考虑连锁冲突的城市公交车行车风险量化分析方法*
2022-07-20李熙莹梁靖茹郝腾龙
李熙莹 梁靖茹 郝腾龙
(1.中山大学智能工程学院 广州 510006;2.中山大学广东省智能交通系统重点实验室 广州 510006;3.中山大学视频图像智能分析与应用技术公安部重点实验室 广州 510006)
0 引 言
随着城市化发展,城市主干道及快速路承担着巨大的交通压力,在交通量增加的同时也伴随着安全风险的攀升。公共交通线路也往往规划在此类路段,由于公交车车型大、与其他车辆运动差异大,机动车混行会对稳定车流造成不同程度的扰动,带来额外的车辆运行安全风险[1-2]。因此,深入且定量的交通安全风险研究能够作为大型公交车风险管理的理论依据,支撑公交线路避险、公交专用道设置等措施的制定。
大型车辆与小汽车在同车道行驶的混合交通安全风险一直是道路交通关注的重点,例如,赵笑月等[3]在高速公路场景研究了大车混入率对严重冲突率的影响。公交车作为城市普遍存在的1 种大型车,与其他的大型车辆行车特性存在明显差异。陈峻等[4]量化研究了城市公交车对社会车辆行车速度的影响。盖靖元[5]验证了混合车流中的冲突与车速离散有着极大关联,其中,公交车不仅自身车速差异化,同时影响区域内其他车辆的速度稳定性,极大增加了交通安全风险。
随着交通数据精度的提升,研究通过识别交通冲突度量公交车在混合机动车中的风险系数。例如,Goh 等[6-7]为了研究公交优先策略是否能降低公交行车风险,通过微观仿真的方法计算公交车的冲突频次等指标研究不同状态下的安全风险,并通过公交风险分析公交专用道的必要性,结果表明公交车与小汽车分离避免了公交车在交通流中的速度波动影响,减少了大部分追尾及侧撞冲突。Qi等[8]和Bansal等[9]基于碰撞时间研究了公交站附近混合车流的交通冲突统计分布,估计区域内的交通安全风险,该研究旨分析公交冲突的空间分布。另外,Diah 等[10]还研究了获取公交车冲突数据的交通视频监控技术。
交通冲突技术[11]主要利用时间空间度量指标判别冲突,包括碰撞时间(time to collision,TTC)[12]、后侵入时间(post encroachment time,PET)[13]及碰撞时间差(time difference to collision,TDTC)[14]等。谢济铭等[12]采用扩展TTC进行多车道交织区跟驰行为中的风险判别;Qi 等[13]利用改进的PET 预测合流区的车辆变道冲突。由于大型公交车随出入站变道时会形成更多冲突,经典TTC 模型难以直接应用在车辆变道、转向行为,需要扩展异车道冲突的建模;PET模型忽略了车辆实时速度的影响,属于冲突事后指标,公交车与小汽车速度差异较大,不考虑实时速度的模型无法对冲突过程进行预测;TDTC 模型结合了前2种方法,但所需数据精度要求较高,在应用中易存在偏差。因此,对于大型公交车与小汽车之间的交通冲突,需要结合具体的应用场景对经典冲突模型进行改进。
