基于动态清空距离的特殊车辆与CAVs 混合车道控制*
2022-07-20庞明宝
赵 欣 庞明宝
(河北工业大学土木与交通学院 天津 300400)
0 引 言
救护车和消防车等应急车辆的畅通和公交车等优先级车辆的通行是道路交通管理的基本内容[1-2],许多相关控制方法已得到具体工程应用,如针对公交优先的专用道设置方法[3-4]、应急通道设置,以及管控措施[5-6]等。这些方法在一定程度上实现了特殊车辆的优先通行,但也存在一定弊端。一方面,专用道的设置使其他车辆可用道路空间减少,在交通需求较高时会加剧道路拥堵[7];另一方面,强制换道等控制措施受到技术手段限制,实施难度大且效果有限[8]。因此,如何解决这些问题是提高道路交通管理能力的关键之一。
智能网联车(connected and automated vehicles,CAVs)能通过信息交互实现精细化和动态化的车道管理策略,为提高道路通行能力、多优先级车辆综合控制提供了技术支持[9-10]。但CAVs的发展不是一蹴而就的,Litman[11]指出人工车辆(human-driven vehicles,HVs)与CAVs构成的混行交通将在未来较长时间存在。在混行交通中,受HVs的干扰,特殊车辆优先通行在很多情况下无法得到保障[12]。对此,赵鑫[13]和Winsor[14]提出设置专用车道方法来排除HVs的干扰;Xiao等[15]、刘悠冉[16]和Levin等[17]则改造已有专用道,在不影响特殊车辆通行的前提下允许部分CAVs进入专用道行驶。这些方法既保证了特殊车辆的优先通行,又提高了专用道的空间利用效率。然而,已有研究集中在保障公交优先通行的车道控制方法,特别是公交专用道控制方法上,不涉及应急车辆的优先通行,且大部分研究基于整条路段进行车辆控制,存在一定空间局限性[18]。
清空距离是车道控制方法中保障特殊车辆优先通行、扩大空间适用范围的关键参数[18]。Zyryanov等[19]指出已有的公交专用道控制策略研究经常忽略私家车流量、公交发车频率和清空距离部署长度对道路整体通行能力及车速提升的影响,但三者的不同组合会获得不同的实施效果。对此,Wu等[20]针对公交专用道的不同静态清空距离长度在不同交通条件下的控制效果展开了研究,获得了静态清空距离长度与车流量等交通条件的最佳组合;Ma等[21]进一步将道路划分为多段长度相等的静态清空区域,通过组合不同数量的清空区域,在保障公交优先基础上提高了专用道的空间利用率。