占用率增加,还有效地保证了数据的连续读写。
2.4 电磁数据与辅助信息的同步设计
航空电磁收录系统不仅需要采集高速高精度的航空电磁数据,为了实时确定当前二次场电压信号的时间地点高度等信息,还需要采集GPS 模块、雷达模块等串口模块发送的串口流数据信息。本文的收录系统使用FPGA 对串口流数据信息进行整合,并与数据采集卡采集到的航空电磁数据进行关联。
晶振由FPGA 内部晶振模块统一产生,数据采集卡将CLK 与SYNC 信号输出至FPGA 内部,并使用边沿检测的方式对CLK 信号进行计数;UART接收模块进行串口流数据的接收,并对接收到的数据进行检测,当检测到每一串GPS、雷达高度等串口数据的字头时,系统认定该串字符的有效性,同时记录此时的CLK 计数器的值,并将此值作为该串串口数据的FID 号时间戳,与串口数据一同存储在FPGA 内部的FIFO 模块中,当一串数据发送结束时,FPGA 进行结束字符的检测,同时,将FIFO 模块中存储的串口流数据发送至上位机软件中,实现多信息流串口数据的存储。具体状态转换图如图6所示。

图6 收录系统FPGA 串口信息接收与发送
3 实验测试与结果分析
3.1 实验室测试结果与数据分析
首先使用信号发生器Agilent33500B 输出1 个幅值为1 V,频率为10 Hz 的正弦波,采集到的波形数据如图7 所示。

图7 信号发生器正弦波形数据采集与显示
图7 证明,PC104 架构下的数据采集卡上位机软件使用C 语言的方式,实现了数据的存储。
航空电磁数据与串口流数据信息的关联与同步通过时间戳FID 号的形式,以串口的方式发送给上位机软件。其中,连续5 s 采集到的FID 号时间戳数据如下页表2 所示。

表2 连续5 s 时间内采集的FID 号时间戳
由于GPS 串口流数据自身在发送时会有误差,所以,使用GPS 模块精度更高的PPS 秒脉冲信号进行上升沿的检测,通过对连续两秒串口FID 号进行作差可以计算出,时间戳FID 号的差值为191 996、191 997。计算出系统的最大同步精度为5.2 μs。
由于PC104 采集卡内部控制AD 信号采集的晶振与GPS 模块晶振两者不同源,所以,测试结果与理论差值192 000 有一定的误差。对于收录系统的多信息同步接收而言,考虑到GPS 串行信息的频率仅为1 Hz,所以,这个误差在可接受的范围之内。
3.2 室外实际测试结果与分析
将收录系统的4 个通道分别与空间中不同方向的X、Y、Z 分量接收线圈连接,在接收线圈与数据采集卡之间通过串联放大器进行信号的放大,如图8 所示。开启采集后,进行航空电磁数据的采集与串口流数据的接收。
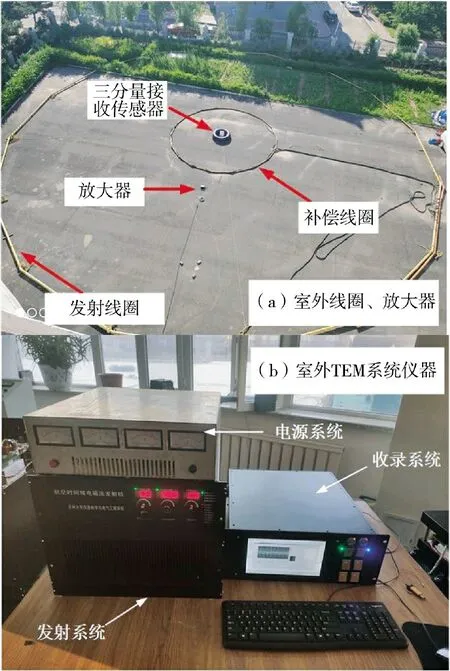
图8 室外收录系统整体测试环境
发射电流的测试通过增加匹配电阻的形式进行,根据电流增益系数,可以得到如图9 所示的发射电流波形图,从图中可以看出,当前发射电流的波形为三角波,峰值电流为210 A,发射电流的周期为0.02 s。
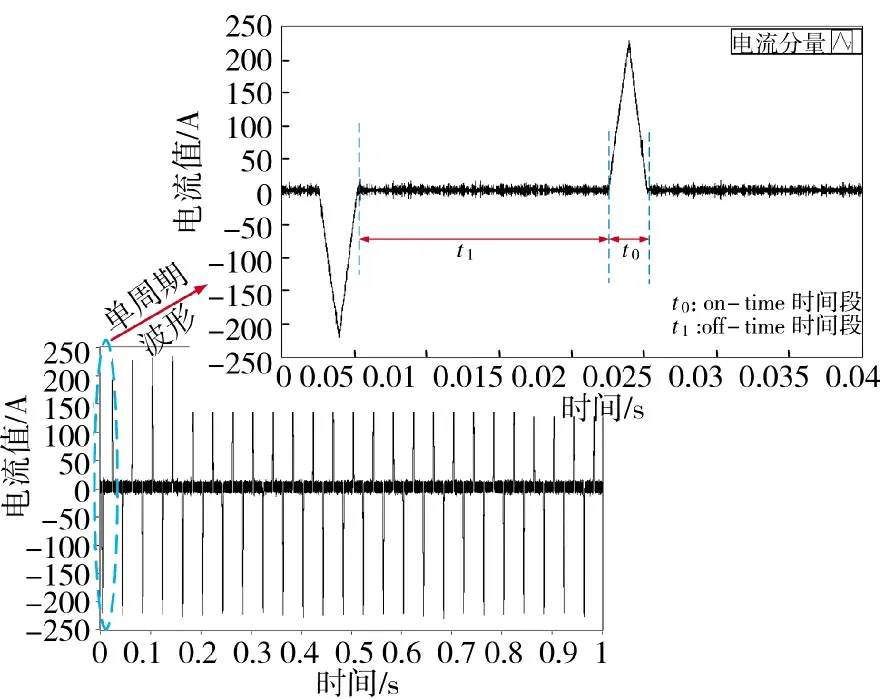
图9 发射电流波形图
图10~图12 分别为X、Y、Z 3 个分量线圈采集到的电压数据波形。接收线圈接收到的除二次场信号之外,还包括发射线圈产生的一次场信号。