目前交通冲突技术大多研究单一车辆主体的冲突识别方法及风险预测。朱顺应等[11]提出,非自由流中的交通冲突存在“区域连锁”效应,一对交通主体发生冲突后,后者采取的避险行为往往会影响到其他临近车辆的行驶;交通事故链的研究[15]指出识别连续性碰撞风险能够为阻断多车事故提供基础。尤其对于大型公交车来说,长车型和运动差异易干扰周围区域内多辆车而间接造成多个交通冲突,形成连续性安全风险。多个交通主体连锁冲突使得部分车辆避险困难,行驶路径不稳定,且区域内车辆行驶速度与方向的差异性极易使得冲突解除后形成再次冲突,造成的安全风险不断增加。目前有部分研究关注到多个交通主体的聚集性风险分析,例如,容颖等[16]对双车道公路划分车辆群,提出了车辆群风险度量模型,快速定位高风险的车辆群体;梁军等[17]和杨澜等[18]通过建立车辆状态网络识别交通事故链,在车联网环境下预警每个车辆的潜在交通冲突并阻断事故链。以上研究未涉及多车冲突在短时间内的连续风险,需要建立多个冲突间的因果关联并追溯风险源头,来实现城市公交车在混行交通中的聚集性风险量化分析。
在数据采集上,基于航拍车辆轨迹的方法能够结合车辆运动信息和交通信息。赵笑月等[3]使用无人机采集济青高速公路的视频数据,基于特征点匹配检测车辆以采集交通冲突数据。航拍车辆轨迹连续性好、运动参数精确,能够在不同场景下泛用,对交通安全风险研究具有较高的应用价值。
综上,目前对城市公交车行车风险的研究尚存在难以识别异车道风险、多车冲突关系未建立、安全风险分析不够量化等问题。因此,笔者基于广州市广州大桥路段车辆轨迹数据,建立扩展二维TTC 模型和时序性冲突树模型,形成城市公交车在区域混合车流中的安全风险量化分析方法。
1 研究方法
图1 为本研究的方法框架。在数据采集阶段,基于航拍交通视频的采集与车辆检测获取带有精细属性的车辆轨迹数据;在冲突识别与关联建立阶段,通过二维TTC 模型识别跟驰与变道冲突,并基于冲突树模型建立连锁冲突关联;最后量化分析公交车带来的交通安全风险。
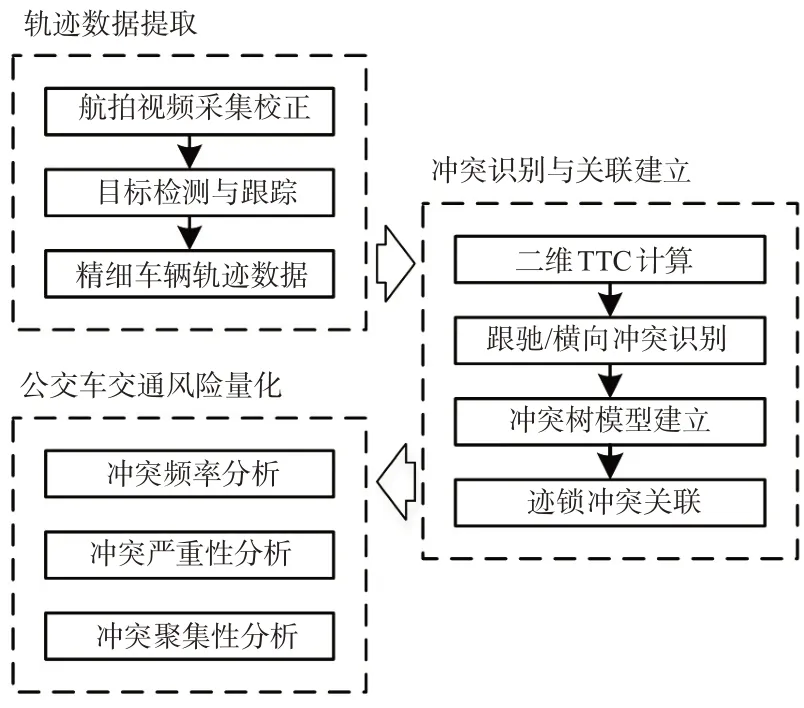
图1 方法框架Fig.1 Method framework
1.1 车辆轨迹数据提取
车辆信息提取的精度直接影响了交通冲突识别的准确性,笔者采取了基于深度卷积神经网络的车辆提取与跟踪算法,保证车辆轨迹的精确度。在车辆检测阶段,采用YOLOv4算法[19]提取车辆目标,该算法在提高准确度的同时保持了实时检测速度。为更好地表达航拍视频中的小目标车辆特征,采用航拍交通数据集VisDrone2019[20]训练网络特征权重,识别公交车(bus)和小汽车(car)这2类机动车。