但在道路混合交通中,Rau等[22]发现静态清空距离受到其特性和适用范围限制,仍然存在车道闲置空间过长或无法完全清除特殊车辆下游干扰车辆的局限性。为了克服这些限制,Xie等[23]提出在公交专用道上设置动态清空距离的方案,扩大了清空距离的适用范围。宋现敏等[24]提出了1 种公交专用道的动态清空距离确定方法,根据公交车到达状态和排队长度动态决策清空距离,有效提高了公交专用道的空间利用率。然而,考虑到应急车辆不受信号控制和高优先级等特点,现有动态清空距离模型和设置方案不能直接应用于应急车辆优先通行控制中。
综上所述,目前国内外相关研究多集中于公交专用道的控制方法,仅强调公交车等一般优先级车辆在空间上的车道控制策略,较少有对应急车辆优先通行问题的讨论,尤其忽略了应急车辆与公交车等混合行驶时控制策略的动态决策。在车道清空控制方面,现有研究大部分通过仿真实验设置静态的清空距离,不仅无法满足多优先级特殊车辆的通行需求,还存在适用范围有限的局限性。少数关于动态清空距离的研究也未考虑与CAVs 准入准出规则和交叉口预测排队过程的联合优化,在通勤高峰时段可能因“特殊车辆进入路段时,车道下游阻碍车辆已积累过多”,使特殊车辆优先无法得到保障。
基于此,设置多优先级特殊车辆与CAVs混合使用的专用车道,或改造已有公交车道为该专用车道;建立专用车道上“随特殊车辆优先级和预测排队状态变化而进行动态决策”的动态清空距离模型。同时,建立车辆换道决策控制模型,提出专用车道控制策略,通过仿真实验予以验证。
1 动态清空距离模型
1.1 研究对象
以图1所示的4车道城市道路为研究对象,对相邻交叉口之间路段中正常行驶的车辆进行控制。其中,最外侧车道为仅允许特殊车辆与CAVs使用的专用车道,其他3条车道供HVs和CAVs行驶。行驶车辆分为HVs、一般CAVs 和特殊车辆(配备智能网联车设备),其中特殊车辆包括应急车辆(如消防车、救护车等)和一般优先级车辆(如公交车等)。CAVs之间能够通过信息交互获得道路实时交通信息。
在该专用车道内,特殊车辆的优先通行通过动态清空距离的激活来实现,见图1。当专用车道无特殊车辆行驶时,CAVs 在自由行驶;当特殊车辆进入本路段专用车道时,根据特殊车辆到达状态和交叉口排队预测状态激活动态清空距离,向该清空距离范围内的CAVs 发送换道信号,同时禁止其他车道CAVs进入清空距离范围。