图10 收录系统采集X 分量电压波形图

图12 PC104 架构收录系统采集Z 分量电压波形图
系统正常工作时,采用金属类铁材质异常体在接收线圈附近来回走动,对收录到的Z 分量电压信号进行叠加与抽道计算,取连续的75 个周期波形为一组进行电压汉宁窗函数叠加运算,通过对双极性波进行翻转、叠加后,选择电流关断后二次场晚期数据对其进行抽道数据,得到该段异常体的剖面曲线,如下页图13 所示。
图13 中的剖面曲线中,横轴测点表示异常体移动过程中,收录系统工作中的测试点,纵轴表示磁场B 的变化率。通过公式
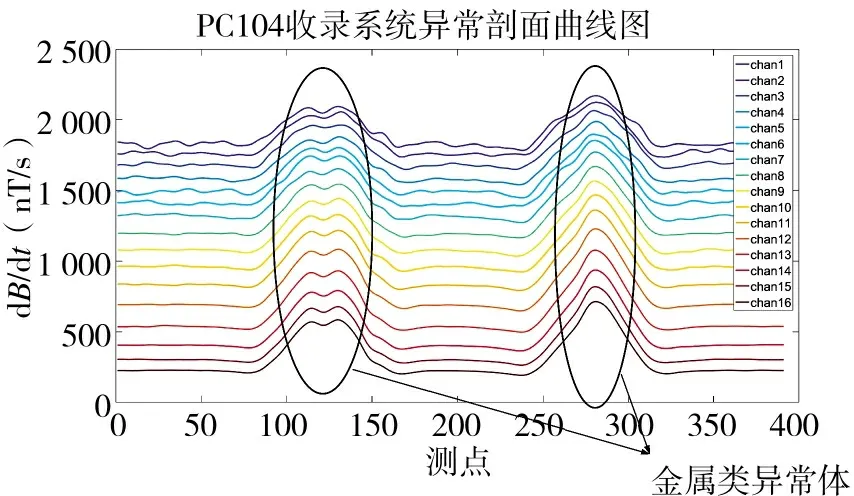
图13 收录系统异常体相应剖面曲线

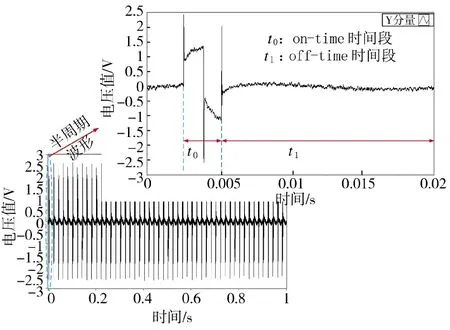
图11 PC104 架构收录系统采集Y 分量电压波形图
计算得出。V 表示收录系统采集到的二次场电压值,n 表示接收线圈的匝数,S 表示接收线圈的面积。 可以看到当铁材质异常体靠近接收线圈时,此时接收线圈感应到异常体存在,二次场晚期信号出现衰减异常,由于金属类异常体相对于地面电阻率低,呈高阻状态,所以剖面曲线图在100~150 测点、250~300 测点之间出现两个向上鼓起的“包”。这两个“包”验证了实验中两次异常体经过接收线圈的过程。磁场的变化率随着抽取道数的推后而增大,在最后一道剖面曲线中能看到明显的变化,磁场变化率的改变也验证了异常体从接近到远离接收线圈的实际实验过程。实验证明,收录系统可收录二次场e 指数衰减的电压信息,且对异常体作出判断。
时间戳FID 号通过串口的形式发送至上位机软件中,通过查询文件中串口类数据的FID 号,可以得到如图14 所示的散点图。图中横轴代表时间,将连续2 s 的FID 号作差,作为纵轴。

图14 秒脉冲测试FID 号作差图
在图14 中,纵轴计算了50 min 中连续2 s PPS秒脉冲的差值。从变化规律可以看出,差值稳定在191 996~191 997 点之间,由于每个CLK 信号的上升沿之差代表的时间为5.2 μs,所以,该收录系统采用FPGA 的方式,将航空电磁数据与串口类辅助信息的绑定精度可以达到5.2 μs。
4 结论
本文设计的基于PC104 架构的时间域航空电磁法同步收录系统,采用24 位AD 芯片的数据采集卡和串口模块,实现了6 个通道下的最高192 kSa/s 采样率的航空电磁数据的收录与GPS 等串口流UART数据的收录。每秒钟的电磁数据量为3.29 MB/s。同时,系统以电磁信号为刻度尺,将两者数据实现了关联,精度达到了5.2 μs。采用该方法,将常规的通用采集卡扩展成了航空电磁领域中专用的收录系统。不论是从电磁信息的收录量还是信息同步精度方面来讲,均优于上一代航空电磁收录系统。可以满足时间域航空电磁收录的需求,在减轻重量与体积的同时,依靠其高可靠性,可以进行无人区等环境恶劣的地质勘测,有着广泛的应用前景。