在实际的航拍场景中的测试结果见表1,利用图像检测中的AP(average precision)和mAP(mean average precision)指标评价检测效果[21]。其中,AP值衡量某一类别的平均精度,其值为precision-recall曲线与坐标轴围成的面积;mAP值为所有类别的AP平均值。测试结果中mAP值达到90.82%,car 类型和bus类型的AP值分别达到99.25%和82.39%。

表1 车辆检测测试结果Tab.1 Test result of vehicle detection
采用DeepSORT 跟踪算法[22]对提取到的车辆目标进行轨迹跟踪,并进行图像像素与实际距离的比例换算,形成每1 辆车完整的行驶轨迹数据。同时提取车辆的其他精细属性,包括:x轴与y轴行驶速度、车辆实时所属车道及跟驰车辆ID 信息,其中x轴为图像中沿车道行驶方向轴,y轴为图像中车辆横向方向轴。带属性的车辆轨迹数据样例见表2,其时间精度为0.1 s,空间精度约为0.08 m/px。

表2 车辆轨迹数据样例Tab.2 Examples of vehicle trajectory data
1.2 二维TTC模型
对比较为成熟的冲突模型,碰撞时间是同时考虑车辆间速度差与距离的过程量,所需要的数据参数易于准确提取,相比于其他模型拥有较为广泛的实际应用。其定义为道路上的前后车辆若保持当前速度行驶将发生碰撞的时间,计算见式(1)。

式中:xi与xj分别为后车i与前车j的车头位置,m;ẋi与ẋj分别为它们的行驶速度,km/h;li为车辆i的车长,m。
TTC模型的条件中拟定了车辆均沿同车道方向行驶,只有跟驰中的前后车辆有发生冲突碰撞的可能性,因此在实际使用中无法预估变道与转向冲突。而实际中大型公交车常因行驶中变道而影响异车道多车辆正常行驶,为了保证冲突数据的完整性,需要提取精确的跟驰冲突与横向冲突支撑后续的分析。
基于经典TTC 模型,笔者提出能够同时识别纵向与横向冲突的二维TTC 模型。模型沿用了TTC的计算公式,纵向冲突即为经典TTC 识别的跟驰冲突,同时通过车辆轨迹中的横向位移与横向速度,识别横向冲突(包括侧面刮擦与变道冲突)。二维TTC计算见式(2)~(3)。
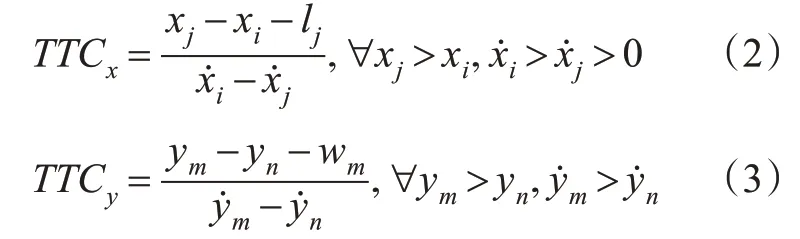
式中:i与j为前后车辆对;xi与xj分别为它们的x轴车头位置,m;lj为车长,m;ẋi与ẋj为x轴行驶速度,km/h;m与n为横向车辆对;ym与yn分别为它们的y轴右侧车辆位置,m;wm为车宽,m;ẏm与ẏn为y轴行驶速度,km/h。当TTCx小于阈值时出现跟驰冲突,TTCy小于阈值时出现横向冲突。
模型中跟驰中的前后车关系依靠车道线即可建立,横向冲突中的车辆对关系的建立却没有明确的界线。如图2 所示,通过车辆在x轴位置建立横向冲突的车辆对关系。2 车发生横向冲突必须满足的位置条件有:①车辆在行驶过程中存在某一时刻,它们并列行驶且横向TTC小于冲突阈值;②若保持同样的横向速度行驶,车辆将发生碰撞,此时它们仍为并列行驶。因此,当相邻车道2车满足以下关系,则能够建立车辆对关系。