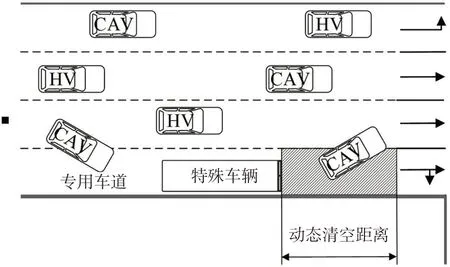
图1 动态清空距离示意图Fig.1 Dynamic clear distance diagram
动态清空距离的激活长度对专用车道利用率和特殊车辆优先通行有着重要的影响[24],清空距离过长会导致下游路段车道长时间空置,造成专用车道整体利用率降低;清空距离过短则无法完全排除下游CAVs的干扰,造成特殊车辆延误。
1.2 交叉口排队预测
基于下游交叉口信号配时方案和CAVs 共享信息的动态队列预测模型可以获得在第n个信号周期内交叉口j的最大排队长度和其队列末端开始消散时间,见式(1)~(3)。

特殊车辆到达下游交叉口的状态见图2,点A和点B分别表示特殊车辆加入排队队列和从队列中开始消散的位置。特殊车辆的到达状态见式(4)~(5)。
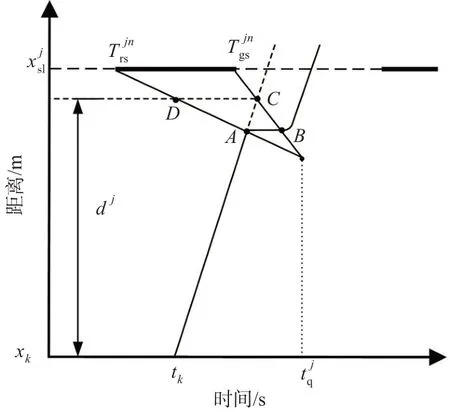
图2 特殊车辆到达交叉口状态Fig.2 Arrival status of special vehicles at intersection

式(4)表示车辆在畅通情况下保持原速度到达交叉口;式(5)表示车辆保持原速度加入交叉口处的排队队列。
为保障特殊车辆优先通行,应优化排队过程,使预测队列中妨碍特殊车辆行驶的CAVs 提前换道至其他车道,减少排队队列的长度,排队优化后特殊车辆不停车从队列中释放的临界时间和对应的无干扰队列临界加入时间为

1.3 动态清空距离确定
为符合实际道路条件和安全性保障,动态清空距离的长度约束见式(8)~(9)。
式中:dj为交叉口j上游路段的动态清空距离长度,m;dmin为最小安全车间距,m。
1.3.1 应急车辆清空距离
在确保安全的前提下,应急车辆不受信号灯限制,在红灯时仍拥有交叉口通行权,且尽量避免速度损失。因此,动态清空距离的激活长度仅与特殊车辆在交叉口的排队优化过程相关。由此,应急车辆到达交叉口时的排队状态可分为以下3种场景。
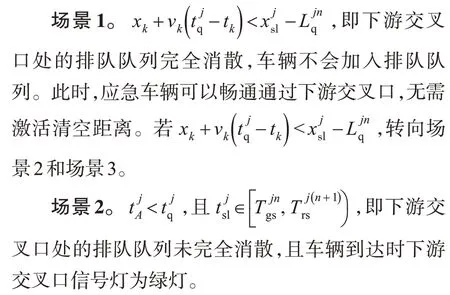
由于到达交叉口时信号灯为绿灯,下游排队队列能够随着时间增长消散,存在1 个可行的清空距离能够使应急车辆在绿灯时间内通过交叉口,见式(10)。

由于应急车辆能够在红灯通过交叉口,需要将其下游车道到交叉口这一段距离的CAVs清空,获得畅通的紧急通行通道,见式(11)。

