一种对高斯脉冲光学盲区实际测量方法的研究
2022-07-22付廷正
付廷正
(北京怡孚和融科技有限公司,北京 100094)
当前,国内多普勒测风激光雷达已经发展数年,几大雷达厂商实现了从无到有的跨越,现今进一步优化激光雷达性能,稳定其品质,提高其精度,显得尤为重要。
脉冲相干式激光雷达自始至终存在一个盲区问题。激光雷达光学部分通常使用脉冲式光纤激光器,能量分布呈近高斯波形。脉冲激光具有一定的宽度,导致出现了近距离探测盲区。盲区值的确定,会直接影响激光雷达对不同高度层风场测量的准确性,进而影响到数据的可靠程度。基于此,研究了一种实用、可靠且精度较高的光学盲区测试方法。
1 光路结构
激光雷达光路结构由激光放大器、光路系统、探测器和信号处理单元等组成。激光器输出的连续光经过分束后,一部分作为参考光输入耦合器用于拍频,另一部分调制成激光脉冲后进行功率放大,通过望远镜扩束发散到大气中。气溶胶的后向散射信号经过望远镜与本振光在耦合器处拍频,经过光电探测器转换成电信号。
在光束的发射与接收上采用了收发同路的结构。光路系统是无实焦基本光学系统,主要是对激光进行扩束,如图1 所示。
2 主要光学参数
激光雷达使用的是一款光纤脉冲激光器,工作波长为1 550 nm,高脉冲能量输出,可达100 μJ。
整体来说,光纤脉冲激光器结构紧凑,性能稳定,易于集成到光学系统中。所探讨的盲区正是由于它的脉冲宽度特性才有的,无法消除,只能通过技术手段降低盲区数值,如减小脉宽等方法。研究暂不对降低盲区的方法做讨论,只讨论盲区测试方法和精度提升。具体使用到的光纤脉冲激光器参数信息,如表1 所示。
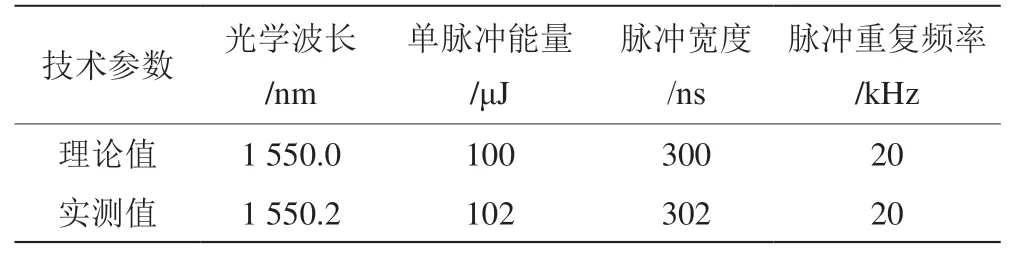
表1 光纤脉冲激光器参数信息表
3 号线条即激光器脉冲输出波形,可见实测脉冲宽度为302.2 ns,波形近似高斯分布,如图2 所示。
3 详细测试过程
3.1 盲区的产生
脉冲宽度与近距离盲区的长短有关。如果脉冲宽度为500 ns,那么盲区距离应该为75 m,是理论上的最小探测高度。在雷达出光后,近端发出去的光无法回收到气溶胶的散射信号即无法完成与本振光的拍频,会出现不可探测区域即盲区。对于激光雷达而言,造成其近端盲区的因素除了光学上的盲区外还有很多,如电学脉冲前后沿和封闭脉冲的延迟、发射时开关余震的影响、采集延迟等,都会扩大近距离盲区实际值[1]。
所谓理论计算的盲区,是把多种干扰因素进行分解,并选取影响最大的因素作为真实盲区的数值。一般而言是比较准确的,但要想将真实的盲区精确到分米级别,只靠理论计算对实际的应用意义有限。
3.2 盲区的测量
对于一款最远探测距离为6 km 的多普勒测风激光雷达来说,它的理论盲区计算为90 m。本文设计了一种简单的方法来测试其盲区的真实数值和理论差值。盲区是因为探测不到近端风场数据,所以基于这个思路进行实验。若将激光雷达直接探测大气,因风场远近基本都是均匀的,只能知道哪个是第一个有效信号,但无法判定第一个有效信号是多远距离产生的,只能粗略认为位置是90 m。所以,决定采用在无风场的区域进行单点模拟风场,查找出现实际信号的点,然后使用卷尺测试该点距离雷达出光口多远,即实际的盲区值。
地点选取了一段长距离走廊,总直线长度为105.8 m。将激光雷达运到场地一端,接上电,调整后机器水平,并调好光路准直,要求出光到100 m 时光斑偏差为10 mm 以内,如图3 所示。
调整好光斑后,需要开始模拟风场,此过程需要2 ~3 人协助完成。使用一台大功率风扇对光斑进行吹风,从0 ~100 m 逐渐移动风扇,然后观察第一个信号值是否出现,操作过程如图4 所示。
在信号发生板的驱动下,AOM 驱动器产生80 MHz的正弦脉冲信号调制连续种子激光产生激光脉冲。零风场的情况下是没有频移的,信号仍为80 MHz。随着风场逐渐远离雷达,出现了有效信号的频移,频移量约为84 MHz。根据频移与风速的换算关系,1 m·s-1的风速会引起1.3 MHz 的频移[2],换算成风速约为3 m·s-1,是风扇风速的值,即该点到雷达的距离即为真实的雷达盲区,如图5 所示。
通过测量此时风点到雷达的实际距离得知,其间隔是96.0 m。本台激光雷达的真实盲区是96.0 m,与理论90.0 m 相差了6.0 m 的距离。
3.3 盲区可信度验证
通过实际测试找到真实盲区是96.0 m,下面进一步分析其可信度,具体采用远距离定点建筑进行验证的方式展开实验[3]。
将设置好实际盲区的激光雷达拉到室外,仍然调好雷达水平角度和出光风向,实验使用了一台分米级精度的外购器件测距仪。通过使用辅助准直红外仪等设备,保证出光位置和测距仪起点完全相同。
将光斑分别打到远端3 个合适距离的建筑物上,并记录好测距仪的数值,分别是219.0 m、222.0 m、225.0 m,如图6 所示。
通过分析载噪比的强反射信号,得到了强反射信号对应的3 个距离值[4-5]。通过利用盲区对横坐标进行反向补偿和换算,发现其盲区值分别是96.6 m、95.2 m、96.4 m,与实际盲区位置分别相差+0.6 m、-0.8 m、+0.4 m。造成误差的原因主要是测距仪的精度和光路打到的点位的偏离而产生,基本符合测试预期,说明盲区值96.0 m 的设定是准确可信的,精度可达到分米级别,如图7 所示。
4 结语
实验过程中,光路精准控制和模拟高精度风场调试过程颇为耗时。比如:在远距离准直光路时,要达到非常精确的目标很困难;模拟风场过程中,要保证风量均匀且以厘米为单位进行精准平移,同时要保证投影到光路上的风场分量尽量一致。通过不断试验调节,终于得到了真实的盲区值,也从反向证明了测试值精准有效。如何缩小理论盲区值与实际盲区值的差异,以及如何更便捷和稳定地测试实际高精度盲区,有待于进一步探索,是今后努力的方向。