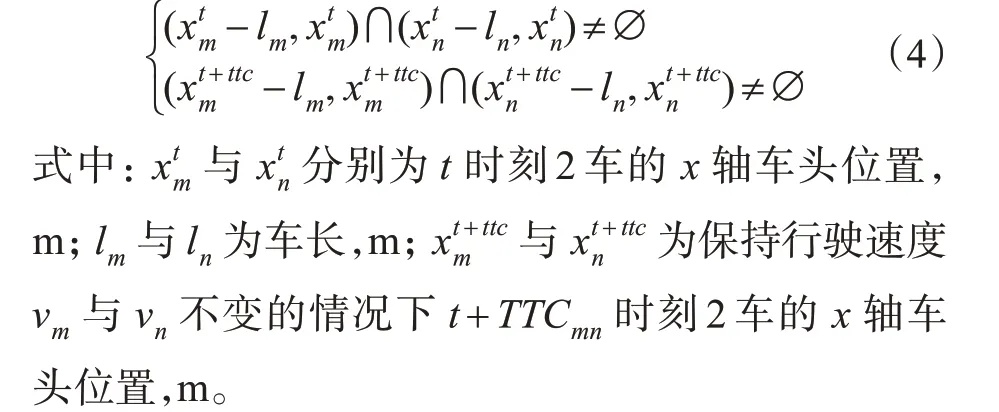
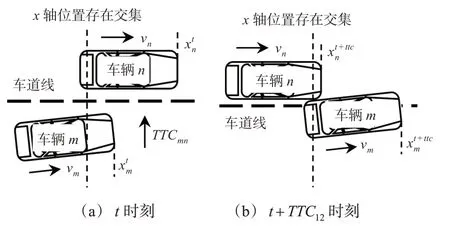
图2 横向车辆对关系建立条件Fig.2 Conditions to establish lateral vehicle pairs
1.3 连锁冲突识别方法
混合机动车流中常出现多个冲突连续发生,其危险性比冲突逐一发生更大,因此需要建立考虑多车辆冲突的风险模型。
由图3(a)~(b)可见:已有研究中建立了车辆群模型[16]和事故链模型[17-18]。其中,车辆群模型利用车辆位置及车间距将多车道车辆分为多个群体,并以群内平均TTC和PET评估车辆群风险度。该方法将具有潜在关系的多车辆划分为群块结构,实现了风险区域的快速识别,但未量化群内个体间的冲突相互影响。事故链模型则将每个车辆与附近车辆建立状态网络,依据车辆行驶状态与外界状态(天气等)计算每个链条的状态危险度,危险度等级高的多个相邻车辆形成事故链。该方法能够识别车辆间互相关联的潜在风险,对阻断连续碰撞风险有较好的应用价值。
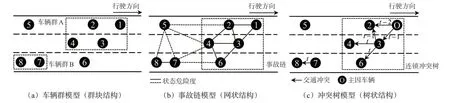
图3 不同方法的模型结构对比Fig.3 Model structure comparison of different methods
为了实现短时间内聚集区域行车连续风险的识别与量化,笔者根据车辆冲突时的避险反应,建立冲突树模型,见图3(c),将冲突的连锁过程转化为树结构的动态生成。相比较其他方法,这种结构通过上下结点关系易于建立车辆之间的冲突作用关系并分析连续风险的致因。

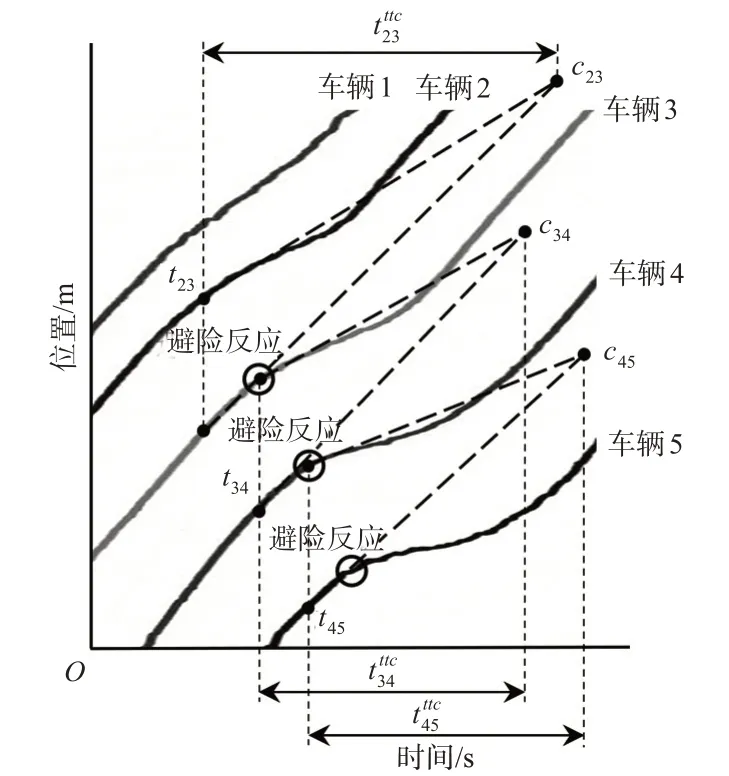
图4 连锁冲突的刺激-反应过程Fig.4 The stimulus-response process of chained conflict
将连锁冲突效应视为树模型的建立,其根结点为造成连锁冲突的主因车辆,树模型中该车辆直接造成的冲突为直接冲突,其他为连锁冲突,冲突树中的冲突个数体现了该连锁冲突效应的严重性。对于某观测时段中按时间排列的所有冲突(p=1,2,…,N)建立冲突树的关系结构。

2 实验与分析
2.1 数据采集
使用DJI Phantom 4 型号无人机于广州市广州大桥路段进行数据采集,所拍摄路段总长约1 100 m,设计速度为60 km/h,包含了广州大桥北公交站的2 个站台停靠点,共于7 个场景拍摄了约20 h 的航拍视频,部分场景见图5。从该路段数据中提取了66 559条车辆轨迹,包括2 571条公交车的轨迹。

图5 数据采集部分场景Fig.5 Parts of data collection scenes