1.3.2 一般优先级车辆清空距离
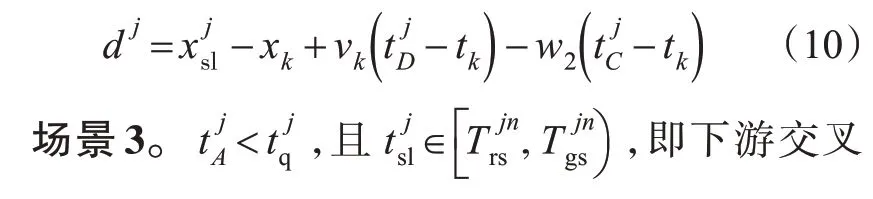
一般优先级车辆受到信号灯控制,其获得的空间优先通行权仅在相邻交叉口之间的路段中体现。其优先通行需求不仅要满足自身优先通行,还要实现与非优先车辆之间的需求平衡。因此,根据其到达下游交叉口的信号状态和交叉口预测排队长度,要求动态清空距离适用于以下3种场景。
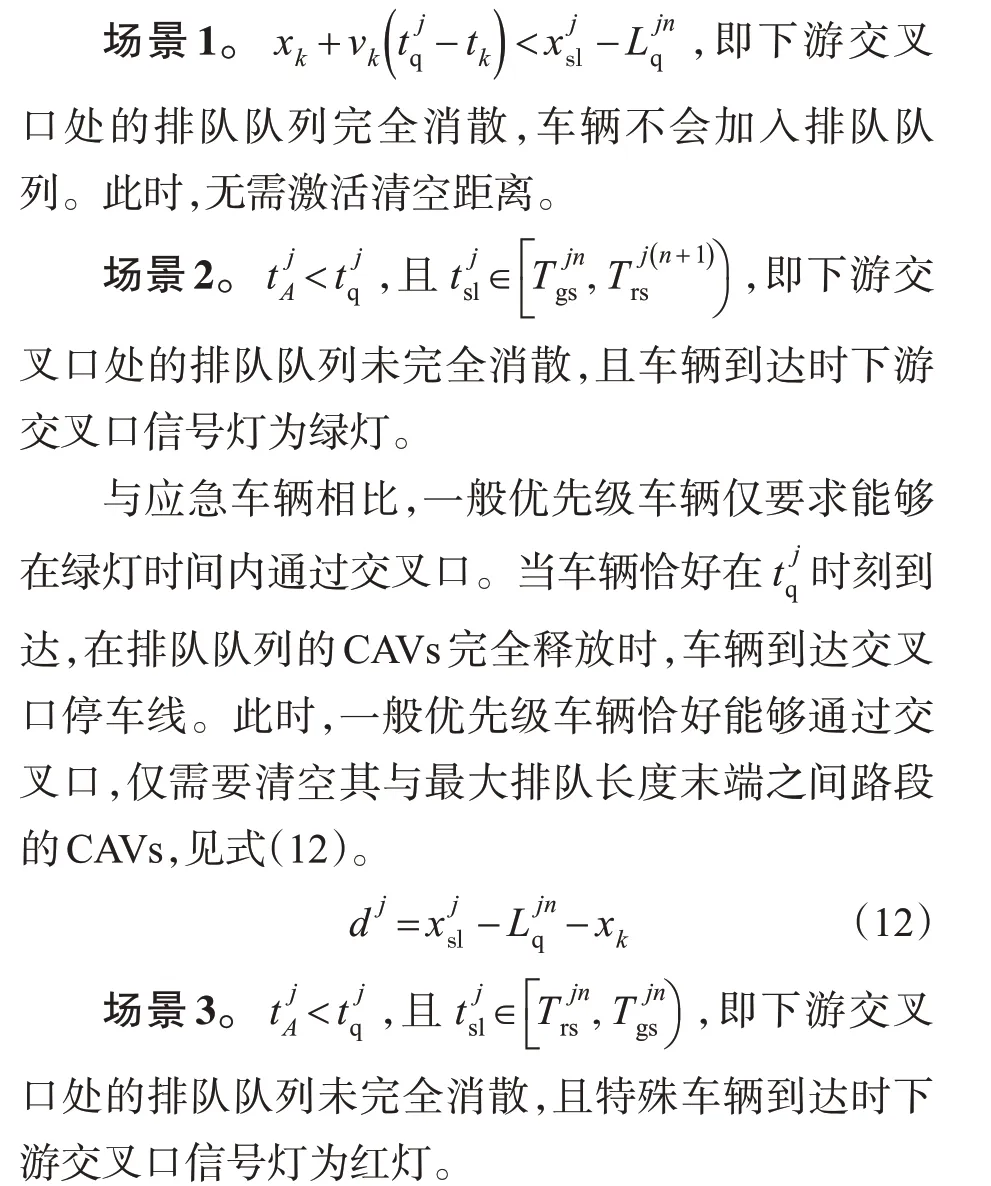
一般优先级车辆不会在红灯时间内通过交叉口,而是排队等待下1 个信号周期的绿灯开始。它的优先通行通过满足其在下1信号周期绿灯时间通过交叉口的需求来保障,此时动态清空距离的长度见式(13)。

式中:vd为车辆期望运营速度,m/s。
2 专用车道控制策略
2.1 控制流程
系统控制流程见图3。
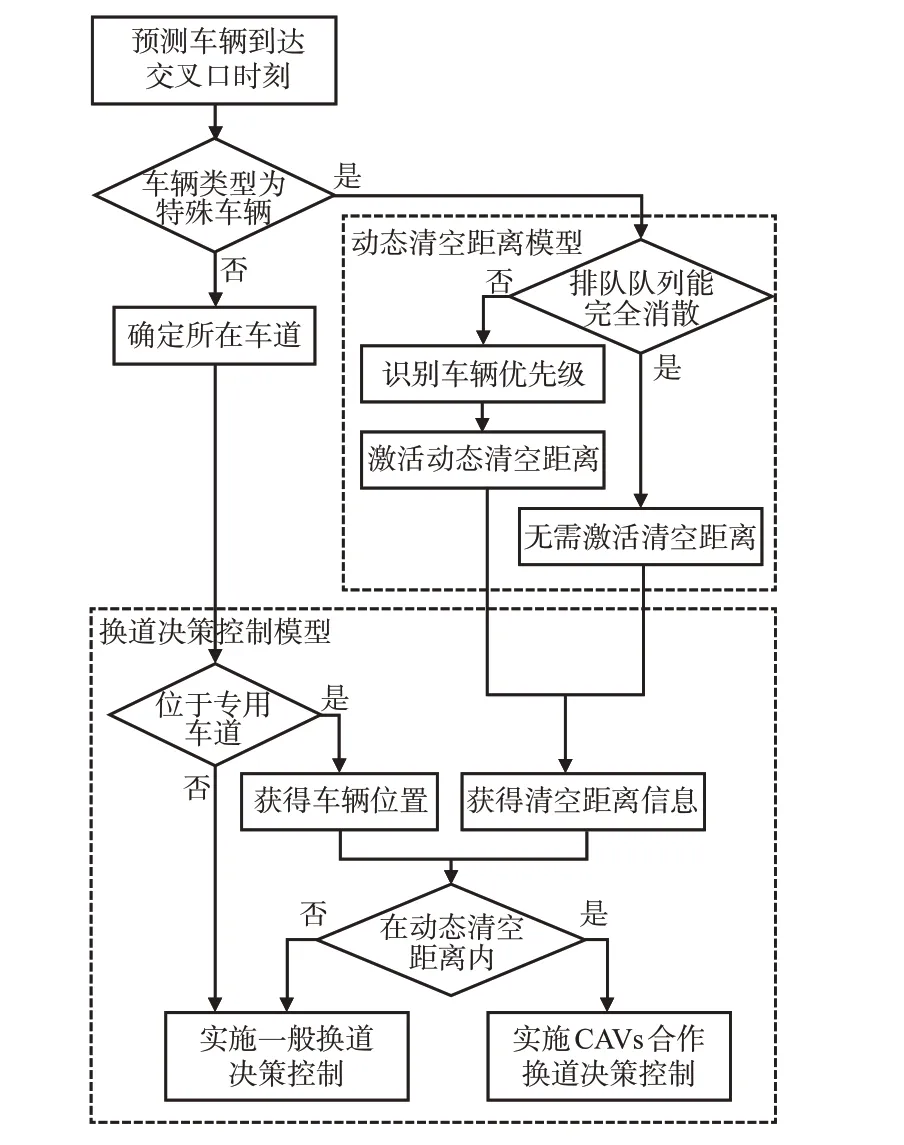
图3 混合车道动态控制流程图Fig.3 Dynamic control flow chart of hybrid lane
在实际道路交通中,特殊车辆的到达状态和道路交通情况是动态变化的。因此,特殊车辆与CAVs混合车道控制策略应根据实时交通情况进行动态决策。
车辆为特殊车辆时,若下游交叉口排队队列能完全消散,可知无需激活动态清空距离;否则根据车辆优先级激活动态清空距离,将换道信号发送至清空距离内的CAVs。
车辆为一般CAVs时,根据其所在车道位置和动态清空距离激活情况实施不同的换道决策控制策略。
2.2 换道决策控制模型
2.2.1 一般换道决策控制
HVs 和清空距离之外的CAVs 的换道行为需要满足一般换道决策控制的换道动机和换道安全条件要求。一般换道决策控制方法采用Chowdhury等[25]提出的换道规则和Nie 等[26]提出的基于激励的候选换道决策模型作为研究的基础,约束其每个时间步长至多换道1次。换道动机为换道后车道行驶条件比当前车道更优,见式(14)~(16)。
式(16)中车辆的换道收益既包括车辆换道后的优势,又包括由礼让系数决定的目标车道上跟随车辆的影响[26]。考虑相邻普通车道存在CAVs 与HVs混行的情况,为保障专用车道的CAVs 换道安全,在相邻车道跟随车辆为HVs 时礼让系数取1,并向相邻车道其他跟随车辆(候补车辆)进行换道决策。
