中低速磁浮列车测速系统研究分析与工程化应用
2022-07-20张益晨王丽艳
张益晨 王丽艳
(北京轨道交通技术装备集团有限公司, 100160, 北京∥第一作者, 高级工程师)
近年来,中低速磁浮系统因其列车具有环境友好、爬坡能力强、转弯半径小等优势在国内外得以快速发展。目前国内已开通的中低速磁浮线路有北京地铁S1线、长沙机场快线。中低速磁浮列车的测速系统关系到列车运行的控制、牵引和制动,是列车安全、可靠运行的基础和保障[1]。由于磁浮列车运行时与轨道无接触,基于轮对的传统计轴测速方案不适用于磁浮列车测速。
目前国内外非接触式测速定位方案主要有4种:①基于交叉感应环线的测速[2]和相对定位方案;②基于雷达的测速与相对定位方案;③基于齿槽计数的测速与相对定位方案;④基于感应轨枕的测速与相对定位方案[3-4]。综合线路建设和设备维修成本,考虑测速装置的准确性和稳定性,北京地铁S1线、长沙机场快线均采用第4种测速定位方案,该方案又称为“传感器计数法”。
1 传感器计数法的测速原理
传感器计数法是在列车上设置一定数量的传感器,以传感器的间距作为测速的基准。当列车沿运行方向行进,轨枕经过传感器时,传感器将受到轨枕的触发并产生脉冲[5]。如图1所示,长方形为轨枕,A1—A6为6个安装在磁浮列车底部的电感式接近开关传感器,各传感器间的距离相等。轨枕间矩为40 cm、80 cm或120 cm不等。

图1 传感器安装俯视示意图Fig.1 Diagram of sensor installation top view
列车运行时,轨枕依次划过这6个传感器后会产生一系列脉冲。图2为北京地铁S1线测速传感器输出信号的实录波形。由图2可看出,相邻方波的间隔稳定。相邻方波代表列车相邻2个传感器(距离为d)通过同一轨枕所用的时间。如果得到方波的时间间隔为t,即可通过v=d/t求出列车的速度。传感器计数法的原理就是不停地求出相邻方波的时间间隔,进而得到列车的速度。

图2 北京地铁S1线列车测速传感器实录波形截图Fig.2 Recorded waveform of train speed sensor of Beijing Metro Line S1
传感器计数法应用到已运营中低速磁浮线路后,测速系统在列车运行过程中主要存在2个问题:①测速系统在低速段测速误差较大;②测速系统在加速、减速过程中测速误差较大。这2个问题在很大程度上影响了列车运行的精准控制。
2 工程化应用中的误差分析
本文以北京地铁S1线的工程化应用为基础,建立数学模型,对测速系统的设计误差进行理论分析[6]。
2.1 模型假设
基于3个假设搭建数学模型:①在传感器的间距范围内只考虑列车的匀速、匀变速运动,不考虑列车的变加速、变减速运动;②不考虑测量误差、计算误差;③不考虑传感器信号采样、电路处理、中央处理器计算、测速信号输出等产生的时间延时。
2.2 传感器计数法测速误差分析
在列车运动过程中,传感器相继被轨枕触发,设相邻传感器的间距为d,任意相邻传感器被触发的时间间隔为t,如图3所示。根据传感器计数法原理,可计算得到此时测速系统输出的速度值v1:
v1=d/t
(1)
2.2.1 列车处于匀变速状态时的误差分析
列车处于匀加速/匀减速运动状态时,设列车的加速度为a,相邻传感器An、An+1、An+2被依次触发时的瞬时真实速度分别为vn、vn+1、vn+2。基于传感器计数法的测速原理示意图如图3所示。

图3 基于传感器计数法的测速原理示意图Fig.3 Schematic diagram of speed measurement principle based on sensor counting method

(2)
当An+1被触发时,v1,输出与vn+1的差值即为测速系统采用传感器计数法时的最小误差ve1,匀变速,min:
(3)
当An+2被触发前,v1,输出与vn+2的差值即为测速系统采用传感器计数法时的最大误差ve1,匀变速,max:
|ve1,匀变速,max|<|vn+2-v1,输出|
(4)
由此可得到ve1,匀变速,max的计算式为:
|ve1,匀变速,max|<
(5)
2.2.2 列车处于匀速状态时的误差分析
列车处于匀速状态时,a=0。v1,匀速与vn、vn+1的关系为:
v1,匀速=vn=vn+1=vn+2
(6)
根据上述分析,可知测速系统输出的速度与真实速度相等,即列车在匀速状态下速度误差ve1,匀速为0。由式(4)~(5)可知,当a>0时:

(7)
当a<0时:
(8)
当a=0时:
ve1,匀速=0
(9)
2.3 北京地铁S1线测速误差分析
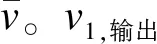
将v1,匀加速和v1,匀速统称为传感器计数法下的速度输出值v1,输出,其产生的速度误差为ve1,最大速度误差为ve1,max。为了进一步增加模型分析的直观性,本文以北京地铁S1线相关参数为例进行分析,相邻传感器间距d=0.24 m。列车减速运行时,取a=-1 m/s2。将d、a代入式(7)~(9),可得到ve1的计算式为:
ve1<-3/(25v1,输出)
(10)
以v1,输出为横坐标,ve1,max为纵坐标,得到d=0.24 m,a=-1 m/s2时基于传感器计数法的传感器测速最大误差曲线如图4所示。
图4 基于传感器计数法的传感器测速最大误差曲线Fig.4 Curve of maximum error of sensor speed measurement based on sensor counting method
综上分析可知:①列车匀速运动时,ve1=0;②测速系统的误差与传感器间距、列车的加/减速度、测速系统当前输出速度相关;③传感器间距越小,测速系统的误差越小,二者成正相关;④在传感器间距固定且测速系统当前输出速度均相同的条件下,列车的加/减速度与测速系统的误差成正相关;⑤在传感器间距固定且列车的加/减速度固定时,测速系统当前输出速度越低,测速系统的误差在输出速度中所占的比重越大。
3 中低速磁浮列车测速系统在工程化应用中的解决措施
综上所述,中低速磁浮列车测速系统的准确性与传感器间距、列车运动过程中加/减速度相关。基于电磁感应传感器的工作原理,相邻传感器的间距不能无限制地缩小。若要进一步减小现有测速方式的设计误差,提高测速精度,可以通过增加线性加速度计的措施来校准上述数学模型中ve1范围内的输出速度值,从而减小前后速度值间的阶跃值。该解决措施已在工程化应用中得以验证[7-8],可在很大程度上改善列车低速运行及加减速时产生的测速误差。
3.1 列车测速系统误差的修正与补偿
根据加速度计法的工作原理,本文重点对列车在低速段运行时的系统误差进行分析。设列车初始时刻t0时测速系统的输出速度为v0,加速度计输出的加速度值为a0,加速度的更新频率为f,根据加速度积分公式,可得到测速系统在加速度计法下t0+1/f时刻的速度输出值v2为:

(11)
式中:
v2——测速系统在t0+1/f时刻的速度输出值。
在工程应用中,非匀速工况下的列车加速度值是实时变化的。根据加速度公式,列车运行速度真实值的计算式为:
(12)
式中:
a(t)——列车实时加速度值;
v真实——测速系统在t0+1/f时刻的真实速度值。
设加速度计法下的速度输出值为v2,输出,由式(11)与式(12)可得到加速度计法下列车测速系统的速度误差ve2为:

(13)
由式(13)可知,1/f越小,ve2越小。加速度计法下测速系统的最大速度误差ve2,max为:
ve2,max=±(|a|max/f)
(14)
增加加速度计后,测速系统的速度输出时程曲线如图5所示。

图5 增设加速度计后的列车测速系统速度输出时程曲线Fig.5 Speed output time-history curve of train speed measurement system after adding accelerometer
3.2 列车测速系统的误差特点分析
将加速设计法作为传感器计数法的补偿方法后,列车测速系统的速度输出波形如图6所示。由图6可看出,与实施加速度补偿后相比,实施加速度补偿前列车在低速运行区段电感式传感器被触发而产生的速度值v1,输出的离散度较大,产生的系统误差也较大;加速度补偿后,列车在低速运行区段输出的速度值v2,输出连续性较高,产生的系统误差较小。

注:“停车”指测试列车停止运行。图6 实施加速度补偿前后列车测速模型速度输出时程曲线对比Fig.6 Speed output time-history curve of train speed measurement model before and after acceleration compensation
加速度计拟合的速度时程曲线在短时间内精度较高,但由于加速度计本身有一定的温度漂移误差,导致其积分测速存在累积误差,因此在工程应用中应利用测速传感器对加速度计进行校准。结合传感器测速存在列车低速运行区段误差大、精度低的情况,在实际应用中可将传感器计数法和加速度计法进行综合,即在列车低速运行(v<30 km/h)区段以加速度计测速为主,传感器计数法测速为辅;在列车高速运行(v≥30 km/h)区段以传感器计数法测速为主,加速度计测速为辅。
使用该综合测速系统的速度输出值v(t)及速度误差ve的计算式分别为:
(15)
(16)
4 结语
对于非接触式列车测速系统而言,影响其速度输出的因素主要有两个方面:内部因素包括传感器、元器件、电路的设计、软件的编制等;外部因素包括轨道、转向架、测量高度的变化、水平度的变化、电磁干扰等。此外,天气等也是影响该系统性能的潜在因素。因此,建立一个理想的列车测速数学模型是相当困难的,在完成系统模型的分析和设计、仿真验证其控制算法的正确性后,还必须进行实际检验,用以对模型算法作进一步的优化设计。
本文所述的列车测速系统在中低速磁浮列车工程化应用中得到了充分的验证,但该列车测速技术仍存在难点和瓶颈,主要体现在中低速磁浮列车起动加速或者低速制动减速的过程中,列车在垂向存在上下波动,这将对传感器检测到的信息产生直接的影响,因而给列车测速系统输出准确的速度带来了一定的难度。