采用二维TTC模型计算每辆车在行驶过程中与其他车辆的碰撞时间,定义车辆i与车辆j行驶中在一定时间范围Δt内仅可能发生1 次冲突,当2 辆车出现某一段时间的碰撞时间小于阈值t*时出现交通冲突,且TTCij为该过程中的最小碰撞时间。实验中Δt设为10 s,依据经验将阈值t*设为3 s[23],对碰撞时间小于3 s内的冲突数据进行分析。以此标准,共识别得到92 398 条冲突数据,其中包括63 848 条跟驰冲突和28 550 条横向冲突,每条冲突数据包括的全部属性见表3。
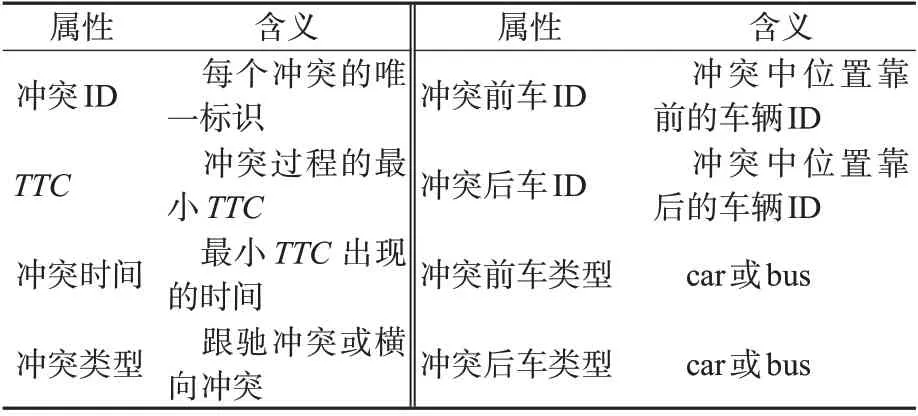
表3 冲突数据属性含义Tab.3 Attributes meaning of conflict data
2.2 连锁冲突识别效果
所识别的某一连锁冲突链的发生过程见图6,图6(a)中车辆1 705与1 713发生根冲突,车辆1 713为主因车辆,而后共6辆车形成了一串连续的冲突树,其中图6(b)和图6(d)为与主因车辆1 713发生的直接冲突,图6(c)与图6(e)为主因车辆1 713 造成的连锁冲突。
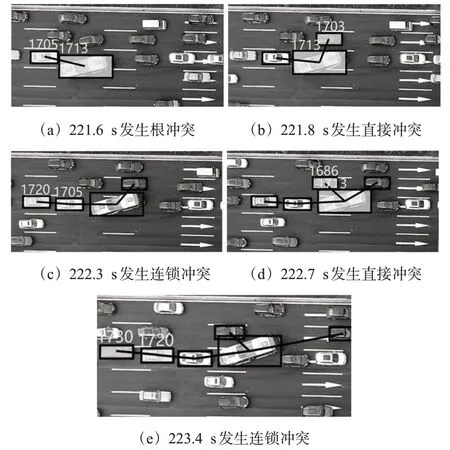
图6 连锁冲突识别示例Fig.6 Examples of chained conflict identification
连锁冲突中车辆的速度变化见图7,分析该冲突树中车辆行驶速度变化可知,根冲突(a)由车辆1 713变道行为引起,并对车辆1 705产生刺激;车辆1 705于222.3 s发生减速避险反应,从而形成了冲突(c),并对车辆1 720产生刺激;车辆1 720于223.4 s发生减速避险反应,从而形成了冲突(e)。可视化及车辆速度分析验证了冲突树模型对连锁冲突的识别效果。
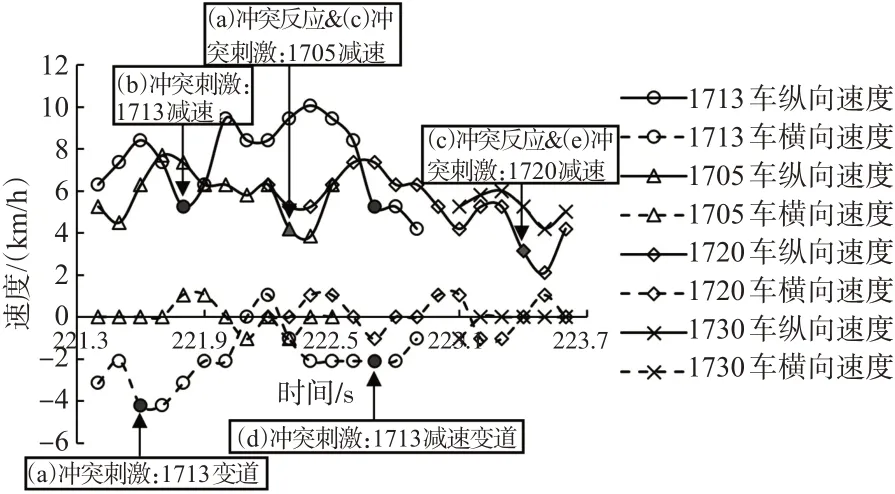
图7 连锁冲突中车辆的速度变化Fig.7 Speed changes of vehicles in chained conflicts
2.3 公交车冲突频率分析
为了研究城市公交车带来的交通安全风险程度,并在不同路段交通状态下进行量化对比,笔者将采集路段数据分为4个交通状态分析公交车形成交通冲突的频率。4个交通状态分别为:①交通处于拥堵流,平均车速小于10 km/h;②交通处于拥堵强制流,平均车速为10~20 km/h;③交通处于非拥堵不稳定流,平均车速为20~30 km/h;④交通处于畅通状态,平均车速大于30 km/h。将数据按照1 min 的时间间隔划分为若干样本,共得到614个有效样本,并提取每个样本内公交车与小汽车的冲突数据,按照式分别计算平均每辆车1 min内的冲突次数,即为第z个样本的冲突频率。

式中:cl为car 或bus;为第z个样本中cl类型车辆发生的冲突数;为第z个样本中cl类型车辆的数量。