换道安全条件为换道时不会对目标车道上的后车产生影响且保持安全间隙,见式(17)~(18)。
2.2.2 CAVs合作换道决策控制

该专用车道上的CAVs 换道决策受到动态清空距离的影响,若CAVs 在清空距离内行驶,需要及时换道为特殊车辆提供安全畅通的通行空间。其换道动机见式(19)。为提高换道效率,在CAVs接收到换道信号后实施CAVs合作换道决策控制,采用相邻车道前车加速与后车减速相结合的方式为换道车辆提供空间,可以一定程度上减少相邻车道车辆的速度损失[27]。由此提供的换道空间为
式中:daf和dar分别为相邻车道前车加速提供的换道空间长度和后车减速提供的换道空间长度,m;为第k时刻相邻车道前车的前车位置,m。
通过合作控制,相邻车道前车速度vafa和后车速度vard为
式中:b为车辆减速度,m/s2;Δt为车辆速度优化过程时长,s。
3 仿真方案设计
3.1 实验对象
本文以以南开大学附属医院与天津市西北角地铁站之间2 534 m的单向4车道路段为实验对象,其中最外侧车道为专用车道,信号灯不限制车辆右转。通过微观交通仿真软件SUMO建立仿真道路模型,见图4。

图4 实验区域示意图Fig.4 Schematic of the experimental area
3.2 仿真实验方案及参数设定
为验证本文控制策略的有效性,设计3 组仿真实验进行对比。
策略1。设置特殊车辆与CAVs 混合使用的专用车道,但不考虑特殊车辆优先通行。
策略2。设置特殊车辆与CAVs 混合使用的专用车道,采用间歇式公交专用道(intermittent bus lane,IBL)控制方法设置清空距离,即特殊车辆进入该路段后,向该路段专用道内所有CAVs发送换道信号,清空专用道。
策略3。本文所提基于动态清空距离的特殊车辆与CAVs混合车道控制方法。
为了体现智能网联环境下车辆位置和速度的可知性,CAVs 和特殊车辆的驾驶模型采用CACC(cooperative adaptive cruise control)模型,HVs 的驾驶模型采用IDM(intelligent driver model)模型。设置应急车辆和公交车的期望速度分别为16.6 m/s和9.7 m/s,非特殊车辆最大限速为12.5 m/s,非特殊车辆的加速度和减速度分别为4 m/s2和4.5 m/s2。特殊车辆和非特殊车辆的车长分别为10 m 和4 m,最小安全车间距为5 m。