不同交通状态下2类车辆的冲突频率累积频率图见图8。由图8 可见:①相比较小汽车,公交车的平均冲突频率分布普遍后移,且交通状态越拥堵,2种车辆的冲突频率分布差异越明显;②在Vˉ<10 km/h的状态下,30%以上的样本中公交车的冲突频率超过9次/(veh·min)(最高的样本中达23次/(veh·min)),城市公交车在拥堵流中对交通安全风险影响极高。
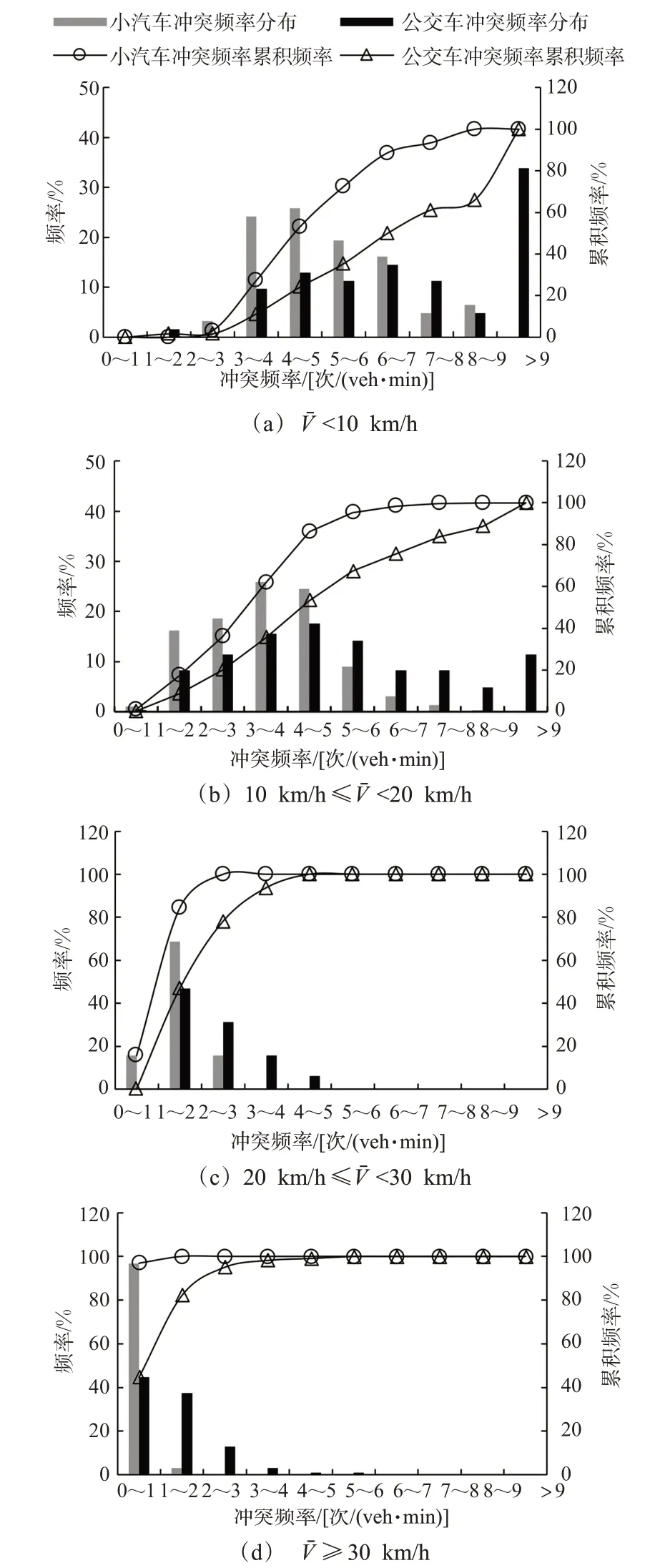
图8 2类车辆的冲突频率累积频率图Fig.8 Cumulative frequency diagrams of conflict frequency of the 2 types vehicle
2.4 公交车冲突严重性分析
车辆对之间的碰撞时间越小,留给车辆的反应时间越短,发生碰撞的概率越大,因此TTC的数值大小在一定程度上能够衡量交通冲突的严重性。在4 种交通状态下,分析采集的冲突数据中TTC的分布,见图9。从TTC分布上可以看出,对于小汽车来说,其冲突碰撞时间在前3个状态分布几乎不变,交通畅通状态下TTC更集中于中部;对于公交车来说,在越拥堵的状态下其冲突碰撞时间分布越靠近小区间,冲突严重性越高。从累积频率上可以看出,公交车与小汽车的冲突严重性在拥堵流与强制流状态下差异最大,且差异集中在0~0.6区间,该区间内公交车冲突分布高于小汽车1倍以上。
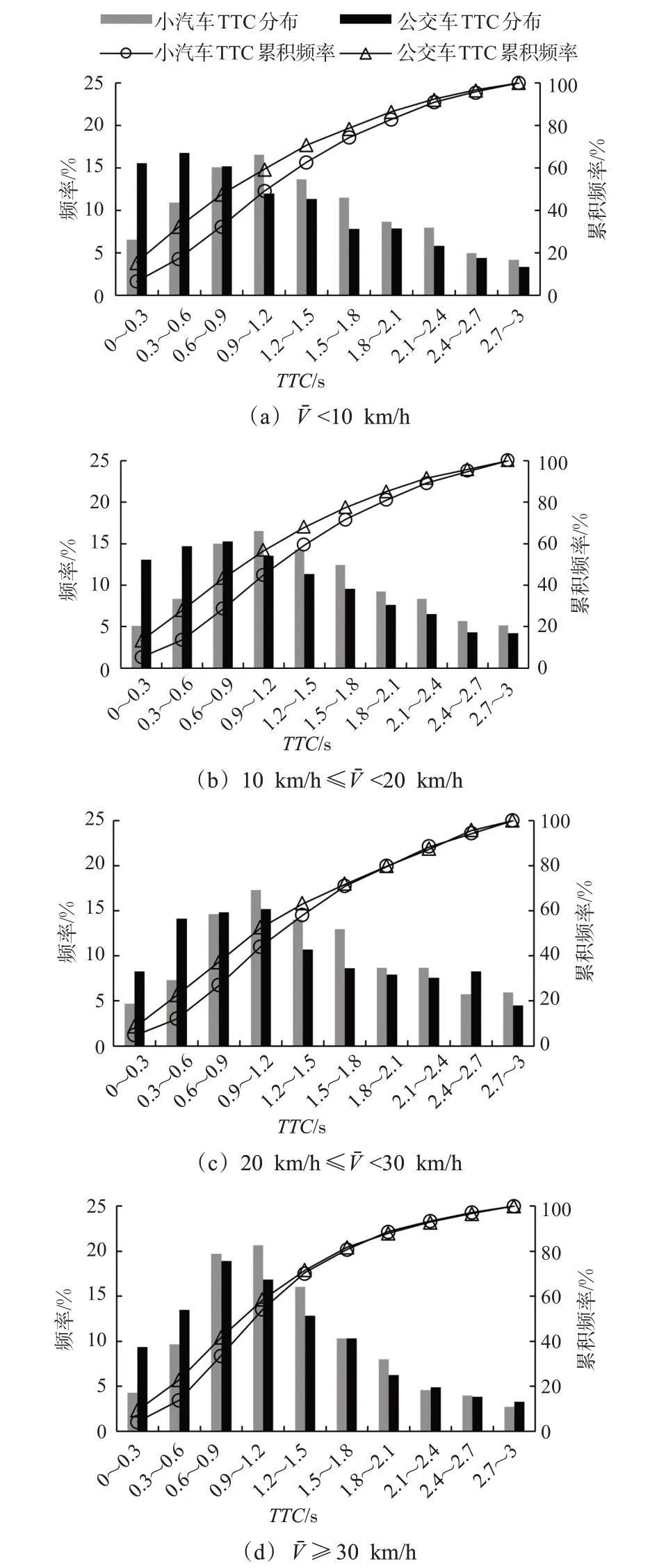
图9 2类车辆的冲突TTC累积频率图Fig.9 Cumulative frequency diagrams of conflict TTC of the 2 types vehicle
为量化交通冲突的严重性,按照累积频率的方法[24]划分严重性等级,将所有冲突样本的TTC按照从小到大排列,以前15%为严重冲突阈值,50%为中度冲突阈值,85%为轻微冲突阈值,得到严重冲突阈值为0.44 s,中度冲突阈值为1.20 s,轻微冲突阈值为2.18 s。3种等级的冲突统计结果见表4,公交车的严重冲突率达33.39%,该比例是小汽车的2倍。

表4 不同严重性等级的冲突统计结果Tab.4 Conflict statistics of different severity levels
针对不同交通状态下的冲突严重性,依据3 个冲突等级进行分析。采集数据中4个状态下的公交车比例分别为4.00%,3.66%,3.65%,4.17%,为进行等量对比,均折算为4.00%。表5为不同状态下的冲突严重性分析结果,包括对2种车辆的严重/中度/轻微冲突率、冲突频率和折算公交车冲突比例的分析。