设置仿真时长为4 200 s,前600 s时间为预热时间,道路通行能力c为1 200 pcu/h。非特殊车辆的车流量分别为[0.1,0.2,0.3,…,0.8]×c,特殊车辆的车流量为120 pcu/h,单位时间步长为1 s。结合参考文献[20],[21]和[24]中所选取的模型评价指标,本文最终选择特殊车辆车均延误时间、整体车均及人均出行时间、车道交通量变化情况以及CAVs渗透率影响情况共5 个指标作为这3 种策略的仿真评价指标。同时为了消除随机性引起的误差,结果取5 次仿真实验的平均值。
3.3 仿真结果及分析
3.3.1 特殊车辆车均延误时间
特殊车辆车均延误时间的对比见图5。由于实施了特殊车辆优先策略,策略2和策略3的特殊车辆车均延误时间相比策略1明显减少。

图5 特殊车辆车均延误时间Fig.5 Average vehicle delay time of special vehicles
策略3 则能够通过设置车道清空距离和CAVs合作换道决策控制,避免出现特殊车辆通行受阻的情况。与其他2种策略相比,策略3的特殊车辆车均延误时间更短。在道路总交通流量较低(480,960,1 440 pcu/h)时,与策略1 和策略2 相比,策略3 的特殊车辆车均延误时间分别减少61.5%和41.8%。在道路总交通流量高于1 920 pcu/h 时,策略3 的特殊车辆车均延误时间比策略1降低59.6%以上,且该差距随着道路总交通流量的增加明显增大;比策略2降低13.5%,但差距逐渐减小。
3.3.2 道路整体车均、人均出行时间
整体车均出行时间和人均出行时间见图6~7。
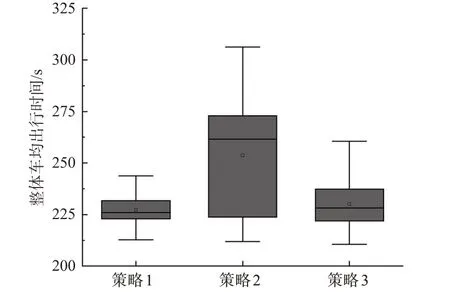
图6 整体车均出行时间Fig.6 Average vehicle travel time
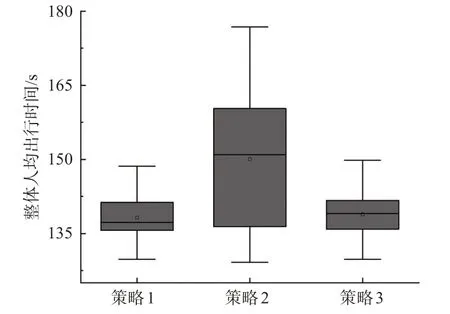
图7 整体人均出行时间Fig.7 Per capita travel time