由表5可见:①在拥堵状态下,公交车的严重冲突率高达40.71%,平均每辆公交车每分钟形成2.63个严重冲突,该状态下公交车的安全风险影响极高;②在畅通状态下,当平均车速达到30 km/h 以上,小汽车的冲突频率大幅度降低,严重冲突率仅为11.37%,相应地,公交车的指标降幅较小,严重冲突率仍达到24.01%,此时比例最高的中度冲突率达47.91%;③在冲突频率上,在所有交通状态下公交车冲突频率均为小汽车的1.5~2 倍,其中严重冲突高达2.5~5 倍,远远高于交通研究中常用的大型车折算系数(平地上为1.5);④对比折算公交车冲突比例与折算公交车数量比例(4.00%)可知,公交车冲突比例远远高于其车辆数比例,拥堵状态下超过10%的严重冲突均由公交车形成,而畅通状态下17.25%的严重冲突由公交车形成。

表5 冲突严重性分析结果Tab.5 Analysis result of conflict severity
2.5 公交车冲突聚集性分析
考虑到连锁冲突会造成区域内多个冲突不断聚集,多个车辆行驶速度与方向发生变化,车辆难以即时采取措施避免碰撞,这种情况下更易造成交通事故。
将1.3 节所介绍的多车冲突模型与连锁冲突树进行实例对比分析,间隔10 s记录2个时刻聚集性风险的识别结果,包括每种方法识别出的聚集性风险数量以及每个风险内部涉及到的车辆数和风险程度指标,见表6。以时刻1为例,3种方法识别出的聚集风险数分别为11,3,3;11个车辆群内涉及的车辆数分别为12,2,2,2,3,7,2,2,3,6,2,按照该模型计算得到的各群体行车风险度分别为0.167,0,0.5,0,0,0.286,0,0,0,0.333,0;3个事故链内涉及的车辆数分别为4,5,3,其中高危险的链条数分别为2,3,2;3个冲突树内涉及的车辆数分别为4,7,3,其中树内关联的冲突数量分别为3,7,2,以及各冲突树中每个冲突形成的时间分别为[0.4,0.7,1.6],[1.9,3.2,3.2,3.2,4.8,4.9,6.2],[0.2,2.5],整个冲突树的持续时间分别为1.2,4.3,2.3 s,第1个造成连续性冲突的车辆类型为car、bus和bus。
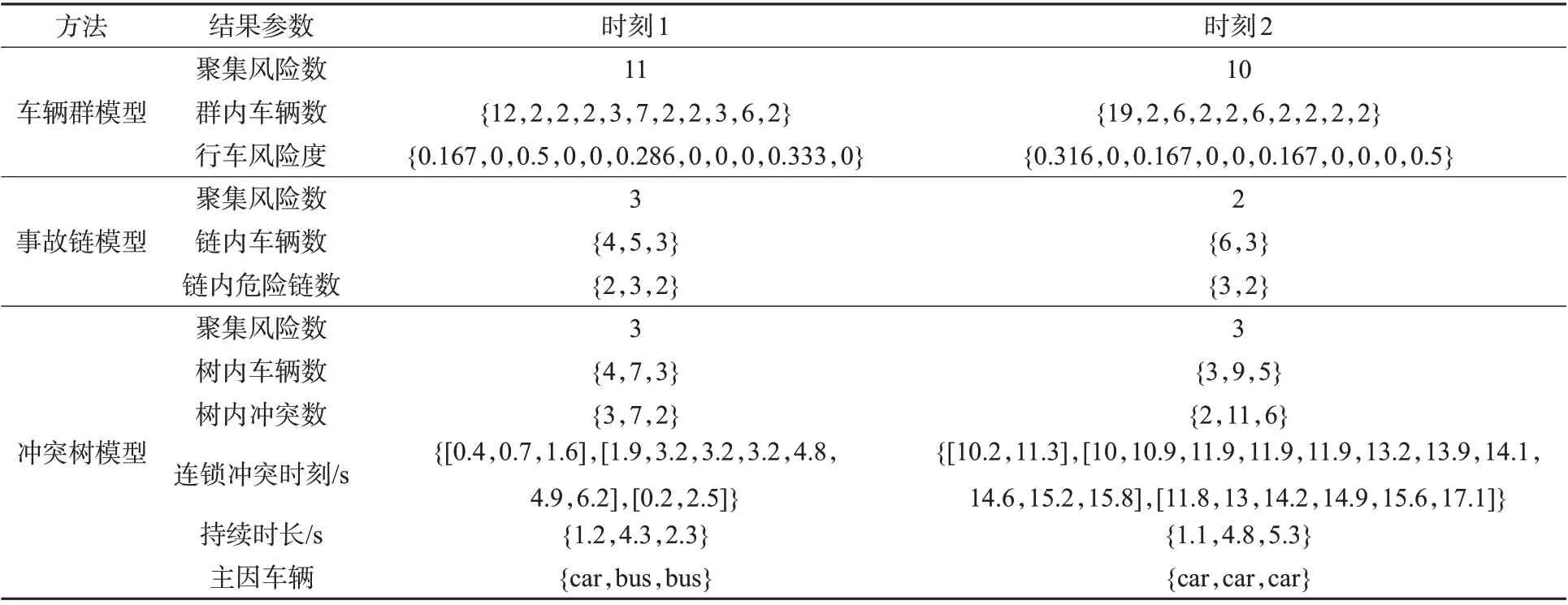
表6 不同方法量化聚集性交通风险的结果对比Tab.6 Comparison of the results from different methods to quantify gathered traffic risks
3 种方法均可以识别某一时刻聚集的高风险车辆,其中车辆群模型划分出的群体数最多,但有多数行车风险度为0;事故链模型与冲突树模型识别出的聚集风险相似,但事故链模型的危险链数比链内车辆数少30%~50%,这是由于事故链内车辆并未在该时刻全部由危险链关联;而冲突树还能识别多车风险在短时间内造成的其他关联冲突,因此树内所含冲突数量更多。相比其他方法,冲突树模型能够借助连锁冲突跟踪该聚集性高风险的持续发展,并能够追溯主因车辆类型。