策略1的整体车均出行时间和人均出行时间明显高于其他2种策略,这是由于策略2应用了IBL控制方法,特殊车辆较高的到达频率使专用车道对CAVs 的开放时间减少。本文提出的策略3 由于激活的动态清空距离较短,与策略2相比,车均出行时间和人均出行时间分别减少16.7%和14.6%。对比3种策略的出行时间中位数,与策略1 相比,策略2 和策略3 因考虑特殊车辆优先导致出行时间增长,其中策略2的人均出行时间较策略1增长幅度明显,且数值波动较大,显示了在特殊车辆到达频率较高时的不适用性;策略3 较策略1 数值变化幅度较小,车均和人均出行时间的增长幅度分别为3.9%和2.8%,既满足了特殊车辆优先功能也保持了设置专用道的优势。
3.3.3 单车道交通量
专用车道和普通车道交通量的对比见图8和图9。由于策略1只允许特殊车辆和CAVs进入专用道而不考虑特殊车辆优先,各车道交通量区别较小且随着道路总交通量的增加而变化,呈现图中接近线性关系。因特殊车辆到达频率较高导致专用道空置时间过长,策略2的专用道交通量保持着较低的水平,其他3条普通车道的交通压力增大,在道路总交通量为3 840 pcu/h时,普通车道已经饱和,将造成严重拥堵。
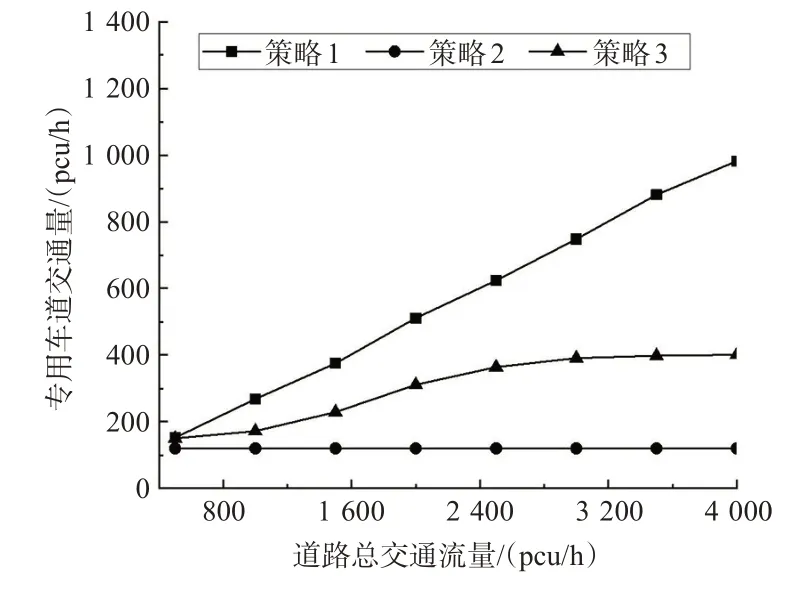
图8 专用车道交通量Fig.8 Traffic flow of the dedicated lane
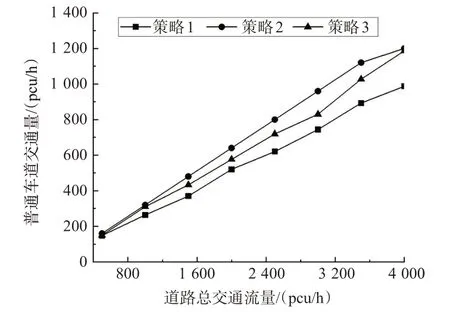
图9 普通车道交通量Fig.9 Traffic flow of the normal road lane
从整体分析,本文提出的策略3 能在保障特殊车辆优先通行的情况下,提高专用车道的利用率,一定程度上缓解其他车道的交通压力。其中,在交通量小于960 pcu/h 时,策略3 的专用车道交通量增长幅度平缓,与策略2 相比仅增加了28~32 pcu/h,且策略3 的普通车道交通量与策略2 趋同。这是由于实施了动态清空距离,社会车辆获得了部分车道使用空间,但此时道路空间充足,社会车辆使用专用车道的意向不强;在中等交通量水平的情况(1 920 ,2 400,2 880 pcu/h)下,此时道路车均可用空间逐渐减少,社会车辆为提高自身通行效率,更多的利用专用车道空间,减少了普通车道的交通压力,使策略3的专用车道交通量增长速度提高,普通车道交通量与策略2 相比减少。当交通量大于3 360 pcu/h 时,受到动态清空距离的限制,准许使用专用车道的社会车辆数已接近饱和,不允许更多车辆进入专用车道。此时专用车道的交通量保持稳定,与策略2 相比增加了271~286 pcu/h,普通车道的交通量提升,但与策略2相比更晚达到饱和状态。
3.3.4 CAVs渗透率影响
为了得到设置本文提出的专用车道的临界条件,对比分析CAVs渗透率影响情况,见图10。在考虑特殊车辆优先通行的设置条件下,对比策略2 和策略3的整体车均延误时间变化情况。从总体趋势来看,本文提出的策略3 在提升道路通行能力方面明显比策略2的实施效果优秀。
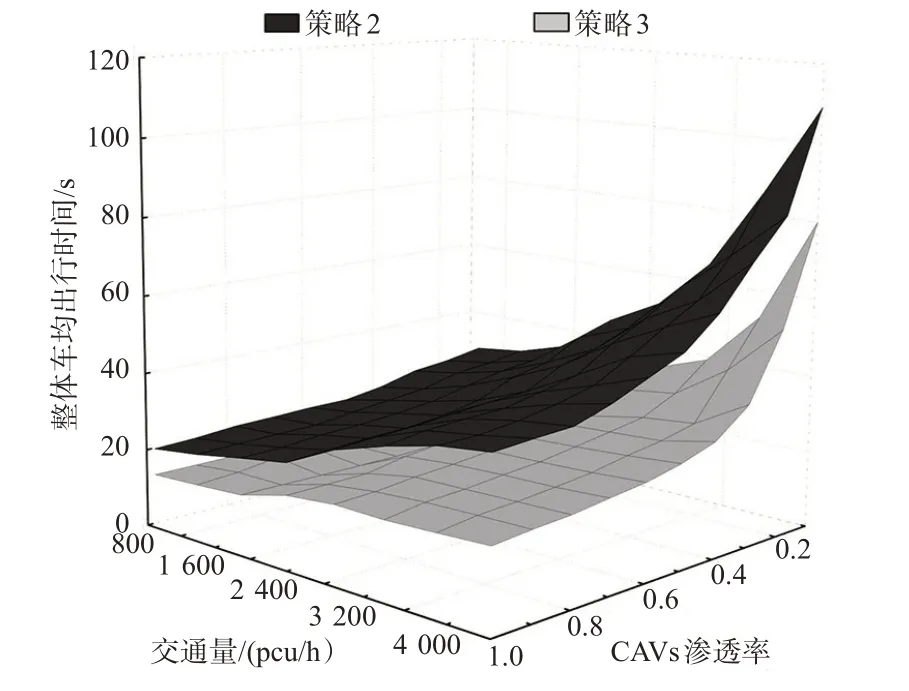
图10 道路整体车均延误时间Fig.10 The average vehicle delay time
在交通量水平较低的情况(480,960,1 440 pcu/h)下,此时道路空间充足,CAVs 渗透率变化对策略3的影响极小;在中等交通量水平的情况(1 920,2 400,2 880 pcu/h)下,策略3的车均延误时间随着CAVs 渗透率的减小呈现较为明显的增长趋势。当交通量大于3 360 pcu/h 时,受车道容量限制和换道行为影响,当渗透率达到0.4 时,专用车道接近饱和状态,道路整体CAVs数量的增长对专用道内可容纳的CAVs数量的影响极小。由此可知,在CAVs渗透率高于0.4时设置特殊车辆与CAVs混合使用的专用车道能获得最佳控制效果。
4 结束语
笔者提出的特殊车辆与CAVs 混合专用车道控制方法分析了不同优先级特殊车辆的通行需求,能够综合考虑应急车辆畅通、一般优先级车辆优先通行和一般CAVs 行驶,减少特殊车辆延误,提高道路通行能力。并且,在为特殊车辆提供清空距离的过程中能够实现动态决策。相比常规专用道优先控制策略降低了车均和人均出行时间,提高了专用车道的利用率,体现了智能网联环境中的精细化控制和整体优化控制思想。虽然提出的方法受限于CAVs渗透率,在低渗透率下的实施效果并不十分理想,但是相比传统专用道优先控制方法,车均延误时间相对较少,能够缓解交通拥堵问题并提高道路整体通行效率。
通过设置基于动态清空距离的特殊车辆与CAVs混合车道,在特殊车辆空间优先方面取得了一定成果。但交叉口信号灯采用固定的配时方案,与实际交通运营环境存在一定差异;动态清空距离模型无法控制已排队车辆的不足也需通过与交叉口信号优化方法的协同控制进行弥补。因此,后续将考虑交叉口信号优先控制方法,进一步讨论特殊车辆的时空间优先协同控制策略,减少单一控制策略的局限性,为具体交通控制和管理提供工程指导。