因此对比不同交通状态下的冲突连锁效应,以量化公交车冲突聚集性。采用冲突连锁效应比例衡量冲突聚集性概率,其定义为某种车辆群体在一段时间内参与到连锁冲突中的冲突数比例;采用平均冲突树长度衡量冲突聚集范围大小,其定义为平均每个冲突树中的冲突次数。
采集严重与中度冲突数据进行分析,连锁冲突识别结果见表7,14.67%的小汽车冲突形成了连锁冲突,平均冲突树长度为3.18次;30.75%的公交车冲突形成了连锁冲突,平均冲突树长度为4.23次。

表7 连锁冲突识别结果Tab.7 Results of chained conflict recognition
冲突连锁效应比例见图10。拥堵状态下35%以上的公交车交通冲突形成了连锁效应,比起小汽车高出1倍,公交车为连锁冲突形成的重要主体;畅通状态下该比例则大幅度减少,在平均速度大于30 km/h的状态下几乎不存在冲突连锁效应。平均冲突数长度分析结果见图11。拥堵状态下公交车引起的冲突树长度平均比小汽车高出1 次冲突,冲突聚集范围更广;畅通状态下则相对较低。
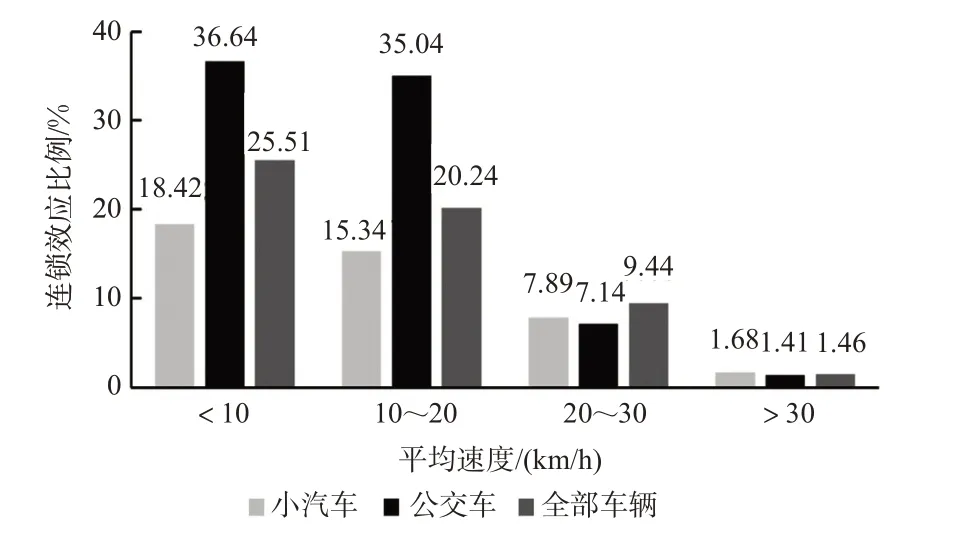
图10 冲突连锁效应比例结果Fig.10 Results of the conflicts chain effect proportion
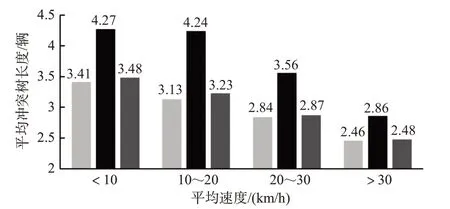
图11 平均冲突树长度分析结果Fig.11 Results of average conflict tree length analysis
3 结束语
1)笔者将经典的碰撞时间扩展为二维TTC 模型,构建了跟驰冲突与横向冲突数据;根据车辆行驶刺激-反应理论建立冲突之间的关联,将区域连锁冲突抽象为含时序性的冲突树并实现识别;同时将所提出的冲突技术应用在实际数据中,提供了1种研究城市公交车在区域混合交通中的冲突风险量化方法。
2)冲突树模型能够有效地依据连锁冲突量化聚集性交通风险,并实现连锁过程的微观重构和主因车辆的追溯。在实例分析中:拥堵流中公交车的冲突频率极高,30%的公交车冲突超过9 次/min;公交车的严重冲突率为小汽车的2.5~5 倍,拥堵状态下达40%;公交车造成的连锁冲突比例为小汽车的2倍,拥堵流中该比例高达36%,影响车辆数也更多,在聚集区域内事故风险大大提高。通过量化分析可知,任何交通状态下公交车给混合交通带来的安全风险都更大,尤其在拥堵状态下公交车与小汽车的风险差异最大。
3)经过城市公交车风险分析,可以从实际数据中得到某路段中公交车在各交通状态下的运行风险程度,从而为安全风险防范、公交专用道规划等措施提供理论基础。
4)本文仅针对城市基本路段研究公交车行车风险的量化分析方法,若应用在快速路匝道、无信号灯交叉口等特殊路段,还需要验证分析方法并补充量化指标。此外,后续研究中可以基于车路协同将连锁冲突应用于连续行车风险的实时预警。
